四站时差定位精度分析
- 格式:pdf
- 大小:175.00 KB
- 文档页数:3

I G I T C W导航 天地GNSS World12DIGITCW2024.040 引言无源定位是辐射源信息获取中重要的一方面[1-3]。
常用的定位方法适用于不同的平台数量,但通常平台样式较为单一,容易受到影响,目前缺乏有效的跨平台协同定位方法。
地球同步轨道(GEO )卫星与地球相对静止,对地观测范围大,能够全天时、全天候工作,具有较强的信号接收能力,并能够对信号进行透明转发。
将其与常规机动平台相结合,能够对辐射源进行高效定位。
本文在测向时差定位算法基础上[4-6],利用GEO 卫星和机动平台相互配合,提出星地协同测向时差定位算法。
传统双星或三星平台定位中需要主邻星波束同时覆盖目标,该算法避免了寻找匹配邻星的问题,且无需高程辅助信息就能对目标进行三维定位[7-10]。
1 算法原理1.1 定位模型星地协同测向时差定位系统由一个侦收主站和一个GEO 卫星构成。
一方面,主站可测得辐射源到主站的方位角和俯仰角;另一方面,主站分别接收辐射源直达信号和经卫星透明转发的信号,并计算得到时间差,由此可计算出距离差。
从几何意义上说,求解空间目标位置的过程即是求解3个曲面(由确定的射平面、由确定的圆锥面以及由确定的双曲面)交点的过程。
假设主站、G E O 卫星的空间位置分别为:、,目标的空间位置为。
目标到主站和GEO 卫星的基线长度分别为(),GEO 卫星到主站的距离为。
几何关系如图1所示。
根据以上观测量,可以得到一个三元二次方程组:1)基于EKF的星地协同测向时差定位算法王 哲(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)摘要:针对无源定位协同化需求,文章提出一种利用到达角、到达时间差的星地协同定位方法,分别研究其定位原理,建立数学定位模型,给出解算方法以及定位精度的表达式,推导基于测向时差参数的扩展卡尔曼滤波(EKF)算法。
仿真结果表明该方法能够达到较高的定位精度;此外,该定位模型仅需单星,避免了传统星载平台定位需要寻找匹配邻星的问题,与机动平台配合,可对辐射源进行快速高效定位,具备一定的工程应用价值。

《基于时差频差联合的道路行驶车辆定位算法研究》篇一一、引言随着智能交通系统的快速发展,车辆定位技术已成为道路交通管理和自动驾驶等领域的重要研究内容。
时差定位和频差定位作为两种常见的车辆定位方法,具有各自的优点和局限性。
本文将研究基于时差频差联合的道路行驶车辆定位算法,以提高车辆定位的准确性和实时性。
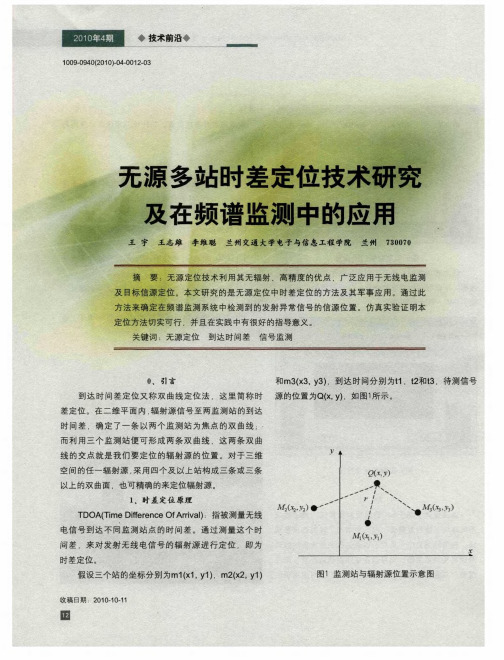
二、时差定位和频差定位的原理及应用(一)时差定位时差定位(TDOA,Time Difference of Arrival)是通过测量信号传播时间的差异来计算目标位置的一种方法。
在车辆定位中,时差定位通常利用多个基站接收到的信号时间差来计算车辆的位置。
这种方法具有较高的精度,但需要较高的时间同步精度和信号传输的稳定性。
(二)频差定位频差定位(FDOA,Frequency Difference of Arrival)是通过测量多个接收器对同一信号频率的接收差异来计算目标位置的一种方法。
在车辆定位中,频差定位可以有效地克服多径效应和信号遮挡等问题,但需要精确的频率测量和同步。
三、基于时差频差联合的车辆定位算法研究(一)算法原理本文提出的基于时差频差联合的车辆定位算法,结合了时差定位和频差定位的优点。
算法通过同时测量多个基站接收到的信号时差和频差,利用多维度信息对车辆位置进行估计。
该算法可以有效地提高车辆定位的准确性和实时性,同时降低对时间和频率同步精度的要求。
(二)算法实现1. 信号采集:通过多个基站同时接收车辆发出的信号,获取信号的时域和频域信息。
2. 数据预处理:对采集到的数据进行滤波、去噪等预处理操作,以提高数据的可靠性。
3. 时差和频差计算:根据预处理后的数据,计算多个基站接收到的信号时差和频差。
4. 位置估计:利用时差和频差信息,结合多维度信息估计车辆的位置。
5. 结果输出:将估计出的车辆位置信息输出,供后续应用使用。
(三)算法性能分析本文通过仿真实验和实际道路测试,对基于时差频差联合的车辆定位算法进行了性能分析。
室内定位技术中的定位算法的实时性与精度评估方法研究与结果比较分析随着智能移动设备的普及和应用场景的不断扩展,室内定位技术的需求愈发迫切。
室内定位算法作为室内定位技术的核心之一,是确定用户在室内环境中准确位置的重要手段。
本文将探讨室内定位算法的实时性与精度评估方法,并对常见的定位算法进行结果比较分析。
一、实时性评估方法为了评估室内定位算法的实时性,我们可以借鉴以下几种方法:1.1 到达时间差(Time of Arrival, TOA)方法这种方法主要基于无线信号的传播速度测量,根据定位系统发送信号和接收信号之间的时间差来计算用户的位置。
TOA方法具有较高的精度和实时性,但对硬件要求较高。
1.2 到达时间差差(Time Difference of Arrival, TDOA)方法与TOA方法类似,TDOA方法也是通过测量信号在不同基站之间的到达时间差来计算用户位置。
相较于TOA方法,TDOA方法更适用于多基站组网的场景,并具有较高的实时性。
1.3 接收信号强度指示(Received Signal Strength Indicator, RSSI)方法这种方法主要通过测量接收器接收到的信号强度来估计用户的位置。
RSSI方法成本较低,但准确性会受到多种因素的影响,如障碍物、信号衰减等。
因此,在使用该方法评估实时性时,需要根据具体信号强度与距离的映射关系进行校准。
二、精度评估方法为了评估室内定位算法的精度,以下几种方法可供参考:2.1 均方根误差(Root Mean Square Error, RMSE)方法RMSE是衡量定位算法结果与真实位置差异的一种常用指标。
通过计算算法定位结果与真实位置坐标之间的欧氏距离,然后求平均数并开根号得到RMSE值。
较小的RMSE值代表较高的定位精度。
2.2 平均误差(Mean Error, ME)方法ME指标表示算法定位结果与真实位置坐标之间的平均误差。
计算方法是将所有定位误差的绝对值求和,再除以总计定位点的数量。
GPS差分定位技术的原理与方法GPS(全球卫星定位系统)差分定位技术是一种基于卫星导航系统的高精度定位方法。
通过差分定位技术,可以提高GPS信号的精度,并消除许多常规GPS定位中的误差。
本文将介绍GPS差分定位技术的原理与方法。
一、GPS定位原理GPS定位原理是基于接收来自多颗卫星的信号,通过计算所接收的信号在时间和空间上的差异,从而确定接收器的位置。
GPS定位原理的核心是三角测量原理,即通过测量卫星发送信号的时间差来确定接收器的位置。
由于GPS信号的传播速度非常快(每秒约300,000公里),所以接收器只需测量很小的时间差即可精确定位。
二、GPS定位误差然而,由于一些因素的干扰,GPS定位中存在一定的误差。
主要的定位误差包括钟差误差、大气延迟、多径效应和接收器误差等。
1. 钟差误差:卫星和接收器内部的时钟可能存在微小的不同步,这会导致测量时间差的误差。
为了解决这个问题,GPS系统会周期性地向接收器发送时间校正信息,使接收器的时钟与卫星同步。
2. 大气延迟:GPS信号在穿过大气层时会受到大气延迟的影响,导致信号的传播速度变慢。
这会引起定位误差。
为了消除大气延迟的影响,差分定位技术采用一种参考站的数据来校正信号。
3. 多径效应:多径效应是指GPS信号在传播过程中会经过多个路径,其中部分路径是经过地面反射的。
当接收器接收到这些反射信号时,会产生干扰,导致定位误差。
差分定位技术通过使用基准站的数据来判断和校正多径效应。
4. 接收器误差:接收器本身也可能存在一些误差,例如机械误差、电子噪声等。
这些误差会影响GPS定位的准确性。
三、GPS差分定位技术差分定位技术是一种通过比较基准站的测量结果和移动站的测量结果,来校正移动站定位误差的方法。
差分定位技术主要分为实时差分定位和后续差分定位两种。
1. 实时差分定位:实时差分定位是指在接收器接收GPS信号的同时,将同一时间基准站接收到的信号数据通过无线电或互联网传输给移动站,移动站利用基准站的数据来校正定位误差。
TDOA(Time Difference of Arrival)到达时间差算法是一种在无线通信、雷达和声学等领域广泛应用的定位技术。
该算法通过测量信号到达不同接收点的时间差,结合已知接收点的位置信息,计算出信号源的位置。
TDOA算法具有高精度、高可靠性和适应性强等优点,因此在许多实际应用中发挥着重要作用。
一、TDOA算法的基本原理TDOA算法的基本原理是基于信号在不同接收点之间的传播时间差来定位信号源。
当信号源发出信号时,信号会同时传播到多个接收点。
由于信号传播速度已知(例如电磁波在空气中的传播速度约为光速),可以通过测量信号到达不同接收点的时间差,来计算出信号源与接收点之间的距离差。
进而,利用三角定位或最小二乘法等数学方法,可以解算出信号源的具体位置。
二、TDOA算法的实现步骤部署接收点:在待定位区域内部署多个接收点,确保信号源发出的信号能够覆盖到所有接收点。
接收点的位置信息需要已知,并且要求接收点之间的相对位置关系精确。
测量时间差:当信号源发出信号时,各个接收点会同时开始计时。
当接收到信号时,记录信号到达的时间戳。
通过比较不同接收点之间的时间戳,可以得到信号到达各接收点的时间差。
计算距离差:根据信号传播速度和测量得到的时间差,可以计算出信号源与各个接收点之间的距离差。
定位计算:利用已知的接收点位置信息和计算得到的距离差,通过三角定位或最小二乘法等方法,解算出信号源的具体位置。
三、TDOA算法的关键技术同步技术:TDOA算法要求各个接收点之间的计时必须高度同步。
因此,需要采用精确的同步技术,如GPS授时、原子钟等,以确保各个接收点之间的时间差测量准确。
信号处理技术:在实际应用中,信号可能会受到多径效应、噪声干扰等因素的影响,导致时间差测量不准确。
因此,需要采用先进的信号处理技术,如滤波、去噪、波形识别等,以提高时间差测量的精度。
优化算法:为了提高定位精度和计算效率,需要采用优化算法对TDOA算法进行改进。