差分约束系统
- 格式:ppt
- 大小:548.00 KB
- 文档页数:29

mpcc模型预测控制原理MPCC模型预测控制原理概述模型预测控制(Model Predictive Control, MPC)是一种基于模型的控制策略,广泛应用于工业过程控制、机器人控制、交通流量控制等领域。
MPCC模型预测控制是MPC的一种改进形式,通过引入约束条件来优化系统的控制性能。
本文将介绍MPCC模型预测控制的原理、优势以及应用领域。
一、MPCC模型预测控制原理MPCC模型预测控制的基本原理是通过建立系统的数学模型,预测未来一段时间内的系统行为,并根据优化目标函数和约束条件确定最优控制输入。
其主要步骤包括以下几个方面:1. 建立系统模型:根据实际系统的特性,建立数学模型,通常采用离散时间状态空间模型或差分方程模型。
模型的准确性对于MPCC 的控制性能至关重要。
2. 预测未来状态:根据系统模型,使用当前状态和控制输入,预测未来一段时间内系统的状态。
这可以通过迭代计算系统模型的状态转移方程来实现。
3. 优化控制输入:通过优化目标函数和约束条件来确定最优控制输入。
目标函数通常包括系统的性能指标,如控制偏差的最小化、能耗的最小化等。
约束条件可以包括系统状态的约束、输入变量的约束等。
4. 执行控制输入:根据优化结果,执行最优控制输入。
在实际应用中,由于存在执行延迟和测量误差等因素,通常需要进行反馈校正,以实现精确的控制。
二、MPCC模型预测控制的优势MPCC模型预测控制相比传统的控制方法具有以下几个优势:1. 多变量控制能力:MPCC模型预测控制可以处理多变量系统,并考虑变量之间的相互影响,从而实现更精确的控制。
这在工业过程控制等领域尤为重要。
2. 鲁棒性:MPCC模型预测控制可以通过引入约束条件来确保系统在不确定性和扰动的情况下仍能保持稳定性。
这使得MPCC对于工业系统的鲁棒性要求更高。
3. 非线性控制能力:MPCC模型预测控制可以处理非线性系统,并通过在线优化来实现对非线性系统的精确控制。
这在机器人控制等领域尤为重要。
GPS原理及应用复习题目一.名词解释1二体问题:2真近点角、平近点角、偏近点角:3多路径效应:4无约束平差和约束平差5.章动6.异步观测7.接收机钟差8.周跳9.三维平差10.岁差11.同步观测12.卫星钟差13.整周未知数14.二维平差二.填空题1.GPS工作卫星的地面监控系统包括__________ 、__________ 、__________ 。
2.GPS系统由__________ 、__________ 、__________ 三大部分组成。
3.按照接收的载波频率,接收机可分为__________ 和__________接收机。
4.GPS卫星信号由、、三部分组成。
5.接收机由、、三部分组成。
6.GPS卫星信号中的测距码和数据码是通过技术调制到载波上的。
7. 1973年12月,GPS系统经美国国防部批准由陆海空三军联合研制。
自1974年以来其经历了、、三个阶段。
8.GPS 卫星星座基本参数为:卫星数目为、卫星轨道面个数为、卫星平均地面高度约20200公里、轨道倾角为度。
9.GPS定位成果属于坐标系,而实用的测量成果往往属于某国的国家或地方坐标系,为了实现两坐标系之间的转换,如果采用七参数模型,则该七个参数分别为,如果要进行不同大地坐标系之间的换算,除了上述七个参数之外还应增加反映两个关于地球椭球形状与大小的参数,它们是和。
10.真春分点随地球自转轴的变化而不断运动,其运动轨迹十分复杂,为了便于研究,一般将其运动分解为长周期变化的和短周期变化的。
11.GPS广播星历参数共有16个,其中包括1个,6个对应参考时刻的参数和9个反映参数。
12.GNSS的英文全称是。
13.载体的三个姿态角是、、。
14、GPS星座由颗卫星组成,分布在个不同的轨道上,轨道之间相距°,轨道的倾角是°,在地球表面的任何地方都可以看见至少颗卫星,卫星距地面的高度是km。
15、GPS使用L1和L2两个载波发射信号,L1载波的频率是MHZ,波长是cm,L2 载波的频率是MHZ,波长是cm。

安全级DCS算法组态图形——代码转换关键算法设计杨斐;韩文兴;黄俊;李晓龙【摘要】核电厂安全级DCS系统中,逻辑算法组态一般以图形的形式在工程师站完成,经过语言转换与交叉编译最终生成可执行文件下装到嵌入式设备中运行.本文分析了由图形语言转换为目标语言的过程,总结出其中如何快速、低耗获取组态对象关系和安全调度的关键问题,将其抽象为数学模型以图论的方法解决,基于图论基础理论完成由图形语言到计算机数据结构的转换,基于深度优先搜索算法与dijkstra 算法实现了图形形式的算法功能块间的快速寻径与安全调度.【期刊名称】《仪器仪表用户》【年(卷),期】2018(025)012【总页数】5页(P85-88,84)【关键词】图形语言;调度算法;图形代码转换【作者】杨斐;韩文兴;黄俊;李晓龙【作者单位】中国核动力研究设计院,成都610000;中国核动力研究设计院,成都610000;中国核动力研究设计院,成都610000;中国核动力研究设计院,成都610000【正文语种】中文【中图分类】TP311.10 引言算法软件是整个系统的核心部分,通过合理调度各种算法功能模块进行运算或比较,完成逻辑控制过程。
为了降低开发成本、缩短开发周期,一般经由工程师站使用图形界面方式开发完成逻辑算法组态[1],工程师站软件将图形语言最终转换为可执行代码,下载进嵌入式系统中运行。
本文研究由包含图形逻辑语言的.xml文件转换为可供交叉编译的.c文件的过程。
由于安全级DCS系统对可执行代码有极高的安全需求,故图形到目标代码的转换常采用经过IEC-61508标准验证的SCADE(Safety-Critical Application Development Environment,高安全性的应用程序开发环境)KCG软件,此软件为法国艾斯特尔公司根据航空DO-178B标准开发的图形组态代码转换软件,作为商业软件代码不开源有一定安全隐患。
安全级DCS领域国内已见基本的代码转换软件,基于翻译式功能模块与顺序调度,功能模块的设计在不同领域一般都遵守IEC-61131-3标准,具备通用性,已有的安全级DCS代码转换软件通过结果校验与语义纠错保证最终代码的安全,但在生成代码安全调度方面缺乏深入研究[2-4]。
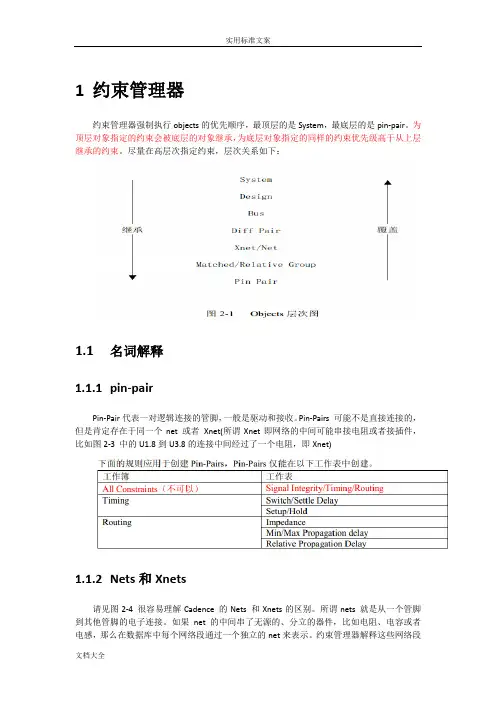
1约束管理器约束管理器强制执行objects的优先顺序,最顶层的是System,最底层的是pin-pair。
为顶层对象指定的约束会被底层的对象继承,为底层对象指定的同样的约束优先级高于从上层继承的约束。
尽量在高层次指定约束,层次关系如下:1.1名词解释1.1.1pin-pairPin-Pair代表一对逻辑连接的管脚,一般是驱动和接收。
Pin-Pairs 可能不是直接连接的,但是肯定存在于同一个net 或者Xnet(所谓Xnet即网络的中间可能串接电阻或者接插件,比如图2-3 中的U1.8到U3.8的连接中间经过了一个电阻,即Xnet)1.1.2Nets和Xnets请见图2-4 很容易理解Cadence 的Nets 和Xnets的区别。
所谓nets 就是从一个管脚到其他管脚的电子连接。
如果net 的中间串了无源的、分立的器件,比如电阻、电容或者电感,那么在数据库中每个网络段通过一个独立的net来表示。
约束管理器解释这些网络段作为相邻的扩展的网络或者Xnet,Xnets在多板连接的结构中也可以贯穿连接器和电缆。
可以将Nets 和Xnets与ECSets 联系起来。
1.1.3Match GroupsMatch Group 是nets,Xnets或者pin-pairs 的集合,此集合一定要都匹配(delay 或者length)或者相对于组的一个明确的目标。
如果delta 值没有定义,组的所有成员都将是绝对匹配的,并允许有一定的偏差。
如果定义了delta 值,那么组所有成员将相对匹配于明确的目标网络。
1.2在线检查设置首先在约束管理器中需要进行以下设置Analyze -> Analysis Modes这样在布线后,在相应的地方都会显示线长或约束相差值;如下图1.3示例通过一个实例来理解约束管理器U1看作是MCU,U2为DDR,ADDR0-3为地址线,需要作等长处理;CLK为时钟线,差分处理;U3,U4为连接同一个MCU的DDR;地址线是复用的,设置通过T型网络连接;需要作等长处理U5为DDR,DDR_DQ0-3为数据线,需要作等长处理1.3.1差分对约束即上图中的DDR_CLKP,DDR_CLKN设置Electrical -> Electrical Constraint Set -> Differential Pair在Object的Name下方Project右键Create -> Electrical CSet;并输入参数差分对约束参数主要有以下几个:Min line spacing:间距最小线距,若实际走线间距小于这个值,DRC就会出错。
GPS思考题及参考答案1.L1载波上没有P码信息。
(×)L1载波上有P码信息,用于捕获P码2.精密星历可以用于实时导航之中。
(×)精密星历是后处理星历,不能用于实时导航中3.WGS-84是一种协议坐标系。
(√)4.GPS相对定位中至少需要两台接收机。
(√)5.LADGPS是局部区域差分系统的简称。
(√)6.天球坐标系和地球坐标系无关,因此常用天球坐标系描述卫星的位置。
(√)7.从时间系统的实质来说,GPS时间系统是一种原子时。
(√)8.GPS载波相位观测值在接收机间求差可以消除接收机的钟差。
(×)GPS载波相位观测值在星站二次差分可以消除接收机的钟差。
9.在平面控制中,地方坐标系和WGS84存在着一定的关系,一般是先进行旋转后平移,实现两坐标的转换。
(×)在平面控制中,地方坐标系和WGS84存在着一定的关系,一般是先进行平移后旋转,实现两坐标的转换。
10、在观测中要求卫星高度角的目的主要是减弱电磁波在大气层传播的误差。
(√)11、地球自转轴长周期变化,引起黄道缓慢变化,称为岁差。
(√)12.升交点的赤径,轨道的倾角,唯一的确定了卫星轨道平面和地球体的相对定位。
(√)13.GPS中定位中获得的是大地高,可以直接纳入我国高程系统。
(×)GPS中定位中获得的是大地高,不可以直接纳入我国高程系统。
14.地球瞬时自转轴在天球上随时间而变,称极移。
(×)地球瞬时自转轴在地球上随时间而变,称极移。
15.GPS定位结果的转换可以在约束平差过程中实现。
(√)16.WGS84坐标系是一种理论坐标系。
(×)WGS84坐标系是一种协议坐标系。
17. 实时导航中可以使用精密星历。
(×)实时导航中使用广播星历。
18. GPS网平差是以野外原始观测数据值为基本观测量。
(×)GPS网平差是以基线解算后获得的基线向量为基本观测量。
19.不同的坐标系之间一般存在着平移和旋转关系。
1约束管理器约束管理器强制执行objects的优先顺序,最顶层的是System,最底层的是pin-pair。
为顶层对象指定的约束会被底层的对象继承,为底层对象指定的同样的约束优先级高于从上层继承的约束。
尽量在高层次指定约束,层次关系如下:1.1名词解释1.1.1pin-pairPin-Pair代表一对逻辑连接的管脚,一般是驱动和接收。
Pin-Pairs 可能不是直接连接的,但是肯定存在于同一个net 或者Xnet(所谓Xnet即网络的中间可能串接电阻或者接插件,比如图2-3 中的U1.8到U3.8的连接中间经过了一个电阻,即Xnet)1.1.2Nets和Xnets请见图2-4 很容易理解Cadence 的Nets 和Xnets的区别。
所谓nets 就是从一个管脚到其他管脚的电子连接。
如果net 的中间串了无源的、分立的器件,比如电阻、电容或者电感,那么在数据库中每个网络段通过一个独立的net来表示。
约束管理器解释这些网络段作为相邻的扩展的网络或者Xnet,Xnets在多板连接的结构中也可以贯穿连接器和电缆。
可以将Nets 和Xnets与ECSets 联系起来。
1.1.3Match GroupsMatch Group 是nets,Xnets或者pin-pairs 的集合,此集合一定要都匹配(delay 或者length)或者相对于组内的一个明确的目标。
如果delta 值没有定义,组内的所有成员都将是绝对匹配的,并允许有一定的偏差。
如果定义了delta 值,那么组内所有成员将相对匹配于明确的目标网络。
1.2在线检查设置首先在约束管理器中需要进行以下设置Analyze -> Analysis Modes这样在布线后,在相应的地方都会显示线长或约束相差值;如下图1.3示例通过一个实例来理解约束管理器U1看作是MCU,U2为DDR,ADDR0-3为地址线,需要作等长处理;CLK为时钟线,差分处理;U3,U4为连接同一个MCU的DDR;地址线是复用的,设置通过T型网络连接;需要作等长处理U5为DDR,DDR_DQ0-3为数据线,需要作等长处理1.3.1差分对约束即上图中的DDR_CLKP,DDR_CLKN设置Electrical -> Electrical Constraint Set -> Differential Pair在Object的Name下方Project右键Create -> Electrical CSet;并输入参数差分对约束参数主要有以下几个:Min line spacing:内间距最小线距,若实际走线内间距小于这个值,DRC就会出错。
第45卷第2期 20l1年6月 华中师范大学学报(自然科学版) J0URNAI 0F HUA2:H0NG NORMAL UNIVERSITY(Nat.Sci.) Vo1.45 No.2
Jun.2011
文章编号:1000—1 190(2011)02—0223 04
协同差分进化算法求解负荷经济分配I闭题
雷建军 ,李 剑 (湖北第二师范学院计算机学院,武汉430205)
摘要:提出了一种协同差分进化算法求解电力系统负荷经济分配问题(Economic Dispatching, ED).该算法考虑了机组的爬坡约束、出力限制区约束等非光滑费用函数曲线这样的非线性特征, 并根据ED中可行域被分割为多个独立的区域的特点,采用协同进化策略处理约束条件.将种群分 为保守和激进两种策略的子种群,子种群最优个体分别对另一个子种群中部分个体进行吞并和更 新,以引导算法搜索新可行域.算法应用于一个6台机组的算例,与遗传算法、微粒群算法和标准 差分进化算法相比较,本文算法结果质量更好并且更稳定,是求解负荷经济分配问题的一种有效 方法. 关键词:协同进化算法;负荷经济分配;电力系统;差分进化 中图分类号:04l5 文献标识码:A
负荷经济分配(Economic Dispatch,ED)问题 是机组组合问题的1个子优化问题.ED 题指的 是,在满足各种约束条件下,分配运行机组间的负 荷,并且使得电力系统总运行费用最小或发电公司 的利润最大.而随着电力市场改革的推进,电力系 统的运营机构一方面希望系统运行于能获得最大 收益的状态,即最优化目标函数值;另一方面又需 要保证系统的稳定性和安全性,即满足所有的约束 条件.因此如何在由ED问题中大量的不连续、不 可微、非线性和离散的约束条件限制的狭窄且复 杂,甚至不连续的可行域内搜索问题的最优解,以 同时兼顾收益与安全两个目标成为亟待解决的问 题.为了求解ED问题的标准方法有入迭代法,梯 度法和等微增率法等,这些方法假设机组的增量负 荷特性是单调上升和分段线性的,这限制了 其在求 解非线性特性的机组中的应用¨】].因此基于智能计 算的全局优化技术,例如:遗传算法(Genetic Algo— rithm,GA)和微粒群算法(Particle Swarm Opti— mization,PSO)等在近年来被用于求解ED问题并 取得一定成果l1 ]. 差分进化算法(Differential Evolution,DE)是一 种相对较新的基于群体智能(Swarm Intelligent,SI) 的随机搜索进化算法,并受到许多学者的关注|_4 .研 究成果已经证实,它具有收敛速度快、鲁棒性好以及 实现简单等优点,然而如何根据具体问题合理处理 复杂的约束条件依然是难点.针对ED问题中可行 域被约束条件分割为多个独立的区域的特点,本文 将协同进化(Co-evolutionary)的机制引入DE,得到 协同进化差分进化算法(Co-evolutionary Differential Evolution,Co—DE).通过对于拥有6个机组的一个 实际系统的仿真计算,结果证实本文算法优于遗传 算法、传统微粒群算法和差分进化算法.