雷达信号处理基本流程
- 格式:docx
- 大小:242.55 KB
- 文档页数:22
相控阵雷达接收处理流程English Answer:Phased Array Radar Receiving and Processing Procedure.1. Signal Reception: The phased array radar antenna receives electromagnetic signals reflected from targets. These signals are then amplified and downconverted to an intermediate frequency (IF).2. Analog-to-Digital Conversion: The IF signals are digitized using an analog-to-digital converter (ADC). This process converts the continuous-time analog signals into discrete-time digital signals.3. Beamforming: The digital signals are processed to form multiple beams in different directions. This is achieved by applying appropriate phase shifts and weighting to the signals from each antenna element.4. Matched Filtering: The received signals are correlated with known target waveforms to detect and enhance target echoes. This process is known as matched filtering and helps to improve the signal-to-noise ratio (SNR).5. Pulse Compression: The received signals are compressed in time to increase the range resolution of the radar. This is achieved by using a variety of techniques, such as linear frequency modulation (LFM) or phase-coded waveforms.6. Range and Doppler Processing: The compressed signals are processed to extract target range and velocity information. This is done by performing range-Doppler processing, which involves applying Fast Fourier Transforms (FFTs) to the signals.7. Target Detection and Tracking: The processed signals are analyzed to detect and track targets. This involves identifying target echoes, estimating target parameters, and maintaining track files for each target.8. Data Fusion and Output Processing: The target information from the radar is fused with data from other sensors, such as electronic warfare systems or navigation systems. The fused data is then processed to generate a comprehensive view of the surrounding environment.中文回答:相控阵雷达接收处理流程。
激光雷达的工作原理与信号处理激光雷达(Light Detection and Ranging,简称LiDAR)是一种利用激光束探测目标并测量其距离、速度和方向等信息的技术。
它在自动驾驶、环境监测、地图绘制等领域得到广泛应用。
本文将探讨激光雷达的工作原理以及信号处理方面的内容。
一、激光雷达的工作原理激光雷达通过发射一束窄束激光,然后测量激光束被目标物体反射后返回的时间和强度,从而实现测量目标物体的距离和形状等信息。
其工作原理可以分为激光发射、目标反射和激光接收三个过程。
1. 激光发射:激光雷达通过激光发射器发射一束激光束。
一般而言,激光雷达会采用红外激光作为发射光源,因为红外激光有较好的穿透能力和抗干扰性。
2. 目标反射:激光束照射到目标物体上后,会被目标反射回来。
目标物体的形状、颜色和表面材质等因素会影响激光的反射情况。
3. 激光接收:激光雷达接收到目标反射回来的激光束,并通过接收器将激光信号转换为电信号进行处理。
接收器通常包括光电二极管和放大器等组件,用于接收和放大反射信号。
二、激光雷达信号处理激光雷达通过对接收到的激光信号进行处理,可以获得目标物体的距离、速度和方向等信息。
信号处理在激光雷达系统中起着重要的作用,是激光雷达工作的关键环节。
1. 距离测量:利用激光束的发射和接收时间差,可以计算出目标物体与激光雷达之间的距离。
一般来说,激光雷达系统会使用飞行时间(Time of Flight)或相位差测量法(Phase Shift)来实现精确的距离测量。
2. 速度测量:通过分析接收到的激光信号的频率变化,可以获得目标物体的速度信息。
激光雷达通常采用多普勒效应来实现速度测量,即利用光频移变化进行速度测量。
3. 方向测量:利用激光雷达的扫描方式,即通过旋转或扫描来覆盖整个空间,可以获得目标物体的方向信息。
通常情况下,激光雷达会采用机械扫描或电子扫描的方式进行方向测量。
4. 数据处理:激光雷达系统会通过采样和数字信号处理技术对接收到的激光信号进行滤波、去噪和数据分析等处理。
雷达系统中的信号处理技术摘要本文介绍了雷达系统及雷达系统信号处理的主要内容,着重介绍与分析了雷达系统信号处理的正交采样、脉冲压缩、MTD和恒虚警检测几种现代雷达技术,雷达系统通过脉冲压缩解决解决雷达作用距离和距离分辨力之间的矛盾,通过MTD来探测动目标,通过恒虚警〔CFAR〕来实现整个系统对目标的检测。
关键词雷达系统正交采样脉冲压缩MTD 恒虚警检测1雷达系统概述雷达是Radar〔Radio Detection And Ranging〕的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
雷达的任务就是测量目标的距离、方位和仰角,还包括目标的速度,以及从目标回波中获取更多有关目标的信息。
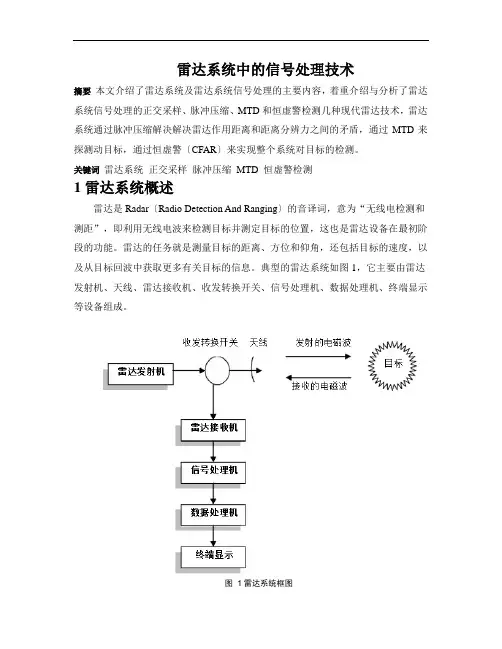
典型的雷达系统如图1,它主要由雷达发射机、天线、雷达接收机、收发转换开关、信号处理机、数据处理机、终端显示等设备组成。
图1雷达系统框图随着现代电子技术的不断发展,特别是数字信号处理技术、超大规模集成数字电路技术、电脑技术和通信技术的告诉发展,现代雷达信号处理技术正在向着算法更先进、更快速、处理容量更大和算法硬件化方向飞速发展,可以对目标回波与各种干扰、噪声的混叠信号进行有效的加工处理,最大程度低剔除无用信号,而且在一定的条件下,保证以最大发现概率发现目标和提取目标的有用信息。
雷达发射机产生符合要求的雷达波形,然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由雷达接收机接收,然后对雷达回波信号依次进行信号处理、数据处理,就可以获知目标的相关信息。
雷达信号处理的流程如下:图 2 雷达信号处理流程2雷达信号处理的主要内容雷达信号处理是雷达系统的主要组成部分。
信号处理消除不需要的杂波,通过所需要的目标信号,并提取目标信息。
内容包括雷达信号处理的几个主要部分:正交采样、脉冲压缩、MTD和恒虚警检测。
正交采样是信号处理的第一步,担负着为后续处理提供高质量数据的任务。

高分三号雷达卫星数据预处理流程1.首先,我们需要导入高分三号雷达卫星数据。
First, we need to import the data from the GF-3 radar satellite.2.然后,对数据进行质量控制,包括去除异常值和填补缺失值。
Then, perform quality control on the data, including removing outliers and filling in missing values.3.接下来,对数据进行预处理,如去噪、辐射校正和地理坐标转换。
Next, preprocess the data, such as denoising, radiometric correction, and georeferencing.4.在数据预处理过程中,需要考虑雷达影像的波长和极化特性。
Consider the wavelength and polarization characteristics of the radar images during data preprocessing.5.对数据进行辐射定标,确保数据在不同时间和地点具有一致的无量纲化单位。
Radiometric calibration of the data is performed toensure consistent dimensionless units at different times and locations.6.在地理坐标转换时,需要将雷达影像数据投影到统一的坐标系中。
During georeferencing, the radar image data needs to be projected onto a unified coordinate system.7.数据的辐射校正有助于减小不同时间和天气条件下影像的差异。
Radiometric correction of the data helps reducedifferences in images under different times and weather conditions.8.在预处理过程中,还需要考虑雷达影像的分辨率和几何精度。
激光雷达工作流程激光雷达是一种通过发射激光束并测量其返回时间来获取目标位置和距离的远距离感测技术。
它在自动驾驶、机器人导航、环境监测等领域发挥着重要的作用。
下面将介绍激光雷达的工作流程。
1. 发射激光束激光雷达首先通过激光发射器发射一束激光束。
这个激光束具有特定的频率和波长,能够在目标物体上发生反射。
2. 接收反射信号激光束照射到目标物体上后,会发生反射。
激光雷达的接收器会接收到这些反射信号,并记录下接收到信号的时间。
3. 计算时间差激光雷达通过计算激光束发射和接收之间的时间差来确定目标物体的距离。
利用光速已知的特性,通过测量发射和接收的时间差,可以计算出目标物体距离激光雷达的距离。
4. 构建点云图激光雷达会根据接收到的反射信号的时间差和距离计算结果,构建出一个点云图。
点云图是由大量的点组成的,每个点代表一个目标物体的位置。
这些点的坐标可以表示目标物体在三维空间中的位置。
5. 数据处理与滤波激光雷达会对接收到的点云数据进行处理和滤波,以去除噪声和无效数据。
常见的数据处理和滤波方法包括平滑滤波、体素滤波、聚类分割等,可以提高激光雷达的测量精度和可靠性。
6. 目标检测与识别在得到滤波后的点云数据后,激光雷达会进行目标检测与识别。
通过分析点云图中的目标物体的形状、大小和运动特征,可以对不同类型的目标进行分类和识别。
7. 地图生成与定位激光雷达还可以用于地图的生成与定位。
通过扫描周围环境并获取大量的点云数据,激光雷达可以生成一个高精度的三维地图。
同时,激光雷达可以通过与已知地图进行匹配,实现自身在地图中的定位。
8. 障碍物避障与路径规划激光雷达的数据可以用于障碍物避障与路径规划。
根据激光雷达获取到的障碍物信息,自动驾驶系统可以进行路径规划,避开障碍物,确保行驶的安全性。
9. 实时更新与反馈激光雷达可以实时地更新点云图和地图,并不断向自动驾驶系统提供最新的环境信息。
同时,激光雷达也可以向驾驶员或系统提供实时的反馈,帮助驾驶员做出正确的决策。
基本雷达信号处理流程一、脉冲压缩窄带(或某些中等带宽)的匹配滤波:相关处理,用FFT数字化执行,即快速卷积处理,可以在基带实现(脉冲压缩)快速卷积,频域的匹配滤波脉宽越小,带宽越宽,距离分辨率越高;脉宽越大,带宽越窄,雷达能量越小,探测距离越近;D=BT(时宽带宽积);脉压流程:频域:回波谱和参考函数共轭相乘时域:相关即输入信号的FFT乘上参考信号FFT的共轭再逆FFT;Sc=ifft(fft(Sb).*conj(fft(S)));Task1f0=10e9;%载频tp=10e-6;%脉冲宽度B=10e6;%信号带宽fs=100e6;%采样率R0=3000;%目标初始距离N=4096;c=3e8;tau=2*R0/c;beita=B/tp;t=(0:N-1)/fs;Sb=rectpuls(t-tp/2-tau,tp).*exp(j*pi*beita*(t-tp/2-tau).^2).*exp(-2j*pi*f0*tau);%回波信号S=rectpuls(t-tp/2,tp).*exp(i*pi*beita*(t-tp/2).^2);%发射信号(参考信号)x 10x 10x 10So=ifft(fft(Sb).*conj(fft(S)));%脉压 figure(7);plot(t*c/2,db(abs(So)/max(So)))%归一化dB grid on-400-350-300-250-200-150-100-500二、去斜处理(宽带的匹配滤波)去斜处理“有源相关”,通常用来处理极大带宽的LFM 波形(如果直接采样的话因为频带很宽所以在高频的时候需要的采样率就很大,采样点数就很多,所以要经过去斜处理)Stretch方法是针对线性调频信号而提出的,其方法是将输入信号与参考信号(经适当延迟的本振信号,延迟量通常由窄带信号测距结果估计出)混频,则每一个散射点就对应一个混频后的单频分量,对混频输出的信号进行DFT处理,即可获得目标的距离像,对参考信号的要求是应具有与输入信号相同的调频斜率。
基本雷达信号处理流程一、脉冲压缩窄带(或某些中等带宽)的匹配滤波:相关处理,用FFT数字化执行,即快速卷积处理,可以在基带实现(脉冲压缩)快速卷积,频域的匹配滤波脉宽越小,带宽越宽,距离分辨率越高;脉宽越大,带宽越窄,雷达能量越小,探测距离越近;D=BT(时宽带宽积);脉压流程:频域:回波谱和参考函数共轭相乘时域:相关即输入信号的FFT乘上参考信号FFT的共轭再逆FFT;Sc=ifft(fft(Sb).*conj(fft(S)));Task1f0=10e9;%载频tp=10e-6;%脉冲宽度B=10e6;%信号带宽fs=100e6;%采样率R0=3000;%目标初始距离N=4096;c=3e8;tau=2*R0/c;beita=B/tp;t=(0:N-1)/fs;Sb=rectpuls(t-tp/2-tau,tp).*exp(j*pi*beita*(t-tp/2-tau).^2).*exp(-2j*pi*f0*tau);%回波信号S=rectpuls(t-tp/2,tp).*exp(i*pi*beita*(t-tp/2).^2);%发射信号(参考信号)So=ifft(fft(Sb).*conj(fft(S)));%脉压figure(7);plot(t*c/2,db(abs(So)/max(So)))%归一化dBgrid on二、去斜处理(宽带的匹配滤波)去斜处理“有源相关”,通常用来处理极大带宽的LFM波形(如果直接采样的话因为频带很宽所以在高频的时候需要的采样率就很大,采样点数就很多,所以要经过去斜处理)Stretch方法是针对线性调频信号而提出的,其方法是将输入信号与参考信号(经适当延迟的本振信号,延迟量通常由窄带信号测距结果估计出)混频,则每一个散射点就对应一个混频后的单频分量,对混频输出的信号进行DFT处理,即可获得目标的距离像,对参考信号的要求是应具有与输入信号相同的调频斜率。
去斜处理流程:混频过程为回波信号在时域与参考信号的共轭相乘混频后得到一个瞬时频率和目标距离成正比的单频信号,对其进行频谱分析即可得到目标的距离像;去斜处理一般情况下可降低信号带宽;%%%%%%%%%%%%%%%%%%%%%%%%去斜处理仿真程序%%%%%%%%%%%%%%%%%%%%%%%%%clc;clear all;close all;B=10e6;%带宽10MHztp=10e-6;%脉宽10usk=B/tp;%LFM系数fs=50e6;R0=3e3;R1=2000;R2=3500;R=5000;c=3e8;f0=60e6;N=round(2*R/c*fs);fft_N=2^nextpow2(N);t=linspace(0,2*R/c,N);%%%%%%%%%%%%%%%%%%%%%%%%%%参考信号%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Sref=exp(2i*pi*f0*t).*exp(1i*pi*k*t.^2); %%%%%%%%%%%%%%%%%%%%%%%%%%%回波信号%%%%%%%%%%%%%%%%%%%%%%%%%%%%Sb0=exp(1j*pi*k*(t-2*R0/c).^2).*exp(2j*pi*f0*(t-2*R0/c));Sb1=exp(1j*pi*k*(t-2*R1/c).^2).*exp(2j*pi*f0*(t-2*R1/c));Sb2=exp(1j*pi*k*(t-2*R2/c).^2).*exp(2j*pi*f0*(t-2*R2/c));Sb=Sb0+Sb1+Sb2;%%%%%%%%%%%%%%%%%%%%%%%%%%%混频信号%%%%%%%%%%%%%%%%%%%%%%%%%%%%SSb=Sref.*conj(Sb);%去斜后时域信号spectrum=fft(SSb,fft_N);%去斜后频域信号f=fs*(0:fft_N-1)/fft_N-fs/2;%从-fs/2到fs/2f=f*c*tp/2/B;%瞬时频率对应的距离sf=exp(-j*pi/k*f.^2);%滤波器传输函数SSb=spectrum.*sf;%从频域去距离扭曲,实现了压缩和去RVPfigure;SSb=fftshift(SSb);SSb1=ifft(SSb);%消除了距离扭曲和RVP的时域信号subplot(211);plot(f,db(abs(SSb)/max(SSb)))xlabel('距离/m');grid onsubplot(212);plot(f,abs(SSb))xlabel('距离/m');grid on三、加窗信号的截取产生了能量泄漏,而用FFT算法计算频谱又产生了栅栏效应,在FFT分析中为了减少或消除频谱能量泄漏及栅栏效应可采用不同的截取函数对信号进行截短,截短函数称为窗函数,简称窗。
雷达信号处理和数据处理技术作者:陈丽芳来源:《智富时代》2018年第01期【摘要】雷达技术对人类探索未知领域有着重要的作用,虽然雷达在军事方面的应用相较与民用和研究用所占比重极大,但是随着雷达技术的发展和人类社会的进步,最终雷达技术会更多的应用于人们生活。
本文结合实际对雷达的信号处理和数据处理的技术进行介绍分析,总结对雷达技术的现实应用。
【关键词】雷达;信号处理;数据处理随着现代科技的发展,人类不断涉及未知领域,对未知领域进行积极的科学探索,雷达作为一种基础的科研探测装置而被广泛应用,无论是海陆空还是离开地球的太空探测,都可以用雷达进行数据的探测与收集。
通过雷达获得信息准确性高,但是怎样将雷达获得的信息转化为我们进行研究的数字或其他数据形式,这便是本文的主题。
一、雷达技术的具体解释说明雷达技术实际上是对电磁波的应用,利用不同频率段的电磁波对物体进行发射,与物体接触后反射回馈至发射源,通过对时间或得到的其他反馈进行处理得到所需数据。
雷达发射的电磁波可因实际需要进行高低频率的调整。
因电磁波传播的特殊性,使其可在任何介质中进行传播,并且具有操作简单、数据准确性精确性高,在各个领域都有广泛应用,无论是生活、科研还是军事领域。
二、雷达信号接受及处理的基础技术雷达技术得到推广后,雷达的信号处理技术也在不断发展,通过信号的处理能够实现对物体间的距离,物体的角度,形状以及运动物体的速度等性质进行探测。
雷达信号处理技术有波形和干扰抑制技术,脉冲压缩和信号相参积累技术,阵列信号处理技术,目标检测技术,目标特征信息提取和识别技术,信号处理系统设计技术等。
(一)雷达信号处理的流程分析雷达信号的处理的基本流程为:电磁波发射,电磁波信号反馈,现象体现,信号调节,信号成像,信号的自动检测,信号跟踪,信号目标的识别。
其中信号调节部分可细分为接收机信号变换,电磁信号波的形成,电磁脉冲压缩,电磁波的杂波清理(信号清晰化),多普勒处理。
雷达信号处理中的角度计算雷达是一种用于探测目标位置和速度的电子设备。
雷达系统通过发射电磁波,接收反射回来的信号,从而确定目标的位置和速度。
在雷达系统中,角度计算是非常重要的一个环节。
角度计算是指通过雷达接收到的信号,计算出目标在空间中的方位角和仰角。
本文将介绍雷达信号处理中的角度计算方法。
1. 雷达信号处理流程雷达信号处理是指将雷达接收到的信号进行处理,从中提取有用的信息。
雷达信号处理包括以下几个步骤:(1) 预处理:对接收到的雷达信号进行滤波、放大等处理,以提高信噪比和增强信号。
(2) 目标检测:通过对预处理后的信号进行阈值判定,确定目标是否存在。
(3) 目标跟踪:确定目标的位置和速度,并将其与之前的目标进行匹配,从而实现目标跟踪。
(4) 角度计算:通过目标跟踪得到的目标位置和速度信息,计算出目标在空间中的方位角和仰角。
2. 角度计算方法角度计算是雷达信号处理中的一个重要环节。
目标在空间中的方位角和仰角是雷达系统确定目标位置的重要参数。
下面将介绍几种常用的角度计算方法。
(1) 滤波法滤波法是一种常用的角度计算方法。
该方法通过对雷达接收到的信号进行滤波,去除干扰信号,从而实现目标信号的提取。
然后根据目标信号的时延差,计算出目标在空间中的方位角和仰角。
滤波法的优点是简单易行,但是对于强干扰的情况下,滤波法的效果不佳。
(2) 相位差法相位差法是一种利用雷达接收到的信号的相位信息进行角度计算的方法。
该方法通过计算两个接收天线之间的相位差,从而确定目标在空间中的方位角和仰角。
相位差法的优点是精度高,但是需要使用多个天线进行测量,成本较高。
(3) 多普勒频移法多普勒频移法是一种利用雷达接收到的信号的多普勒频移信息进行角度计算的方法。
该方法通过测量目标反射回来的信号的多普勒频移,从而确定目标在空间中的方位角和仰角。
多普勒频移法的优点是适用于高速运动的目标,但是对于低速运动的目标,精度较低。
(4) 高斯拟合法高斯拟合法是一种利用雷达接收到的信号的幅度信息进行角度计算的方法。
雷达信号检测流程全文共四篇示例,供读者参考第一篇示例:雷达信号检测是一项重要的技术,用于检测和跟踪目标物体的位置和运动。
它在军事、安全、气象等领域都有广泛的应用。
雷达信号检测流程是指整个雷达系统中的信号检测部分的工作过程,其核心是信号处理和目标检测。
雷达信号检测流程的第一步是接收雷达发射的信号。
雷达发射器将电磁波通过天线发射出去,这些电磁波会与目标物体相互作用,一部分电磁波会被目标物体反射返回,被接收天线接收。
接收天线将接收到的电磁波信号转换成电信号,送入雷达接收机。
接收机的作用是放大和滤波接收到的信号,使之能够被后续的处理部分处理。
在放大和滤波的过程中,会去除干扰信号和杂波,只保留目标信号。
接收机将处理好的信号送入雷达信号处理部分。
雷达信号处理是整个雷达信号检测流程的核心部分,其主要任务是从接收到的信号中提取出目标的信息。
雷达信号处理包括目标检测、信号分析、信号处理和数据处理等步骤。
目标检测是指通过对接收到的信号进行分析,确定是否存在目标物体。
在雷达信号处理中,经常采用自适应滤波器、相关器及其它处理方法来提高目标检测性能。
信号分析是指对信号进行时域分析和频域分析,以分析目标的运动特性和形状特征。
信号处理是指对信号进行滤波、匹配滤波、降噪等处理,以提取目标的特征和参数。
数据处理是指对处理后的信号进行整合和分析,得出目标的位置、速度和轨迹等信息。
雷达信号检测流程的最后一步是目标跟踪。
目标跟踪是指通过对雷达目标信号的监测和分析,实时跟踪目标的位置和运动情况。
目标跟踪在雷达系统中具有重要意义,可以在一定程度上保证雷达系统的准确性和可靠性。
目标跟踪是通过对目标信号的特征提取、目标运动预测和目标轨迹跟踪等步骤来实现的。
雷达信号检测流程是一个复杂的系统工程,在实际应用中需要对雷达系统进行综合设计和优化。
通过不断地改进和提升雷达信号检测流程,可以提高雷达系统的性能和可靠性,更好地满足各种应用需求。
希望通过本文的介绍,读者能够对雷达信号检测流程有更深入的了解,为相关领域的研究和应用提供参考。
基本雷达信号处理流程一、脉冲压缩窄带(或某些中等带宽)的匹配滤波:相关处理,用FFT数字化执行,即快速卷积处理,可以在基带实现(脉冲压缩)快速卷积,频域的匹配滤波脉宽越小,带宽越宽,距离分辨率越高;脉宽越大,带宽越窄,雷达能量越小,探测距离越近;D=BT(时宽带宽积);脉压流程:频域:回波谱和参考函数共轭相乘时域:相关即输入信号的FFT乘上参考信号FFT的共轭再逆FFT;Sc=ifft(fft(Sb).*conj(fft(S)));Task1f0=10e9;%载频tp=10e-6;%脉冲宽度B=10e6;%信号带宽fs=100e6;%采样率R0=3000;%目标初始距离N=4096;c=3e8;tau=2*R0/c;beita=B/tp;t=(0:N-1)/fs;Sb=rectpuls(t-tp/2-tau,tp).*exp(j*pi*beita*(t-tp/2-tau).^2).*exp(-2j* pi*f0*tau);%回波信号S=rectpuls(t-tp/2,tp).*exp(i*pi*beita*(t-tp/2).^2);%发射信号(参考信号)x 10x 10x 10So=ifft(fft(Sb).*conj(fft(S)));%脉压 figure(7);plot(t*c/2,db(abs(So)/max(So)))%归一化dB grid on-400-350-300-250-200-150-100-500二、去斜处理(宽带的匹配滤波)去斜处理“有源相关”,通常用来处理极大带宽的LFM波形(如果直接采样的话因为频带很宽所以在高频的时候需要的采样率就很大,采样点数就很多,所以要经过去斜处理)Stretch方法是针对线性调频信号而提出的,其方法是将输入信号与参考信号(经适当延迟的本振信号,延迟量通常由窄带信号测距结果估计出)混频,则每一个散射点就对应一个混频后的单频分量,对混频输出的信号进行DFT处理,即可获得目标的距离像,对参考信号的要求是应具有与输入信号相同的调频斜率。
去斜处理流程:输入信号输出信号参考信号混频过程为回波信号在时域与参考信号的共轭相乘混频后得到一个瞬时频率和目标距离成正比的单频信号,对其进行频谱分析即可得到目标的距离像;去斜处理一般情况下可降低信号带宽;%%%%%%%%%%%%%%%%%%%%%%%% 去斜处理仿真程序 %%%%%%%%%%%%%%%%%%%%%%%%% clc;clear all;close all;B=10e6;%带宽10MHztp=10e-6;%脉宽10usk=B/tp;%LFM系数fs=50e6;R0=3e3;R1=2000;R2=3500;R=5000;c=3e8;f0=60e6;N=round(2*R/c*fs);fft_N=2^nextpow2(N);t=linspace(0,2*R/c,N);%%%%%%%%%%%%%%%%%%%%%%%%%% 参考信号 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Sref=exp(2i*pi*f0*t).*exp(1i*pi*k*t.^2);0.511.522.533.5x 10-5-101仿真时间/t 幅度参考信号实部0.511.522.533.5x 10-5-101仿真时间/t 幅度参考信号虚部-2.5-2-1.5-1-0.500.511.522.5x 107050100频率f/Hz幅度参考信号频谱%%%%%%%%%%%%%%%%%%%%%%%%%%% 回波信号 %%%%%%%%%%%%%%%%%%%%%%%%%%%% Sb0=exp(1j*pi*k*(t-2*R0/c).^2).*exp(2j*pi*f0*(t-2*R0/c)); Sb1=exp(1j*pi*k*(t-2*R1/c).^2).*exp(2j*pi*f0*(t-2*R1/c)); Sb2=exp(1j*pi*k*(t-2*R2/c).^2).*exp(2j*pi*f0*(t-2*R2/c)); Sb=Sb0+Sb1+Sb2;x 10-5-101仿真时间t/s 幅度回波信号1实部x 10-5-101仿真时间t/s 幅度回波信号2实部x 10-5-101仿真时间t/s幅度回波信号3实部x 10-5-3-2-1123时间 t/s幅度%%%%%%%%%%%%%%%%%%%%%%%%%%% 混频信号 %%%%%%%%%%%%%%%%%%%%%%%%%%%% SSb=Sref.*conj(Sb);%去斜后时域信号 spectrum=fft(SSb,fft_N);%去斜后频域信号 f=fs*(0:fft_N-1)/fft_N-fs/2;%从-fs/2到fs/2 f=f*c*tp/2/B;%瞬时频率对应的距离 sf=exp(-j*pi/k*f.^2);%滤波器传输函数SSb=spectrum.*sf;%从频域去距离扭曲,实现了压缩和去RVP figure;SSb=fftshift(SSb);SSb1=ifft(SSb);%消除了距离扭曲和RVP 的时域信号 subplot(211);plot(f,db(abs(SSb)/max(SSb))) xlabel('距离/m'); grid on subplot(212); plot(f,abs(SSb)) xlabel('距离/m'); grid on-80-60-40-200距离/m0500100015002000距离/m三、加窗信号的截取产生了能量泄漏,而用FFT 算法计算频谱又产生了栅栏效应,在FFT 分析中为了减少或消除频谱能量泄漏及栅栏效应可采用不同的截取函数对信号进行截短,截短函数称为窗函数,简称窗。
%%%%%%%%%%%%%%%%%%%%%%%% 窄带加窗处理 %%%%%%%%%%%%%%%%%%%%%%%%clc;clear all ;close all ;f0=10e9;%载频 B=10e6;%信号带宽 tp=10e-6;%脉冲宽度 fs=100e6;%采样频率 k=B/tp;%LFM 系数,线性调频率 R0=3000;%初始距离c=3e8;%光速 R=6000; tau=2*R0/c; N=round(2*R/c*fs); fft_N=2^nextpow2(N); t=(0:fft_N-1)/fs;s=rectpuls(t-tp/2,tp).*exp(j*pi*k*(t-tp/2).^2); %% 发射信号 spectrum_s=fft(s,fft_N);%参考信号频谱 spectrum_s=fftshift(spectrum_s);sb=rectpuls(t-tp/2-tau,tp).*exp(j*pi*k*(t-tp/2-tau).^2).*exp(-2j*pi*f 0*tau); %% 回波信号 %% 时域加窗sm=hamming(round(tp*fs))'.*s(1:round(tp*fs));%参考信号加窗 %% 频域加窗%找频谱的-4dB 压缩点,窗函数严格与该压缩点之间的频谱对应hamming1=[zeros(1855,1)',hamming(387)',zeros(1854,1)']; spectrum_sm=hamming1.*spectrum_s; %% 脉压fft_ssb=ifft(fft(sb).*conj(fft(s)));fft_smsb=ifft(fft(sb).*conj(fft(sm,length(sb)))); fft_spsb=ifft(fft(sb).*conj(fftshift(spectrum_sm)));x 107-90-80-70-60-50-40-30-20-100频率 f/Hz幅度 /d B50100150幅度x 1050100150频率 f/Hz幅度x 10750100150频率 f/Hz幅度x 10750100150频率 f/Hz幅度-400-350-300-250-200-150-100-500距离 /m幅度 /d b-400-350-300-250-200-150-100-500距离 /m幅度 /d b窄带频域加窗与否对比图%%%%%%%%%%%%%%%%%%%%%%%%%%% 去斜加窗处理 %%%%%%%%%%%%%%%%%%%%%%%%%%%% B=10e6;%带宽10MHz tp=10e-6;%脉宽10us u=B/tp;%LFM 系数 fs=50e6;%fs>=2*B/tp*tau R0=3000;%初始距离 R=4500;%距离波门 c=3e8; f0=60e6;%载频N=round(2*R/c*fs); fft_N=2^nextpow2(N); t=linspace(0,2*R/c,N); f=fs*(0:fft_N-1)/fft_N-fs/2;%从-fs/2到fs/2%%%%%%%%%%%%%%%%%%%%%%%%%% 参考信号 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Sref=exp(1i*pi*u*t.^2);%%%%%%%%%%%%%%%%%%%%%%%%%%%% 回波信号 %%%%%%%%%%%%%%%%%%%%%%%%%%%% Sb=rectpuls(t-2*R0/c,tp).*exp(1j*pi*u*(t-2*R0/c).^2);%%%%%%%%%%%%%%%%%%%%%%%%%%%% 混频信号 %%%%%%%%%%%%%%%%%%%%%%%%%%%% ssb=Sref.*conj(Sb); %% 加窗% w = hamming(502)';% hamming=[zeros(749,1)',w-min(w),zeros(249,1)']; % hamming=abs(hamming)/max(hamming);hamming=[zeros(749,1)',hamming(502)',zeros(249,1)']; ssb0=hamming.*ssb;spectrum_ssb0=fft(ssb0,fft_N); %一维距离像 spectrum_ssb=fft(ssb,fft_N); f=f*c*tp/2/B;%瞬时频率对应的距离figure; %%图6plot(f,db(abs(fftshift(spectrum_ssb))/max(fftshift(spectrum_ssb)))) hold onplot(f,db(abs(fftshift(spectrum_ssb0))/max(fftshift(spectrum_ssb0))),'r') hold off-140-120-100-80-60-40-20频率 f/Hz归一化幅度 /d b去斜加窗与否对比图-4000-3000-2000-10001000200030004000-150-100-50距离/m归一化幅度 /d b消除了RVP 和距离扭曲的混频信号-4000-3000-2000-1000010002000300040000200400600距离/m幅度消除了RVP 和距离扭曲的混频信号二、检测1、脉冲多普勒(PD 处理)多普勒效应:fd=2v/c*f0,v 为镜像速度;慢时间维上的采样点做FFT 可以测出目标的速度; 使用复信号:频率正负可测量目标速度的方向; clc;clear all ;close all ; f0=10e9;%载频tp=10e-6;%脉冲宽度 B=10e6;%带宽fs=100e6;%采样频率 R0=3000;%初始距离 c=3e8;%光速R=4500;%距离波门gate=R+tp*c/2;%距离波门加脉宽对应距离 N=round(2*gate/c*fs);%波门内采样点个数 fft_N=2^nextpow2(N); t=0:1/fs:tp;%信号长度echo_t=linspace(0,2*gate/c,N);%波门长度 tau=2*R0/c; k=B/tp;%调频系数Tr=100e-6;%脉冲重复周期CPI=64;%总脉冲个数v=60;%目标速度,朝向雷达%发射信号s=exp(i*pi*k*t.^2);%回波信号for m=1:CPIsb(m,:)=rectpuls((echo_t-2*(R0-(m-1)*v*Tr)/c-tp/2)/(tp)).*exp(1i*pi*k *(echo_t-2*(R0-(m-1)*v*Tr)/c).^2-1i*pi*2*f0*round(2*R0/c*fs)+1i*2*pi* (2*f0*v/c)*(m-1)*Tr)+sqrt*(randn(1,N)+1i*randn(1,N));end%脉压fft_n=2^nextpow2(length(t)+N-1);fft_s=fft(s,fft_n);for m=1:1:CPIfft_sb(m,:)=fft(sb(m,:),fft_n);fft_ssb(m,:)=ifft(fft_sb(m,:).*conj(fft_s));z(m,:)=abs(fft_ssb(m,(1:N)));z1(m,:)=z(m,:)/max(z(m,:));z1(m,:)=20*log10(z1(m,:));[maxval,maxpo]=max(z1(m,:));end%FFTfor fm=1:Ndop(:,fm)=fft(fft_ssb(:,fm));a_dop(:,fm)=fftshift(abs(dop(:,fm)));end%求极大值对应的坐标[maxva,max_v]=max(a_dop(:,maxpo));%PD测速fd=(max_v-33)/CPI/Tr;v_pd=fd*c/2/f0%测速范围fd_max=1/Tr/2;v_max=fd_max*c/2/f0%测速精度det_fd=1/Tr/64;det_v=det_fd*c/2/f0figure;mesh(echo_t*c/2,linspace(-75,75,64),a_dop);axis tight;xlabel('距离:m');ylabel('速度:m/s');title('二维距离-多普勒平面');v_pd = v_max =75 det_v =2、形心法测距测速%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 形心法 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clc;clear all;close allf0=10e9;%载频tp=10e-6;%脉冲宽度B=10e6;%带宽fs=100e6;%采样频率R0=3000;%初始距离c=3e8;%光速N=4096; %此为培训期间数据,实际情况可以根据波门和信号宽度求出Nt=(0:N-1)/fs;snr=20;tau=2*R0/c;k=B/tp;%调频系数Tr=100e-6;%脉冲重复周期CPI=64;%总脉冲个数v=60;%目标速度,朝向雷达sigmaf=1^2/(10^(snr/10));s=rectpuls(t-tp/2,tp).*exp(j*pi*k*(t-tp/2).^2);%发射信号% figure;% plot(t,real(s))% xlabel('时间 /s');% ylabel('幅度');% title('发射信号实部');% grid onfor m=1:CPItaum=2*(R0-m*Tr*v)/c;sb=rectpuls(t-taum-tp/2).*exp(j*pi*k*(t-taum-tp/2).^2).*exp(-2j*pi*f0 *taum);%回波信号sb_noise=sb+sqrt(sigmaf/2)*(randn(1,N)+1i*randn(1,N));%加噪声的回波信号fft_ssb=ifft(fft(sb).*conj(fft(s)));%脉压处理fft_ssb_snr=ifft(fft(sb_noise).*conj(fft(s)));Group(m,1:N)=fft_ssb;Group_snr(m,1:N)=fft_ssb_snr;endfigure;imagesc(t*c/2,1:CPI,abs(fft_ssb))figure;imagesc(t*c/2,1:CPI,abs(fft_ssb_snr))for n=1:NGroup2=fft(Group(1:CPI,n));%纵向做FFTGroup2_2=fftshift(abs(Group2));Group3(n,1:CPI)=Group2_2;endfor n1=1:NGroup2_snr=fft(Group_snr(1:CPI,n1));%纵向做FFTGroup2_2_snr=fftshift(abs(Group2_snr));Group3_snr(n1,1:CPI)=Group2_2_snr;endfigure;mesh(abs(Group3))figure;mesh(abs(Group3_snr))[line,row]=find(abs(Group3)==max(max(abs(Group3))));[line_snr,row_snr]=find(abs(Group3_snr)==max(max(abs(Group3_snr)))); Range=t*c/2;PRF=1/Tr;fd=(-CPI/2:CPI/2-1)*PRF/CPI;v=fd*c/2/f0;for Ra=line-3:line+3amp=abs(Group3(Ra,row));C(Ra)=amp*Range(Ra);D(Ra)=sum(amp);endsum(C)/sum(D)for V=row-3:row+3index=abs(Group3(line,V));E(V)=index*v(V);F(V)=sum(index);endsum(E)/sum(F)for Ra_snr=line_snr-3:line_snr+3amp_snr=abs(Group3_snr(Ra_snr,row_snr));C_snr(Ra_snr)=amp_snr*Range(Ra_snr);D_snr(Ra_snr)=sum(amp_snr);endsum(C_snr)/sum(D_snr)for V_snr=row_snr-3:row_snr+3index_snr=abs(Group3_snr(line_snr,V_snr));E_snr(V_snr)=index_snr*v(V_snr);F_snr(V_snr)=sum(index_snr);endsum(E_snr)/sum(F_snr)结果:ans =+003ans =ans =+003ans =3、信号检测结果:mean_noise = +var_noise =pf1 =010002000300040005000600070008000900010000点数模值高斯白噪声取模值后的波形以及检测门限024681012141618200.10.20.30.40.50.60.70.80.91SNR/dB 检测概率检测概率相对于SNR 曲线4、单脉冲测角仿真单脉冲跟踪雷达是通过比较来自两个或多个同时波束的信号获得目标角位置信息的一种雷达;目前常用的单脉冲测角方法主要有幅度和差单脉冲测角和相位和差单脉冲测角。