果蔬采摘机器人
- 格式:docx
- 大小:1.29 MB
- 文档页数:25
基于深度双目视觉处理的智能采摘机器人设计
魏洪玲;李红岩
【期刊名称】《农机化研究》
【年(卷),期】2024(46)7
【摘要】针对采摘机器人对果蔬的位置定位不够准确、无法准确避障,导致采摘效率较低的问题基于深度双目视觉处理对智能采摘机器人进行了设计。
智能采摘机器人的主要组成包括PLC控制器、视觉系统、移动平台、导航系统、机械臂、通信系统和电源。
为了对采摘机器人的机械臂进行最优路径规划并避障,通过对采集的图像进行预处理后,利用双目视觉系统对果蔬进行精准定位,然后采用哈夫变换直线检测的方法进行最优路径的设计和选择,最终确定最优采摘路径。
对采摘机器人进行运动轨迹精度试验和采摘试验,结果表明:采摘机器人对果蔬的采摘成功率较高,可以满足果农对于采摘机器人的要求。
【总页数】5页(P136-140)
【作者】魏洪玲;李红岩
【作者单位】黑龙江东方学院
【正文语种】中文
【中图分类】S225;TP242
【相关文献】
1.基于双目视觉的采摘机器人
2.采摘机器人果实识别与定位研究——基于双目视觉和机器学习
3.采摘机器人识别技术研究——基于深度图像和计算机网络协同处
理4.采摘机器人识别技术-基于深度图像和人工智能协同处理5.基于双目视觉定位的智能葡萄采摘机设计
因版权原因,仅展示原文概要,查看原文内容请购买。

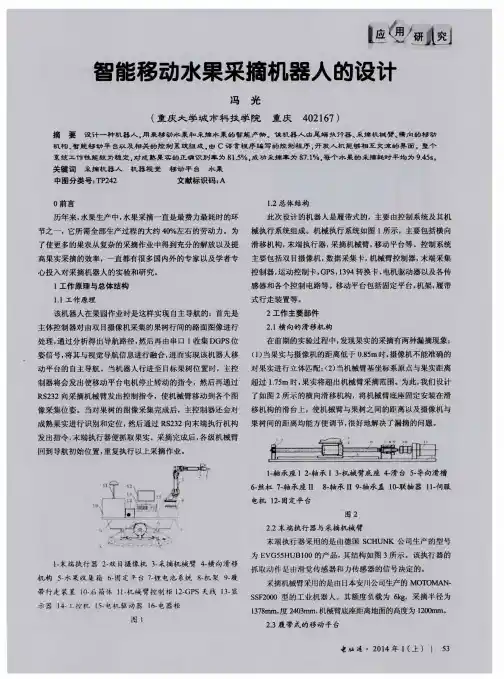
毕业论文(设计)外文翻译题目:运动学和轨迹规划的黄瓜采摘机器人机械手系部名称:专业班级:学生姓名:学号:指导教师:教师职称:20**年03月10日运动学和轨迹规划的黄瓜采摘机器人机械手摘要:为了降低成本,提高黄瓜收获经济效益,黄瓜收获机器人得以发展。
黄瓜果蔬采摘机器人由一辆汽车,一个四自由度关节机械手,一个手端,一个上一个视觉系统与监控、四直流伺服驱动系统组成。
把黄瓜的运动学果蔬采摘机器人机械手使用D-H标系建立了框架模型。
而且它提供了一个逆运动学轨迹规划的基础已经解决了逆变换技术。
摆线针轮运动,它具有的性能的连续性和零速度和加速度的港口及有界区间,采用一种可行的方法在关节空间轨迹规划,研究了果蔬采摘机器人的机械臂的黄瓜。
此外,硬件和摘要软件基于上面的显示器之间的交流及关节的控制器的设计。
实验结果表明,上面的显示器与四关节控制器的沟通,有效地摘要错误的思想和综合四关节角不超过四度。
误差产生的可能因素分析及相应的解决方案,为提高测量精度的措施提出了建议。
关键词:黄瓜果蔬采摘机器人轨迹规划、关节机械臂、运动、摘要、摆线针轮分类号:10.3965/j.issn.1934-6344.2009.01.001-007。
引文:张利兵,杨庆华,宝冠君,高锋,薰易。
运动学和轨迹规划黄瓜收获机器人的机械手。
农业与生物学工程,2009;2(1):1-7。
一.介绍水果和蔬菜的收获是一个劳力密集的工作,由人类劳动和收获的成本大约是33%〜总数的50%,生产成本[1]。
因此,机械化和自动化,迫切需要水果和蔬菜收获。
目前,许多国家正在研究。
收稿日期:08-11-20接受日期:009-03-28传记:张利兵,教授,博士,主要从事农业机器人,机电一体化和控制。
王雁,博士候选人浙江工业大学,主要从事,机器人,智能仪表。
杨庆华,教授,博士,主要从事机器人技术,机电一体化和控制。
宝冠君,讲师,博士,主要从事机器人技术,控制人数及机器视觉。
温室园艺2019-1135现代温室采摘机器人发展概况 郑 刚,刘 佳,李 旭(北京中农富通园艺有限公司,北京100083)DOI: 10.16815/ki.11-5436/s.2019.31.007引言温室园艺产业化发展在西方发达国家的水平很高、规模很大。
荷兰、以色列、日本等发达国家由于受到国土面积等条件的限制,特别重视大型温室现代化、控制智能化、生产自动化等技术的发展。
从20世纪70年代开始,日本的工业机器人发展迅速,这也带动了日本农业机器人的发展。
20世纪末期,日本在设施园艺领域开发了多种成产机器人。
荷兰围绕现代温室研究已经约有70余年的历史,涉及的学科几十个,尤其在温室机器人方面的发展更是领先。
经过不断的发展和探索,中国已成为全球设施农业生产大国,面积和产量都位于世界前列。
虽然近些年来,我们也不断从国外引进、吸收先进的设备,但是与发达国家相比,中国的温室技术装备水平还存在较大的差距。
例如,中国大多数温室还在采用人工或者半自动的设备进行育苗、打药等作业,国外已经实现多种自动化装备相互配合,大大提高了作业效率和质量,降低生产的成本。
发展状况采摘是果蔬生产过程中最耗时、耗力、时效性强的生产环节之一,所投入的劳动力约占整个生产种植过程的40%~50%,随着劳动力成本的不断升高,投入资金也逐步增加。
由于设施栽培模式具有结构化程度高、果蔬采摘频率高的特点,依靠人工劳作的生产方式已经不能满足现代农业发展的需求,所以尤为适合发展机器人化的采摘模式[1]。
目前温室内主要生产的作物有番茄、黄瓜、彩椒、草莓等,一些农业发展大国,如日本、荷兰、美国等已经出现了一批采摘收获的样机,通过提高定位精度,实现自动导航等技术有效的推动了温室采摘机器人的发展,但大部分还是处于实验室应用阶段,并不能应用于实际商业生产过程中。
国内外研究番茄◆Virgo 1号这台机器人是由美国马萨诸塞州名为Root AI的公司开发的应用于农业领域的人工智能机图1 Virgo 1号|摘要|智能化果蔬采摘器人是现代温室中的重要装备,研究其关键的技术具有重要的意义。
基于Kinect的机器人采摘果蔬系统设计王欣;伍世虔;邹谜【摘要】针对果蔬自动采摘的问题,提出了一种以Kinect V 2设备作为机器人的视觉部分来摘取果蔬的系统.采用Kinect V 2视觉设备获得空间的深度图像,由相机的成像模型原理获得果蔬的三维坐标;随后,将数据传递给NAO机器人进行逆运动学分析,并对机器人抵达目标物进行路径规划和可行性分析;最后,根据机器人和果蔬的三维空间相对位置关系,选取最佳的行走路径和采摘策略.实验结果表明:采摘系统能使机器人快速、准确地完成采摘任务.【期刊名称】《农机化研究》【年(卷),期】2018(040)010【总页数】5页(P199-202,207)【关键词】果蔬采摘;Kinect视觉设备;NAO机器人;三维坐标【作者】王欣;伍世虔;邹谜【作者单位】武汉科技大学冶金装备及其控制教育部重点实验室,武汉 430081;武汉科技大学冶金装备及其控制教育部重点实验室,武汉 430081;武汉科技大学冶金装备及其控制教育部重点实验室,武汉 430081【正文语种】中文【中图分类】S225;TP2420 引言我国的果蔬种植面积和产量已处于世界前列,目前的果蔬采摘过程普遍采用人工采摘的方法,自动化水平比较低,成本高,且耗时耗力[1-2]。
随着温室培育果蔬技术的普及,实现智能机器人自动采摘果蔬的需求越来越强烈[3-4]。
相关学者在20世纪就已经开始了智能采摘的研究。
荷兰农业环境工程研究所研发的黄瓜自动采摘机器人,采用近红外技术识别黄瓜成熟的程度并配备机械手进行抓取,同时能够轻松避免损伤黄瓜的表面。
该方法拥有两个视觉系统,配置要求比较高,不具有普遍性[5]。
日本的Yamamoto等研发出草莓采摘机器人,由3个摄像机组成采摘机器人的视觉系统[6],通过切断草莓梗来摘取果实,成功率较低,且视觉系统所采用的摄像机过多导致摘取的速度慢。
美国加利福尼亚西红柿机械公司研发的西红柿采摘机连同西红柿苗一起收割,在采摘之后进行西红柿的分类,采摘的效率很高但智能化程度低[7]。
番茄采摘机器人系统设计与试验王晓楠;伍萍辉;冯青春;王国华【摘要】In order to improve robotic harvesting for fresh tomato and reduce the amount of human labor , this paper de-signed a tomato intelligent picking robot .The picking robot includes:the vision positioning unit , the picking gripper , the control system and carrying platform .Based on the working principle of each component , the working process of picking robot was revised .Based on HIS color model for image segmentation , the recognition accuracy was improved .It used a method of Airbag gripping to ensure the tomato ’ s integrity .The performance test of picking robot indicated that vision po-sitioning module and the gripper module ran well .The execution time of a single harvest cycle was about 24s, and the success rate for harvesting tomatoes was 83.9%.%为了提高鲜食番茄采收的自动化水平,减轻人工采摘劳动强度,设计了一种番茄智能采摘机器人。
基于自动化的苹果采摘机器人引言概述:随着科技的不断进步,自动化技术在各个领域得到了广泛应用。
其中,基于自动化的苹果采摘机器人在农业领域具有重要意义。
本文将从四个方面详细阐述基于自动化的苹果采摘机器人的优势和应用前景。
一、机器人的定位与导航1.1 全球定位系统(GPS):苹果采摘机器人可以通过GPS技术,精确定位果园中的位置,避免迷路和重复采摘,提高工作效率。
1.2 激光雷达:激光雷达技术可以帮助机器人判断苹果树的位置和高度,确保机器人的机械臂能够准确抓取苹果,避免损坏果实。
1.3 视觉识别系统:机器人配备了高分辨率摄像头和图像处理算法,可以识别苹果的成熟度和大小,从而选择合适的时机进行采摘。
二、机械臂的设计与控制2.1 多关节机械臂:机器人采用多关节机械臂设计,能够模拟人手的灵活性和精确控制,实现对苹果的准确抓取和采摘。
2.2 力传感器:机械臂配备了力传感器,可以感知到机械臂与苹果之间的力度,避免过度施力导致果实受损。
2.3 自适应控制算法:机器人采用自适应控制算法,可以根据不同树冠形状和苹果位置的变化,实现机械臂的自动调整和适应,提高采摘效率。
三、果实检测与分级3.1 红外线传感器:机器人配备了红外线传感器,可以检测苹果的糖度和成熟度,实现果实的分级和分类,提高果品质量。
3.2 光谱分析:机器人利用光谱分析技术,可以检测苹果的营养成分和品质特征,实现果实的智能分拣和分类。
3.3 数据处理与记录:机器人可以将采摘的苹果信息进行数据处理和记录,包括采摘时间、果实重量等,为果园管理提供参考依据。
四、自动化维护与充电4.1 自动化维护:机器人配备了自动化维护系统,包括自动清洁机械臂、自动更换刀片等,保证机器人的正常运行和长久使用。
4.2 充电系统:机器人配备了充电系统,可以自动返回充电站进行充电,延长工作时间,提高工作效率。
4.3 远程监控与管理:机器人可以通过云平台实现远程监控和管理,包括工作状态、异常报警等,方便农场主实时了解机器人的运行情况。
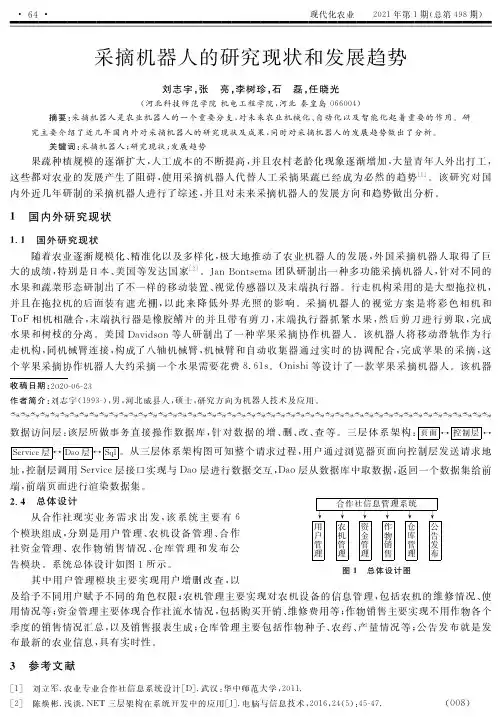
采摘机器人的研究现状和发展趋势刘志宇,张 亮,李树珍,石 磊,任晓光(河北科技师范学院机电工程学院,河北秦皇岛066004)摘要:采摘机器人是农业机器人的一个重要分支,对未来农业机械化、自动化以及智能化起着重要的作用。
研究主要介绍了近几年国内外对采摘机器人的研究现状及成果,同时对采摘机器人的发展趋势做出了分析。
关键词:采摘机器人;研究现状;发展趋势果蔬种植规模的逐渐扩大,人工成本的不断提高,并且农村老龄化现象逐渐增加,大量青年人外出打工,这些都对农业的发展产生了阻碍,使用采摘机器人代替人工采摘果蔬已经成为必然的趋势[1]。
该研究对国内外近几年研制的采摘机器人进行了综述,并且对未来采摘机器人的发展方向和趋势做出分析。
1 国内外研究现状1.1 国外研究现状随着农业逐渐规模化、精准化以及多样化,极大地推动了农业机器人的发展,外国采摘机器人取得了巨大的成绩,特别是日本、美国等发达国家[2]。
JanBontsema团队研制出一种多功能采摘机器人,针对不同的水果和蔬菜形态研制出了不一样的移动装置、视觉传感器以及末端执行器。
行走机构采用的是大型拖拉机,并且在拖拉机的后面装有遮光棚,以此来降低外界光照的影响。
采摘机器人的视觉方案是将彩色相机和ToF相机相融合,末端执行器是橡胶鳍片的并且带有剪刀,末端执行器抓紧水果,然后剪刀进行剪取,完成水果和树枝的分离。
美国Davidson等人研制出了一种苹果采摘协作机器人。
该机器人将移动滑轨作为行走机构,同机械臂连接,构成了八轴机械臂,机械臂和自动收集器通过实时的协调配合,完成苹果的采摘,这个苹果采摘协作机器人大约采摘一个水果需要花费8.61s。
Onishi等设计了一款苹果采摘机器人。
该机器收稿日期:2020 06 23作者简介:刘志宇(1993 ),男,河北威县人,硕士,研究方向为机器人技术及应用。
櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌櫌数据访问层:该层所做事务直接操作数据库,针对数据的增、删、改、查等。
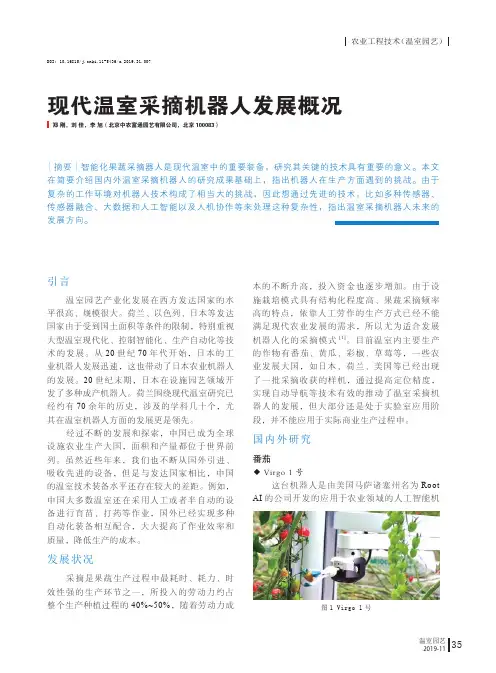
果蔬采摘机器丿是针对水果和蔬菜,
通过编程能完成这些作物的采摘,输送,装箱等相关作业任务的具有感知能力的自
动化机械收获系统。
设计果蔬采摘机器人需解决的主要问题是识别和定位果实,在不损害果实也不损害植株的条件下,按照一定的标准完成果蔬的收获。
同时,也要考虑经济因素,要保证其成本不比其所替代的人工成本高。
W
•理
・1. 1984年,日本京都大学的川村等人开始开始了
对—「的研究,并研制出一台具有5自
特定栽培模式…坡面上种植和平面种植,研制出 了 3种草莓采摘机器人并分别进行了实验。
• 3.荷兰农业环境工程研究所研制出一种多功能
0机械手有7个自由度,采用三菱
RV-E26自由度机械手,在底座上壇
加了 1个线性 滑动由度,采摘成功率约为80%, 需时间45s 。
.,,
由度关节型机械手的机器人。
・ 2 .近藤等人研制出气吸式 ,针对
采摘1条黄
・4.日本冈山大学研制的腸囂晟采用5自 由度的极坐标机械手。
视觉传感器一般采用彩色 摄像机。
该机
器人的特点是,为了提高使用效率,
・5 .以色列和美国联合研制了一台 该机器人主祐架设汪以拖孑立机牵引为动力的移动
平台上,采用黑白图像处理的方法进行甜瓜的识 别和定位,并根据甜瓜的特殊性来增加识别的成 功
率。
试验表明,该机器人可以完甬85%以上的 田间甜瓜的识别 1
开发了多种末端执行器,除了能完成采摘作业,更 換其他的末端执行器还可以完成喷雾、套袋和修 剪枝叶等作业
图1农业机器人简单结构
控器
•用和畧组成的邀
I 可寻找和识别成熟果实。
•带橡月父手指和启动吸嘴的 果实吸住抓
紧后,
的腕关节把果实拧下来而不损
有4个轮子,能在田W 由行走。
仃4仇7 亠•心- •利用
伤果
,把
在第13届中国(寿光)国际蔬菜科技博览会上, 蔬菜机器人在采摘西红柿
迎迎亂©目目C3目於沢G3目0
1、草莓米摘机器人
(一)果蔬采摘机器人定位系统
1.激光扫描测距技术
这种技术利用一束激光在物体表面逐点扫描,根据各点反射的信息判别物体的形状及空间位置。
其测距原理有三种:、
和O
利用这种技术能够达到很高的水果形状精度及空间位置精度,但速度比较慢,成本比较高。
(二)果蔬采摘机器人视觉系统的目标提取大部分水(疏)果处于采摘期时,其果实表面颜色与北京颜色存在较大差异,而同一品种果实表面颜色相近,体现在色彩空间中果实颜色和背景颜色存在着不同分布的特性。
• 1 •果实表面颜色样本采集
• 2•建立果实表面色彩空间参照表• 3■果实图像分害I」
• 4•图像分割实验结果及讨论
果实表面颜色样本釆集
1、使用数码相机直接从田中拍摄图片,并从这些图片中剪裁岀成熟水果的区域
2、使用数码相机在各种自然光条件下(清晨、中午、傍晚、晴天和阴天)拍摄成熟果实,并拍摄相对应的背景(水泥地面以及树叶、杂草等)
3、在可控光强的光箱中用彩色摄像机(使
用图片采集卡)采集各种光照簫件下的真
实果实的图片
建立色彩空间参照表
•建立色彩空间参照表的过程,实际上就是样本像素在色彩空间的分布过程。
\e\
果实图像分割
•有了果实表面颜色色彩空间参照表以后,很容易判断一个像素点是否为目标像素点
•判断方法:在每个像素点的5X5邻域内统计目标像素点个数,超过半数时则认为该点是目标像素点,否则认为是非目标像素占O
水果表面颜色样本色彩空间分布图H水果表面颜色样本色彩空间分布
图
目标分割实验结果
f胪
色删唯
农业机器人的发展与展望
•发展
目前,大部分果蔬采摘机器人还处于研究阶段,离实用化
和商品化还有一定的距离。
其主要原因是:
1 •机器人智能化程度没有达到农业生产的要求。
农业生产的非结构性和田间工作的不确定性要求采摘机器人具有较高的的智能和柔性生产的能力。
2•采摘效率不高,普遍低于人工采摘。
这主要是由于图像处理时间较长,以及机器人的自由度多,对其控制需要话费较长时间。
予
3•机器人的制造成本较高,而且其应用的季节性较强,使
/仁
7只巾'
•展望:
采摘智能化机器人的研究需要在一下几个方面进行努力:1开发岀智能化程度高的视觉处理系统,]能够对
要采摘的成熟果蔬进行准确的识别和精确定位。
2提高图像处理硬件的处理速度,优化软件的算法,同
时简化机器人结构,降低控制难度,从而提高采摘工作
效率
3设计开放式的采摘机器人,提高机器人的通用性。
通
过更换末端执行器既能采摘丕同的果蔬, 提高机器人使用效率。
J^reyou out there?。