基于灰色预测PID控制及LabVIEW的直流电机调速系统设计
- 格式:pdf
- 大小:605.80 KB
- 文档页数:4

基于LabVIEW的直流电机PID速度控制系统设计沈峰;钟胜奎;仲兆准;张运诗;谢光伟【摘要】PID control algorithm is designed to control the speed of DC motor,based on the NI ELVIS II+experimental platform and graphic system design software LabVIEW. This control algorithon reflects the flexibility of virtual instrument technology and breaks through the traditional instrument limitation in data processing, expression and storage.%基于NI ELVIS II+实验平台及LabVIEW图形化系统设计软件,设计了一种用PID控制算法对直流电机转速的控制系统,体现了虚拟仪器技术的灵活性,突破了传统仪器在数据处理、表达以及存储方面的限制。
【期刊名称】《机械制造与自动化》【年(卷),期】2014(000)003【总页数】3页(P189-190,207)【关键词】LabVIEW;PID控制;直流电机【作者】沈峰;钟胜奎;仲兆准;张运诗;谢光伟【作者单位】苏州大学机电工程学院江苏苏州215021;苏州大学沙钢钢铁学院江苏苏州215021;苏州大学沙钢钢铁学院江苏苏州215021;苏州大学机电工程学院江苏苏州215021;苏州大学机电工程学院江苏苏州215021【正文语种】中文【中图分类】TM330 引言直流电机是机械能和直流电能互相转换的旋转机械装置,直流电机具有较好的调速性能和较大的启动转矩,因此,对调速要求较高的生产机械(例如龙门刨床、镗床、轧钢机等)或者需要较大启动转矩的生产机械(例如起重机械、电力牵引设备等)往往采用直流电机来驱动。

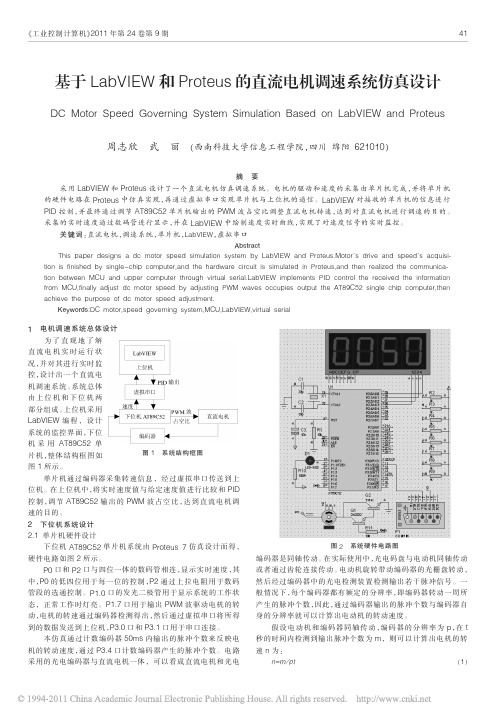
基于LabVIEW直流电机转速测控系统的设计张应和【摘要】电机转速的精确度、实时性和稳定性直接影响电机调速系统的性能,文中介绍了一款基于LabVIEW软件平台的直流电动机转速测量控制系统,利用增量式光电编码器将电机的转速转换为脉冲信号,通过计算机LabVIEW软件里的用户界面对电机转速进行设定,设定范围为0~2500 r/min;经过多次调试,得出理想的PID控制参数(P=1,I=1.2,D=0);再通过数据采集卡输出给电机驱动芯片来完成对电枢电压的控制,最后发现当直流电机电枢电压控制在0~2.8 V范围内,电机实际输出转速为最佳状态.【期刊名称】《电子设计工程》【年(卷),期】2019(027)012【总页数】5页(P66-70)【关键词】LabVIEW;PID;数据采集;电机转速【作者】张应和【作者单位】西安铁路职业技术学院机电工程学院,陕西西安 710026【正文语种】中文【中图分类】TN6目前,国内大多数大专高职院校都采用传统的实验教学方法,侧重于理论验证和模仿训练,内容模式固定,学生思维限定僵化,缺乏创新意识和综合应用能力,难以调动学生的主动性和创造性,从而在很大程度上制约了实验教学的发展和人才培养质量的提高,严重影响了教学及科研,本文采用LabVIEW软件开发平台,在结合国内外电机测试系统的基础上,研究并设计了这款基于LabVIEW的直流电动机转速测控系统,用于传感器实验教学,以提高实验教学水平和教学质量[1]。
1 系统总体设计该电机转速测控系统是结合目前已有的实验仪器及设备来搭建和设计的,设计思路如图1所示,先启动直流电动机,利用增量式光电编码器来采集直流电机的转速,然后将采集到的转速信号转换脉冲信号输送给数据采集装置的输入端口,数据采集装置将信号进行A/D转换后输送给计算机,通过计算机LabVIEW虚拟仿真软件对系统控制参数进行设定,再利用PID控件来实现对电机转速的调控,之后再通过数据采集装置进行D/A后输送至直流电机的驱动芯片,即通过改变直流电机的电枢电压的大小,从而改变电机的转速来到达系统的要求[2]。

直流电机转速PID控制系统设计学院:专业班级:姓名:学号:指导老师:目录第一章PID简介 (1)第二章直流电机工作原理 (6)2.1 工作原理 (6)2.2、直流电机PID控制原理方框图 (7)第三章控制系统方案选择 (10)3.1 系统设计要求 (10)3.2 系统模块设计 (12)第四章硬件设计与实现 (17)4.1 硬件设计 (17)4.2系统面板图 (24)第五章流程设计 (26)5.1 软件设计流程图 (26)第六章程序说明 (30)6.1 直流电机部分程序 (30)6.2 温度检测部分程序 (37)第七章说明及调试 (46)7.1 调试过程 (46)7.2 运行结果 (47)第八章课程设计体会 (49)第一章 PID简介PID (比例积分微分,英文全称为Proportion Integration Differentiation)控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
PID控制器的参数整定是控制系统设计的核心内容。
它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。
它主要是依据系统的数学模型,经过理论计算确定控制器参数。
这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。
基于NiosⅡ的直流电机PID调速控制系统0 引言以往的直流电机调速系统通常采用单片机或DSP 进行控制,而单片机需要使用大量的外围电路,且系统的可升级性差,如更换控制器,往往要对整个软硬件进行重新设计,可重用性不高。
而采用DSP 作为主要控制器,如果碰到处理多任务系统时,一片DSP 不能胜任,这时就需要再扩展一片DSP或者FPGA 芯片来辅助控制,从而实行双芯片控制模式。
但这样做,既增加了两个处理器之间同步和通信的负担,又使系统实时性变坏,延长系统开发时间。
基于以上此类问题,本文提出了采用Altera 公司推出的NiosⅡ软核来控制直流电机调速系统,它的好处在于Ni-osⅡ属于软核处理器,可以直接通过软件形式扩展成双核乃至多核,无需外加芯片;再者NiosⅡ软核处理器和所有外围电路可以集成到一片FPGA 芯片上来实现整个直流电机控制系统,这样无疑大大减小了控制器体积和重量,设计人员也可以在短时间内完成整个系统的制作,提高了工作效率。
本文利用Altera 公司的FPGA 芯片EP2C35F672C6 作为系统控制器,采用数字PID 算法对直流电机进行PWM 闭环调速控制。
并且利用硬件描述语言(VHDL)自行设计、生成PWM 模块和测速模块,最后通过实验验证了该系统的可行性。
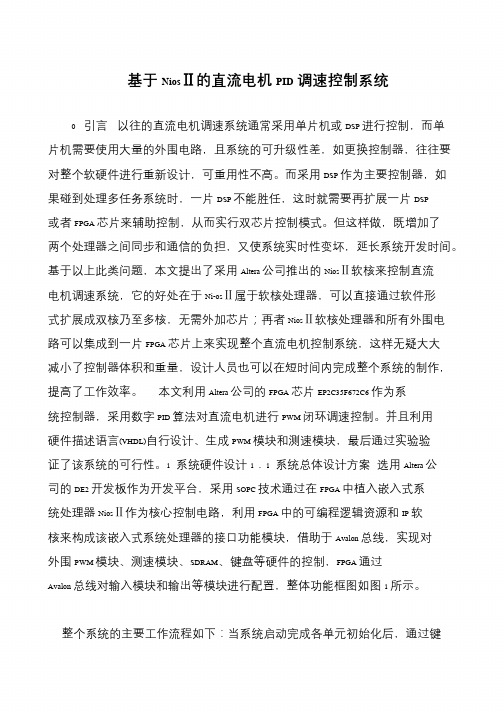
1 系统硬件设计1.1 系统总体设计方案选用Altera 公司的DE2 开发板作为开发平台,采用SOPC 技术通过在FPGA 中植入嵌入式系统处理器NiosⅡ作为核心控制电路,利用FPGA 中的可编程逻辑资源和IP 软核来构成该嵌入式系统处理器的接口功能模块,借助于Avalon 总线,实现对外围PWM 模块、测速模块、SDRAM、键盘等硬件的控制,FPGA 通过Avalon 总线对输入模块和输出等模块进行配置,整体功能框图如图1 所示。
整个系统的主要工作流程如下:当系统启动完成各单元初始化后,通过键。

调速原理对于星形连接的三相无刷直流电机,在理想条件下,任何时刻只有两相定子绕组通电。
令加在两相通电绕组上的平均电压为Vd,则电压平衡方程式为[31]:(3.1)可以得到转速为:(3.2)式中:Em为电机各相反电动势;Im为各相相电流;n为无刷直流电机转速;R为回路等效电阻,包括电机两相电阻和管压降的等效电阻。
由式(3.2)可知,无刷直流电机的转速调节可以通过改变外施平均电压Vd来实现。
3-4-2电枢电压的调节方法改变电枢电压是直流调速的主要方法。
本系统采用PWM(脉宽调制)调速方式,通过调节逆变器功率器件的PWM触发信号的占空比来改变外施的平均电压Vd,从而实现无刷直流电机的调速。
PWM技术可分为单极性PWM控制和双极性PWM控制。
单极性PWM控制的控制信号如图3.4所示,在每个60°电角度的区域内,一个功率开关器件一直处于开通状态,另一个处于PWM状态;双极性PWM控制的控制信号如图3.5所示,在每个60°电角度区域内,两个工作的功率管器件或者都开通,或者都关断。
图3.4单极性PWM控制各触发信号图3.5双极性PWM控制各触发信号Fig.3.4Trigger signal of single polarity PWM Fig.3.5Trigger signal of double polarity PWM一般情况来说,采用单极性PWM控制的电流波动最大值只有采用双极性PWM控制的电流波动最大值的一半[32][33],因此为了减小电流脉动和功率管的开关损耗,本电机控制系统采用单极性的PWM控制技术。
3-4-3 PWM波的产生在传统的单片机控制系统中,PWM波的产生需要专门的发生电路和时间延时(死区)电路,增加了CPU的开销,并降低了系统的稳定性。
而TMS320F2812的PWM电路设计可以减少产生PWM波形的CPU开销和减少用户的工作量,同时能尽量减小功率开关器件的损耗,降低电动机转矩脉动性。
序号(学号〉: 161240303长春大学 毕业设计(论文)直流电机速度PID 控制系统设计李一丹国际教育学院自动化1612403曹福成2016 年 5 月 30 0姓 名 学 院 专 业 班 级 指导教师直流电机速度PID控制系统设计摘要:针对现有的直流电机控速难的问题,本文设计了一种基于ATmegal6L单片机的直流电机速度控制系统。
本系统以ATinegal6L单片机为主控制器,搭载了L298n为电机驱动,通过霍尔元件进行测速,通过按键控制电机的转动方向和转动速度,并配以温度传感器DS18B20对温度进行监测,通过PID算法调节PW\1 进行对速度控制。
该系统包括的模块主要有单片机为主体的控制模块、电机的驱动模块、对电机速度进行监测的模块、由LCD1602构成的显示ky r模块、电源模块和按键控制模块等。
本系统可以通过PID算法实现可编程脉宽波形对直流电机的速度进行控制,并且可以显示出当前电机的转速。
关键词:单片机;PID算法;直流电机The design of DC motor speed control system with PID Abstract: According to the existing DC motor speed control problem, this paper describes the design of a DC motor speed control system based on ATmegal6L MCU. To ATMEGA16L microcontroller as the main controller for the system, equipped with a L298n for motor drive, through the hall element of speed, through the buttons to control the motor rotation direction and the rotation speed, and the temperature sensor DS18B20 the temperature monitoring, PID algorithm is used to adjust the PWM control of the speed. The system includes the following modules display microprocessor control module, as the main body of the motor drive module, monitoring module, the speed of motor is composed of LCD1602 module, power supply module and key control module.This system can realize through PID algorithm to control the speed of the programming pulse waveforms of DC motor, and can display the current motor speed.Keywords: single chip microcomputer, PID algorithm, DC motor ky r戈ml ml ——II —In —In | * 11—I 1111 ml 1111目录Bit (1)l.i选题背景及意义 (1)1.2国内外研宄现状 (2)1.3木文主要研究的内容 (3)第2章总体方案论述 (4)ky r2.1系统主要传感器介绍 (4)2.1.1温度传感器 (4)2.1.2转速检测模块 (5)2.2系统总体功能及方案选择 (6)2.2.1系统所需模块及功能 (6)2.2.2主控制器选择 (8)第3章系统总体硬件设计 (10)3.1单片机最小系统 (10)3.1.1ATmegal6L单片机的引脚分布 (10)3.1.2最小系统的硬件电路 (13)3.2电机驱动电路 (14)3.3温度检测电路 (15)3.4光电管提示电路和按键控制电路 (15)3.5LCD1602 显示电路 (16)3.6电源电路 (17)3.7本章小节 (18)第4章系统软件设计 (19)4.1系统总体流程图 (19)4.2 PID算法简介 (19)4.2.1PID算法介绍 (20)4.2.2HD算法结果 (21)4.3系统调试步骤 (21)4.4误差分析即改进方法 (22)给论 (23)致谢 (24)参考文献 (25)隱 (26)附录I系统总体硬件电路图 (26)附录II系统中部分程序 (27)ky r In—ml ml ml ml | , I af—.第1章绪论1.1选题背景及意义电动机简称电机,俗称马达,在现实生活中,我们处处都可以见到电机的身影,小到小学生玩的电动四驱车,大到炼钢厂用的滚动罐,这些都是电机家族的成员。
利用LabVIEW进行电机控制与调试LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一款基于图形化编程语言的开发环境,广泛应用于科学与工程领域的数据采集、分析、控制以及调试等方面。
本文介绍如何利用LabVIEW进行电机控制与调试,包括步进电机和直流电机的控制方法以及相关调试技巧。
一、步进电机控制步进电机是一种离散控制的电机,通过对电机驱动成组的正向或反向脉冲信号,实现旋转角度的精确控制。
LabVIEW提供了丰富的工具和函数来实现步进电机的控制。
首先,在LabVIEW中创建一个新的VI(Virtual Instrument)文件。
在Block Diagram中选择一个While Loop,并在循环内部添加若干个控制步进电机运动的代码。
例如,可以通过控制单个IO口的高低电平来实现脉冲信号的输出。
使用LabVIEW中的Digital Output模块,将其配置为输出模式,并将其与步进电机驱动器的脉冲接口连接。
然后,在每次循环迭代中,将该IO口的电平设置为高电平,然后延时适当时间,再将其设置为低电平,即可输出一个脉冲信号。
此外,还可以通过使用计数器或定时器模块来生成脉冲信号。
LabVIEW中的Counter和Timer模块可以方便地设置计数器的初值、计数范围以及计数速率。
通过适当的配置和调试,可以实现步进电机的精确控制。
二、直流电机控制直流电机是一种常见的电动机类型,广泛应用于各种机械设备中。
LabVIEW也提供了多种方法来实现直流电机的控制。
首先,在LabVIEW中创建一个新的VI文件。
使用LabVIEW中的Analog Output模块来生成电机驱动信号。
将Analog Output模块与直流电机驱动器的控制端口连接,通过调整模块输出的电压值,可以实现对直流电机的转速和方向的控制。
LabVIEW还提供了PID控制器模块,可用于进一步优化直流电机的控制效果。
直流电机调速控制系统的设计首先,硬件设计是直流电机调速控制系统的基础。
设计者需要选择合适的电机驱动器,通常选择的是直流驱动器。
直流驱动器的选型要考虑到电机的额定功率、额定电流和额定电压等因素。
此外,还需要选择适合的控制电路,如电流反馈回路、速度反馈回路和位置反馈回路等。
其次,软件编程是直流电机调速控制系统的核心。
控制系统的编程部分需要涉及到控制算法的实现,通常采用PID控制算法。
PID控制算法是一种经典的控制算法,可以实现较好的调速性能。
在编程中,需要考虑到控制系统的响应速度、稳定性和抗干扰性等因素。
同时,还需要编写界面程序,实现与上位机的通信和数据传输等功能。
第三,传感器的选择也是直流电机调速控制系统的关键。
常见的传感器包括光电编码器、霍尔传感器和磁编码器等。
传感器的种类和参数选择要根据具体的应用需求确定。
例如,如果需要测量电机的转速,可以选择光电编码器;如果需要测量电机的位置,可以选择磁编码器。
最后,控制算法是直流电机调速控制系统的核心。
常用的控制算法包括开环控制和闭环控制。
开环控制是指通过事先设定的输入信号来控制电机转速,不考虑反馈信息。
闭环控制则是通过传感器测量的反馈信号来实时调节输入信号,以实现需要的转速。
对于直流电机调速控制系统的设计,可以按照以下步骤进行:1.确定应用需求,包括所需转速范围、转速精度要求等。
2.根据应用需求选择适合的电机、驱动器和传感器。
3.进行硬件设计,包括电路布局、传感器连接和驱动器安装等。
4.进行软件编程,包括控制算法的设计和实现、数据通信和界面设计等。
5.进行系统联调,包括对系统的各个组件进行测试和调试,确保系统工作正常。
6.进行性能测试,包括对系统的转速响应、稳定性和抗干扰性进行测试。
7.最后,进行系统的优化和调试,以达到最好的调速控制效果。
综上所述,直流电机调速控制系统的设计涉及到硬件选型、软件编程、传感器选择和控制算法等多个方面。
设计者需要综合考虑各个因素,根据实际应用需求进行系统设计,以实现最佳的调速控制效果。