§3多处理机的并行和性能
- 格式:ppt
- 大小:469.50 KB
- 文档页数:65
向量处理机向量处理机(vector computer),面向向量型并行计算,以流水线结构为主的并行处理计算机。
向量是计算机系统中经常使用的一种数据类型,向量由一组有序、具有相同类型和位数的元素组成。
采用先行控制和重叠操作技术、运算流水线、交叉访问的并行存储器等并行处理结构,对提高运算速度有重要作用。
但在实际运行时还不能充分发挥并行处理潜力。
向量运算很适合于流水线计算机的结构特点。
为了成分发挥流水线处理机的效率,实现高性能计算,有得流水线处理机设置了向量数据表示和相应的向量指令,这就是所谓的向量处理机。
向量型并行计算与流水线结构相结合,能在很大程度上克服通常流水线计算机中指令处理量太大、存储访问不均匀、相关等待严重、流水不畅等缺点,并可充分发挥并行处理结构的潜力,显著提高运算速度。
内容简介:向量处理机(vector computer),面向向量型并行计算,以流水线结构为主的并行处理计算机。
向量运算是一种较简单的并行计算,适用面很广,机器实现比较容易,使用也比较方便,因此向量处理机(向量机)获得了迅速发展。
TI ASC(1972年)和CDC STAR-100 (1973年)是世界上第一批向量巨型计算机(巨型机)。
到1982年底,世界上约有60台巨型机,其中大多数是向量机。
中国于1983年研制成功的每秒千万次的757机和亿次的“银河”机也都是向量机。
向量机适用于线性规划、傅里叶变换、滤波计算以及矩阵、线性代数、偏微分方程、积分等数学问题的求解,主要解决气象研究与天气预报、航空航天飞行器设计、原子能与核反应研究、地球物理研究、地震分析、大型工程设计,以及社会和经济现象大规模模拟等领域的大型计算问题。
1.向量的运算:在普通计算机中,机器指令的基本操作对象是标量,而向量机除了有标量处理功能外还具有功能齐全的向量运算指令系统。
对一个向量的各分量执行同一运算,或对同样维数的两个向量的对应分量执行同一运算,或一个向量的各分量都与同一标量执行同一运算,均可产生一个新的向量,这些是基本的向量运算。

并⾏计算与分布式计算区别与联系并⾏计算、分布式计算以及⽹格计算和云计算都是属于⾼性能计算(HPC)的范畴,主要⽬的在于对⼤数据的分析与处理,但它们却存在很多差异。
我们需要了解两者的原理、特点和运⽤的场合,对云计算的了解⼤有裨益。
之所以将两种计算技术放在⼀起,是因为这两种计算具有共同的特点,都是运⽤并⾏来获得更⾼性能计算,把⼤任务分为N个⼩任务。
但两者还是有区别的,关于两者的区别在后⾯有介绍。
并⾏计算1、并⾏计算概念并⾏计算(Parallel Computing)⼜称平⾏计算是指⼀种能够让多条指令同时进⾏的计算模式,可分为时间并⾏和空间并⾏。
时间并⾏即利⽤多条流⽔线同时作业,空间并⾏是指使⽤多个处理器执⾏并发计算,以降低解决复杂问题所需要的时间。
并⾏计算同时使⽤多种计算资源解决计算问题的过程。
为执⾏并⾏计算,计算资源应包括⼀台配有多处理机(并⾏处理)的计算机、⼀个与⽹络相连的计算机专有编号,或者两者结合使⽤。
并⾏计算主要⽬的在于两个⽅⾯: (1) 加速求解问题的速度。
(2) 提⾼求解问题的规模。
2、并⾏计算的原理并⾏计算能快速解决⼤型且复杂的计算问题。
此外还能利⽤⾮本地资源,节约成本 ― 使⽤多个“廉价”计算资源取代⼤型计算机,同时克服单个计算机上存在的存储器限制。
为提⾼计算效率,并⾏计算处理问题⼀般分为以下三步: (1)将⼯作分离成离散独⽴部分,有助于同时解决; (2)同时并及时地执⾏多个程序指令; (3)将处理完的结果返回主机经⼀定处理后显⽰输出。
从上图可以看出,串⾏计算必须按步骤⼀步⼀步计算才能出来最终结果。
⽽并⾏计算则要将问题分成N多个⼦任务,每个⼦任务并⾏执⾏计算。
⽽每个⼦任务是⾮独⽴的,每个⼦任务的计算结果决定最终的结果。
这个和分布式计算不同。
3、并⾏计算需满⾜的基本条件(1)并⾏计算机。
并⾏计算机⾄少包含两台或两台以上处理机,这此处理机通过互联⽹络相互连接,相互通信。
(2)应⽤问题必须具有并⾏度。
3.4 体系结构其他基础知识3.4.1主要知识点了解掌握流水线技术、RISC计算机、并行处理技术、多处理机系统方面的基本知识。
3.4.1.1流水线技术流水线技术是通过并行硬件来提高系统性能的常用方法。
计算机流水线技术包括指令流水线和运算操作流水线。
计算机中一条指令的执行需要若干步,通常采用流水线技术来实现指令的执行,以提高CPU 性能。
流水线设计的基本思想其实很简单,任何一个可以分解的任务都可以用流水线来做,可以设置多个处理机构,分别执行相应的子任务。
为了提高流水线性能,有些处理时间长的步骤还需分解成更小的步骤,使流水线上所有步骤的处理时间相同。
实际上,流水线技术对性能的提高程度取决于其执行顺序中最慢的一步。
在实际情况中,流水线各个阶段可能会相互影响,阻塞流水线,使其性能下降。
阻塞主要由两种情形引起:执行转移指令和共享资源冲突。
指令流水线技术其实是把处理瓶颈从CPU子系统转移给了存储子系统。
在存储系统中也需要使用流水线技术的CPU系统的处理能力。
流水线计算机的存储器分成若干(4个)独立存储体,以支持流水线方式并发访问。
流水线计算机也使用了Cache,通常分为指令Cache和数据Cache,各自用于存放指令和操作数。
3.4.1.2RISC计算机的主要特点①指令数量少:RISC机优先选取使用频率最高的一些简单指令以及一些常用的指令,避免使用复杂指令。
②复杂的寻址方式少:RISC机通常支持寄存器寻址方式、立即数寻址方式以及相对寻址方式。
③指令长度固定,指令格式种类少:因为RISC指令数量少,格式也相对简单(与CISC比较)其指令长度固定,指令之间各字段的划分比较一致,所以其译码也相对容易。
④只提供了Load/Store指令访问存储器。
⑤以硬布线逻辑控制为主:RISC机为了提高操作的执行速度,通常采用硬布线逻辑(组合逻辑)来构建控制器。
而CISC机的指令系统很复杂,难以用组合逻辑电路来实现控制器,通常采用微程序控制。
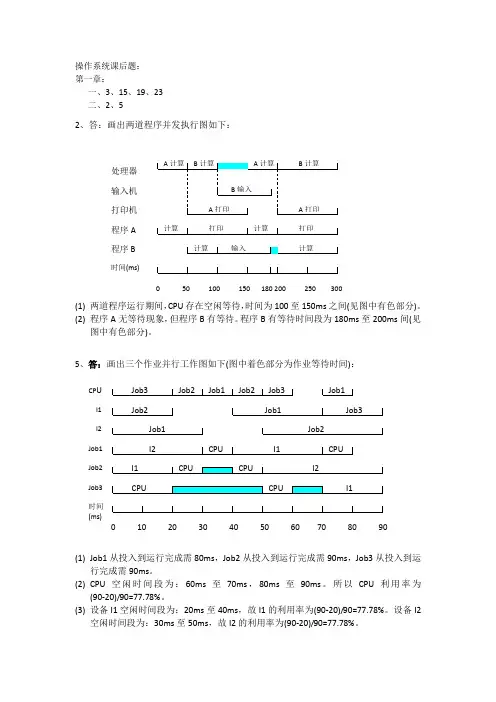
操作系统课后题:第一章:一、3、15、19、23二、2、52、答:画出两道程序并发执行图如下:(1)两道程序运行期间,CPU存在空闲等待,时间为100至150ms之间(见图中有色部分)。
(2)程序A无等待现象,但程序B有等待。
程序B有等待时间段为180ms至200ms间(见图中有色部分)。
5、答:画出三个作业并行工作图如下(图中着色部分为作业等待时间):(1)Job1从投入到运行完成需80ms,Job2从投入到运行完成需90ms,Job3从投入到运行完成需90ms。
(2)CPU空闲时间段为:60ms至70ms,80ms至90ms。
所以CPU利用率为(90-20)/90=77.78%。
(3)设备I1空闲时间段为:20ms至40ms,故I1的利用率为(90-20)/90=77.78%。
设备I2空闲时间段为:30ms至50ms,故I2的利用率为(90-20)/90=77.78%。
第二章:一、18、20、26、38、48二、5、12、16、20、25、285、答:采用短作业优先算法调度时,三个作业的总周转时间为:T1=a+(a+b)+(a+b+c)=3a+2b+c ①若不按短作业优先算法调度,不失一般性,设调度次序为:J2、J1、J3。
则三个作业的总周转时间为:T2=b+(b+a)+(b+a+c)=3b+2a+c ②令②-①式得到:T2-T1=b-a>0可见,采用短作业优先算法调度才能获得最小平均作业周转时间。
12、答:(1)FCFS 调度算法(2)优先级调度算法(3)16、答:20、答:注意,J1被调度运行后,直到它执行结束,才会引出作业调度程序工作。
所以,J2至J6虽在J1执行期间进入,但未被调度,均在等待。
当J1撤离后,作业调度程序工作,按SJF算法,显然有执行次序:J5、J6、J3、J4、和J2。
25、答:每个作业运行将经过两个阶段:作业调度(SJF算法)和进程调度(优先数抢占式)。
另外,批处理最多容纳2道作业,更多的作业将在后备队列等待。
《基于AMP架构的机载多核处理技术研究》篇一一、引言随着航空技术的飞速发展,机载设备对处理器的性能要求越来越高。
为了满足这种需求,基于AMP(异构多核处理)架构的机载多核处理技术应运而生。
这种技术能够通过高效的并行计算和多核协同处理,显著提高机载设备的处理能力。
本文将详细探讨基于AMP架构的机载多核处理技术的相关研究。
二、AMP架构概述AMP架构是一种异构多核处理架构,它通过将不同类型的处理器核心(如CPU、GPU、DSP等)集成在一起,实现高效的并行计算。
这种架构具有以下特点:1. 高度并行性:AMP架构可以通过多个处理器核心同时处理不同的任务,从而提高整体处理性能。
2. 灵活性:不同的处理器核心可以处理不同类型的任务,从而实现灵活的任务调度和分配。
3. 扩展性:AMP架构可以方便地添加或移除处理器核心,以适应不同的应用需求。
三、机载多核处理技术机载多核处理技术是将AMP架构应用于机载设备的一种技术。
由于机载设备对处理器的性能、功耗、可靠性等方面有严格要求,因此机载多核处理技术需要具备以下特点:1. 高性能:机载多核处理技术需要具备高处理性能,以满足机载设备对数据处理速度的要求。
2. 低功耗:机载设备通常需要长时间运行,因此低功耗是机载多核处理技术的重要考虑因素。
3. 高可靠性:机载设备的可靠性对飞行安全至关重要,因此机载多核处理技术需要具备高可靠性。
四、基于AMP架构的机载多核处理技术研究基于AMP架构的机载多核处理技术的研究主要涉及以下几个方面:1. 处理器核心设计:针对机载设备的特点和需求,设计适合的处理器核心,包括CPU、GPU、DSP等。
这些处理器核心需要具备高性能、低功耗、高可靠性等特点。
2. 并行计算优化:通过优化并行计算算法和任务调度策略,提高AMP架构的并行计算性能。
这包括任务划分、负载均衡、数据传输等方面的优化。
3. 系统集成与验证:将设计好的处理器核心集成到机载设备中,并进行系统级验证。

并行计算Parallel Computing编并行计算——结构•算法•编程▪第一篇并行计算的基础第章并行计算与并行计算机结构模型▪第一章▪第二章并行计算机系统互连与基本通信操作▪第三章典型并行计算机系统介绍▪第四章并行计算性能评测第一章并行计算及并行机结构模型▪ 1.1 计算与计算机科学▪ 1.2* 单处理机与指令级并行▪ 1.3* 多核处理器与线程级并行▪ 1.1.4 4 并行计算机体系结构▪ 1.4.1 并行计算机结构模型4.2 并行计算机访存模型▪ 1.1.4.2▪ 1.4.3 Intel和AMD多核CPU架构并行计算计算科学计算需求并行计算、计算科学、计算需求▪并行计算:并行机上所作的计算,又称高性能并行计算并行机上所作的计算又称高性能计算或超级计算。
▪计算科学:计算物理、计算化学、计算生物等。
▪计算是科学发现的三大支柱之一。
▪科学与工程问题的需求:气象预报、油藏模拟、核武器数值模拟、航天器设计、基因测序等。
▪需求类型:计算密集、数据密集、网络密集。
()▪美国ASCI计划(1996):核武器数值模拟。
第一章并行计算及并行机结构模型▪ 1.1 计算与计算机科学▪ 1.2* 单处理机与指令级并行▪ 1.3* 多核处理器与线程级并行▪ 1.1.4 4 并行计算机体系结构▪ 1.4.1 并行计算机结构模型4.2 并行计算机访存模型▪ 1.1.4.2▪ 1.4.3 Intel和AMD多核CPU架构并行计算机结构模型并计算结构型(d) 分布共享存储处理机 DSM(a) 并行向量处理机 PVP(b) 对称多处理机 SMP(c) 大规模并行处理机 MPPVP: Vector ProcessorSM : Shared MemoryP/C: Microprocessor and Cache MB: Memory BusLM: Local MemoryNIC:Network Interface Circuitry DIR: Cache Dirctory并行计算机体系合一结构▪SMP、MPP、DSM和COW并行结构渐趋一致。
(⼀)操作系统的基本特性
操作系统的特性
1.并发性
并⾏:指两个或多个事件能在同⼀时刻发⽣
并发:两个或多个事件能在同⼀时间间隔发⽣
操作系统引⼊进程和线程实现并发
2.共享性
共享是指操作系统中的资源可以提供内存中多个并发执⾏的进程(线程)执⾏。
包括互斥共享⽅式和同时访问⽅式。
3.虚拟性
虚拟指通过某种技术把⼀个物理实体变为若⼲个逻辑上的对应物。
操作系统中主要是时分复⽤(虚拟处理机技术
虚拟设备技术)和空分复⽤技术(虚拟磁盘技术、虚拟存储器技术)。
4.异步性
由于各⽤户程序性能的不同,⽐如,有的侧重于计算⽽较少需要 I/O,⽽有的程序其计算少⽽ I/O 多,这样,很可能是先进⼊内存的作业后完成,⽽后进⼊内存的作业先完成。
或者说,进程是以⼈们不可预知的速度向前推进,此即进程的异步性。
操作系统的主要功能
1.处理机管理(进程管理,进程同步,进程通信,调度)
2.存储器管理(内存分配,内存保护,地址映射,内存扩充)
3.设备管理
4.⽂件管理
各种操作系统的区别
1. 批处理操作系统:成批处理、系统吞吐量⾼、资源利⽤率⾼、⽤户不能⼲预作业的执⾏
2. 分时操作系统:它能很好地将⼀台计算机提供给多个⽤户同时使⽤,提⾼计算机的利⽤率。
多路性、独⽴性、及时性、交互性
3. 实时操作系统:是指系统能及时(或即时) 响应外部事件的请求,在规定的时间内完成对该事件的处理,并控制所有实时任务协调⼀致地运⾏。
及时响应、快速处理、⾼可靠性和安全性、不要求系统资源利⽤率(飞机⽕车票订票系统,情报检索系统等)。