KELONG 前端智能设备通讯协议
- 格式:doc
- 大小:99.00 KB
- 文档页数:13
前后端通信协议 随着互联网的发展,前后端分离的应用模式越来越普遍,前端负责展示页面,后端负责数据处理和存储,而前后端之间的通信则需要依靠特定的协议来完成。下面将从协议的概念、前后端通信协议类型、通信协议的使用等方面介绍前后端通信协议。 概述 通信协议是指通信双方之间所达成的一种共同的协议和规范,以便数据通信、信息交换或物理参数变换。通信协议规定了通信双方的通信方式、传输数据的格式、传输控制方法等内容。在前后端通信中,通信协议起到了关键作用,不同的通信协议对应不同的应用场景,可以为前后端开发带来便捷和效率。 前后端通信协议类型 1. HTTP协议 HTTP协议是一种应用层协议,一般用于Web应用中,HTTP协议传输的数据可在浏览器和服务器之间进行互通,是前端和后端通信的最基本的协议之一,也是应用最广泛的一种通信协议。基于HTTP协议的前后端通信方式一般是前端发起一次HTTP请求,后端接收到请求后将处理结果传回给前端,这种通信方式可以实现短链接和长链接的通信。 2. WebSocket协议 WebSocket协议是一种全双工通信协议,用于Web应用中,可以实现前后端之间的实时通信。相比于HTTP协议,WebSocket协议可以在不造成额外负担的情况下保持长时间连接,通信响应速度更加快速,因此适用于在线聊天、数据监控等需要实时交互的场景。 3. RPC协议 RPC协议(Remote Procedure Call Protocol)是一种远程过程调用协议,允许客户端访问远程服务器上的程序或服务。RPC协议的特点是能够在各种平台(不同编程语言、操作系统)之间实现跨平台通信,在保证数据传输的安全性和效率的同时,可以提高开发效率,减轻开发难度。 通信协议的使用 前后端通信协议的使用需要根据需求进行选择和配置,通常需要考虑数据传输的安全性、数据传输的效率、通信的响应速度等因素。对于数据传输比较频繁、要求实时响应的场景,可以选择WebSocket协议;对于数据传输量较小、安全性要求较高的场景,可以选择HTTP协议;对于需要跨平台进行数据传输的场景,RPC协议则是一个不错的选择。 总之,前后端通信协议是前后端交互的关键,选择合适的通信协议,能够提升开发效率,减轻开发难度,也能够为用户带来更好的体验和效果。
机器人的通讯协议《机器人通讯协议》一、前言为了实现机器人之间的有效通讯,确保机器人协作的高效性和准确性,本文档规定了一种机器人通讯协议。
该协议涵盖了机器人之间基本的消息格式、通讯方式和错误处理等方面,适用于各种类型的机器人。
二、消息格式1. 消息类型:分为请求、响应、通知三种类型。
2. 消息结构:每条消息由消息头和消息体组成。
(1)消息头:包含版本号、消息长度、消息类型、目标机器人ID等基本信息。
(2)消息体:根据消息类型,包含相应的内容。
例如,请求消息体中包含请求命令和参数,响应消息体中包含执行结果和状态码。
三、通讯方式1. 基于TCP/IP协议:采用可靠的传输控制协议(TCP)进行通讯,确保数据的完整性和准确性。
2. 基于主题的消息队列:机器人之间通过消息队列进行通讯,每个主题对应一个消息队列。
机器人订阅感兴趣的主题,发送消息时指定目标主题。
3. 定时心跳:机器人之间通过发送心跳包来维持连接,检测对方是否在线。
四、错误处理1. 校验错误:消息在传输过程中,若发现数据校验失败,则丢弃该消息,并重新发送。
2. 消息格式错误:接收方在解析消息时,若发现消息格式不符合协议要求,则返回错误响应,并终止通讯。
3. 命令错误:执行方在处理请求时,若发现请求命令不符合要求,则返回错误响应,并终止通讯。
4. 权限错误:接收方在处理请求时,若发现请求方无权限执行该操作,则返回错误响应,并终止通讯。
五、协议版本迭代本协议可根据需求进行版本迭代,每次迭代需遵循以下规则:1. 在原有协议基础上,增加新的消息类型、字段或功能。
2. 保持消息格式和通讯方式的兼容性,以便旧版本机器人能与新版本机器人进行通讯。
3. 在新版本协议中,保留旧版本协议的支持,以便实现向下兼容。
六、总结《机器人通讯协议》为机器人之间的通讯提供了统一的标准和规范,有助于提高机器人协作的效率和稳定性。
在使用本协议时,请注意遵循相关规定,确保机器人之间的安全、可靠通讯。
智能变送器通讯协议书甲方(供应商):_____________________乙方(采购方):_____________________鉴于甲方为智能变送器的供应商,乙方为智能变送器的采购方,双方在平等自愿的基础上,就智能变送器通讯协议达成如下协议:第一条协议目的本协议旨在明确甲乙双方在智能变送器通讯过程中的权利、义务和责任,确保智能变送器通讯的顺利进行和双方利益的保护。
第二条智能变送器通讯定义智能变送器通讯指通过电子方式,将智能变送器的数据信息传输至乙方指定的接收系统,实现数据的实时监控和分析。
第三条通讯协议标准1. 甲方提供的智能变送器必须符合国家标准或行业标准,具备稳定的通讯功能。
2. 通讯协议应遵循国际通用的通讯协议,如Modbus、HART等。
3. 甲方应提供详细的通讯协议文档,包括通讯接口、数据格式、通讯速率等技术参数。
第四条甲方的责任和义务1. 甲方负责提供符合本协议要求的智能变送器,并确保其通讯功能的正常运行。
2. 甲方应提供必要的技术支持,协助乙方完成智能变送器的安装、调试和通讯设置。
3. 甲方应保证智能变送器通讯的安全性,防止数据泄露或被非法访问。
第五条乙方的责任和义务1. 乙方应按照甲方提供的通讯协议文档,正确设置和使用智能变送器。
2. 乙方应确保接收系统的稳定性和安全性,防止数据丢失或被非法访问。
3. 乙方应定期对智能变送器进行维护和检查,确保其通讯功能的正常运行。
第六条通讯故障处理1. 如出现通讯故障,甲方应在接到乙方通知后24小时内响应,并提供解决方案。
2. 双方应共同分析通讯故障原因,甲方应根据故障原因提供相应的技术支持或更换设备。
第七条保密条款1. 双方应对本协议内容及在履行本协议过程中获得的商业秘密和技术秘密负有保密责任。
2. 未经对方书面同意,任何一方不得向第三方披露本协议内容及相关信息。
第八条违约责任1. 如一方违反本协议的任何条款,应承担违约责任,并赔偿对方因此遭受的损失。
文档编号THJS-TXXY-0003文档名称智能模块通讯规约-Modbus协议拟制审核批准版本修订历史记录版本改版日期改版说明拟制审核批准1.0 2009-6-20 创建智能模块通讯规约-Modbus协议一、概述本文描述了电源模块数据上报的Modbus通讯规约标准,应用于电源模块向上级监控设备上报数据时的通讯规约。
二、适用范围规约适用于石家庄通合电子有限公司开发的电源模块与Modbus协议的监控器之间进行串行通信,是开发、测试Modbus协议模块通讯软件的依据。
三、物理接口RS485,波特率9600,字符格式采用奇校验位、8位数据位、1位停止位(N81)的异步串行通讯格式。
四、信息帧格式1、信息帧结构8Bit地址8Bit功能码nX8Bit数据16BitCRC校验码说明:采用Modbus规约的RTU(Remote Terminal Unit)远程终端设备方式,每个字节以2个十六进制数,有效的数据范围为0~9,A~F。
2、信息帧注解1)地址:指电源模块的地址,范围:0~31;2)功能码:电源模块只支持功能码03(读数据)、06(设置数据),特殊命令功能码:16(读过欠压、校准值)、17(设置校准值);3)数据:上报或下设的数据,按寄存器(数据地址)进行发送,每一个寄存器由两个字节组成,关于寄存器号的定义,请参阅附录A。
4)CRC校验码:CRC(Cyclical Redundancy Check)对地址、功能码和数据进行校验,由两字节组成,CRC由传输设备生成,附加在数据帧中,如果由接收到数据计算出来的校验和与附加在数据后的校验和不一致,则有错误发生。
关于CRC生成函数,请参阅附录B内容。
五、命令格式1、查询数据,功能码03上位机发送数据查询命令信息帧,模块接收到正确的查询命令后,对命令进行响应回送数据给上位机。
查询命令帧格式如下:字段值字段说明01 地址103 功能码300 起始地址高字节起始地址低字节,起始地址00000 数据个数高字节数据个数低字节,读3个数据03CRCHi CRC高字节CRC低字节CRCLo模块响应帧格式:字段值字段说明01 地址103 功能码306 应答数据字节数D0Hi 第1个数据高字节第1个数据低字节D0LoD1Hi 第2个数据高字节第2个数据低字节D1LoD2Hi 第3个数据高字节第3个数据低字节D2LoCRCHi CRC高字节CRCLo CRC低字节2、设置数据,功能码06上位机发送设置数据查询命令和设置据,模块接收到正确的设置命令后,将指定的数据设置成命令帧中携带的数据,并将数据原样返回进行响应,若设置不成功时,不应答。
仪器通信协议仪器通信协议是用于规范仪器与计算机之间数据交换的标准,其体系结构主要包含物理层、数据链路层、网络层、传输层和应用层。
物理层物理层是仪器通信协议的最底层,主要负责传输比特流。
它定义了通信链路的机械、电气、功能和定时特性,以确保比特流的正确传输。
物理层协议规定了连接、传输和断开连接的方式,以及比特流的同步和错误控制方式。
常见的物理层协议包括RS-232、RS-485和USB等。
数据链路层数据链路层负责将比特流组合成帧,并在通信链路上发送和接收帧。
它定义了帧的格式和结构,以及帧的传输顺序和错误控制方式。
数据链路层还提供了流量控制功能,以确保数据的可靠传输。
常见的数据链路层协议包括以太网和Wi-Fi等。
网络层网络层负责将数据从源地址发送到目的地址。
它通过路由选择算法确定最佳路径,并建立和维护通信链路。
网络层还提供了拥塞控制和差错控制功能,以确保数据的可靠传输。
常见的网络层协议包括IP、ARP和ICMP等。
传输层传输层负责将数据分段并发送到目标主机。
它提供了端到端的通信服务,并确保数据的顺序和完整性。
传输层还提供了流量控制和差错控制功能,以确保数据的可靠传输。
常见的传输层协议包括TCP和UDP等。
应用层应用层负责提供应用程序之间的通信服务。
它定义了应用程序之间的通信协议,并提供了一组通用的应用程序接口。
应用层协议根据具体的应用需求而有所不同,但通常包括文件传输、电子邮件和Web浏览等功能。
常见的应用层协议包括HTTP、FTP和SMTP等。
总之,仪器通信协议是一个完整的体系结构,涵盖了从物理层到应用层的各个方面。
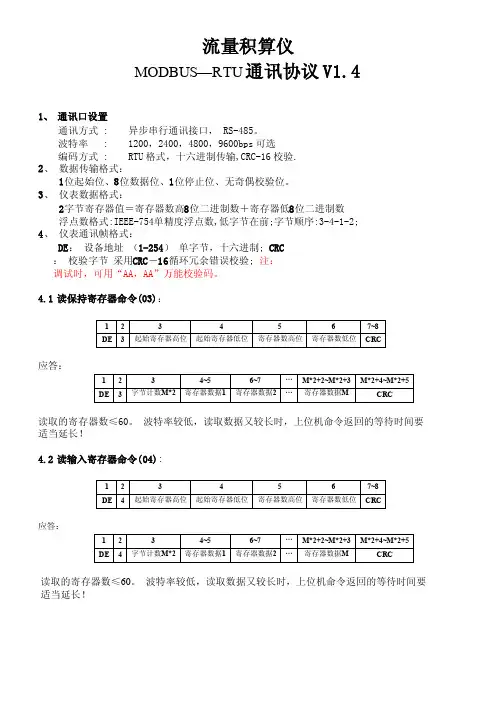
流量积算仪MODBUS—RTU 通讯协议V1.41、通讯口设置通讯方式 : 异步串行通讯接口, RS-485。
波特率: 1200,2400,4800,9600bps 可选编码方式 : RTU 格式,十六进制传输,CRC-16 校验.2、数据传输格式:1位起始位、8位数据位、1位停止位、无奇偶校验位。
3、仪表数据格式:2字节寄存器值=寄存器数高8位二进制数+寄存器低8位二进制数浮点数格式:IEEE-754单精度浮点数,低字节在前;字节顺序:3-4-1-2;4、仪表通讯帧格式:DE:设备地址(1-254)单字节,十六进制; CRC:校验字节采用CRC-16循环冗余错误校验; 注:调试时,可用“AA,AA”万能校验码。
4.1 读保持寄存器命令(03):应答:读取的寄存器数≤60。
波特率较低,读取数据又较长时,上位机命令返回的等待时间要适当延长!4.2 读输入寄存器命令(04):应答:读取的寄存器数≤60。
波特率较低,读取数据又较长时,上位机命令返回的等待时间要适当延长!4.3 修改多个输入寄存器命令(10H),需设置密码确认应答:4.4 修改单个输入寄存器命令(06),需设置密码确认:应答:写入的寄存器数≤30。
波特率较低,写入数据又较长时,上位机命令返回的等待时间要适当延长!4.5 充值命令(复合命令):(1)写入四字节充值密码和客户编号;01 10 00 00 00 03 06 00 XX XX XX YY YY AA AA 表号命令起始寄存寄存器字节四字节密码两字节两字节器地址个数个数最高位为00 客户编号CRC校验码成功反馈:01 10 00 00 00 03 AA AA(2)写入充值数量;01 10 00 06 00 02 04 XX XX XX XX AA AA 表号命令起始寄存寄存器字节四字节充值数量, 压缩BCD码两字节器地址个数个数前三位为整数,后一位为小数CRC校验码成功反馈:01 10 00 06 00 02 AA AA(3)写充值命令01 06 00 03 00 10 AA AA表号命令寄存器两字节两字节地址数据校验码成功反馈:01 06 00 03 00 10 AA AA4.6 维护命令(复合命令):(1)写入四字节充值密码和客户编号;01 10 00 00 00 03 06 00 XX XX XX YY YY AA AA表号命令起始寄存寄存器字节四字节密码两字节两字节器地址个数个数最高位为00 客户编号CRC校验码成功反馈:01 10 00 00 00 03 AA AA(2)写维护命令;01 06 00 03 00 XX AA AA表号命令寄存器两字节两字节地址数据校验码成功反馈:01 06 00 03 00 XX AA AA命令XX定义:01:进入维护状态;02:退出维护状态;03:复位非法操作。
KNX协议详解建筑自动化通信的标准协议随着科技的不断发展,建筑自动化已经成为现代建筑设计中不可或缺的一部分。
为了实现建筑内各种设备之间的智能联动和远程控制,一个可靠的通信协议是必不可少的。
KNX协议便是在这个背景下诞生的,它成为了建筑自动化领域中最重要和最广泛使用的标准协议之一。
一、KNX协议的背景和发展KNX协议最初由三个不同的自动化公司独立开发,分别是德国的EIB(欧美联邦自动化协议)、法国的EIB和瑞典的IBS。
随着时间的推移,这三个协议逐渐合并并最终发展成现在我们所熟知的KNX协议。
KNX协议于1990年首次发布,并在之后的几年中得到了不断完善和推广,至今已有数百家不同的供应商和成千上万个应用案例。
二、KNX协议的特点和优势1. 可靠性:KNX协议基于统一的标准和协议体系,确保了各种设备之间的兼容性和稳定性。
无论是传感器、执行器还是控制面板,都可以通过KNX协议进行连接和通信,实现各个设备间的无缝协同工作。
2. 灵活性:KNX协议支持多种物理介质,包括电力线、无线、红外和以太网等,可以根据实际需求选择合适的通信方式。
同时,KNX协议也支持多种传输方式,包括组播、广播和点对点通信,满足不同场景下的通信需求。
3. 可扩展性:KNX协议具有良好的可扩展性,可以轻松地集成新的设备和功能。
无论是新建工程还是旧楼改造,只要符合KNX协议标准,都可以方便地加入到已有的建筑自动化系统中。
4. 开放性:KNX协议是一个开放的标准,任何感兴趣的厂商和开发者都可以加入到KNX协议联盟中,共同参与协议的发展和规范的制定。
这种开放性使得KNX协议能够不断吸纳新的技术和创新,保持与时俱进。
5. 安全性:KNX协议对数据传输进行了有效的加密和认证,确保了通信数据的安全性和私密性。
无论是在家庭环境、商业办公室还是公共场所,KNX协议都能够提供可靠的安全保障。
三、KNX协议的应用领域KNX协议在各种建筑自动化应用中都得到了广泛应用,下面是一些常见的应用领域:1. 照明控制:通过KNX协议,可以实现灯光的远程控制和定时调节,提高能源利用效率和舒适性。
自动化通讯协议一、概述自动化通讯协议是指在自动化控制系统中,用于规定不同设备或系统之间通讯数据格式和规则的约定。
通过自动化通讯协议,不同厂家生产的设备可以实现数据交换和信息共享,从而实现系统集成和协同工作。
二、常见自动化通讯协议1. Modbus协议Modbus是一种串行通讯协议,常用于工业自动化领域。
它包括了Modbus RTU、Modbus ASCII和Modbus TCP三种变种,适用于不同的通讯场景。
2. Profinet协议Profinet是一种高性能工业以太网协议,支持实时通讯和网络管理功能。
它广泛应用于自动化生产线和工业控制系统中。
3. OPC协议OPC(OLE for Process Control)是一种基于微软技术的开放式通讯协议,用于实现不同厂家生产的自动化设备之间的数据交换。
4. CAN协议CAN(Controller Area Network)是一种现场总线通讯协议,常用于汽车电子控制系统和工业控制领域。
5. Ethernet/IP协议Ethernet/IP是基于以太网的工业控制网络协议,支持实时数据交换和设备之间的通讯。
三、自动化通讯协议的优势1. 提高生产效率通过自动化通讯协议,不同设备之间可以快速、准确地交换数据,实现信息共享和协同工作,提高生产效率。
2. 降低系统成本采用标准的自动化通讯协议,可以有效降低系统集成和维护成本,提高设备的可靠性和稳定性。
3. 提升生产质量自动化通讯协议可以实现数据的实时监测和控制,及时发现和纠正生产过程中的问题,提升产品质量。
4. 促进信息化建设自动化通讯协议将设备和系统连接起来,实现全面信息化管理和控制,为企业的智能制造和数字化转型提供重要支撑。
四、自动化通讯协议在工业应用中的案例1. 某汽车生产线上,采用Profinet协议实现生产设备之间的实时数据交换和监控,从而提高了生产线的自动化水平和生产效率。
2. 某化工企业引入了Modbus TCP协议,实现了生产过程中不同控制系统之间的数据共享,提高了生产质量和效率。
智能门锁常用的无线通信协议详解智能门锁是近年来随着物联网技术的发展而逐渐普及的一种新型门锁。
它采用了多种无线通讯协议,实现了数据的无线传输和控制指令的传递,为用户提供了更加便捷和安全的门锁控制方式。
本文会详细的介绍智能门锁的无线通讯协议有哪些?这些通信协议主要特点是什么?协议的工作原理是什么?一、智能门锁的无线通讯协议智能门锁的无线通讯协议主要有蓝牙、ZigBee和Wi-Fi等。
这些无线通讯协议的应用,使得智能门锁无需布线,可以在一定范围内实现无线连接和数据传输。
蓝牙:蓝牙是一种支持短距离无线通信的协议,具有低功耗、低成本的特点,适用于移动设备之间的数据传输和连接。
智能门锁通过蓝牙模块与用户的手机等设备进行数据交互,接收控制指令并执行相应的操作。
Wi-Fi:Wi-Fi是一种基于无线局域网的无线通信协议,可以快速传输数据,并支持互联网连接。
智能门锁可以通过Wi-Fi模块与用户的手机等设备进行数据交互,接收控制指令并执行相应的操作。
ZigBee:ZigBee是一种低功耗、低成本的无线通信协议,适用于大量传感器和设备的无线组网,主要应用于智能家居和工业自动化领域。
智能门锁通过ZigBee 模块与其他设备之间进行数据的交互和控制指令的传递。
二、智能门锁无线通讯协议的主要特点智能门锁的无线通讯协议具有以下主要特点:无线连接:智能门锁通过无线通讯协议实现与其他设备的无线连接,无需布线,具有较高的灵活性和可移动性。
远程控制:用户可以通过手机等设备远程控制智能门锁的开关,实现便捷的访问和控制。
身份识别:智能门锁可以通过身份识别功能,例如通过指纹识别、密码识别等方式来验证用户的身份,确保安全性和可靠性。
安全性:智能门锁的无线通讯协议采用加密技术,确保数据的传输安全性和隐私保护。
低功耗:智能门锁的无线通讯协议采用低功耗技术,延长了设备的使用时间。
低成本:智能门锁的无线通讯协议采用低成本技术,降低了产品的生产成本,提高了产品的竞争力。
2023精选智能家居通讯协议1. 引言智能家居是指通过物联网技术将各种家居设备与互联网连接,实现远程控制和自动化管理的家居系统。
为了使不同厂商生产的智能家居设备能够互相通信和协同工作,需要制定统一的通信协议。
本文将介绍2023年精选的智能家居通讯协议。
2. 背景传统的智能家居设备通常采用不同的通信协议,导致设备之间无法互相通信和共享数据。
这给用户带来了使用上的不便,也限制了智能家居系统的扩展性和互操作性。
为了解决这一问题,制定统一的智能家居通信协议成为了当务之急。
3. 目标•提供统一的通信协议,使不同厂商的智能家居设备能够互相通信和协同工作;•支持各种智能家居设备的远程控制和自动化管理;•提供安全可靠的通信机制,防止信息泄露和攻击。
4. 协议架构2023年精选的智能家居通讯协议采用分层架构,如下所示:•应用层:提供智能家居应用程序的接口,支持设备发现、设备控制、场景设置等功能。
•传输层:提供可靠的数据传输机制,支持数据加密和解密。
•网络层:负责处理设备之间的路由和寻址问题,支持多种网络协议,如Wi-Fi、蓝牙等。
•物理层:提供物理接口,将数据从设备传输到网络。
5. 协议特性5.1 互操作性协议要求各个厂商的智能家居设备必须遵守统一的通信协议,并能够相互通信和协同工作。
这使得用户可以根据自己的需求选择不同厂商的设备,而不用担心兼容性问题。
5.2 安全性协议要求通信过程中的数据必须经过加密处理,防止信息泄露和非法访问。
同时,各个设备需要提供安全认证功能,确保只有授权用户才能对设备进行控制操作。
5.3 灵活性协议要求支持各种智能家居设备的控制和管理,包括灯光、电器、安防等。
同时,协议还要支持设备的远程控制和自动化管理,用户可以通过方式、平板等终端对家居设备进行远程控制。
6. 部署方案•各大智能家居设备厂商积极采用该协议,将其应用于自己的产品中;•设立相关的标准化组织,推广该协议并确保其标准化和规范化;•加强与网络运营商的合作,推动其将该协议支持纳入其网络设备中。
PLC通讯协议1. 简介PLC通讯协议是指用于编程逻辑控制器(PLC)与其他设备(如PC、传感器、执行器等)进行通信的一种规定的通信规约。
PLC通讯协议在工业自动化领域具有重要的作用,它能够实现PLC与其他设备之间的数据交换,使得整个系统能够实现高效的运行和控制。
2. 常用的PLC通讯协议以下是一些常用的PLC通讯协议:1.Modbus:Modbus协议是一种使用最广泛的PLC通讯协议,它采用RTU(Remote Terminal Unit)或ASCII(American Standard Code for Information Interchange)格式进行通信。
Modbus协议能够实现点对点通信以及多点通信,在工控领域应用广泛。
2.PROFIBUS:PROFIBUS(Process Field Bus)是一种实时通信协议,它广泛应用于工业自动化系统中。
PROFIBUS通讯协议具有高速传输、可靠性强、支持多个设备等优点,适用于大规模和复杂的控制系统。
3.EtherNet/IP:EtherNet/IP是一种基于以太网的工业自动化网络协议,它提供了高速、可靠的数据传输以及广泛的设备支持。
EtherNet/IP通讯协议广泛应用于工业自动化系统中,具备灵活性和可扩展性。
4.DeviceNet:DeviceNet是一种多主从式工业网络协议,它主要用于控制和传感器设备之间的通信。
DeviceNet通讯协议采用CAN (Controller Area Network)总线,具有高速传输、可靠性强、扩展性好等特点。
3. PLC通讯协议的特点和优势PLC通讯协议具有如下特点和优势:•可靠性强:PLC通讯协议在设计上充分考虑到了实时性和可靠性的需求,保证了数据的传输准确性和稳定性,从而满足工业自动化系统的要求。
•通信速度快:PLC通讯协议采用了高效的数据传输方式,能够实现快速的数据交换和实时控制,提高了生产线的效率和工作速度。
智能卡通讯协议篇一:通信协议论文:智能卡T=1通信协议的分析与实现通信协议论文:智能卡T=1通信协议的分析与实现【中文摘要】智能卡的英文名字为“Smartcard”,又称集成电路卡,即IC卡(Integrated Circuit card),是在塑料基片中镶嵌一个集成电路芯片并封装成卡的形式。
它以体积小、集成电路芯片技术先进以及保密措施特殊和无法被破译及仿造的特点被大众所接受。
智能卡应用到的国际标准包括以下几个方面:1.物理特性:ISO7816:1987;ISO7813;ISO7816-1:1987。
2.触点尺寸与位置:ISO/IEC 7816-2:1988。
3.电信号与传输协议:ISO/IEC 7816-3:1997。
4.行业间交换用指令:ISO/IEC 7816-4:1994。
5.应用标识符的编号系统和注册过程:ISO/IEC 7816-5:1994。
本文的主要是分析和实现智能卡底层通信协议。
智能卡通信协议常用的有两种:T=0和T=1通信协议。
由于T=0协议存在检错机制不完善、数据泄漏等诸多不足,因此本文主要讨论接触式智能卡中的T=1异步半双工块传输通信协议。
本文分析智能卡的工作流程,异步传输复位应答(ATR)的构成及内容,协议类型选择(PPS)对传输参数的修改,块帧...【英文摘要】Analysis and Implementation of ProtocolT=1 in Smart CardsThe English name for the smart card Smartcard, also known as IC cards, IC card (Integrated Circuit card), is embedded in the plastic base film, and packaged into a single integrated circuit chip card form. It small size integrated circuit chip technology and advanced and special securitymeasures can not be deciphered, and copy features are accepted by the public.Smart card applications to the international standards include the following:...【关键词】通信协议智能卡 T=1协议【英文关键词】munication protocol smart cards Protocol T=1【目录】智能卡T=1通信协议的分析与实现4-6ABSTRACT6-7摘要1.1 T=1第1章绪论10-12异步半双工块传输通信协议概述10-11分类10绍1112-1312-1313-201.1.2 T=0 协议介绍10-111.2 论文的主要工作11-122.1 智能卡简介121.1.1 数据传输协议1.1.3 T=1 协议介第2章智能卡系统2.2 智能卡操作系统第3章 T=1 异步半双工块传输通信协议分析3.1 智能卡的数据传输13-143.1.1 数据传输的物理规程1313-143.1.2 数据传输的初始流程13-143.1.2.2 协议3.2.1 数3.1.2.1 复位应答(ATR)类型选择(PPS)14据链路层14-1615-16(EDC)163.2 T=1 传输协议14-183.2.1.1 块帧14-153.2.1.2 起始域3.2.1.4 终止域3.2.2.1 字符等待时3.2.33.2.1.3 信息域(INF)163.2.2 等待时间16-17间(CWT)16-173.2.2.2 字组等待时间(BWT)173.2.4 无差错操作发送和接收序列计数器1717-1818-20APDU19-2020-4720-23统21-2323--25程25-283.2.5 差错处理183.3.1 命令APDU18-193.3 协议报文结构(APDU)3.3.2 应答第4章 T=1 异步半双工块传输通信协议实现4.1 系统结构及模块划分20-254.1.1 概述4.1.1.2 通信子系4.1.1.1 智能卡系统20-214.1.2 接收模块234.1.4 协议初始化模块244.1.6 重传模块244.1.8 计数器模块244.2 系统处理流程设计4.1.3 发送模块4.1.5 协议设置模块4.1.7 同步模块4.1.9 校验码模块25-394.2.1 主守护流4.2.3 信息块4.2.2 PPS 处理流程28-3030-32(I-Block)处理流程理流程32-3434-3934-3636-3838-394.2.4 接收确认块(R-Block)处4.2.5 系统块(S-Block)处理流程4.2.5.1 卡信息域尺寸确定(IFSC)4.2.5.2 接口设备信息域尺寸确定(IFSD)4.2.5.3 再同步(Resynchronization)4.3 特殊问题的解决方法39-4039-414.3.1 发送与接收计数器的实现40-414.3.2 发送与接收状态位的改变41-474.4.1 无差错操4.4 系统实现功能测试41-43作协议准则测试用例例43-47文献49-514.4.2 差错处理协议准则测试用附录48-49参考第5章结束语47-48简介及在学期间所取得的科研成果51-52致谢52篇二:CPU卡中T0通讯协议的分析与实现CPU卡中T=0通讯协议的分析与实现发布: 2011-4-29 14:09 | : —— | 来源: 21ICTAG: CPU 芯片IC卡的应用越来越广泛,从存储卡到逻辑加密卡,目前CPU 卡已经逐渐在应用中占据主导地位。
通导设备常用的通讯协议
通导设备常用的通讯协议有以下几种:
1. Modbus:是一种串行通讯协议,主要用于工业领域中的设备之间的通讯。
它具有简单的结构和广泛的应用场景。
2. CAN(Controller Area Network):是一种面向实时应用的串行通讯协议,广泛应用于汽车电子领域和工业现场总线系统中。
3. Ethernet:是一种常用的局域网通讯协议,用于设备之间的通讯连接。
它具有高速传输和广域覆盖的特点。
4. Profibus(Process Field Bus):是一种工业通讯总线系统,适用于自动化控制领域中的设备之间的通讯。
5. HART(Highway Addressable Remote Transducer):是一种数字通信协议,用于工业领域中的智能传感器和执行器之间的通讯。
6. OPC(OLE for Process Control):是一种标准化的工业通讯协议,用于实现不同厂家的设备之间的数据交换和共享。
7. MQTT(Message Queuing Telemetry Transport):是一种轻量级的发布/订阅消息传输协议,适用于物联网设备之间的通讯。
8. Zigbee:是一种低功耗的无线通信协议,用于物联网设备之间的短距离通讯。
需要根据具体的设备类型和应用场景选择合适的通讯协议。
plc通讯协议有哪些PLC通讯协议有哪些。
PLC(Programmable Logic Controller,可编程逻辑控制器)是工业自动化控制系统中的关键设备,它能够控制各种生产设备和机器,实现自动化生产。
而PLC通讯协议则是PLC与其他设备(如人机界面、传感器、执行器等)之间进行通讯和数据交换所采用的规约和标准。
不同的厂家和设备之间通常采用不同的通讯协议,因此了解各种PLC通讯协议对于工程师和技术人员来说至关重要。
1. Modbus。
Modbus是一种串行通讯协议,最初由Modicon公司开发,现已成为工业领域中最常用的通讯协议之一。
Modbus协议简单、易于实现,支持RTU和ASCII两种传输模式,适用于各种不同的硬件设备。
它常用于PLC与上位机、传感器、执行器等设备之间的数据交换。
2. Profibus。
Profibus是一种用于工业自动化领域的现场总线通讯协议,由德国西门子公司开发。
它采用了现代的通讯技术,支持高速数据传输和实时控制,适用于复杂的自动化系统。
Profibus广泛应用于工业控制领域,特别是在制造业和过程工业中得到了广泛的应用。
3. Ethernet/IP。
Ethernet/IP是一种基于以太网的工业通讯协议,由美国罗克韦尔自动化公司开发。
它结合了以太网和工业协议的优势,支持实时控制和数据传输,适用于大型工业控制系统。
Ethernet/IP协议的使用不仅简化了工业网络的布线和配置,还提高了网络的可靠性和稳定性。
4. Profinet。
Profinet是一种基于以太网的工业以太网通讯协议,由德国西门子公司开发。
它支持高速数据传输和实时控制,并具有灵活的网络拓扑结构,适用于复杂的工业自动化系统。
Profinet协议的广泛应用使得工程师可以更加灵活地设计和配置工业控制网络。
5. DeviceNet。
DeviceNet是一种用于工业自动化领域的现场总线通讯协议,由美国罗克韦尔自动化公司开发。
1 KELONG Powersoft 交流电源监控管理系统 前端智能设备通讯协议 2 一、总则: 本文规定了为实现集中监控管理而使用的电源设备产品在设计、制造中应遵循的通讯协议。本通讯协议适用于科华公司设计、生产的前端智能电源设备和在这些设备的基础上构成的不同规模的监控系统。
二、物理层: 2.1、串行通讯口采用特殊脚位定义的RS232接口。 该接口机械结构和电气特性均按国际标准RS232接口定义。
其管脚定义如下: a、UPS端的脚位定义为: 6脚 通讯接收脚(RXD) 7脚 通讯地(GND) 9脚 通讯发送脚(TXD)
b、电脑端 脚位按标准RS232定义。 5 4 3 2 1 1 2 3 4 5 9 8 7 6 6 7 8 9
M2502通讯电缆线 UPS端(9芯针式) 电脑端(9芯孔式)
2.2、数据传输方式: 串行异步传输 起始位1位 数据位8位(低位在前) 停止位1位 无校验。
2.3、通讯口数据传输速率为 2400 bit/s 2.4、采用主从式的工作方式,上位机呼叫机内监控单元并下发命令,等待 下位机应答。若无应答或应答为无效命令,则进行下一次呼叫;若连 续10秒无应答,则认为通讯链路中断。 UPS内的监控单元在接收到上位机的请求命令后,对命令进行判断并 作出正确的响应。 3
三、信息类型及协议的基本格式: 3.1、信息类型: 1、遥测模拟量信号: 协议中对UPS内部的模拟量信息检测了包括 输入市电电压(110V、220V 两档)、输出工作电压(110V、220V 两档)、电池剩余容量、负载百分比、环境温度和输入市电频率在内的六项基本工作参数。 其中电池剩余容量的检测是将当前UPS内部电池电压以电压值的形式送达上位机,通过上位机将这一值简化的与额定值正比成容量百分比。
2、遥测开关量信息: 市电电压正常( L) / 异常( H) 电池电压正常( L) / 低电压( H) Bypass( H) / boot( L)或Buck Active UPS 正常( L) / 故障( H) UPS为在线式( L) / 后备式( H) UPS 普通工作( L) / 测试工作 状态( H) UPS 开( L) / 关( H)机状态 蜂鸣器 关( L) / 开( H)
3、遥信基础信息: 厂家名称 UPS型号 版本号 额定电压 额定电流 额定电池电压
4、遥控开关量: 定时开/关机 UPS测试放电 蜂鸣器开/关 4
3.2、通讯格式: 所有的通讯过程都是按:上位机发工作请求,UPS内的通讯模块在接收到请求后,对其作出相应的响应 的工作模式来进行。
3.2.1、 UPS状态查询请求: 该请求作为遥测UPS内部六项模拟量和8个开关量的主请求,每隔1秒钟发送一次,并在这之后等待UPS的响应。
格式: Computer: Q1 UPS: (MMM.M NNN.N PPP.P QQQ RRR.R S.SS TT.T b7b6b5b4b3b2b1b0
状态信息描述:[ 每个量之间都有一个空格符 ] a、 起始字符:( 28H
b、 输入电压(I/P voltage):MMM.M M 为0~9的整数,状态量单位为 Vac。
c、 输入故障电压(I/P fault voltage):NNN.N N 为0~9的整数,状态量单位为 Vac。
** 对后备式UPS而言 ** 目的是为了标识引起后备式UPS转入逆变模式的瞬间毛刺电压。如有电压瞬变发生,输入电压将在电压瞬变前、后一个查询保持正常。I/P异常电压将把瞬变电压保持到下一个查询。查询完成后,I/P异常电压将与I/P电压保持一致,直到发生新的瞬变。
** 对在线式UPS而言 ** 目的是为了标识引起在线式UPS转入电池供电模式的短时输入异常。如有电压瞬变发生,输入电压将在电压瞬变前、后一个查询保持正常。I/P异常电压将把瞬变电压保持到下一个查询。查询完成后,I/P异常电压将与I/P电压保持一致,直到发生新的瞬变。
d、 输出电压(O/P voltage):PPP.P P 为0~9的整数,状态量单位为 Vac。
e、 输出电流(O/P current):QQQ QQQ 是一个相对于最大允许电流的百分比,不是一个绝对值。
f、 输入频率(I/P frequency):RR.R R 为0~9的整数,状态量单位为 Hz。 5
g、 电池电压(Battery voltage):SS.S或S.SS S 为0~9的整数。 对在线式单体电池电压显示方式为S.SS Vdc 对后备式总电池电压显示方式为SS.S Vdc ( UPS类型将在UPS状态信息中获得 )
h、 环境温度(Temperature):TT.T T 为0~9的整数,单位为 C。
i、 UPS开关量状态: 是以二进制数位表示法:,并以ASCII码单位传输的一个状态量。
b7:1表示 市电电压异常 b6:1表示 电池低电压 b5:1表示 Bypass或Buck Active b4:1表示 UPS故障 b3:1表示 UPS为后备式(0表示在线式) b2:1表示 测试中 b1:1表示 关机有效 b0:1表示 蜂鸣器开
例: 为 00001001 B ,在发送时则为:30H 30H 30H 30H 31H 30H 30H 31H j、停止位: 0DH
3.2.2、 测试10秒钟: 格式: Computer: T UPS: 测试10秒钟后返回市电供电
此时的市电正常。若在测试中发生电池低电压,则立即返回市电供电。 3.2.3、 测试到电池欠压: 格式: Computer: TL UPS: 测试到电池低电压后返回市电供电 6
3.2.4、 测试规定的时间: 格式: Computer: T UPS: 测试分钟
若在测试中发生电池低电压,则立即返回市电供电。 的范围为01~99分钟
3.2.5、开/关蜂鸣器 格式: Computer: Q UPS无应答,仅将当前的蜂鸣器工作状态翻转。
当市电中断时,UPS会通过蜂鸣器给管理人员一个告警信息。管理人员 可用这条命令控制蜂鸣器是否鸣叫。但当UPS发生任何一种异常现象时, 蜂鸣器都将自动打开,
3.2.6、关机命令: 格式: Computer: S UPS无应答,但输出在分钟后关闭
a、若输入电压保持异常,UPS的分钟后关闭。 b、若在分钟内电池低电压,UPS的输出将立即关闭。 c、UPS关机后,仍监视市电电压。若市电恢复,UPS延时10秒后将市 电输出。 d、的范围是从.2 ,.3,,01,02,up to 10 ,单位为分钟。
3.2.7、关机后又开机命令: 格式: Computer: SR UPS: UPS在分钟后关闭,并在后重新开启。
a、关机顺序与前面的相同。 若分钟的开机计时到后市电未恢复,则要等到市电恢复后在开机。 b、UPS处在关机延时中时,应能接受“C”命令取消关机。 c、UPS处在开机延时中时,“C”命令应能让UPS延时10秒后开机(市 电正常) d、的范围为.2,.3,01,02, ,up to 10 7
e、的范围为0001到9999 3.2.8、取消关机命令:
格式: Computer: C UPS: 取消所有的关机命令
a、UPS处在关机延时中时,接受“C”命令取消关机。 b、UPS处在开机延时中时,“C”命令能让UPS延时10秒后开机(市电 正常)
3.2.9、取消测试命令: 格式: Computer: CT UPS: 取消所有的测试命令
3.2.10、遥信UPS厂家信息命令: 格式: Computer: I UPS: #Company_Name UPS_Model Version
这个功能是使UPS能回答基本的生产厂家信息:谁生产的UPS;UPS的 型号名;UPS的版本信息。
每个信息段的格式如下: Company_Name:15字符,不足填空格号 UPS_Mode: 10字符,不足填空格号 Version: 10字符,不足填空格号 每个信息段的之间有一个空格符。
3.2.11、遥信UPS额定值信息: 格式: Computer: F UPS: #MMM.M QQQ SS.SS RR.R 这个功能是使UPS能回答额定值信息。每个信息段的之间有一个空格符。
信息段格式定义如下: 额定电压:MMM.M 额定电流:QQQ 电池电压:SS.SS或SSS.S 额定频率:RR.R