通用二维平台说明书
- 格式:doc
- 大小:650.13 KB
- 文档页数:19
顶码商超王系列X7808二维方形大平台用户手册顶码(深圳)科技有限公司版本记录目录恢复默认设置 (1)用户默认设置 (2)系统设置 (3)休眠-关闭补光 (5)相同条码读取 (7)屏蔽QR 网页条码 (9)输出模式 (10)USB 键盘口 (10)USB 虚拟串口 (11)串口 (12)串口波特率 (13)只开启一维码 (15)只开启一维码 (16)UPC A (17)UPC E (23)EAN 8 (29)EAN 13 (34)Code 128 / GS1 -128 (40)Code 39 (41)Code 93 (45)Codabar (46)Plessey (49)MSI Plessey (50)Interleaved 2 of 5 (54)Pharmacode (56)PDF417 (57)Micro PDF417 (58)Data Matrix (59)QR (62)QR- GB2312 简体中文键盘输出 (65)Micro QR (67)解码长度设置 (68)•限制单一长度 (68)•限制长度范围 (69)•任意长度 (69)Code 128 解码长度设置 (70)Code 39 解码长度设置 (71)Codabar 解码长度设置 (73)Interleaved 2 of 5 解码长度设置 (74)MSI Plessey 解码长度设置 (75)数据编辑 (76)条码讯息 (77)前缀 (78)后缀 (98)后缀 (99)终端字符 (119)字母大小写转换 (121)Caps Lock (122)GS 字元转换 (123)Function Key Mapping (125)附录一十进位数字 (127)附录二ASCII Code 表 (129)附录三功能键 (155)恢复默认设置将使扫描器的所有属性恢复成出厂状态开始设置恢复默认设置结束设置用户默认设置保存用户默认设置: 将经常使用的设置保存下来加载用户默认设置: 将用户默认设置读取回来开始设置保存用户默认设置加载用户默认设置结束设置系统设置待机-低补光当扫描器处于待机状态并超过设置的待机时间时,将补光灯设置为低亮度。
二维数控平台步进伺服系统电气线路说明书二维数控平台步进伺服系统的电气线路是为了实现对运动控制实验室内的微型二维机械平台的计算机控制而设计的。
该系统由机床电气部分和单片机步进电动机伺服驱动板卡两大部分组成。
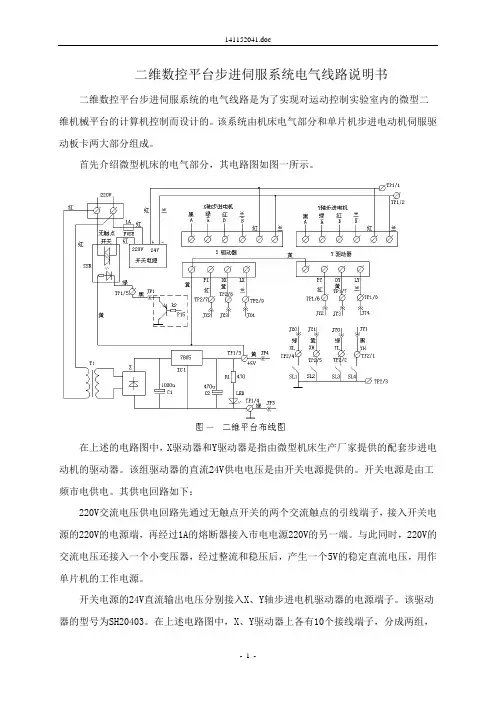
首先介绍微型机床的电气部分,其电路图如图一所示。
在上述的电路图中,X驱动器和Y驱动器是指由微型机床生产厂家提供的配套步进电动机的驱动器。
该组驱动器的直流24V供电电压是由开关电源提供的。
开关电源是由工频市电供电。
其供电回路如下:220V交流电压供电回路先通过无触点开关的两个交流触点的引线端子,接入开关电源的220V的电源端,再经过1A的熔断器接入市电电源220V的另一端。
与此同时,220V的交流电压还接入一个小变压器,经过整流和稳压后,产生一个5V的稳定直流电压,用作单片机的工作电源。
开关电源的24V直流输出电压分别接入X、Y轴步进电机驱动器的电源端子。
该驱动器的型号为SH20403。
在上述电路图中,X、Y驱动器上各有10个接线端子,分成两组,其中,六端子组为步进电动机接口端子,该端子组最右侧的两个为电源端子,分别接24V 电压的正端和地端,其接线的颜色对应为红和兰,其余四个端子分别接X、Y轴的两个步进电动机的两相绕组B,A,,,其接线的颜色对应为黑、绿、红、兰。
AB四端子组是单片机控制接口端子,该端子组中最左边的一个端子接+5V电源,接线颜色为黄色,其余三个端子分别为脉冲、转向和锁定端子,分别用红、黄、兰三色的导线联结。
在上述电路中,开关电源的交流输入电压受到了无触点开关SSR的控制,由图中标注的符号可以看出,SSR的两个高压开关端子实际上接在其内部的一个双向可控硅的两极上,该双向可控硅由内部的光敏管控制;SSR的两个低压控制端子上标注了INPUT3-32VDC字样,表示当输入直流电压在3-32V范围内时,即可实现对双向可控硅的通断控制。
由图中标注的符号可以看出,其内部接入了一个发光二极管,单片机可以通过无触点开关的直流控制端对该发光二极管进行控制,进而实现对开关电源交流输入电压的通断控制。
平台使用手册2020年7月目录1.文档概述 (1)1.1.编写目的 (1)1.2.浏览器推荐 (1)2.操作说明 (1)2.1.平台注册 (2)2.2.平台登录 (3)2.3.选课——课程中心 (4)2.4.选班——网络班级 (8)2.5.个人中心——学习 (11)2.5.1.我的课程 (11)2.5.2.我的网络班级 (13)2.5.3.课程在线学习 (15)2.5.4.我的证书 (26)2.5.5.调查问卷 (27)2.6.个人中心——动态 (28)2.7.个人中心——消息 (29)2.7.1.通知公告 (29)2.8.个人设置 (30)2.8.1.个人基本信息修改 (30)2.8.2.更换头像 (31)2.8.3.密码修改 (32)1.文档概述1.1.编写目的本手册旨在为国家卫生健康委干部培训中心远程教育培训平台学员提供关于系统的使用说明和注意事项,以使各位学员可以更高效、安全的在平台中进行操作及查询等。
1.2.浏览器推荐为了能更好的访问平台,建议您使用谷歌浏览器、360浏览器极速模式、极速浏览器极速模板等谷歌内核浏览器。
2.操作说明学员在浏览器下输入地址:/cms/,即可打开网站门户页面。
通过该门户系统可以查看管理员发布的新闻公告、培训通知等内容。
同时还可以通过门户系统查看报名管理员推荐的课程资源以及培训班级资源等。
除此之外,还可以在该门户页面中登录到学员工作室,进行在线课程学习,交流互动,如果没有相应账号可以通过点击“注册”按钮,在线立即完成账号注册,账号注册无须管理员审核。
2.1.平台注册点击门户页面的上方的注册按钮,进入到以下注册页面。
根据页面提示输入相应内容,点击注册。
注册成功后,无须管理员审核直接生效。
点击登录,输入用户名密码进行登录操作即可。
2.2.平台登录在用户登录区内输入用户名、密码、验证码,点击登录按钮,即可完成登录操作,登录后显示该学员报名的课程、班级数据,点击“进入个人中心”可跳转到个人工作室。
目录1. 系统安装 (2)1.1. 运行环境 (2)1.2. 安装步骤 (2)2. 进入退出系统 (3)2.1. 进入系统 (3)2.2. 退出系统 (4)3. 个人管理 (5)3.1. cad签名管理 (5)3.2. 我的图块管理 (7)4. 界面布局与基本操作 (11)4.1. 界面布局 (11)4.2. 添加、修改、删除文件夹 (12)4.3. 添加、修改、删除文件 (14)4.4. 新建图纸文件 (18)5. AutoCAD图纸右键菜单使用说明 (20)5.1. 添加我的图块 (20)5.2. 添加、修改标准图签 (21)5.3. 引用资料图(外部参照) (24)5.4. 修正图层(加前缀) (25)5.5. 规范专业图层(重命名) (26)6. 提资料与收资料 (28)6.1. 提资料 (28)6.2. 收资料 (29)7. 校审 (31)7.1. 提校审 (31)7.2. 校审 (33)8. CAD图纸归档 (37)9. 其它需要说明的内容 (40)9.1. 转换图层关系 (40)9.2. 常用命令 (40)1.系统安装1.1.运行环境(1)操作系统:Windows XP 全系列或更高版本(2)CAD版本:AutoCAD 20081.2.安装步骤(1)首先安装Microsoft .NET Framework 3.5 包(如果系统是Win7或已安装AutoCAD2010\2011,则不用安装);(2)下载SipprCAD.rar到本地且解压到C:\SipprCAD;(3)打开AutoCAD2008,点击"加载应用程序"将Sippr.lsp加载到CAD的启动组;(4)重新打开CAD,输入命令"sippr",出现登陆界面(如图1-1所示),用户名和密码与EEP协同管理平台相同;备注:AutoCAD2008安装文件地址:ftp://192.168.1.23/专业软件/AutoCAD2002-2008/cad2008支持64位.rar (64位可用)天正7.5安装文件地址:\\192.168.1.42\天正建筑7.5破解不过期注意:该版本仅仅是个试用版,如若在使用过程中出现问题或不解之处请记下并汇总遇到的问题,拨打67606093。
第三章二维运动平台电气控制系统设计根据总体方案及机械结构的控制要求,确定硬件电路的总体方案,绘制系统电气控制的结构框图。
PLC控制方案3.1 确定控制方案二维运动平台电气控制系统有继电器控制、单片机控制和PLC(可编程控制器)控制三种方式。
继电器控制方式存在可靠性差、可塑性差、接线复杂、自动化程度低等一系列缺点。
单片机控制方式采用单片机作为控制单元,开发周期较长,抗干扰性差,可靠性低,灵活性差。
PLC由CPU、存储器、输入/输出接口、内部电源和编程设备几部分构成,结构紧凑,集成度较高,开发方便,工作稳定可靠。
因此,本设计方案选用小型PLC作为控制单元。
可编程控制器是以计算机技术为核心的通用工业自动控制装置,是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用可编程序的存储器,用来在其内部存储执行逻辑运算、顺序控制、定时、计数和算术运算等操作的命令,并通过数字式模拟式的输入和输出,控制各种类型的机械或生产过程。
可编程序控制器及其有关设备,都应按易于与工业控制系统联成一个整体,易于扩充功能的原则而设计。
基于PLC的控制系统由小型可编程控制器、脉冲输出模块、交流伺服系统、键盘(多个开关组合而成)、显示器(LCD指示灯)等几部分组成。
系统的加工程序和控制命令通过键盘操作实现,LCD指示灯可以实时显示系统的工作状态。
设计内容包括PLC选用,交流伺服电机控制电路,键盘显示电路以及其他辅助电路的设计(例如越界报警电路,掉电保护电路等)。
本方案选用的PLC控制系统由1台日本三菱公司的FX系列小型可编程控制器FX2N-32MR,2台FX2N-10PG脉冲输出模块,2套三菱MR-J2S系列及交流伺服系统(各包含1台HC-KFS73(B)交流伺服电机),其核心是可编程控制器,其输入部分主要接受行程开关、急停开关和手动开关等的动作信号,输出部分主要用于控制伺服驱动电机。
3.2 PLC控制系统硬件介绍3.2.1 电气控制系统框图控制系统是由硬件和软件两部分组成,硬件是组成系统的基础,有了硬件软件才能有效地运行。
前言感谢您使用本精准测控系统,希望它能满足您对测量计算机化的要求。
您的赏识对我们是莫大的鼓舞。
本说明书包括软件概要和操作说明。
在初学阶段, 它是一本关于影像测量机的教科书,帮助你学习,导入使用;在日常的使用与解决一些具体问题阶段,它又是一本工具书,你可以通过前面明晰的目录作为索引, 快速的查找你要解决的问题。
希望通过这本说明书能对你有所帮助, 在仪器的操作上让你尽快的进入状态, 享受测量计算机化所带给您的便利和快捷,减轻您的工作负担。
提高你们的质量管理能力,从而达到降低成本,提高工效的目的。
软件介绍精准测控软件综合了机器视觉,精密光机,精密测量算法等技术,并在使用中充分吸收和采纳了了广大客户的意见和建议, 经过一系列改善, 真正成为一个为客户们所认同的, 使用起来得心应手的精密尺寸计量和位置检测的工具。
在此, 感谢广大的客户对我们工作的支持! 对精密计量事业的支持! 今后我们还会继续努力, 竭尽全力的为客户服务, 在软件的测量性能和测量方法上不断的推陈出新, 以答谢客户的厚爱。
软件特点◆拥有超强及完善的2.5D几何测量功能。
◆适合用于解决批量工件或复杂尺寸之检测效率;强调快速、精准;品质保证。
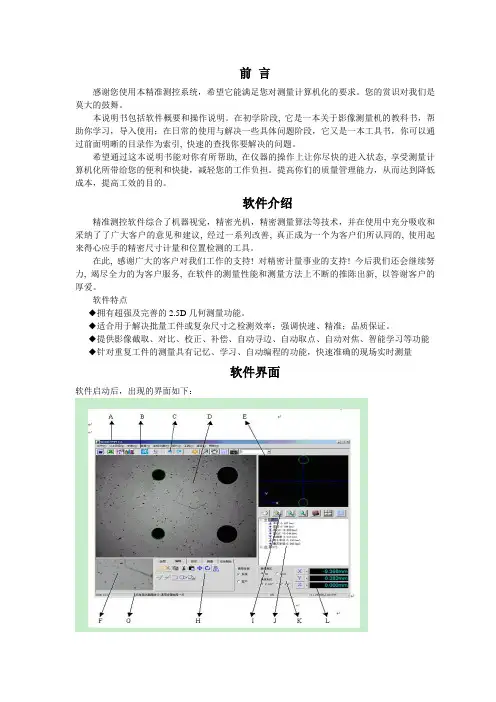
◆提供影像截取、对比、校正、补偿、自动寻边、自动取点、自动对焦、智能学习等功能◆针对重复工件的测量具有记忆、学习、自动编程的功能,快速准确的现场实时测量软件界面软件启动后,出现的界面如下:A.标题栏:显示软件名称B.菜单栏:提供软件所支持的功能C.工具条:常用功能的快捷键D.视频区:测量操作区E.编辑区:对测量的图元进行编辑F.放大区:对视频进行局部放大G.状态栏:显示当前的状态H.测量命令:选择进行的操作I.编辑命令按钮:对编辑区进行编辑的操作命令J.图元树:对测量的结果以树状结构进行层次显示K.制式区:选择所使用的单位制式L.计数区:显示当前的计数值软件使用启动软件后,我们就可以看见软件界面的十二个区域了,下面分别进行介绍。

精密机械与仪器设计课程设计说明书二维数控精密工作台学院:机电与信息工程学院班级:测控技术与仪器08级学号:0811350121姓名:吴桥摘要数控机床是一种高度自动化的机床,随着社会生产和科学技术的迅速发展,机械产品的性能和质量不断提高,改型频繁。
机械加工中,多品种、小批量加工约占80%。
这样,对机床不仅要求具有高的精度和生产效率,而且还要具备“柔性”,即灵活通用,能迅速适应加工零件的变更。
数控机床较好地解决了形状复杂、精密、小批、多变的零件加工问题,具有适应性强、加工精度高、工质量稳定和生产效率高等优点,是一种灵活而高效的自动化机床。
精密数控工作台可广泛应用于激光焊接、层射线扫描、械手检测装置及实用教学领域。
随着电子、自动化、计算机和精密测试等技术的发展,数控机床在机械制造业中的地位将更加重要,而X-Y作台是这些设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。
关键字:数控工作台步进电机控制滚珠导轨目录一、二维数控精密工作台的原理 (1)二、传动方案的确定 (2)三、机械系统设计的整体方案 (2)(一)工作台总体结构的确定 (2)(1)丝杆螺母副的选用 (2)(2)导轨副的选用 (3)(3)联轴器的选用 (3)(4)电动机的选用 (3)(二)绘制总体方案图 (3)(三)工作台质量计算 (4)(四)滚珠丝杆选择 (4)(1)滚珠丝杆工作长度计算 (5)(2)滚珠丝杠副载荷及转速计算 (5)(3)确定预期额定动载额 (6)(4)传动形式和支承方式的选择 (7)(5)滚珠丝杆副稳定性校核 (9)(6)滚珠丝杆副的刚度计算 (10)(五)直线滚动导轨选择计算 (10)(1)导轨型式选择 (10)(2)导轨额定寿命计算 (11)(六)步进电机的计算与选型 (12)(七)联轴器的选定 (14)(八)轴承选择 (15)四、控制系统设计 (15)(一)控制系统总体方案 (15)(二)控制系统具体方案 (16)(三)光栅传感器 (17)五、结论 (18)六、参考资料 (19)一、二维数控精密工作台的原理如图2.1.1所示为二维数控平台实验原理样机原理图,图2.1.2为二维数控平台实物照片。
摘要【摘要】:X-Y工作台是指能分别沿着X向和Y向移动的工作台。
数控机床的加工系统、立体仓库中堆垛机的平面移动系统、平面绘图仪的绘图系统等,尽管结构和功能各不相同,但基本原理相同。
机电一体化系统是将机械系统与微电子系统结合而形成的一个有机整体。
本文通过对X-Y工作台的机械系统、控制系统及接口电路的设计,阐述了机电一体化系统设计中共性和关键的技术。
本次课程设计,主要设计和研究X-Y工作台及其电气原理图。
确定X-Y工作台的传动系统,并且选择了螺旋传动,验算了螺旋传动的刚度、稳定性,寿命等参数;还设计了导轨,根据其用途和使用要求,选择了直线滚动导轨副,确定了其类型、转动力矩、转动惯量。
利用8031、6264、2764、373、8155、8255等MCS—51单片机设计其硬件电路图。
【关键词】:滚珠丝杠螺母副;直线滚动导轨副;步进电机;MCS—51单片机目录第一章总体设计方案 (4)1.1系统运动方式的确定与驱动系统的选择 (4)1.2机械传动方式 (4)1.3计算机系统选择 (4)1.4总体方案的确定 (5)第二章机床进给驱动系统机械部分设计计算 (6)2.1 设计参数 (6)2.2 滚珠丝杠螺母副的计算与选型 (6)2.2.1 X向进给丝杠 (6)2.2.2 Y向进给丝杠 (8)2.2.3滚珠丝杠副的几何参数 (13)2.3 滚动导轨的计算与选择 (13)2.3.1 滚动导轨副的额定寿命 (13)2.4.1 转动惯量的计算 (15)2.4.2 电机的力矩的计算 (16)第三章微机数控系统硬件电路设计 (23)3.1 计算机系统 (23)3-2 单片微机数控系统硬件电路设计内容 (23)3.2.1 绘制电气控制系统框图 (23)3.2.2 选择CPU的类型 (24)3.2.3 存储器扩展电路的设计 (24)3.2.4 I/O接口电路设计 (25)3.3 各类芯片简介 (25)3.3.1 8031芯片简介 (25)3.3.2 373芯片简介 (25)3.3.3 6264芯片简介 (26)3.3.4 2764芯片简介 (26)3.3.5 8155芯片简介 (26)3.3.6 8255芯片简介 (26)3.4 存储器扩展电路设计 (27)3.4.1 程序存储器ROM的扩展 (27)3.4.2 数据存储器RAM的扩展 (27)3.4.3 译码电路的设计 (28)3.5 I/O接口电路的设计 (28)3.5.1 8155通用可编程接口芯片 (28)3.5.2 8255可编程接口芯片 (29)3.5.3 键盘显示接口电路 (29)3.6 8031的时钟电路 (30)3.7 复位电路 (30)3.8 越界报警电路 (31)3.9 掉电保护电路 (31)3.10 控制系统的功能 (31)3.11 控制系统的工作原理 (31)参考资料 (33)第一章总体设计方案1.1系统运动方式的确定与驱动系统的选择运动方式可分为点位控制系统、点位/点线系统和连续控制系统。
机电一体化系统设计课程设计说明书设计题目: CNC二维工作平台设计专业: 机械电子工程班级:学号:姓名:指导教师:二〇一三年十二月CNC二维工作平面设计摘要在本次设计中,我采用常规分离式主传动设计,机床主传动采用液压操纵机构,可实现十八级转速。
机床主轴箱内的传动齿轮均经淬硬磨齿处理,传动比稳定,运转噪音低。
机床主轴为二支撑结构,前支撑采用C级高精度轴承,润滑油润滑,提高了回转精度,使机床主轴具有良好的精度和刚性。
机床采用单片式电磁刹车离合器,解决主轴的刹车及离合问题,离合器安装于主轴箱带轮处,使床头箱内结构大为简化,便于维修。
机床两轴进给系统采用步进电机驱动滚珠丝杠的典型传动方式,在滑板与床鞍及床鞍与床身之间的滑动面处贴有TSF导轨板,滑动磨擦系数非常小,有助于提高了机床的快速响应性能及生产效率。
机床采用立式四工位刀架,该刀架布刀方便,刚性好。
进给方面,采用开环数控系统,即步进电机数控进给方式。
采用步进电机开环数控系统已基本能满足进给精度的要求。
主传动由于采用了分离传动发案,可较好的隔离电机及变速箱的震动,解决了热变形对主轴的影响,提高机床的加工精度。
再者,数控系统采用单片机技术,可靠性高,成本低,经济性好。
在总体性能上可以达到经济精密数控机床之列,达到较好的性价比。
该机床可以加工各种轴类、盘类零件,可以车削各种螺纹、圆弧、圆锥及回转体的内外曲面。
作为通用型机床,特别适合汽车工业、摩托车行业、电子工业、航天、军工等行业,对旋转体类零件进行高效、大批量、高精度加工时采用。
机床采用机、电、液一体化结构,整体布局紧凑合理,便于维修和保养,外形符合人机工程学的原理,宜人性好,便于操作。
关键词: CNC ;CJ6132 ;分离传动;步进电机目录任务分配 (1)第1章绪论 (2)1.1 设计背景 (2)1.2 系统总体方案设计概述 (2)第2章方案设计 (3)2.1 性能要求 (3)2.2 设计思路 (3)2.3 尺寸设计 (3)第3章机械结构设计(传动系统设计) (4)3.1 床身 (4)3.2 床头箱结构 (4)3.3 进给系统 (4)3.4 刀架 (4)3.5 尾座采用手动尾座 (4)3.6 冷却系统 (4)3.7 卡盘 (4)3.8 电气系统 (5)3.9 安全保护 (5)第4章CNC二维平台的控制电路的设计(硬件系统的设计) (6)4.1 主要参数的确定 (6)4.2 传动系统图拟定 (6)4.3 电机选择 (6)4.4 进给系统计算 (7)第5章数控系统设计 (9)5.1 单片机系统控制设计的基本要求 (9)5.2 数字控制系统框图 (9)5.3 数控系统的硬件特点 (9)5.4 控制系统图及芯片的选择 (10)5.4.1 系统的选用 (10)5.4.2 系统的扩展 (10)5.4.3 标准型数控系统 (11)5.4.4 MCS-51系列(三总线结构) (13)5.4.5 振荡器和时钟电路 (13)5.5 存储器及系统扩展设计。
通用二维运动平台设计学校代码:10128 学号:课程设计说明书题目:学生姓名:学院:机械学院班级:机电10-3班指导教师:贺向新20XX年 1 月 10日内蒙古工业大学课程设计内蒙古工业大学课程设计任务书课程名称:专业综合设计2 __ 学院:机械学院班级:机电10-3班学生姓名:_ 学号:指导教师:贺向新一、题目通用两维运动平台设计二、目的与意义《专业综合设计2》课程设计是机械设计制造及其自动化专业实践性非常强的教学环节之一,是机械类高年级学生综合应用基础课、技术基础课、专业课等知识体系,将机械、驱动、传感及计算机控制有机地集成融合在一起,独立设计一种具有特定功能的机电装备。
通过本次课程设计,培养学生运用所学《机电装备设计》课程的知识,对典型机电装备的工作原理、组成要素及核心技术问题的分析能力;培养学生用《机电装备设计》的知识及相关知识体系,掌握如何将机械和电气驱动、检测技术和计算机控制融合在一起,如何构成一种性能优良、工作可靠及结构简单的机电装备的一般设计方法和规律,提高设计能力;通过设计实践,熟悉设计过程,学会正确使用资料、正确使用图书特别是电子图书资源、网络资源,查阅技术文献、设计计算、分析设计结果及绘制机械、电气图样,在机电一体化技术的运用上得到训练;通过课程设计的全过程,为学生提供一个较为充分的设计空间,使其在巩同所学知识的同时,强化创新意识,在设计实践中深刻领会机电装备设计的内涵。
三、要求技术参数 1、运动平台面尺寸:200×160; 2、平台移动行程:X ×Y=125×100; 3、夹具和工件总重:400N; 4、最高运行速度:步进电机运行方式:空载1m/min; 切削:/min;交流伺服电机运行方式:空载:15m/min;切削:6m/min; 5、系统分辨率:开环模式/step;半闭环模式/step; 6、系统定位精度:开环模式±;半闭环模式±;7、切削负载:X向200N;Y向300N;Z向400N 设计要求 1、实现X-Y两坐标联动; 2、用步进电机或交流伺服电机作驱动元件; 3、设置工作台的越位报警和紧急事故的急停开关,并响应中断; 4、任意平面曲线的加工,具有自动换象限的功能; 5、平台具有快速驱动功能; 6、平台具有断电手动调整功能。
二维呋喃唑酮片使用说明书请仔细阅读说明书并在医师指导下使用二维呋喃唑酮片使用说明书【药品名称】通用名称:二维呋喃唑酮片英文名称:Furazolidone Vitamin B6 and Vitamin K4 Tablets 汉语拼音:Erwei Funanzuotong Pian【成份】本品含呋喃唑酮、维生素B6、维生素K4。
【性状】本品为黄色片剂。
【适应症】用于胃、十二指肠溃疡、慢性胃炎。
【规格】0.1g呋喃唑酮,8mg维生素K4,20mg维生素B6。
【用法用量】口服。
一次1~2片,一日3~4次。
【不良反应】偶见恶心、呕吐、腹泻、头痛、头晕、药物性皮疹等不良反应。
【禁忌】1、对本品过敏者禁用。
2、新生儿禁用。
【注意事项】1.连服7日后,应停药5~6日,不得超量和长期连续服用。
2.服药期间严忌饮酒,避免食用酪胺含量丰富之食品,否则易导致不良反应。
【孕妇及哺乳期妇女用药】慎用。
【儿童用药】新生儿禁用。
【老年用药】慎用。
【药物相互作用】1、本品中的维生素B6能增加左旋多巴的不良反应。
2、氯霉素、环丝氨酸、乙硫异烟胺、盐酸肼酞嗪、免疫抑制剂包括肾上腺皮质激素、环磷酰胺、环孢素、异烟肼、青霉胺等可拮抗维生素B6或增加维生素B6经肾排泄。
【药物过量】呋喃唑酮一日剂量超过0.4g,或总量超过3.0g时会诱发精神障碍及多发性神经炎。
【贮藏】密封,在阴凉干燥处保存。
【包装】0.17g×100片×10瓶【有效期】暂定24个月【执行标准】化学药品地标升国标国家药品标准第十册WS-10001-(HD-0911)-2002说明书字数:779。
二维运动混合机说明书10000EYH-10000系列二维运动混合机使用说明书南京华星制药设备有限公司NAN JLNG HUA XING ZHI YAO SHE BEI YOU XIAN GONG SI华星制药设备六大系列、四十多个品种供您选用欢迎您使用“华星药机”本公司产品多为机电一体化请用户详阅本手册精心维护在对产品有疑问或有关建议请与本公司联系以便及时答复并修正谢谢您使用本公司产品,多提宝贵意见华星产品一年保修终身维护。
■说明书的用户对象本说明书为二维运动混合机﹙以下简称为本设备﹚的使用说明书以及在关参数的设定、操作方法、注意事项、一般的维修方法等,是为以下人员编写:具有一般电气、控制、机械、知识的操作人同和维修人员●负责本设备选型的人员●操作本设备的操作人员●负责本设备维修的维修人员注意●在本设备说明书的要求的工作条件下使用●本设备请务必在说明书中一般规格及性能的范围内使用●本设备未经授权,严禁用户对设备部份或全部进行改造。
如有问题,请与本公司联系。
●请妥善保管本设备的有关资料,以便于随时查阅。
声明●本说明书未经许可,不得进行部份或全部复印、复制或提供给他人。
●设备因技术或其它原因发生改动,恕不另行通知。
●本说明书只对说明书配备的产品,如用作指导、操作其它产品引起的后果,本公司无法保证。
●本说明书的所有权属于南京华星制药设备有限公司在说明书中,为了更好地使用本设备,注意事项用以下的有关标记和符号表示以下为有关的标记和符号所表示的意义和重要程度,请务必遵守。
■警告和注意的表示表示如果操作错误,可能导致设备的损伤和人员的伤亡。
表示应该着重注意的地方。
■通电时不要擅自拆卸电气元件及接触内部电路。
有可能会触电。
■通电时,请不要接触端子部份。
■维修时,必须切断设备的外部及面板电源。
■请在本设备指定的电源下使用本设备。
目录主要用途﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍1结构特点﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍2工作原理﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍ 3技术参数﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍4技术要求及说明﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍5安装要求﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍ 6操作程序﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍ 7注意事项﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍ 8、一、主要用途:1、本机广泛用于医药、化工、食品、染料、饲料、化肥、农药等行业。
综合课程设计说明书(第11组)重庆交通大学机电与汽车工程学院目录一、课程设计的题目及要求 (2)(一)题目 (2)(二)要求: (2)二、总体方案的确定 (2)三、机械部分的设计和计算 (3)1、工作台的初步设计: (3)2、滚动导轨的参数确定: (5)3、滚珠丝杆计算、选择。
(6)4、步进电机的选择 (8)5、齿轮计算、设计 (10)6、步进电机等效负载计算 (11)四、机床数控系统硬件电路设计 (12)1、确定硬件电路总体方案: (12)2、主控制器CPU的选择: (12)3、I/O口扩展电路设计: (12)4、键盘、显示接口电路: (13)5、步进电机驱动电路 (13)6、其它辅助电路设计 (15)五、系统控制软件的设计 (16)1、系统控制软件的主要内容 (17)2、程序设计技术 (17)3、步进电机控制子程序的设计 (17)4、汇编语言程序设计 (19)六、课程设计的心得和体会 (21)七、参考资料 (22)一、课程设计的题目及要求(一)题目:单片机控制步进电机驱动的多用XY工作台。
已知条件:定位精度:±0.01mm,滚珠丝杠及导轨使用寿命:T=15000h,中等冲击,各题目的有效行程、快速进给速度和工作载荷见下表:(二)要求:1.课程设计应在教师的指导下由学生独立完成,严格地要求自己,不允许相互抄袭;2.认真阅读《课程设计指导书》,明确题目及具体要求;3.认真查阅题目涉及内容的相关文献资料、手册、标准;4.大胆创新,确定合理、可行的总体设计方案;5.机械部分和驱动部分设计思路清晰,计算结果正确,选型合理;6.微机控制系统方案可行,硬件选择合理,软件框图正确;7.手工或电脑绘制机械系统装配图一张(A1),控制系统电气原理一张(A1),图纸符合国家标准,布图合理,内容完整表达清晰;8.课程设计说明书一份(不少于5000字),包括:目录,题目及要求,总体方案的确定,机械系统设计,控制系统设计,参考文献等。
ProjectWise通⽤使⽤⼿册ProjectWise V8i (SELECTServer 3)⽤户使⽤⼿册⽬录1 ProjectWise概述 (55)1.1 什么是ProjectWise系统 (55)1.2 ProjectWise的功能特点 (55)1.3 ProjectWise给⽇常⼯作带来的帮助 (77)2 ProjectWise客户端的安装 (88)2.1 安装环境要求 (88)2.2 安装ProjectWise Explorer (99)2.3 安装中⽂包 (1313)2.3 配置数据源 (1616)3 ProjectWise的常规操作 (1818)3.1 系统登录 (1818)3.2 ⽤户界⾯ (2121)3.2.1 基本界⾯介绍 (2121)3.2.2 ⾃定义⼯具栏 (2929)3.4 ⽂档和⽂件夹的导⼊导出 (3333)3.4.1 ⽂档的导⼊导出 (3333)3.4.2 ⽂件夹的导⼊导出 (3434)3.5 创建⽂件夹和⽂档 (3636)3.5.1 ⽂件夹的创建 (3636)3.5.2 ⽂档的创建 (4040)3.5.3 ⽂档的默认双击事件更改 (4343)3.6 编辑修改⽂件 (4545)3.6.1 ⽂档的检⼊检出、更新服务器副本和释放 (4545)3.6.2 ⽂档状态图标的⽰例与说明 (4747)3.6.3 打开⽂档⽅式 (4848)3.6.4 ⽂档集的相关操作 (4949)3.6.5 ⽂档创建新版本 (5151)3.6.6 历史记录 (5555)3.7 查询检索 (6060)3.7.1 ⼀级⼀级的点击寻找相应⽬录 (6060)3.7.2 使⽤类似Google的快速查询 (6060)3.7.3 使⽤直观属性查询对话框 (6161)3.7.4 保存搜索结果 (6363)3.8 个⼈⽂件夹的使⽤错误!未定义书签。
错误!未定义书签。
4 ProjectWise的⾼级功能错误!未定义书签。
二维渲染软件Brender2D用户手册PKPM CAD工程部目录1 序言 (2)2 安装须知 (2)3 使用本软件3-1 主窗口 (2)3-2 主要菜单 (3)3-3 工具栏 (7)3-4 属性栏 (7)4 基本制图流程4-1 载入矢量底图文件 (7)4-2 基本色块生成 (9)4-3 操作色块 (11)4-4 辅助绘图 (17)4-5 显示控制 (18)4-6 文件存取 (18)5 获得帮助 (19)版本号:V1.01 序言二维渲染软件Brender2D是由PKPM工程部研制开发的一款功能较强的商业制图软件。
该软件可用于二维平面、立面效果表现,可制作平面功能分析图、平面设计表现图、立面表现图设计分析草图、房地产售楼书等。
该文档将深入讨论以下使用问题:1)如何使用二维渲染软件(Brender2D)软件系统;2) Brender2D的主要功能模块;3)各类常见问题及疑难问题清单。
2 安装须知2-1 获得软件该软件是中国建筑科学研究院PKPM系统的一部分,获得本软件可以与中国建筑科学研究院CAD工程部联系。
2-2 操作平台推荐基于我们的测试结果,建议用户:操作系统平台,不低于Windows98(第二版)以上版本,推荐使用Windows2000或Windows XP产品;2-3 安装软件若独立使用本软件,只需获得本软件的可执行文件Brender2D.exe即可。
3使用本软件3-1 主窗口本软件的使用区域分菜单栏、工具栏、属性栏、绘制区和状态栏。
图3.1中主要将几个分区进行了标明。
图3.13-2 主要菜单本软件主要有【文件】、【编辑】、【绘图】、【辅助线】、【查看】、【选项】、【视图】、【帮助】等10项菜单,如图 3.1所示。
从这些菜单中可以实现Brender2D 所有功能;1) 文件【文件】菜单包括【打开文件…】、【新建填色文件】、【加载填色文件…】、【保存填色文件…】、【填色另存为…】、【图纸信息…】、【关闭】、【打印…】、【打印预览】、【系统设置…】等10项子菜单,如图3.2所示。
摘要通用二维平台是许多机电一体化设备的基本部件,如数控车床的纵-横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光设备的工作台、电子元件表面贴装设备等。
根据设计要求的工作载荷,通过计算和校核,进行导轨副、滚珠丝杠螺母副和伺服电动机等的选型,在满足性能的要求下,以成本最低为原则,满足工作要求的需要,能稳定完成生产任务。
本次机械装配图采用国产软件CAXA进行绘制,通过提取图符操作调用标准零件,因而能够较快的绘制机械装配图。
电气原理图采用Protel99Se绘制。
关键词:运动平台;滚珠丝杠;计算;绘图;电路图目录第一章通用二维运动平台总体方案的确定 (1)1.1机械传动部件的选择 (1)1.1.1 导轨副的选用 (1)1.1.2 丝杠螺母副的选用 (1)1.1.3 电动机的选用 (1)1.2控制系统的设计 (1)第二章通用二维运动平台机械传动部件的计算与选型 (3)2.1 确定系统脉冲当量 (3)2.2 确定系统切削力 (3)2.3直线滚动导轨副的计算与选型 (3)2.4 滚珠丝杠螺母副的计算和选型 (4)2.4.1 X方向的滚珠丝杠螺母副的计算与选型 (4)2.4.2 Y方向的滚珠丝杠螺母副的计算与选型 (7)2.5交流伺服电动机的计算和选型 (8)第三章控制系统硬件电路设计 (11)3.1 控制系统 (11)3.2 PLC数控系统硬件电路设计 (11)3.2.1 PLC数控控制系统框图 (10)3.2.2 PLC的类型 (12)3.2.3 I/O口线设计 (13)3.3 控制系统的工作原理 (14)致谢 (16)参考文献 (17)第一章通用二维运动平台总体方案的确定1.1机械传动部件的选择通用二维运动平台的X-Y数控工作台,通常由导轨座、移动滑块、工作平台、滚珠丝杠螺母副,以及动力源电动机等部件组成。
为了满足通用二维运动平台实现X.Y 两坐标联动,任意平面曲面的加工,自动换象限,越位报警和急停等功能,进行通用二维运动平台设计总体方案的机械部分的选择。
1.1.1导轨副的选用要设计的通用二维平台是用来配套轻型立式数控铣床的,需要承受的载荷不大,但脉冲当量小,定位精度高,因此,决定选用直线滚动导轨副,它具有摩擦系数小,不易爬行、传动效率高、结构紧凑、安装预紧方便等优点。
1.1.2丝杠螺母副的选用伺服电动机的旋转运动需要通过丝杠螺母副转换成直线运动,满足0.005mm的脉冲当量和定位精度,滑动丝杠副无能力,只有选用滚珠丝杠副才能达到。
滚珠丝杠副的传动精度高、动态响应快、运转平稳、寿命长、效率高,预紧后可消除反向间隙。
1.1.3电动机的选用为了更好的满足X-Y方向的精准运动,和定位精度的提高,采用精度相对较高的交流伺服电动机。
选用了交流伺服电动机作为伺服电动机后,任务书所给的精度对于步进电动机来说是偏高的,为了保证电动机在运转过程中不受切削负载和电网的影响而失步,决定采用半闭环控制。
考虑到X、Y两个方向的加工范围相差不大,承受的工作载荷也相差不大,顾X 方向上满足了设计要求,及Y反向也满足,同时为了减少设计工作量,X、Y两个坐标的导轨副、丝杠螺母副、伺服电动机等都采用相同的型号与规格。
1.2控制系统的设计设计的X-Y工作台因具备单坐标定位、两坐标联动的基本功能,所以控制系统应该设计成连续控制型。
对于交流伺服电动机的半闭环控制,选用市场上广泛应用的PLC控制系统作为通用二维运动平台的控制系统,同时PLC控制系统与交流伺服电动机又有很好的兼容性,所以采用PLC来控制。
控制系统由PLC部分、键盘及显示器、I/O接口及光电隔离电路。
系统的加工程序和控制命令通过键盘操作实现,显示器采用数码管显示加工数据及机床状态等信息。
第二章 通用二维运动平台机械传动部件的计算与选型 伺服系统机械部分设计计算内容包括:确定系统的脉冲当量、区定系统的负载、,运动部件惯量计算,空载起动及切削力矩计算,确定伺服电机,传动及导向元件的设计、计算及选用,绘制机械部分装配图等。
现分述如下:2.1 确定系统脉冲当量一个进给脉冲,使运动部件产生的位移量,称为脉冲当量。
脉冲当量是衡量数控机床加工精度的一个基本技术参数 。
根据设计要求,通用二维运动平台采用的脉冲当量是0.005mm/step 。
2.2 确定系统切削力根据设计要求,机床的切削负载为:X 向600N ;Y 向700N ;Z 向800N ;G 为1000N 。
2.3直线滚动导轨副的计算与选型1、滑块承受当量载荷c P 的计算及导轨型号的选取工作载荷是影响直线滚动导轨使用寿命的重要因素。
本课题中的X-Y 工作台为水平布置,采用双导轨、四滑块的支承形式。
故滑块受的工作载荷为: 1302*2*24l l w l l w w P c -+= 1302*2*24l l w l l w w P c --= 1302*2*24l l w l l w w P c +-= 1302*2*24l l w l l w w P c ++= 其中,移动部件重量G=1000N ,外加载荷错误!未找到引用源。
=800N ,得w=z F +G=1800N ,其中3210,,,l l l l 分别取其最大值为极限位置的距离,分别为500mm 、400mm 、250mm 、200mm ,将上面的数据分别代入上试可得到=1c P 450N 、=2c P -450N 、=3c P 450N 、=4c P 1350N 。
对于全行程来讲还应算出当量载荷c P ,对于载荷呈线性变化则其计算公式如下: 32max min P P P c += 根据上面的计算结果可以算出当量载荷c P =750N=0.75KN 。
根据当量载荷c P 可初步查《机电一体化系统设计课程设计指导书》表3-41,初选直线滚动导轨副的型号为KL 系列的JSA-LG15型,其额定动载荷a C =7.94kN ,额定静载荷0a C =9.5kN 。
任务书规定工作台平面尺寸为500mm ×400mm ,考虑工作行程应留有一定余量,查《机电一体化系统设计课程设计指导书》表3-35,按标准系列,选取导轨的长度为X 方向:940mm ,Y 向:760mm 。
2 距离额定寿命L 的计算上述选取的KL 系列JSA-LG15型导轨副的滚道硬度为60HRC,工作温度不超过100C ,每根导轨上配有两只滑块,精度为3级,工作速度较低,载荷不大,查《机电一体化系统设计课程设计指导书》表3-36~表3-40,分别取硬度系数H f =1.0、温度系数T f =1.00、接触系数C f =0.81、精度系数R f =0.9、载荷系数W f =1.5,代入式50*⎪⎪⎭⎫ ⎝⎛=c a W R C T H P C f f f f f L ,得距离寿命: 50*⎪⎪⎭⎫ ⎝⎛=c a W R C T H P C f f f f f L ≈6810.15Km 远大于期望值50km,故距离额定寿命满足要求。
2.4 滚珠丝杠螺母副的计算和选型2.4.1 X 方向的滚珠丝杠螺母副的计算与选型1、最大工作载荷m F 的计算查《机电一体化系统设计课程设计指导书》表3-29,取颠覆力矩影响系数K=1.1,滚动导轨上的摩擦因数μ=0.005,已知G=1000N ,错误!未找到引用源。
=600N ,错误!未找到引用源。
=700N,错误!未找到引用源。
=800N 。
求得滚珠丝杠副的最大工作载荷:错误!未找到引用源。
=错误!未找到引用源。
+μ(错误!未找到引用源。
+错误!未找到引用源。
+G)=1.1错误!未找到引用源。
600+0.005(700+800+1000)=672.5N2、最大动负载aj C 的计算工作台切削时的最大速度为=v 6m/min=6000mm/min ,初选丝杠的导程=n P 5mm ,取滚珠丝杠的使用寿命=h L 15000h 。
此时丝杠转速==n e P v n 1200r/min 。
由于滚珠丝杠副在较高转速下工作,则: 3161060⎪⎭⎫ ⎝⎛=e h K a H t w e aj n Lf f f f f F C式中 t f ——温度系数t f =1.00;H f ——硬度系数H f =1.0;w f ——载荷系数,按一般运转取w f =1.2~1.5,取W f =1.2;a f —— 精度系数a f =0.9。
K f —— 精度系数a f =0.9。
则: N C aj 7.9199101200150006019.00.100.12.15.672316≈⎪⎭⎫ ⎝⎛⨯⨯⨯⨯⨯⨯= 3、滚珠丝杠螺母副的选型根据计算出的最大动载荷和初选的丝杠导程,查《机电一体化系统设计课程设计指导书》表3-31,选择济宁博特精密丝杠制造有限公司生产的G 系列2005-3型滚珠丝杠副,为内循环固定反向器单螺母式,其公称直径为0d =20mm ,导程为n P =5m,循环滚珠为3圈×1列,精度等级取5级,额定动载荷为9309N,大于最大动负载aj C ,满足要求。
4、传动效率计算将公称直径0d =20mm ,导程h P =5mm ,代入0arctan[/()],h P d λπ=得丝杠螺旋升角λ= 错误!未找到引用源。
,将摩擦角'10ϕ=,代入下式得;5、刚度验算X 方向滚珠丝杠副的支持采用“单推-单推”的方式,丝杠左右端各采用一对推力角接触球轴承,面对面组配,左、右支持的中心距离约为a=534mm 。
如下图所示。
图2.1滚珠丝杠布局结构简图(1)、丝杠的拉伸或压缩变形量'1δ钢的弹性模量E=2.1×510M a P ;查《机电一体化系统设计课程设计指导书》表3-31得,滚珠直径错误!未找到引用源。
,丝杠底径错误!未找到引用源。
,丝杠横截面积S=2/4d π=206.122mm ,已知m F =672.5N 。
将各个数据代入下式得 mm ES a F m 0083.012.206101.25345.67251=⨯⨯⨯=⨯=δ (2)、滚珠与螺纹滚道间接触变形2δ根据公式0(/)3W Z d D π=-,求得单圈滚珠数Z=20;该型号丝杠为单螺母滚珠的圈数×列数为3×1,代入公式:Z Z ∑=×圈数×列数,得滚珠总数量Z ∑=60。
丝杠预紧时,取轴向预紧力N F F m YJ 17.22435.6723=== 代入下式得mm Z F D F YJ W m 0014.010100013.0322=⨯⨯=∑δ因为丝杠加有预紧力,且为轴向负载的1/3,所以变形量可减小一半,取J Ma 1J2δ=0.0007mm 。
(3)将以上算出的1δ和2δ代入δ总=1δ+2δ,求得丝杠总变形量δ总=0.0083+0.0007=0.0090mm =9m μ由于本任务书中丝杠的有效行程为400mm ,由《机电一体化系统设计课程设计指导书》表3-37可知,5级精度滚珠丝杠有效行程在315~400mm 时,行程偏差允许达到40m μ,可见丝杠刚度足够,且δ总小于1/3的开环系统定位精度值25m μ,可见丝杠刚度足够。