基于动态优先级算法的RGV调度策略
- 格式:pdf
- 大小:1.11 MB
- 文档页数:8
智能RGV的动态调度策略智能RGV的动态调度策略⒈引言智能RGV(可编程自动引导车)是一种自动化物流设备,用于在工业生产中进行材料的搬运和物流组织。
其动态调度策略的设计和优化对于提高生产效率和减少设备闲置时间具有重要意义。
⒉目标与需求分析⑴目标●提高生产线的整体效率,减少工作时间和生产成本。
●最大限度地减少的等待时间,提高设备的利用率。
⑵需求●根据生产线上材料的需求,实时分配任务给RGV。
●策略应能处理多种不同类型的任务和多个RGV的协同工作。
●最小化RGV的移动距离。
⒊ RGV调度策略设计⑴任务分配策略根据生产线上各个工作站的生产节拍和产量需求,将任务按优先级排序,并合理分配给可用的RGV。
任务分配的依据可以是任务的紧急程度、材料的重要性,或者其他相关的因素。
⑵移动选择策略在任务分配过程中,需要考虑RGV的移动选择策略。
可以采用最近可达算法,即选择最近的可达工作站或材料存放位置。
同时,还需要考虑RGV的载重能力,确保能够搬运材料的重量或容量。
⑶等待时间优化策略为了减少RGV的等待时间,可以采用预测算法预测未来一段时间内各个工作站的任务需求,提前调度RGV到相应的位置,以便及时处理任务。
同时,还可以采用优先级调度算法,优先处理紧急任务或关键任务,避免任务堆积和延误。
⒋系统实现与优化⑴系统架构设计根据需求分析和策略设计,设计智能RGV的系统架构,包括任务调度模块、移动控制模块、数据传输模块等。
确保系统的可靠性和稳定性。
⑵算法实现与优化根据调度策略设计,实现相关的算法,并进行优化,以提高系统的响应速度和处理效率。
可以采用动态规划、遗传算法、模拟退火等方法来寻找最优解。
⒌系统测试与验证对智能RGV系统进行全面的测试和验证,包括功能测试、性能测试、稳定性测试等,确保系统的准确性和可靠性。
通过测试数据的分析和验证结果的对比,评估系统的性能,并对系统进行进一步的优化。
⒍结论智能RGV的动态调度策略设计对提高生产线效率和减少成本具有重要意义。
智能RGV的动态调度策略智能RGV(自动引导车)是一种能够在物流仓库中自主移动和执行任务的机器人系统。
为了提高RGV的工作效率和资源利用率,需要采用智能的动态调度策略。
下面将详细介绍一种智能RGV的动态调度策略。
智能RGV的动态调度策略主要包括任务分配和路径规划两个方面。
任务分配方面。
在物流仓库中,存在着大量的物料,每个物料都需要进行相应的处理任务。
为了提高RGV的工作效率,需要将不同的任务合理地分配给RGV。
一种可行的任务分配策略是根据任务的紧急程度和所需时间进行优先级排序。
对于紧急任务,RGV需要立即响应并分配资源进行处理;对于较普通的任务,可以根据预估的执行时间和RGV的工作状态进行分配。
还可以根据任务的具体要求将相似的任务进行分组,通过批量处理来提高效率。
任务分配需要根据实际情况不断优化和调整,以保证RGV的高效运行。
路径规划方面。
RGV在执行任务时需要准确地知道物料的位置,并选择合适的路径进行移动。
路径规划需要考虑到RGV的能力和物料的分布情况。
一种常用的路径规划策略是最短路径算法,例如Dijkstra算法或A*算法。
这些算法通过计算路径的权重来选择最优的路径。
在实际应用中,还需要考虑到RGV的工作状态和负载情况。
当RGV处于空闲状态时,可以选择较长的路径以避免冲突和拥堵;而当RGV负载较重时,需要选择最短路径以减少工作时间。
路径规划需要综合考虑多个因素,以提高RGV的移动效率并避免不必要的能耗。
除了任务分配和路径规划,智能RGV的动态调度策略还需要考虑到实时环境信息的变化。
在物流仓库中,物料的分布和任务的数量会不断变化,因此需要实时更新调度策略。
可以利用传感器和监控系统来实时获取环境信息,并根据情况做出相应的调整。
当某个区域的任务数量较多时,可以优先分配任务给距离较近的RGV,以减少任务等待时间;当某个区域的物料数量较多时,可以增加RGV的运行速度以加快处理速度。
动态调度策略需要不断根据实际情况进行优化和调整,以确保RGV的高效运行。
工业RGV的动态调度策略作者:孟芳汀李庆祥付辉来源:《科学导报·学术》2019年第11期摘要:本文运用有向线段旅行商,动态规划,组合调度等方法解决了题RGV动态调度模型的问题。
分析了故障影响生产结果的情况,进行对静态模型的分析,对动态模型的仿真,根据动态静态模型的分析,确定所述情况下的调度模型。
关键词:向线段旅行商;动态规划;组合调度;matlab仿真求解随着科技的进步,生产过程的自动化程度越来越高,更多的大型企业倾向于选择智能加工系统代替人力进行生产加工,智能RGV就是典型的工业机器人中的一种。
RGV通过接受数控机床的指令进行移动,并完成上下料和清洗作业的机器。
本文RGV是一种装载有机械手,清洗槽的智能有轨制导小车,本文是针对较为简单的工业加工流程进行数学模型求解,即一台RGV为8台CNC服务,且每次作业的物料只需要在一台CNC进行一道加工工序;两道工序的物料加工作业情况,每个物料的第一和第二道工序分别由两台不同的CNC依次加工完成,以下是对数学模型的具体求解过程。
首先对所述问题进行分类讨论。
在只有一道加工的情况下,通过有向线段旅行商和对比分析的方法给出RGV路线的最短时间路线。
通过运用单片机的仿真发现并不是简单循环结构,RGV是在收到信号后才会到有需求的数控机床的位置,这样必然会导致一个时间差,致使前一个数控机床与后一个数控机床的开始进行操作的时间会越来越大。
再一次对模型进行讨论,在确定初始顺序的基础上,添加插队机制,即RGV取去最先发出需求指令的数控机床。
两道加工工序的情况,取各自加工时间的倒数作为节拍,进行同期化处理,安排机器的分布,进而得出调度安排。
考虑到工序的先后关系,子问题在一次路线中被多次考虑,建立目标调度优化模型。
目标函数为Z=min max(ek),,xik为0/1变量,表示工序wk是否选择CNC#i进行加工。
1、一道工序的物料加工作业的讨论求解首先采用动态规划[1]的方法进行理论分析。
智能 RGV 的动态调度策略摘要:针对智能 RGV 系统一道工序的物料加工作业情况,首先,RGV根据距离就近原则选择下一操作的CNC。
在 RGV 对所有 CNC 完成一次上料操作后,不断进行上下料、清洗作业的循环操作。
考虑到物料加工时间,我们选择离 RGV 最近的 CNC 作为下一个上料对象。
模型反复按顺序进行操作,直到时间达到 8 小时。
代入各组数据计算,得到相应的RGV动态调度模型和相应的求解算法。
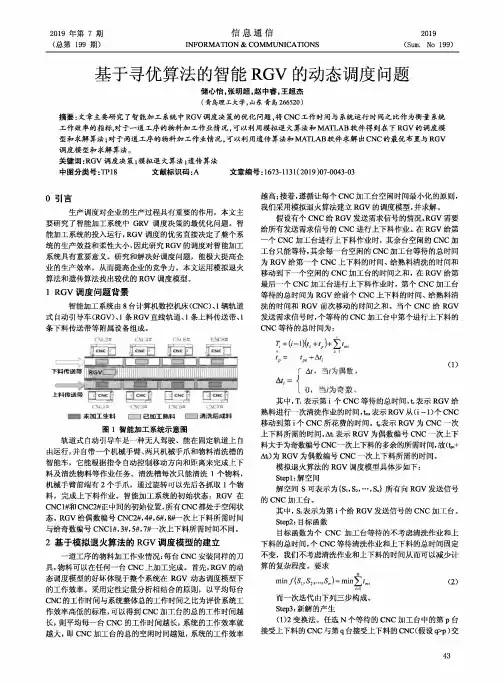
关键词:RGV动态调度全局搜索工作时间均衡度一、背景介绍一个智能加工系统的示意,由 8 台计算机数控机床、1 辆轨道式自动引导车、1 条 RGV 直线轨道、1 条上料传送带、1 条下料传送带等附属设备组成。
RGV 是一种无人驾驶、能在固定轨道上自由运行的智能车。
它根据指令能自动控制移动方向和距离,并自带一个机械手臂、两只机械手爪和物料清洗槽,能够完成上下料及清洗物料等作业任务。
1.任务复述与情况分析任务复述:对一般问题进行研究,给出 RGV 动态调度模型和相应的求解算法。
情况分析:要求对只加工一道工序的情况进行一般性研究。
以 8 小时内加工出最多物料为目标,我们给出了以下一道工序 RGV 动态调度模型。
考虑到RGV 移动的时间远小于物料加工时间,我们选择离 RGV 最近的 CNC 作为下一个上料对象。
模型中反复按顺序进行以下操作,直到时间达到 8 小时:1.等待直到 RGV 空闲且至少一个 CNC 空闲2.使 RGV 移动到距 RGV 当前位置最近的空闲 CNC 处3.对该 CNC 进行上下料操作,若有熟料则还需进行清洗作业三、问题求解针对于智能加工系统来说每班次工作共存在两种状态:启动阶段和稳定阶段。
启动阶段:即开始有 CNC 处于空闲状态的阶段,当所有 CNC 都有处于加工过程时,这一阶段结束,在这一阶段,RGV 不存在等待和清洗操作,CNC 只有空闲和正在加工中两个状态。
稳定阶段:即所有 CNC 都开始工作后的情况,在这一阶段 CNC 有正在加工中,成熟等待,正在上下料三个状态;RGV 有等待、移动、上下料、清洗作业四种状态。
基于最优路径的随机故障智能RGV动态调度策略作者:刘丰瑞邢凯铭张宇航张琳王希来源:《电子技术与软件工程》2018年第23期摘要随着我国现代智能加工系统的不断发展,针对一种RGV-CNC智能加工系统,本文提出了一种基于最优路径的随机故障动态调度模型,采用三个优先级的目标函数,嵌套判断语句,从而建立了动态反馈调整机制。
通过算例分析,求解出RGV的动态调度策略和系统的作业效率,检验出本文中模型的实用性和算法的有效性良好。
【关键词】智能加工系统最优路径动态调度模型随机故障1 问题的提出本文研究如图1所示的一个智能加工系统。
将算例分为2种情况,分别含有3组检验数据。
(1)物料的第一和第二道工序分别由两台不同的CNC依次加工完成。
(2)物料可以在任一台CNC上加工完成,基于CNC在加工过程中可能发生故障(据统计:故障的发生概率约为1%)的情况,每次故障排除(人工处理,未完成的物料报废)时间介于10~20分钟之间,故障排除后即刻加入作业序列。
2 模型的建立与求解2.1 基于最优路径的双工序动态调度模型建立与求解目前,研究智能加工系统的动态调度问题常用方法包括Petri网、时态逻辑、模拟退火、遗传算法Genetic Algorithm,GA)、神经网络等算法,无论是在工业生产、商业经营、日常生活等都具有十分重要的意义。
本文定义“1”表示CNC正在工作,“0”表示CNC空闲并发出信号,1 0 0 1例如0 1 0 0表示CNC2#、CNC8#、CNC3#正在工作,CNC1#、CNC4#、CNC5#、CNC6#、CNC7#正在空闲并发出信号。
以“RGV移动到最近的CNC完成任务”为第一优先级目标函数,在同时有两个相同距离的任务请求时以"RGV移动到奇数序号的CNC完成任务”为第二优先级目标函数,在任务请求的第一优先级目标函数和第二优先级目标函数都相同时以“RGV移动到序号数值较小的CNC完成任务”为第三优先级目标函数,嵌套一段判断“RGV移动时间是否最短”的语句。
智能RGV的动态调度策略
智能RGV(自动化导引车)是一种能够自主进行物料搬运和作业的机器人设备,在工业生产线上起到了重要的作用。
为了使RGV能够高效地完成任务,动态调度策略是必不可少的。
智能RGV的动态调度策略可以分为三个层次,分别是任务调度、路径规划和动态调度管理。
任务调度层次是指根据生产任务的优先级、时间窗口和设备的状态等因素,将任务合理地分配给RGV。
路径规划层次是指根据设备布局、物料输送线路和任务要求等因素,规划RGV的运动路径。
动态调度管理层次是指根据系统的实时状态和参数,动态调整任务的执行顺序和路径规划,以提高工作效率。
在任务调度层次上,智能RGV可以根据任务优先级进行任务分配。
高优先级任务会优先分配给RGV,以保证紧急任务的及时完成。
根据任务的时间窗口,RGV也可以合理分配任务的执行顺序,尽量减少任务的等待时间。
在路径规划层次上,智能RGV可以通过路径规划算法确定最优路径。
路径规划算法可以综合考虑设备布局、物料输送线路和任务要求等因素,找到一条最短路径,以减少RGV 的行驶时间。
路径规划算法还可以考虑设备的负载均衡,避免某些设备过载或空闲。
在动态调度管理层次上,智能RGV可以根据系统的实时状态和参数进行动态调整。
当系统出现故障或某些设备停机时,RGV可以实时调整任务的执行顺序和路径规划,以应对突发情况。
RGV还可以根据实时任务的执行情况,动态调整任务的执行顺序和路径规划,以提高工作效率。
工业RGV的动态调度策略工业RGV (Remote Guided Vehicle) 是一种可以通过远程控制来进行移动和操作的自动化设备,广泛应用于工业生产线上的物料运输与搬运工作。
动态调度策略是指根据实时的生产需求和设备状态,在不同的情况下对RGV的任务分配和路线规划进行动态调整,以提高生产效率和设备利用率。
在工业生产中,RGV的任务主要包括两类:物料运输和设备操作。
物料运输通常需要将原料从仓库或供应区域搬运到生产线上的指定位置,或将半成品和成品从生产线上搬运到库存区域。
设备操作则包括对生产设备进行上料、下料、换模等操作。
动态调度策略主要针对这两类任务进行优化,以减少RGV的空闲时间和运输时间,提高生产效率。
动态调度策略的核心是实时监控和分析生产线的状态和需求。
通过感知和收集相关数据,包括生产设备的运行状态、物料的需求量和位置、RGV的当前位置和状态等,可以判断出哪些任务是紧急且可行的,以及哪些任务可以被合并或延迟执行。
在任务调度方面,可以采用以下策略:1. 优先级调度:根据任务的紧急程度和重要性确定执行顺序。
将紧急任务和重要任务置于优先考虑,确保生产线的正常运行和物料的及时供应。
2. 合并任务:当多个任务可以由同一辆RGV执行时,可以将其合并为一个任务,减少RGV的空闲和等待时间。
将多个物料的搬运需求合并到一个任务中,或将多个设备操作任务合并到一个任务中,以提高RGV的效率。
3. 动态规划路径:根据任务的位置和RGV的位置,利用动态规划算法规划最优路径。
考虑到生产线上的设备和物料的分布情况,以及RGV的速度和搬运能力,选择最短路径,并避免碰撞和拥堵。
4. 实时调整:根据实时的生产需求和设备状态,及时调整任务的执行顺序和路径规划。
当有新的紧急任务产生时,可以中断当前任务,立即响应新的任务;当某个设备出现故障或停机时,可以调整任务,将其它设备的操作任务优先安排。
动态调度策略不仅需要对RGV进行合理的任务调度和路径规划,还需要与生产线的其他设备和系统进行实时的信息交互和协调。
环形智能加工系统中RGV的动态调度策略作者:袁梦婷来源:《价值工程》2019年第27期摘要:基于MDP理论,将“RGV执行并完成任务所需时间”构建为动态优先级,引入随机变量“CNC发生故障和排除故障的时间”,结合RGV、CNC、物料的状态变化情况,建立基于MDP理论的状态转移模型。
并在数值迭代算法的基础上设计了MDP迭代寻优算法对三组系统进行求解,从而得到一道工序物料加工过程中,CNC有1%的概率发生故障的情形下环形智能加工系统在未知动态环境下的最优调度策略。
Abstract: Basing on the MDP theory, we construct the time of RGV to execute and complete the task as the dynamic priority, and introduce two random variables, the time when the CNC is faulty and the fault is removed. At the meanwhile, combining with the state changes of RGV,CNC and materials, we establish a state transition model based on MDP theory. Then, based on the numerical iterative algorithm, the MDP iterative optimization algorithm is designed to solve the three groups of systems, so that the optimal scheduling strategy of the intelligent processing system in an unknown dynamic environment during the processing of a process material with a 1% probability of failure in the CNC is obtained.關键词:MDP理论;动态优先级;迭代寻优算法;动态调度最优策略Key words: MDP theory;dynamic priority;iterative optimization algorithm;dynamic scheduling optimal strategy中图分类号:TP273 ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文献标识码:A ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文章编号:1006-4311(2019)27-0043-030 ;引言随着当今世界科学技术的蓬勃发展,现代物流观念渐渐深入人心。
工业RGV的动态调度策略工业RGV(可重复使用的自动化导向车)是一种用于工业生产线上物料搬运和装配操作的智能设备。
在工业生产中,RGV的动态调度策略对于提高生产效率和降低生产成本至关重要。
本文将介绍工业RGV的动态调度策略。
工业RGV的动态调度策略主要包括任务派发策略、路径规划策略和冲突解决策略。
任务派发策略是指如何将不同的任务分配给RGV进行处理。
在工业生产中,有多个任务需要同时执行,如搬运物料、装配产品等。
任务派发策略的目标是根据任务的优先级和工艺流程,合理地分配任务给RGV,以最大限度地提高生产效率。
常见的任务派发策略有最早截止期优先、最短工序时间优先、最长工序时间优先等。
路径规划策略是指RGV在执行任务时,如何选择最优的路径来完成任务。
路径规划策略的目标是减少RGV的移动时间和距离,提高其运行效率。
通常会采用最短路径算法,如Dijkstra算法、A*算法等,来计算RGV的最短路径。
路径规划策略还需要考虑RGV在遇到障碍物或其他非操作状态下如何处理,如等待、绕过等。
冲突解决策略是指当多个RGV同时执行任务时,如何解决它们之间的冲突。
在工业生产中,多个RGV可能同时需要访问同一个工作站或执行相同的任务。
冲突解决策略的目标是避免RGV之间的碰撞或资源冲突,确保任务能够顺利执行。
常见的冲突解决策略有时间片轮转法、优先级调度法等。
除了上述的动态调度策略,还可以基于机器学习等技术对RGV进行优化和改进。
使用强化学习算法可以对RGV的决策过程进行训练和优化,使其能够在不断学习和适应的过程中提高调度策略的效果。
工业RGV的动态调度策略是一个复杂而关键的问题。
通过合理的任务派发、路径规划和冲突解决策略,可以提高工业生产线的效率和灵活性,从而实现降低生产成本和提高竞争力的目标。
RGV 动态调度策略研究摘要:随着移动互联网的快速发展和数据体量的爆炸式增长,云计算已经成为了一种重要的计算模式,许多企业开始借助云计算技术来部署自己的服务。
在云计算平台中,一般采用多租户的资源共享机制,其中最基本的云计算调度策略是云计算任务动态调度。
本文中,我们以云计算平台中基于多租户的资源共享机制为基础,探讨了一种基于RGV 动态调度策略的研究。
我们首先分析了基本的云计算任务动态调度策略,结合云计算平台的特点,提出了一种改进的RGV 动态调度策略,并分析了该策略的优缺点。
最后,我们利用实验数据对该调度策略进行了验证,结果表明该策略可以有效地提高云计算的效率和性能。
关键词:RGV 动态调度策略;云计算;多租户;资源共享机制;任务动态调度第一章:引言随着移动互联网的快速发展和数据体量的爆炸式增长,云计算已经成为了一种重要的计算模式,许多企业开始借助云计算技术来部署自己的服务。
在云计算平台中,一般采用多租户的资源共享机制,其中最基本的云计算调度策略是云计算任务动态调度。
动态调度是指根据系统当前的状态,针对不同的任务进行合理的调度,分配合适的计算资源。
在多租户的云计算环境中,每个租户的任务可以同时运行在同一个计算节点上,任务同时调度和运行需要合理的调度策略来保证系统性能。
本文中,我们针对多租户的云计算环境,提出一种基于RGV 动态调度策略的研究。
我们首先分析了基本的云计算任务动态调度策略,结合云计算平台的特点,提出了一种改进的RGV 动态调度策略,并分析了该策略的优缺点。
最后,我们利用实验数据对该调度策略进行了验证,结果表明该策略可以有效地提高云计算的效率和性能。
第二章:基础理论2.1云计算云计算作为一种新型的计算模式,已经得到了广泛的应用。
云计算是一种通过网络的方式,将各种计算资源(包括软件、硬件等)提供给需要使用它们的用户。
这种计算模式具有高度的灵活性和可扩展性,用户可以随时根据自己的需求申请相应的计算资源,这种计算模式使得企业可以从复杂的IT 基础设施中抽身出来,更专注于自己的核心业务。
智能制造数码世界 P.256基于动态规划的智能RGV动态调度朱雅喃 渤海大学软件与服务外包学院 张龙昌 渤海大学信息科学与技术学院 孙义来 李季瑀 渤海大学软件与服务外包学院 刘允峰 渤海大学信息科学与技术学院摘要:轨道自动引导车用于自动化物流系统和自动化仓库领域,具有速度快可靠性高成本低等特点。
本文研究对象是一种无人驾驶、能在固定轨道上自由运行的智能车,在实际应用过程中,由于仅有一台RGV进行上下料操作任务和清洗任务,为了解决在有效时间内,完成更多的生料加工任务,本文通过建立数学模型进行仿真,就RGV在规定时间内如何调度问题给出最优方案。
关键词:RGV动态调度 动态规划引言智能轨道引导车能根据指令能自动控制移动方向和距离,并自带一个机械手臂、两只机械手爪和物料清洗槽,能够完成上下料及清洗物料等作业任务。
一个智能加工系统的示意图,由8台计算机数控机床、1条RGV直线轨道、1条上料传送带、1条下料传送带等附属设备组成。
RGV是一种无人驾驶、能在固定轨道上自由运行的智能车。
它根据指令能自动控制移动方向和距离,并自带一个机械手臂、两只机械手爪和物料清洗槽,能够完成上下料及清洗物料等作业任务。
1 情况分析本文所研究的情形为当加工工序为一道工序时,建立动态模型,运用合理的算法,求解出效率最高的加工顺序。
加工效率=总时间/单个任务的平均完成时间。
总时间已知,固定为8小时,所以当单个任务的平均完成时间最小时,效率最高。
单个任务的完成时间表示为:工作时间/空闲时间+工作时间。
即当空闲时间最小时,工作效率越高。
工作时间由清洗时间、加工时间、移动时间及一次上下料时间构成。
再由实际工作情况可以推理得出,空闲时间由RGV的调度产生。
则建模目标转化为RGV的路径规划调度模型。
实质是规划RGV 的路径,使得所有CNC空闲时间为最小。
某一时间段内如果要使得CNC空闲时间最短,当前RGV空闲出来后需要优先服务最早可以开始加工的CNC,即RGV应服务于最小时间。
工业RGV的动态调度策略工业RGV动态调度是指在生产线上,通过动态调度算法,使得RGV(自动化导轨式送货车)可以根据实时情况对任务进行优化,以达到最优的生产效率和资源利用效率。
其主要实现方式是通过一系列优化算法和规则来调度RGV运送物料的路径和时间,从而提高生产效率。
动态调度策略主要包括以下几个方面:1. 任务调度:通过动态调度算法,根据实时生产线任务状况,重点关注任务的紧急程度和优先级,合理安排任务优先级,以保证最优生产效率。
2. 运输路径规划:RGV在执行任务时,路径规划也是一个重要的问题。
在动态调度时,应根据实时情况,通过智能规划算法确定最佳路径,以缩短RGV的行驶距离,提高生产效率。
3. RGV时间分配:RGV的时间调度规划应该尽量充分考虑任务描述及其到达时间,包括到达时间和完成时间,以及任务的其他因素。
通过对RGV时间分配的优化,使其能够高效地完成任务,并迅速返回本位置等待下一次调度任务。
4. 异常与故障处理:如电子设备故障、电力失灵、道路拥堵等情况均可能导致RGV运输任务失败。
在动态调度中需要对异常和故障情况制定对应的处理流程,使系统能够更好地应对各类异常和故障。
动态调度策略的实现需要考虑到生产线所涉及的各个方面,例如生产任务的难度与优先级、RGV物料的类型、数量和重量、工人和设备的使用时间,以及各项运行的偏差量等等。
因此,需要根据不同的生产线特点来选择相应的调度策略。
总的来说,动态调度策略可以使得RGV出现调度减少,运输时间缩短,人力资源利用率提高,节省了时间和成本,使得生产流程更加高效和优化,进而提高企业和整个行业的竞争力。
在未来,动态调度策略将会在更多的生产线中得到应用,以满足日益增长的生产需求。
工业RGV的动态调度策略工业RGV(固定式引导车)是一种用于工业生产的自动化设备,用于对工件进行搬运、装配和物料补给等操作。
为了提高工业RGV的效率和灵活性,需要设计一种动态调度策略,使其能够根据实时的生产情况和任务需求,灵活地调度工业RGV的运行和任务分配。
动态调度策略的主要目标是提高工业RGV的作业效率和资源利用率。
具体而言,动态调度策略需要根据以下因素进行调度决策:工件的优先级、任务的紧急程度、工业RGV的位置和状态、任务的难易程度等。
在实际应用中,可以通过以下几个步骤来实现动态调度策略。
需要实时监测生产现场的工件和任务情况。
这可以通过与生产线集成的传感器网络和监控系统来实现。
通过实时监测,可以获取到工件的位置、状态和优先级等信息,以及任务的紧急程度和难易程度等信息。
需要根据监测到的信息,动态地更新任务列表和工业RGV的调度计划。
任务列表包括待执行的任务和已完成的任务,根据任务的优先级和紧急程度,可以确定待执行任务的执行顺序。
根据任务的难易程度和工业RGV的位置和状态,可以确定任务的分配给哪个工业RGV。
然后,在确定了任务列表和工业RGV的调度计划后,需要实时监测和调整工业RGV的运行。
这可以通过工业RGV的传感器网络和控制系统来实现。
工业RGV会根据调度计划自动执行任务,同时通过传感器来获取自身的位置和状态,以及工件的位置和状态。
如果发现任务无法按计划执行或者发生紧急情况,可以通过控制系统进行调整。
根据实时监测到的信息和调整策略,不断优化动态调度策略。
通过分析历史数据和实时数据,可以对动态调度策略进行改进,提高工业RGV的效率和灵活性。
可以利用机器学习和智能算法,对动态调度策略进行自动优化和学习,以适应不断变化的生产环境和任务需求。
工业RGV的动态调度策略是一项复杂的任务,需要综合考虑多个因素并实时监测和调整。
通过合理设计和优化,可以提高工业RGV的效率和灵活性,实现更高的生产效益。