车牌识别算法答辩PPT
- 格式:ppt
- 大小:1.32 MB
- 文档页数:5
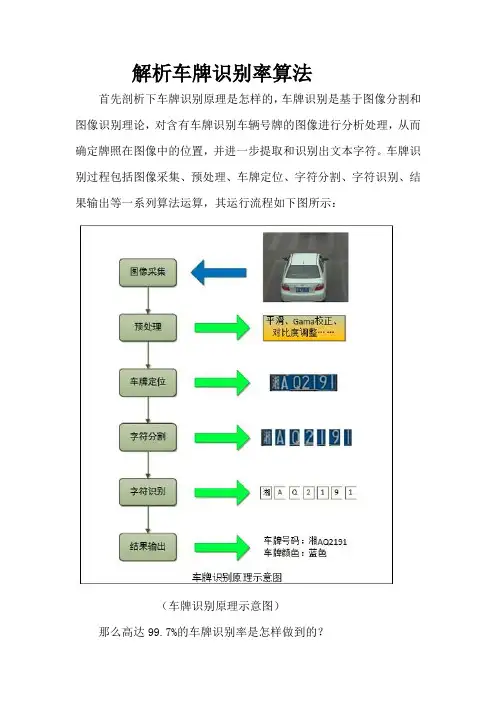
解析车牌识别率算法首先剖析下车牌识别原理是怎样的,车牌识别是基于图像分割和图像识别理论,对含有车牌识别车辆号牌的图像进行分析处理,从而确定牌照在图像中的位置,并进一步提取和识别出文本字符。
车牌识别过程包括图像采集、预处理、车牌定位、字符分割、字符识别、结果输出等一系列算法运算,其运行流程如下图所示:(车牌识别原理示意图)那么高达99.7%的车牌识别率是怎样做到的?首先,相机成像是车牌识别的基础,稳定、优质的成像效果为高识别率奠定了坚实的基础;其次,现场安装调试是车牌识别的重要保障,专业的咨询服务部为每一个安装现场提供专业、合理的安装意见,角度、距离、补光灯调节等为高车牌识别识别率提供了有力的保障;再次,强大的识别算法。
一、核心算法支持丰富多样的功能:支持车牌种类繁多,工作模式灵活等。
车牌识别核心算法支持各类车牌:普通蓝牌、单层黄牌、双层黄牌、警车车牌、武警车牌、军队车牌(新军牌)、大使馆车牌、02式个性化车牌、教练车牌、农用车牌、挂车号牌、民航车牌、港澳出入境车牌、台湾车牌等。
支持线圈触发识别工作模式和视频流识别工作模式,灵活互补。
支持车身颜色识别,支持车标识别,支持车型识别。
二、鲁棒性强(鲁棒性即在异常场景、异常情况下均能正常工作,且有较高的识别率)针对反光车牌、逆光车牌、阴阳车牌、变形车牌、污损车牌、奔驰特殊车牌、倾斜车牌、低对比度车牌、雨雾天气车牌、过爆车牌、粘连边框车牌、相似字符等特殊情况,均有较高的车牌识别率。
三、算法实时性线圈触发工作模式,单帧耗时500ms左右;视频流识别模式,单帧耗时100ms左右。
综上所述,无论从核心软件、智能硬件还是强大的售前、售后服务体系,易泊时代都有强大的支持,因此车牌识别率99.7%,必须这么高,也必然这么高!。

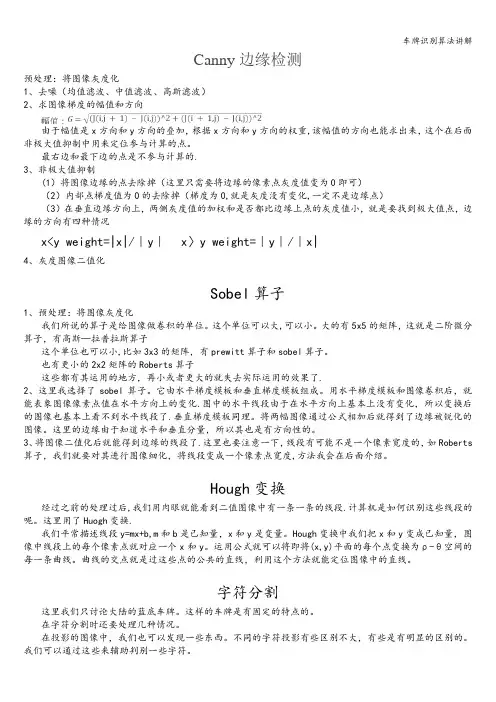
Canny边缘检测预处理:将图像灰度化1、去噪(均值滤波、中值滤波、高斯滤波)2、求图像梯度的幅值和方向由于幅值是x方向和y方向的叠加,根据x方向和y方向的权重,该幅值的方向也能求出来,这个在后面非极大值抑制中用来定位参与计算的点。
最右边和最下边的点是不参与计算的.3、非极大值抑制(1)将图像边缘的点去除掉(这里只需要将边缘的像素点灰度值变为0即可)(2)内部点梯度值为0的去除掉(梯度为0,就是灰度没有变化,一定不是边缘点)(3)在垂直边缘方向上,两侧灰度值的加权和是否都比边缘上点的灰度值小,就是要找到极大值点,边缘的方向有四种情况x<y weight=|x|/|y|x〉y weight=|y|/|x|4、灰度图像二值化Sobel算子1、预处理:将图像灰度化我们所说的算子是给图像做卷积的单位。
这个单位可以大,可以小。
大的有5x5的矩阵,这就是二阶微分算子,有高斯—拉普拉斯算子这个单位也可以小,比如3x3的矩阵,有prewitt算子和sobel算子。
也有更小的2x2矩阵的Roberts算子这些都有其运用的地方,再小或者更大的就失去实际运用的效果了.2、这里我选择了sobel算子。
它由水平梯度模板和垂直梯度模板组成。
用水平梯度模板和图像卷积后,就能表象图像像素点值在水平方向上的变化.图中的水平线段由于在水平方向上基本上没有变化,所以变换后的图像也基本上看不到水平线段了.垂直梯度模板同理。
将两幅图像通过公式相加后就得到了边缘被锐化的图像。
这里的边缘由于知道水平和垂直分量,所以其也是有方向性的。
3、将图像二值化后就能得到边缘的线段了.这里也要注意一下,线段有可能不是一个像素宽度的,如Roberts 算子,我们就要对其进行图像细化,将线段变成一个像素点宽度,方法我会在后面介绍。
Hough变换经过之前的处理过后,我们用肉眼就能看到二值图像中有一条一条的线段.计算机是如何识别这些线段的呢。
这里用了Huogh变换.我们平常描述线段y=mx+b,m和b是已知量,x和y是变量。

![[优选文档]基于图像处理的车牌的自动识别PPT](https://uimg.taocdn.com/3beb09ed0740be1e640e9adc.webp)