人工神经网络的研究方法
- 格式:ppt
- 大小:317.50 KB
- 文档页数:51
人工神经网络技术研究刘洋【摘要】以目前流行的数据挖掘中的人工神经网络技术为例,分析了其原理、主要功能、结构及工作方式等几方面,并指出了人工神经网络技术未来的研究方向及发展趋势.【期刊名称】《农业网络信息》【年(卷),期】2013(000)009【总页数】3页(P29-31)【关键词】人工神经网络;信息处理;网络算法【作者】刘洋【作者单位】内蒙古师范大学,内蒙古呼和浩特010022【正文语种】中文【中图分类】S1261 人工神经网络原理人工神经网络是在现代神经生物学研究基础上提出的模拟生物过程以反映人脑某些特性的计算结构。
它不是人脑神经系统的真实描写,而只是某种抽象、简化和模拟[1]。
在人工神经网络中,神经元常被称为“处理单元”。
有时从网络的观点出发常把它称为“节点”。
人工神经元是对生物神经元的一种形式化描述,它对生物神经元的信息处理过程进行抽象,并用数学语言予以描述;对生物神经元的结构和功能进行模拟,并用模型因子予以表达。
图1 神经元结构模型人工神经元的输出也同生物神经元一样仅有一个,如用Oj表示神经元输出,则输出与输入之间的对应关系可用图1中的某种函数来表示,这种函数称为转移函数,一般都是非线性的。
常用的函数有:阈值型转移函数、分段线性转移函数、非线性转移函数。
2 人工神经网络主要功能2.1 分类神经网络对外界输入样本具有很强的识别与分类能力。
对输入样本的分类实际上是在样本空间中找出符合分类要求的分割区域,每个区域内的样本属于同一类。
传统分类方法只适合解决同类相聚,异类分离的识别与分类问题。
但客观世界中的许多事物在样本空间上的区域分割曲面是十分复杂的,相近的样本可能属于不同的类,而远离的样本可能同属一类。
神经网络可以很好地解决对非线性曲面的逼近,因此比传统的分类器有更好的分类能力。
2.2 非线性映射在客观世界中,许多系统的输入与输出之间存在复杂的非线性关系,对于这类系统,往往很难用传统的数理方法建立数学模型。
人工智能的研究方法人工智能(Artificial Intelligence,简称AI)是计算机科学的一个分支,涉及研究、开发和应用计算机系统具有智能的能力,例如学习、推理、理解自然语言和感知环境等。
为了实现人工智能的目标,研究者们采用了多种研究方法和技术,下面将介绍几种主要的研究方法。
一、规则推理规则推理是一种基于规则的人工智能研究方法。
研究者通过定义一系列规则和逻辑关系,来使计算机系统进行推理和决策。
这些规则可以使用逻辑语言来描述,例如一阶逻辑或谓词逻辑。
通过对现实世界的知识进行建模,计算机可以根据这些规则进行逻辑推理,并做出符合逻辑的决策。
规则推理方法具有明确的逻辑基础和可解释性,但在面对复杂的问题时,规则的定义和推理逻辑往往非常复杂,限制了其应用范围。
二、机器学习机器学习是一种基于数据的人工智能研究方法。
研究者通过训练计算机系统使用大量的数据来提取模式和规律,并根据这些模式和规律来进行预测和决策。
机器学习可以分为监督学习、无监督学习和增强学习等不同的方法。
监督学习通过给定输入数据和相应的标签,训练模型来预测新的输入数据的标签。
无监督学习则是通过分析输入数据的统计特征和结构,来发现数据的隐藏模式和关系。
增强学习是一种通过试错的方式,通过与环境的交互来学习最优的行为策略。
机器学习方法具有较强的智能学习能力和适应性,但需要大量的数据和计算资源。
三、深度学习深度学习是机器学习的一个重要分支,通过使用人工神经网络模型来实现对数据的学习和理解。
深度学习模型通常由多层神经网络组成,每一层都有大量的神经元节点,通过相互连接来进行信息传递和处理。
深度学习模型可以自动抽取和学习数据的特征表示,具有较强的表征能力和学习能力。
深度学习在计算机视觉、自然语言处理等领域取得了很多突破性的成果,但其模型参数较多,训练过程较为复杂,需要大量的计算资源和训练数据。
四、进化计算进化计算是一种受自然进化过程启发的研究方法,通过模拟自然选择、遗传变异和适应度评估等过程,优化计算机系统的性能和表现。
基于人工神经网络的转轮除湿系统建模方法研究丛华;杨永利;江鹏程;冯辅周;张红星;李耀凯;郝晋峰【摘要】转轮除湿系统具有除湿精确度高且能耗低的优点,但其除湿机理相对复杂,除湿过程具有很强的非线性和时变性,对其建模具有一定难度.现有的建模手段以物理方法为主,建模过程复杂且模型误差大.本文引入了神经网络技术,建立了转轮除湿系统的两种神经网络模型——反向传播(BP)网络模型和径向基函数(RBF)网络模型,通过对两种模型进行运算分析,可知两种神经网络对于转轮除湿系统具有良好的适用性,同时RBF网络模型具有较高的精度,应用前景较好.【期刊名称】《可再生能源》【年(卷),期】2016(034)001【总页数】6页(P125-130)【关键词】转轮除湿;人工神经网络;建模;BP网络;RBF网络【作者】丛华;杨永利;江鹏程;冯辅周;张红星;李耀凯;郝晋峰【作者单位】装甲兵工程学院机械工程系,北京100072;装甲兵工程学院机械工程系,北京100072;装甲兵工程学院机械工程系,北京100072;装甲兵工程学院机械工程系,北京100072;太原卫星发射中心,山西太原030027;太原卫星发射中心,山西太原030027;太原卫星发射中心,山西太原030027【正文语种】中文【中图分类】TK83转轮除湿系统(下文简称为转轮系统)是一种固体除湿设备,主要依靠固体吸附材料,如硅胶、氯化锂、溴化锂、活性氧化铝、硅化钛、分子筛等,吸收处理空气中的水分子,进而达到除湿目的。
与冷却除湿相比,转轮除湿具有更好的调节精度,对低温空气仍然具有很好的除湿效果,且除湿能力大,同时可减少氯氟烃的使用,因而被广泛应用在空调领域。
建立合理的模型是研究转轮系统除湿特性和控制的基础。
现有的转轮系统建模方法以物理建模方法和实验方法为主。
Zheng[1]从热力学和流体力学角度出发,建立了除湿过程的物理模型,并进行了仿真研究;Antonellis[2]研究了物理建模方法,并以实验进行了验证,证明了物理模型的可行性;Wang[3]研究了除湿过程的物理模型,在此基础上研究了转轮的优化控制策略;Lee[4]在物理模型的基础上,开发了一种与维数无关的转轮除湿行为模型,该模型的准确度为12%;Antonellis[5]提出了一种基于实验数据的模型修正建模方法,在给定修正算法和公式的基础上,计算修正参数,获得了较高的精确度;Ruivo[6]在实验数据的基础上,研究了基于插值方法的除湿特性模型。
人工神经网络理论简介人工神经网络是基于模仿生物大脑结构和功能而构成的一种信息处理系统。
由于人工神经网络具有复杂的动力学特性、并行处理机制、学习、联想和记忆等功能,以及它的高度自组织、自适应能力和灵活活性而受到自然科学领域学者和各行业应用专家的广泛重视[31]。
4.1 神经网络的特点神经网络实际上是由大量简单元件相互连接而成的复杂网络,具有高度的非线性,能够进行复杂的逻辑操作和非线性关系实现的系统。
神经网络吸取了生物神经网络的许多优点,因而有其固有的特点[32]:1、分布式存储信息。
其信息的存储分布在不同的位置,神经网络是用大量神经元的连接及对各连接权值的分布来表示特定的信息,从而使网络在局部网络受损或输入信号因各种原因发生部分畸变时,仍然能够保证网络的正确输出,提高网络的容错性和鲁棒性。
2、并行协同处理信息。
神经网络中的每个神经元都可根据接收到的信息进行独立的运算和处理,并输出结果,同一层中的各个神经元的输出结果可被同时计算出来,然后传输给下一层做进一步处理,这体现了神经网络并行运算的特点,这个特点使网络具有非常强的实时性。
虽然单个神经元的结构及其简单,功能有限,但大量神经元构成的网络系统所能实现的行为是极其丰富多彩的。
3、良好的容错性与联想记忆功能。
神经网络通过自身的网络结构能够实现对信息的记忆。
而所记忆的信息是存储在神经元之间的权值中。
从单个权值中看不出所存储的信息内容,因而是分布式的存储方式。
这使得网络具有良好的容错性,并能进行聚类分析、特征提取、缺损模式复原等模式信息处理工作;又宜于做模式分类、模式联想等模式识别工作。
4、对信息的处理具有自组织、自学习的特点,便于联想、综合和推广。
神经网络的神经元之间的连接强度用权值大小表示,这种权值可以通过对训练样本的学习不断变化,而且随着训练样本量的增加和反复学习,这些神经元之间的连接强度会不断增加,从而提高神经元对这些样本特征的反应灵敏度。
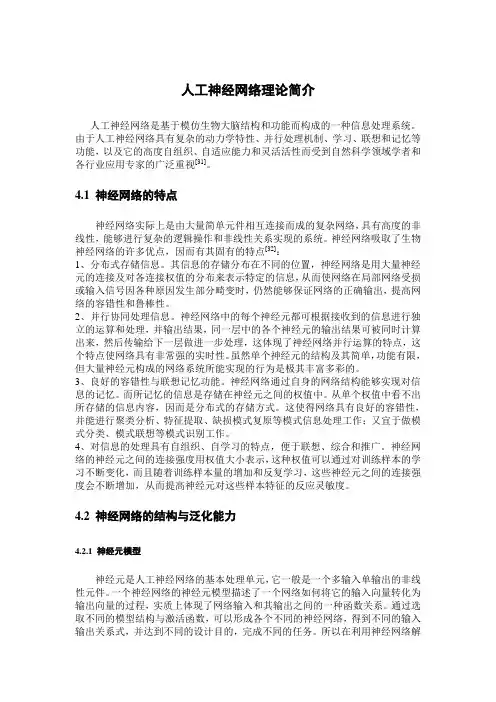
4.2 神经网络的结构与泛化能力4.2.1 神经元模型神经元是人工神经网络的基本处理单元,它一般是一个多输入单输出的非线性元件。

基于神经网络的机器人动力学建模与控制方法研究机器人技术的快速发展为人工智能领域的发展提供了重要支撑和应用场景。
机器人的关键技术之一就是动力学建模与控制方法。
传统的机器人动力学建模方法基于物理力学原理和运动学方程,需要测量物理量进行计算。
然而,现代机器人的运动过程非常复杂,难以获得准确的物理量测量数据,因此难以用传统方法进行精确建模。
近年来,神经网络技术的快速发展为机器人动力学建模与控制提供新思路和新方法。
一、神经网络的基本原理神经网络是一种模拟人类神经系统工作机制的计算模型。
它是由多个神经元相互连接组成的网络结构。
每个神经元接收来自上一层的神经元输出信号,并将它们相加后通过激活函数产生输出信号,从而输出到下一层神经元。
神经网络的模型具有高度的非线性和自适应性,能够从大量的数据中学习并捕捉到数据的内在规律。
二、基于神经网络的机器人动力学建模方法机器人动力学建模是机器人控制的重要基础。
基于神经网络的机器人动力学建模方法从数据出发,利用神经网络进行非线性拟合和预测,并将预测结果作为机器人模型的输入量。
该方法不需要具体的物理量测量,只需要大量的机器人运动数据,就可以进行精确的机器人动力学建模。
在基于神经网络的机器人动力学建模方法中,首先需要从机器人中获取大量的运动数据。
这些数据包括机器人在不同姿态下的运动轨迹、角速度和加速度等物理量。
然后利用这些数据训练神经网络模型。
模型的输入层是机器人的状态量,如关节位移、关节速度、末端位置、末端速度等。
输出层是机器人的动力学参数,如惯性矩阵、科氏力矩、重力矩等。
通过训练得到的神经网络模型就可以预测机器人的动力学参数。
三、基于神经网络的机器人控制方法基于神经网络的机器人控制方法是将机器人动力学建模和控制相结合,实现对机器人的精确控制。
该方法首先利用神经网络对机器人进行动力学建模,然后在控制过程中利用神经网络预测机器人的状态量和动力学参数,并进行控制。
该方法不仅能够实现机器人的高精度控制,还能够自适应环境变化和机器人自身的非线性特性。

人工智能主要研究方法
人工智能研究的主要研究方法如下:
1.结构模拟,神经计算。
所谓结构模拟,就是根据人脑的胜利结构和工作机理,实现计算机的智能,即人工智能。
我们知道,人脑的生理结构是由大量神经细胞组成的神经网络。
人脑是一个动态的、开放的、高度负责的巨系统,以至于人们至今对它的生理结构和工作机理还未完全弄清楚。
2、功能模拟,符号推演。
由于人脑的奥秘至今还未彻底揭开,所以,人们就在当前的数字计算机上,对人脑从功能上进行模拟,实现人工智能。
这种途径称为功能模拟法。
具体的来说,功能模拟法就是以人脑的心理模型,将问题或者知识表示成某种逻辑网络,采用符号推演的方法,实现搜索、推理、学习等功能,从宏观上来模拟人脑的思维,实现机器智能。
3.行为模拟,控制进化。
除了上述两种研究途径和方法外,还有一种基于感知-行为模型的研究途径和方法。
我们称其为行为模拟法。
这种方法是模拟人在控制过程中的智能活动和行为特性,如自寻优、自适应、自学习、自组织等,来研究和实现人工智能。
人工神经网络的最新发展综述摘要:人工神经网络是指模拟人脑神经系统的结构和功能,运用大量的处理部件,由人工方式建立起来的网络系统。
该文首先介绍了神经网络研究动向,然后介绍了近年来几种新型神经网络的基本模型及典型应用,包括模糊神经网络、神经网络与遗传算法的结合、进化神经网络、混沌神经网络和神经网络与小波分析的结合。
最后,根据这几种新型神经网络的特点,展望了它们今后的发展前景。
关键词:模糊神经网络;神经网络与遗传算法的结合;进化神经网络;混沌神经网络;神经网络与小波分析。
The review of the latest developments in artificial neuralnetworksAbstract:Artificial neural network is the system that simulates the human brain’s structure and function, and uses a large number of processing elements, and is manually established by the network system. This paper firstly introduces the research trends of the neural network, and then introduces several new basic models of neural networks and typical applications in recent years, including of fuzzy neural network, the combine of neural network and genetic algorithm, evolutionary neural networks, chaotic neural networks and the combine of neural networks and wavelet analysis. Finally, their future prospects are predicted based on the characteristics of these new neural networks in the paper.Key words: Fuzzy neural network; Neural network and genetic algorithm; Evolutionary neural networks; Chaotic neural networks; Neural networks and wavelet analysis1 引言人工神经网络的研究始于20世纪40年代初。
神经网络控制技术研究及其应用神经网络控制技术是一种将人工神经网络应用于控制系统的技术,它是近年来发展非常迅速的一种新兴技术。
神经网络控制技术具有自适应性和学习能力等优点,可以较好地解决传统控制技术无法解决的问题,因此在航天、工业、交通等领域得到了广泛应用。
一、神经网络控制技术的基本原理神经网络是一种模拟生物神经网络的计算模型,它由许多互相连接的处理单元组成,每个单元都能够接受、处理并传递信息。
神经网络控制技术通过建立神经网络模型实现对复杂控制系统的控制。
根据神经网络的学习能力,可以通过输入输出数据来训练神经网络模型,不断修正连接权值,使得神经网络的输出符合系统的实际要求。
同时,神经网络也可以实现自适应控制,根据系统的实时响应情况,调整控制策略,使系统始终处于最佳工作状态。
二、神经网络控制技术的应用1. 工业自动化在工业自动化领域,神经网络控制技术可以广泛应用于电力系统、化工过程、废气处理等方面。
例如,在电力系统中,神经网络控制技术可以根据电网的实时负荷情况进行自适应调节,实现对电力系统的优化控制,提高其稳定性和可靠性。
2. 交通运输在交通运输领域,神经网络控制技术可以被应用于智能交通系统、车辆控制、航空航天等方面。
例如,在智能交通系统中,神经网络控制技术可以根据道路流量情况自适应调节信号灯时间,优化交通流量,提高道路通行效率。
3. 机器人控制在机器人控制领域,神经网络控制技术可以被应用于机器人动作规划、姿态控制、机器人视觉等方面,可以实现复杂机器人控制和运动控制。
例如,在机器人视觉方面,神经网络控制技术可以通过对大量图像进行学习和识别,实现智能机器人视觉控制。
三、神经网络控制技术的发展趋势随着信息技术的飞速发展,神经网络控制技术也将得到进一步的拓展。
未来,神经网络控制技术将在多智能体控制、网络化控制、自主控制等方面发挥更大作用。
此外,基于深度学习的神经网络控制技术也是一个重要的发展方向,它将更好地应用于各种控制系统中,实现更为高效和智能的控制。
大脑神经网络的拓扑结构和功能研究大脑是人类最神奇的机器,它拥有无与伦比的处理能力和学习能力,这使得人们在探索神经科学时深感兴趣,尤其是研究大脑神经网络的拓扑结构和功能。
现代神经科学研究表明,大脑是由复杂的神经元和突触相互联接形成的神经网络,其拓扑结构和功能具有非常显著的复杂性。
一、神经元和突触的基本特征神经元是构成大脑神经网络的最基本单位,它负责传递神经信号,是最关键的信息处理单元。
神经元通常具有细长的纤维,称为神经纤维,不同的神经元的形态和功能差异很大。
神经细胞体内有许多神经元突起,它们用来接收和传递神经信号,并与其他神经元连接形成突触,从而实现信息的传递。
突触是神经网络的基本组成部分,是神经元间信息传递的地方。
二、神经网络拓扑结构的形成神经元之间的连接形式非常复杂,如今,科学家们已经探索了许多神经网络的拓扑结构,并发现了它们具有的共性和特点。
最早的神经网络研究方法是假设随机连接,但这并不能解释大脑中大量区域特异性的现象。
随后提出了美洲大脑基线模型(BCM,Brain Connectivity Model),它将神经网络视为一个一维链上的神经元排列而成网络,证明了这种模型可以从不同神经元之间的竞争关系,推导出计算振荡的响应。
最近发现的关于神经元之间空间关联的拓扑结构和计算可塑性的关系同时显示了,随机连接并不是最自然的网络结构。
大量的实验和理论研究表明,神经网络的拓扑结构对其功能和行为有重要影响。
研究已经显示出,具有更好的性能的网络必须拥有更好的拓扑结构,例如,具有更好的容错性,能够防止各种神经疾病的发生。
三、神经网络功能和拓扑结构的关系神经网络的拓扑结构对其功能和行为影响很大。
科学家们已经发现了许多神经元之间的关联方式,例如邻近关联、小世界网络和尺度无关网络等。
这些拓扑结构有助于实现大脑的各种功能,如感觉、认知、控制和情感等。
神经网络往往有强大的学习能力,这最大程度地归功于神经网络中神经元之间的突触连接的调整,以适应不同的学习环境。
人工神经网络知识概述人工神经网络(Artificial Neural Networks,ANN)系统是20世纪40年代后出现的。
它是由众多的神经元可调的连接权值连接而成,具有大规模并行处理、分布式信息存储、良好的自组织自学习能力等特点。
BP(Back Propagation)算法又称为误差反向传播算法,是人工神经网络中的一种监督式的学习算法。
BP 神经网络算法在理论上可以逼近任意函数,基本的结构由非线性变化单元组成,具有很强的非线性映射能力。
而且网络的中间层数、各层的处理单元数及网络的学习系数等参数可根据具体情况设定,灵活性很大,在优化、信号处理与模式识别、智能控制、故障诊断等许多领域都有着广泛的应用前景。
人工神经元的研究起源于脑神经元学说。
19世纪末,在生物、生理学领域,Waldeger等人创建了神经元学说。
人们认识到复杂的神经系统是由数目繁多的神经元组合而成。
大脑皮层包括有100亿个以上的神经元,每立方毫米约有数万个,它们互相联结形成神经网络,通过感觉器官和神经接受来自身体内外的各种信息,传递至中枢神经系统内,经过对信息的分析和综合,再通过运动神经发出控制信息,以此来实现机体与内外环境的联系,协调全身的各种机能活动。
神经元也和其他类型的细胞一样,包括有细胞膜、细胞质和细胞核。
但是神经细胞的形态比较特殊,具有许多突起,因此又分为细胞体、轴突和树突三部分。
细胞体内有细胞核,突起的作用是传递信息。
树突是作为引入输入信号的突起,而轴突是作为输出端的突起,它只有一个。
树突是细胞体的延伸部分,它由细胞体发出后逐渐变细,全长各部位都可与其他神经元的轴突末梢相互联系,形成所谓“突触”。
在突触处两神经元并未连通,它只是发生信息传递功能的结合部,联系界面之间间隙约为(15~50)×10米。
突触可分为兴奋性与抑制性两种类型,它相应于神经元之间耦合的极性。
每个神经元的突触数目正常,最高可达10个。
各神经元之间的连接强度和极性有所不同,并且都可调整、基于这一特性,人脑具有存储信息的功能。