无人机硬件解读
- 格式:pdf
- 大小:425.08 KB
- 文档页数:9
无人机零部件及其功能介绍1. 无人机概述无人机(Unmanned Aerial Vehicle, UAV)是一种无人驾驶的飞行器,利用先进的导航和控制系统,可以自主飞行、执行任务并完成任务。
无人机在军事、民用和商业领域都有广泛的应用,如侦察、目标跟踪、环境监测、农业植保等。
2. 无人机主要部件2.1 飞行器平台无人机的基础结构,包括机体、机翼、起落架等部分,提供飞行器的整体支撑和操控。
根据不同任务需求,可以选择不同类型的飞行器平台,如固定翼、旋翼或飞艇等。
2.2 动力系统为无人机提供飞行动力,包括发动机、电动机、电池等部件。
根据飞行器平台的不同,动力系统的类型和功率也会有所不同。
2.3 导航控制系统用于无人机的自主飞行和操控,包括GPS、惯性测量单元(IMU)、控制单元等部件。
导航控制系统能够根据预设的航线或实时指令,实现精准的航行和姿态控制。
2.4 任务载荷安装在无人机上的设备,用于执行特定的任务,如摄像头、传感器、通信设备等。
任务载荷的类型和数量取决于无人机的应用领域和任务需求。
3. 无人机次要部件3.1 通信系统实现无人机与地面控制站之间的数据传输和指令接收,包括无线电、卫星通信等设备。
通信系统需要具备稳定、可靠的性能,以保证无人机在复杂环境中的正常工作。
3.2 传感器系统用于感知周围环境,为无人机提供导航和任务执行所需的信息,如高度计、气压计、温度传感器等。
传感器系统的种类和数量取决于无人机的应用领域和任务需求。
3.3 防护系统保护无人机及其主要部件不受外部环境的影响,如防水、防尘、防雷等设备。
防护系统的设计和配置取决于无人机的应用环境和任务需求。
4. 无人机功能介绍4.1 侦察与监视无人机可以利用搭载的摄像头和其他传感器进行侦察与监视任务。
它们可以飞行到目标区域上空,获取高分辨率的图像和视频资料,实时传输给地面控制站。
这种技术广泛应用于军事领域,为指挥员提供实时情报支持。
4.2 目标跟踪与打击无人机可以跟踪并锁定目标,进行打击或摧毁。

无人机结构组成及各部分作用《无人机结构组成及各部分作用》周末,我和好友小明去公园玩。
一进公园,就看到一群人围在一起,时不时发出惊叹声。
我俩好奇地挤进去一看,原来是一个小伙子在操控着一架无人机呢。
那无人机在空中灵活地穿梭、盘旋,一会儿高飞,仿佛要触摸蓝天;一会儿低掠,像是在和草地上的小动物打招呼。
小明眼睛都看直了,他捅捅我,说:“这无人机可太酷了,你说它是怎么做到这么听话的呢?”我笑了笑,开始给他讲起无人机的结构组成以及各部分的作用。
咱们先来说说无人机的机身,这就好比是无人机的身体,所有的部件都安装在它上面。
就像人的身体一样,要是身体不结实,那可啥都干不了。
无人机的机身需要足够坚固,才能承受住其他部件的重量,还能抵抗飞行时的气流冲击呢。
你看那小伙子操控的无人机,机身看起来不大,但却是用很特殊的材料做的,这样才能保证在各种复杂的飞行情况下都不会散架。
再看看那几个伸出来的机翼,这可是无人机飞行的关键部分,就像鸟儿的翅膀一样重要。
机翼的形状和设计很有讲究,它们能产生升力,让无人机飞起来。
机翼就像是无人机的魔法翅膀,只要转动起来,就可以带着无人机在空中翱翔。
而且机翼上通常还会有一些小部件,像是襟翼之类的,它们就像机翼的小助手,能调整机翼的形状,从而控制无人机的飞行姿态。
比如说,当无人机想要转弯的时候,这些小部件就会发挥作用,就像汽车的方向盘一样,让无人机顺利地改变方向。
还有那位于无人机底部的起落架,这部分虽然看起来不太起眼,但作用可不小呢。
它就像无人机的脚,当无人机起飞和降落的时候,就靠它来支撑整个机身。
就像咱们人走路得有双脚一样,无人机的起落架要能够稳稳地站在地上,在起飞的时候又能迅速地离开地面,在降落的时候轻柔地接触地面,保证无人机的安全。
我指着正在降落的无人机对小明说:“你看,那起落架就像一个贴心的小保镖,在关键的时刻发挥着巨大的作用。
”然后就是无人机的动力系统啦,这可是无人机的心脏。
一般来说,常见的有电动的和燃油的。
无人机的构造及飞行原理简析(一)不同无人机的构造是不一样的,上期我们大概讲了四种比较常见的无人机类型:多旋翼无人机、无人直升机、固定翼无人机、垂直起降固定翼无人机。
本期我们将先为大家讲解多旋翼无人机的构造及飞行。
多旋翼无人机,顾名思义就是由多个旋翼组成的无人机啦。
现今多旋翼无人机应用于多个行业领域,常见的有森林防火、电力巡线、航拍航测、影视拍摄、土地规划、农业飞防喷洒、环保检查、现场救援、交通疏导等行业都用到了无人机。
在无人机采购中多旋翼无人机又有四旋翼、六旋翼、八旋翼这3款不同类型在稳定性、外形尺寸上都有着不同之处。
下面让我们看一下四旋翼无人机的基本构造图:四旋翼无人机的构成基本硬件有:飞行控制计算机(飞行控制器)、飞机支架、电机、旋翼。
无人机的飞行控制计算机是无人机的核心,在飞机中的作用相当于“人”的大脑,对无人机的稳定性、数据传输的可靠性、精确度、实时性等都有重要影响,对其飞行性能起决定性的作用。
其系统一般由又由传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。
传感器:多轴无人机机身大量装配的各种传感器,包括GPS、气压计、陀螺仪、指南针以及地磁感应等,可以采集角速率、姿态、位置、加速度、高度和空速等,是飞控系统的基础。
机载计算机:机载计算机作为无人机的CPU,是飞控的中枢系统,类似于人体大脑的中枢神经,负责整个无人机姿态的运算和判断;同时,也操控着传感器和伺服作动设备。
伺服作动设备:人机执行机构都是伺服作动设备,是导航飞控系统的重要组成部分。
其主要功能是根据飞控计算机的指令,按规定执行动作。
对于固定翼无人机来说,主要通过调整机翼角度和发动机运转速度,实现对无人机的飞行控制。
飞行原理说完多旋翼无人机的基本构造,那么我们就好开始介绍其的飞行原理是怎么样的了,还是以四旋翼无人机为例。
如下图所示,三角形箭头表示飞机的机头朝向,螺旋桨M1、M3的旋转方向为逆时针,螺旋桨M2、M4的旋转方向为顺时针。
1、首先介绍的是无人机的大脑——飞控无人机飞行控制系统是指能够稳定无人机飞行姿态,并能控制无人机自主或半自主飞行的控制系统,是无人机的大脑,也是区别于航模的最主要标志,简称飞控。
飞控的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成)。
如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢、升力变小,自然就不再向左倾斜。
如果没有飞控系统,四轴飞行器就会因为安装、外界干扰、零件之间的不一致等原因形成飞行力量不平衡,后果就是左右、上下地胡乱翻滚,根本无法飞行。
工作过程大致如下:飞控系统实时采集各传感器测量的飞行状态数据、接收无线电测控终端传输的由地面测控站上行信道送来的控制命令及数据,经计算处理,输出控制指令给执行机构,实现对无人机中各种飞行模态的控制和对任务设备的管理与控制;同时将无人机的状态数据及发动机、机载电源系统、任务设备的工作状态参数实时传送给机载无线电数据终端,经无线电下行信道发送回地面测控站。
飞控系统的硬件主要包括:主控制模块、信号调理及接口模块、数据采集模块以及舵机驱动模块等。
2、为传感器增稳的——云台稳定平台,对于任务设备来说太重要了,是用来给相机增稳的部分,几千米的高度上误差个几分几秒就能差出去几十米。
它主要通过传感器感知机身的动作,通过电机驱动让相机保持原来的位置,抵消机身晃动或者震动的影响。
云台主要考察几个性能:增稳精度、兼容性(一款云台能适配几款相机和镜头)和转动范围(分为俯仰、横滚和旋转三个轴),如果遇到变焦相机,就更加考验云台的增稳精度了,因为经过长距离的变焦,一点点轻微的震动都会让画面抖动得很厉害。
现时的航拍云台主要由无刷电机驱动,在水平、横滚、俯仰三个轴向对相机进行增稳,可搭载的摄影器材从小摄像头到GoPro,再到微单/无反相机,甚至全画幅单反以及专业级电影机都可以。
摄影器材越大,云台就越大,相应的机架也就越大。
上面三个演示的是机身不动、相机动的效果,但实际上云台工作时,是相机不动,而机身动。
多旋翼无人机的结构组成多旋翼无人机的结构组成多旋翼无人机是一种新型的无人机设备,由于其灵活多变的飞行方式,已经在军事、民用、科研等领域得到广泛的应用。
在这里,我们将从多旋翼无人机的结构组成方面进行介绍,以帮助大家更加了解这一设备。
一、框架结构框架结构是多旋翼无人机的骨架,其主要组成部分是底盘、支腿和中央马达支架等。
底盘是用于支撑无人机航空设备的主体部分,是多旋翼无人机的重要组成部分。
支腿主要用于支撑无人机的重量,使无人机能够稳定地静止在空中。
中央马达支架是用来安装电机的部件,电机负责驱动桨叶运转。
二、无人机外壳无人机外壳是多旋翼无人机的保护罩,其主要功能是保护无人机的内部部件,同时减少无人机在飞行过程中的阻力,提高空气动力学性能。
外壳的选材和加工工艺对多旋翼无人机的精度和稳定性有很大的影响。
目前,一般采用碳纤维、玻璃钢等材料来制造外壳。
三、主控制板主控制板是多旋翼无人机电路的核心,承载着多旋翼无人机的系统稳定性和性能。
它能够控制飞行器在空中的姿态、高度、飞行方向等。
通过与调速器、电机和遥控器等设备的配合工作,可以实现多旋翼无人机的安全起飞、飞行、降落等功能。
四、电机与电调电机与电调是多旋翼无人机的动力设备,负责产生推力、驱使桨叶旋转,从而实现多旋翼无人机在空中飞行的目的。
电调根据遥控器的指令调整电机的速度,以控制多旋翼无人机的飞行高度和方向。
不同类型的无人机需要不同数量和规格的电机和电调来完成权衡稳定性和飞行性能的设计。
五、传感器和控制器传感器和控制器是多旋翼无人机的智能设备。
传感器负责收集无人机周围的地面、空气、气压等信息,并将这些信息发送到控制器进行处理。
控制器根据这些信息来计算控制多旋翼无人机的姿态、高度、速度等参数,然后通过电机和电调来控制飞行器的方向和速度。
六、摄像头和图传设备摄像头和图传设备是多旋翼无人机的智能设备,可以对周围环境进行拍摄和图像传输。
典型的用途包括空中摄像和实时监控等。

一天精通无人机:初级篇系列第12讲:硬件清单与组装今天我们来一起谈谈硬件清单并组装一个多旋翼无人机。
需要提前说明的是,关于硬件组装是学习无人机的基本内容,而不是全部内容。
在把硬件组装起来只是完成了无人机的控制软件载体,而控制软件才是整个无人机的大脑。
所以我们今天来完成硬件的组装,在下一讲中再来学习如何使用无人机控制程序。
其实在前面的文章中我们已经大致了解了多旋翼无人机的飞行原理和基本硬件内容。
我们再来复习一下硬件清单,这里我们只是针对初学者做一些型号推荐,而对于那些对无人机已经很熟悉的读者来说可以根据自己的需要自行选材,(自驾仪采用Pixhaw 2.4.8 以后不再赘述):一、无刷电机推荐使用2312 960KV无刷电机。
无刷电机有几个常见指标:定子高度,定子宽度和电机KV值。
我们通常在看电机参数时,可以看到电机型号会注明2212 2216 2312等等,前两个数字表示的是电机写字的直径,后两个数字表示的是电机定子的高度,单位均是毫米。
例如:2206表示电机定子直径为22mm,定子厚度为6mm。
2312表示电机定子直径为23mm,定子高度为12mm。
2216表示电机定子直径为22mm,定子高度为16mm。
指标KV值表示电机在空载(不安装螺旋桨)的情况下,电压每增加1v,电机每分钟的转数增加多少。
电机KV值越小,说明电机的动力越大,但速度越低;而KV值越大,说明电机的动力越小,但速度越快。
你可以想像一下汽车的档位,档位越低(比如1档),发动机的动力越大,但速度越小;档位越高(比如5档),发动机的动力越小,但速度越快。
二、正反螺旋桨螺旋桨采用9045正反桨,螺旋桨在螺旋线方向上两个相邻螺纹之间的距离。
通常这个距离用英寸来表示,例如7045、8045、9045、1045这些指标的后两个数字表示其螺距为4.5英寸;7050、8050、9050、1050表示其螺距为5.0英寸。
而前两个数字,表示其直径的大小,例如:8045表示桨的直径为8.0英寸,9045表示桨的直径为9.0英寸,1045表示桨的直径是10英寸,而不是1.0英寸。
无人机构造与原理无人机,作为一种无人驾驶的航空器,近年来得到了广泛的应用和发展。
它具有灵活性高、成本低、风险小等优点,因此在军事、民用、科研等领域都有着重要的作用。
本文将从无人机的构造和原理两个方面进行介绍。
首先,我们来看无人机的构造。
无人机通常由机翼、机身、动力系统、控制系统等部分组成。
其中,机翼是无人机的承载部分,它能够提供升力和稳定性,一般采用翼型设计,以减小风阻,提高飞行效率。
机身是无人机的主体结构,它包含了能源系统、载荷舱、传感器等组件,同时还需要具备轻量化、高强度的特点。
动力系统是无人机的动力来源,一般采用涡轮发动机、螺旋桨或者喷气发动机等,以提供足够的动力推进飞行。
控制系统是无人机的大脑,它包括了导航系统、通信系统、自主控制系统等,能够实现无人机的自主飞行和任务执行。
其次,我们来了解一下无人机的原理。
无人机的飞行原理与传统飞机基本相同,都是依靠空气动力学原理来实现飞行。
当无人机的动力系统提供足够的推力时,机翼能够产生升力,使得无人机能够脱离地面进行飞行。
在飞行过程中,控制系统能够实时感知飞行环境,并对飞行姿态、速度、高度等参数进行调整,以确保无人机能够按照预定的轨迹进行飞行。
同时,无人机还可以通过导航系统实现定位和导航,以完成各种飞行任务。
综上所述,无人机的构造和原理是相互关联、相互作用的。
只有合理的构造才能支持无人机的正常运行,而无人机的原理又决定了它能够实现各种飞行任务。
随着科技的不断进步,无人机的构造和原理也在不断地得到改进和完善,相信在未来,无人机将会有更加广泛的应用和发展。
总之,无人机作为一种新型的航空器,其构造和原理对于其性能和功能起着决定性的作用。
通过本文的介绍,相信读者对于无人机的构造和原理有了更深入的了解,也希望无人机能够在未来发展中发挥更加重要的作用。
在今年CES上无人机成为了展会最大的热点之一,大疆(DJI)、Parrot、3D Robotics、AirDog等知名无人机公司都有展示他们的最新产品。
甚至是英特尔、高通的展位上展出了通信功能强大、能够自动避开障碍物的飞行器。
无人机在2015年已经迅速地成为现象级的热门产品,甚至我们之前都没有来得及细细研究它。
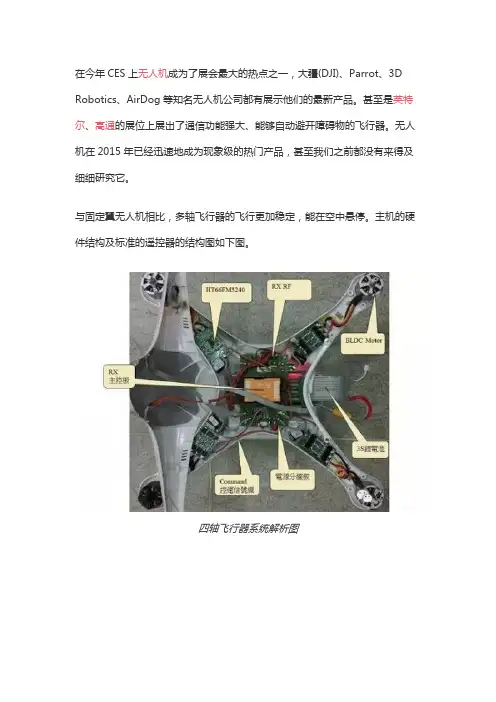
与固定翼无人机相比,多轴飞行器的飞行更加稳定,能在空中悬停。
主机的硬件结构及标准的遥控器的结构图如下图。
四轴飞行器系统解析图遥控器系统解析图以上只是标准产品的解剖图,有些更加高级的如针对航模发烧友和航拍用户们的无人机系统,还会要求有云台、摄像头、视频传输系统以及视频接收等更多模块。
飞控的大脑:微控制器在四轴飞行器的飞控主板上,需要用到的芯片并不多。
目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。
意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。
其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。
目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。
新唐的MCU负责人表示: 多轴飞行器由遥控, 飞控,动力系统, 航拍等不同模块构成, 根据不同等级产品的需求,会采用到不同CPU内核。
例如小四轴的飞行主控, 因功能单纯, 体积小, 必须同时整合遥控接收, 飞行控制及动力驱动功能;中高阶多轴飞行器则采用内建DSP 及浮点运算单元的, 负责飞行主控功能,驱动无刷电机的电调(ESC)板则采用MINI5系列设计。
低阶遥控器使用SOP20 封装的4T 8051N79E814;中高阶遥控器则采用Cortex-M0 M051系列。
另外, 内建ARM9及H.264视频边译码器的N329系列SOC则应用于2.4G及5.8G的航拍系统。
在飞控主板上,目前控制和处理用得最多的还是MCU而不是CPU。
无人机tf卡指标解读随着无人机的普及和应用越来越广泛,对于存储数据的需求也越来越大。
TF卡作为一种常用的存储媒介,对于无人机来说具有重要的作用。
本文将从容量、写入速度、读取速度等方面详细解读无人机TF卡的指标。
一、容量TF卡的容量是指能够存储的数据量大小。
常见的容量有8GB、16GB、32GB、64GB等等。
在选择TF卡容量时,需要根据无人机的需求来确定。
如果无人机用于拍摄视频,尤其是高分辨率的视频,那么容量就需要更大。
在选择时,要注意TF卡是否兼容无人机的储存系统,并选择适合的容量。
二、写入速度写入速度是指将数据从其他设备传输到TF卡的速度。
对于无人机来说,写入速度的快慢直接影响到拍摄过程中的数据传输效率。
如果写入速度太慢,可能导致数据丢失,影响拍摄体验。
因此,在选择TF卡时,要选择具有较快写入速度的产品。
三、读取速度读取速度是指从TF卡读取数据到其他设备的速度。
对于无人机来说,读取速度的快慢决定了无人机的数据传输效率。
如果读取速度过慢,可能会导致视频播放卡顿,数据传输不畅。
因此,在选择TF卡时,要选择具有较快读取速度的产品。
四、防震防护无人机在飞行过程中会受到各种外界因素的影响,如风力、震动等。
为了保护TF卡中的数据不受损,防震防护是非常重要的。
一些高性能的TF卡具有防水、抗震、抗静电等功能,可以在恶劣环境下保护数据的安全。
五、可靠性TF卡的可靠性是指在长时间使用过程中,能否保证数据的稳定性和安全性。
一些高品质的TF卡具有良好的可靠性,可以减少数据丢失和损坏的风险。
在选择TF卡时,要选择可靠性较高的产品。
六、价格TF卡的价格因其容量、性能和品牌而有所不同。
一般来说,容量越大,性能越好的TF卡价格会越高。
在选择时,要根据自身的需求和经济实力进行权衡,选择性价比较高的产品。
综上所述,无人机TF卡的指标涉及到容量、写入速度、读取速度、防震防护、可靠性以及价格等多个方面。
在选择TF卡时,需要综合考虑以上指标,根据无人机的需求和自身经济实力选择合适的产品。
导言:无人机之所以能够在空中自主飞行不光拥有电机、电调、飞控就可以的,除了这些,还有一样很重要的东西,那就是动力源。
在无人机中,动力能源分很多种,如汽油,柴油、航空煤油、甲醇、电能等能源。
本期为大家带来的解读是无人机的动力源,电池。
先给大家一个简单的例子;无人机具有一定的自动驾驶功能,相当于我们人一样,飞控是它的大脑,IMU是它的神经系统,GPS和超声波是它的眼睛,数传电台是它的耳朵和嘴巴,那么电机就是它的心脏,虽然这个比喻不太恰当,但是它和人们一样,也需要进食,那就是电能。
说起电池,我们并不陌生,但是真正对电池你们又有多少了解呢。
按照以往的惯例,我们还从最早的讲起。
电池有积层电池、铅酸电池、镍氢电池、镍镉电池、锂离子电池、锂聚合物电池、磷酸铁锂电池等很多种,无论是从容量方面划分,还是从用图方面划分,电池与电池还有很大的不同之处。
在航模里用的最多的就是锂聚合物电池,虽然同样都是锂聚合物电池,但是锂聚合物电池电池还有很大的区别。
先来说说电池种类及每个电池的特性,先从我们最早的电池说起。
我们经常见到的,体积比较大,塑料外壳,这种电池里边全是液体,电压一般是12伏特,应用于汽车的较多,没错,就是铅酸电池(VRLA),字母pb来表示,主要由两种不同的铅板构成和电解液(硫酸和蒸馏水)构成,通过化学反应存储的电能,1S额定电压2V,没电1,5伏,充满2.4伏,一般12伏的由六节2伏的串联组成。
这种电池不能倒放和侧放,否则会导致电解液流出;这种蓄电池体积大,又重,非常的笨重,其价格低廉,大部分用于汽车、电瓶车、船等场所。
铅酸电池走向市场后,另一种新型电池也在慢慢的流行开来,那就是镍镉电池,字母NI-CD。
这种电池外观与我们平常的干电池一模一样,并且通用,额定电压1.2v,放电截止电压1.0v,充电截止电压1.4v。
这种电池拥有着容量高,放电电流比干电池大,可快速充电,可重复使用500次以上等优点,逐渐的占有了手电筒、玩具车等市场。
无人机结构及原理无人机,又称为无人驾驶飞行器,是一种可以在无人操控的情况下自主飞行的飞行器。
它的结构和原理是无人机技术的核心,对于了解无人机的工作原理和设计制造至关重要。
一、无人机的结构。
无人机的结构通常包括机身、机翼、动力系统、控制系统和载荷系统等几个主要部分。
1. 机身。
无人机的机身是整个飞行器的主体,承载着其他各个部件。
机身的材料通常选择轻质高强度的材料,如碳纤维、玻璃钢等,以保证飞行器的轻量化和强度。
2. 机翼。
机翼是无人机的承载部件,起到支撑和平衡的作用。
通常采用对称翼型或者半对称翼型,以提高飞行器的升力和稳定性。
3. 动力系统。
无人机的动力系统通常由电动机、螺旋桨、电池等组成,也有部分无人机采用内燃机或者喷气发动机。
动力系统是无人机的动力来源,直接影响着飞行器的飞行性能。
4. 控制系统。
无人机的控制系统包括飞行控制系统和导航控制系统。
飞行控制系统通过遥控器或者自主飞行控制系统来控制飞行器的姿态和飞行方向;导航控制系统则负责飞行器的导航和定位。
5. 载荷系统。
载荷系统是无人机的附加设备,包括相机、传感器、通信设备等。
这些设备可以用于航拍、侦察、测绘等任务。
二、无人机的原理。
无人机的飞行原理主要是基于空气动力学和飞行动力学。
1. 空气动力学。
无人机的飞行受到空气动力学原理的影响,包括升力、阻力、推力等。
通过机翼的设计和控制,可以产生足够的升力来支撑飞行器的重量,并通过推力系统来推动飞行器前进。
2. 飞行动力学。
飞行动力学是研究飞行器在空气中运动规律的学科。
无人机的飞行动力学原理包括姿态稳定、飞行控制、导航定位等方面,通过飞行控制系统和导航控制系统来实现飞行器的稳定飞行和精确操控。
综上所述,无人机的结构和原理是相互关联的,结构的设计直接影响着飞行器的飞行性能,而飞行原理则决定了飞行器的飞行方式和控制方式。
只有深入理解无人机的结构和原理,才能更好地设计制造出性能优越、稳定可靠的无人机产品。
无人机标准解读一、无人机类型与分类无人机按照不同的分类标准可以分为多种类型。
根据飞行方式,无人机可分为固定翼无人机、多旋翼无人机、无人直升机等;根据用途,无人机可分为军用无人机、民用无人机等。
此外,无人机还可以根据其他特征进行分类,如航程、航时、载重等。
二、无人机系统技术要求无人机系统应满足以下技术要求:1.飞行控制系统:无人机应配备先进的飞行控制系统,确保无人机能够稳定、准确地飞行。
2.动力系统:无人机应具备高效、稳定的动力系统,确保无人机能够长时间、远距离飞行。
3.通信系统:无人机应具备可靠的通信系统,确保与地面控制站之间的数据传输和指令接收。
4.导航系统:无人机应配备高精度的导航系统,确保无人机能够准确导航和定位。
5.载荷系统:无人机应根据任务需求配备相应的载荷系统,如摄像头、传感器等。
三、无人机安全性要求1.稳定性要求:无人机应具备良好的稳定性,能够在不同气候、地形等环境下安全飞行。
2.抗干扰能力:无人机应具备抗电磁干扰能力,确保在复杂电磁环境下能够正常工作。
3.安全性防护:无人机应具备相应的安全性防护措施,如避障系统、紧急降落系统等,确保在遇到危险时能够及时采取措施保护人员和设备安全。
四、无人机环境适应性要求1.气候适应性:无人机应能够在不同的气候条件下正常工作,如高温、低温、雨雪等天气条件下。
2.海拔适应性:无人机应能够在不同海拔地区正常工作,如高原、山地等地区。
3.电磁环境适应性:无人机应能够在复杂的电磁环境下正常工作,如电磁干扰严重的地区。
五、无人机性能要求1.航程和航时:根据任务需求,无人机应具备相应的航程和航时能力,确保能够完成预定任务。
2.载荷能力:根据任务需求,无人机应具备相应的载荷能力,如重量、尺寸等,确保能够携带足够的任务载荷。
3.速度和爬升能力:根据任务需求,无人机应具备相应的速度和爬升能力,确保能够快速响应和执行任务。
4.操控性和机动性:根据任务需求,无人机应具备相应的操控性和机动性,确保能够灵活地执行各种任务。
无人机结构及原理无人机,又称无人驾驶飞行器,是一种可以在没有人员操控的情况下进行飞行任务的飞行器。
它的结构和原理是无人机技术的核心,对于了解无人机的工作原理和设计结构至关重要。
首先,我们来看无人机的结构。
无人机通常由机身、机翼、发动机、舵机、电池等部件组成。
机身是无人机的主体,承载着其他部件,同时也提供了空气动力学上的支撑和稳定。
机翼是无人机的承载部件,通过空气动力学原理提供升力,使无人机得以飞行。
发动机提供了动力,通常采用电动发动机或者燃油发动机。
舵机则用于控制飞行姿态,通过改变机翼和尾翼的角度来控制无人机的飞行方向。
电池则提供了无人机所需的电能。
其次,我们来了解无人机的工作原理。
无人机的飞行原理基本上和有人飞机相似,都是依靠空气动力学原理来提供升力,通过控制飞行姿态来实现飞行。
无人机的飞行控制主要依赖于飞行控制系统和导航系统。
飞行控制系统包括飞行控制器、陀螺仪、加速度计等传感器,通过这些传感器获取飞行状态信息,并通过控制舵机来调整飞行姿态。
导航系统则包括GPS、罗盘等设备,用于确定无人机的位置和航向,实现飞行导航。
此外,无人机的结构和原理也受到了不断的技术革新和改进。
随着材料科学、电子技术、通信技术等领域的发展,无人机的结构和原理也在不断地得到改进和优化。
例如,无人机的机身材料越来越轻、强度越来越高,提高了无人机的飞行性能;电子技术的发展使得飞行控制系统更加精密和稳定;通信技术的进步则为无人机的遥控和数据传输提供了更加可靠的保障。
总的来说,无人机的结构和原理是多个学科交叉的产物,它融合了航空学、电子学、材料科学等多个领域的知识。
通过对无人机的结构和原理的深入了解,可以更好地理解无人机的工作原理,为无人机的设计、制造和应用提供理论基础和技术支持。
希望本文能够帮助读者更加深入地了解无人机的结构和原理,为无人机技术的发展做出贡献。
无人机的基本结构和构造1. 无人机的基本认识嘿,朋友们!今天咱们来聊聊那些在天上飞得比你们家猫还自如的无人机。
首先,无人机可不是外星人派来的监视器,它们其实就是一些特别设计的飞行器。
听起来是不是很酷?无人机有很多用途,从拍照、测绘到快递送货,真的是应有尽有,简直是现代科技的“万金油”!1.1 无人机的结构说到无人机的基本结构,首先映入眼帘的就是它的“骨架”——机身。
这就像你我一样,没有一个好的身体,怎么能活得精彩呢?无人机的机身通常是用轻便但结实的材料制成的,像是碳纤维、塑料啥的,轻得像一片羽毛,但耐撞得像个小钢铁侠。
上面装着各种零部件,就像你早晨吃的丰盛早餐,各种营养应有尽有。
1.2 动力系统接下来,咱们得聊聊动力系统,这可是无人机飞起来的“灵魂”所在。
它的心脏就是电机和螺旋桨,简直就像你爱吃的炒饭一样,得有火才能香对吧?电机把电转化为动力,然后螺旋桨就像旋转的风扇,把空气推开,让无人机飞起来。
别小看这几个螺旋桨,转起来可是“风驰电掣”,飞速的让你眼花缭乱。
2. 无人机的导航系统现在咱们聊聊无人机是怎么找到路的。
这就像你出门前查地图一样,得知道去哪儿才行。
无人机的导航系统可复杂了,它依赖GPS、传感器和摄像头来确定自己的位置。
简单来说,GPS就像你身边那位总是管你行程的朋友,不断告诉无人机“左转”、“右转”,让它不迷路。
2.1 传感器的作用除了GPS,无人机上还有各种传感器,它们就像你的双眼,负责感知周围的环境。
比如,距离传感器能够告诉无人机离地面有多远,避免碰头;而光流传感器则用来判断飞行速度。
这样一来,无人机就能飞得稳稳的,不至于“摔得稀巴烂”。
2.2 摄像头的功能当然,很多无人机还配有摄像头,这可真是让人羡慕!它们可以拍摄高清照片和视频,捕捉那些“人间仙境”般的美景,简直就像是你的随身摄影师。
不过,拍摄的过程中可不能乱来,要不然就成了“偷拍大王”,可就不太好了。
3. 无人机的控制系统说完导航,咱们再来聊聊控制系统。
在今年CES上无人机成为了展会最大的热点之一,大疆(DJI)、Parrot、3D Robotics、AirDog等知名无人机公司都有展示他们的最新产品。
甚至是英特尔、高通的展位上展出了通信功能强大、能够自动避开障碍物的飞行器。
无人机在2015年已经迅速地成为现象级的热门产品,甚至我们之前都没有来得及细细研究它。
与固定翼无人机相比,多轴飞行器的飞行更加稳定,能在空中悬停。
主机的硬件结构及标准的遥控器的结构图如下图。
四轴飞行器系统解析图
遥控器系统解析图
以上只是标准产品的解剖图,有些更加高级的如针对航模发烧友和航拍用户们的无人机系统,还会要求有云台、摄像头、视频传输系统以及视频接收等更多模块。
飞控的大脑:微控制器
在四轴飞行器的飞控主板上,需要用到的芯片并不多。
目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。
意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。
其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。
目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。
新唐的MCU负责人表示:多轴飞行器由遥控,飞控,动力系统,航拍等不同模块构成,根据不同等级产品的需求,会采用到不同CPU内核。
例如小四轴的飞行主控,因功能单纯,体积小,必须同时整合遥控接收,飞行控制及动力驱动功能;中高阶多轴飞行器则采用内建DSP及浮点运算单元的,负责飞行主控功能,驱动无刷电机的电调(ESC)板则采用MINI5系列设计。
低阶遥控器使用SOP20封装的4T8051
N79E814;中高阶遥控器则采用Cortex-M0M051系列。
另外,内建ARM9及H.264视频边译码器的N329系列SOC则应用于2.4G及5.8G的航拍系统。
在飞控主板上,目前控制和处理用得最多的还是MCU而不是CPU。
由于对于飞行控制方面主要都是浮点运算,简单的ARM Cortex-M4内核32位MCU都可以很好的满足。
有的传感器MEMS芯片中已经集成了DSP,与之搭配的话,更加简单的8位单片机也可以做到。
高通和英特尔推的飞控主芯片
CES上我们看到了高通和英特尔展示了功能更为丰富的多轴飞行器,他们采用了比微控制器(MCU)更为强大的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。
例如,高通CES上展示的Snapdragon Cargo无人机是基于高通Snapdragon 芯片开发出来的飞行控制器,它有无线通信、传感器集成和空间定位等功能。
Intel CEO Brian Krzanich也亲自在CES上演示了他们的无人机。
这款无人机采用了“RealSense”技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。
英特尔的无人机是与一家德国工业无人机厂商Ascending
Technologies合作开发,内置了高达6个英特尔的“RealSense”3D摄像头,以及采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。
这两家公司在CES 展示如此强大功能的无人机,一是看好无人机的市场,二是美国即将推出相关法规,对无人机的飞行将有严格的管控。
此外,活跃在在机器人市场的欧洲处理器厂商XMOS也表示已经进入到无人机领域。
XMOS公司市场营销和业务拓展副总裁Paul Neil博士表示,XMOS的xCORE多核微控制器系列已被一些无人机/多轴飞行器的OEM客户采用。
在这些系统中,XMOS多核微控制器既用于飞行控制也用于MCU内部通信。
Paul Neil说:xCORE多核微控制器拥有数量在8到32个之间的、频率高达500MHz的32位RISC内核。
xCORE器件也带有Hardware Response I/O 接口,它们可提供卓越的硬件实时I/O性能,同时伴随很低的延迟。
“这种多核解决方案支持完全独立地执行系统控制与通信任务,不产生任何实时操作系统(RTOS)开销。
xCORE微控制器的硬件实时性能使得我们的客户能够实现非常精确的控制算法,同时在系统内无抖动。
xCORE多核微控制器的这些优点,正是吸引诸如无人机/多轴飞行器这样的高可靠性、高实时性应用用户的关键之处。
”
多轴飞行器需要用到四至六颗无刷电机(马达),用来驱动无人机的旋翼。
而马达驱动控制器就是用来控制无人机的速度与方向。
原则上一颗马达需要配置一颗8位MCU来做控制,但也有一颗MCU控制多个BLDC马达的方案。
多轴无人机的EMS/传感器
某无人机方案商总经理认为,目前业内的玩具级飞行器,虽然大部分从三轴升级到了六轴MEMS,但通常采用的都是消费类产品如平板或手机上较常用的价格敏感型型号。
在专业航拍以及专为航模发烧友开发的中高端无人机上,则会用到质量更为价格更高的传感器,以保障无人机更为稳定、安全的飞行。
这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。
飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化后,就可以控制电机向相反的方向转动,进而达到稳定的效果。
这是一个典型的闭环控制系统。
至于用MEMS传感器测量角度变化,一般要选择组合传感器,既不能单纯依赖加速度计,也不能单纯依赖陀螺仪,这是因为每种传感器都有一定的局限性。
比如说陀螺仪输出的是角速度,要通过积分才能获得角度,但是即使在零输入状态时,陀螺依然是有输出的,它的输出是白噪声和慢变随机函数的叠加,受此影响,在积分的过程中,必然会引进累计误差,积分时间越长,误差就越大。
这就需要加速度计来校正陀螺仪,因为加速度计可以利用力的分解原理,通过重力加速度在不同轴向上的分量来判断倾角。
由于没有积分误差,所以加速度计在相对静止的条件下可以校正陀螺仪的误差。
但在运动状态下,加速度计输出的可信度就要
下降,因为它测量的是重力和外力的合力。
较常见的算法就是利用互补滤波,结合加速度计和陀螺仪的输出来算出角度变化。
ADI亚太区微机电产品市场和应用经理表示,ADI产品主要的优势就是在各种恶劣条件下,均可获得高精度的输出。
以陀螺仪为例,它的理想输出是只响应角速度变化,但实际上受设计和工艺的限制,陀螺对加速度也是敏感的,就是我们在陀螺仪数据手册上常见的deg/sec/g的指标。
对于多轴飞行器的应用来说,这个指标尤为重要,因为飞行器中的马达一般会带来较强烈的振动,一旦减震控制不好,就会在飞行过程中产生很大的加速度,那势必会带来陀螺输出的变化,进而引起角度变化,马达就会误动作,最后给终端用户的直观感觉就是飞行器并不平稳。
除此之外,在某些情况下,如果飞行器突然转弯,可能会造成输入转速超过陀螺仪的测试量程,理想情况下,陀螺仪的输出应该是饱和输出,待转速恢复到陀螺仪量程范围后,陀螺仪再正确反应实时的角速度变化,但有些陀螺仪确不是这样,一旦输入超过量程,陀螺便会产生震荡输出,给出完全错误的角速度。
还有某些情况下,飞行器会受到较大的加速度冲击,理想情况陀螺仪要尽量抑制这种冲击,ADI的陀螺仪在设计的时候,也充分考虑到这种情况,利用双核和四核的机械结构,采用差分输出的原理来抑制这种“共模”的冲击,准确测量“差模”的角速度变化。
但某些陀螺仪在这种情况下会产生非常大错误输出,甚至是产生震荡输出。
“对于飞行器来说,最重要的一点就是安全,无论它的硬件设计还是软件设计,都要首先保证安全,而后才是极致的用户体验。
”
“未来飞行器上的MEMS产品也会向集成化方向发展,比如3轴加速度加上3轴陀螺仪的集成产品,甚至是SOC,把处理器也集成进去,直接提供角度输出供后端处理器调用。
由于飞行器的应用场景一般都是户外,客户势必会做全温范围内的温度补偿,而在出厂前就对MEMS产品做好了全温范围内的温补,或者是设计超级低温漂的传感器,都会是MEMS产品在这一领域的发展方向。
当然可靠性依然是最重要的指标。
”他认为。
随着无人机的功能不断增加,GPS传感器、红外传感器、气压传感器、超声波传感器越来越多地被用到无人机上。
方案商已经在利用红外和超声波传感器来开发出可自动避撞的无人机,以满足将来相关法规的要求。
集成了GPS传感器的
无人机则可以实现一键返航功能,防止无人机飞行丢失。
而内置了GPS功能的无人机,可以在软件中设置接近机场或航空限制的敏感地点,不让飞机起飞。