基于飞思卡尔单片机自动循迹小车控制的设计
- 格式:doc
- 大小:1.28 MB
- 文档页数:35
摘要随着我国的电子科技的不断发展,我们生活中的自动化设备越来越多,也为嵌入式在智能化上的研究提供了一个广阔的平台。
本系统以MK60DN512VMD100微控制器为核心控制单元,选用OV7620 CMOS 模拟摄像头检测赛道信息,高速AD转换芯片选用TCL5510,将提取后的灰度图像进行软件二值化,进而提取赛道信息;用光电编码器实时检测小车的实时速度,采用PID控制算法调节电机的速度以及舵机转向,从而实现速度和方向的闭环控制。
关键字:MK60DN512VMD100,OV7620 CMOS,软件二值化,PIDAbstractWith the continuous development of electronic technology, more and more automation equipment into the production life of the people, the rapid development of embedded intelligent study provides a broader platform.In this paper, the design of intelligent vehicle system MK60DN512VMD100 microcontroller as the core control unit, the selection of OV7620 CMOSanalog cameras to detect the track information, to using TCL5510 high-speed AD converter chip, software binarization image, extract the white guide line for identification of the track information; optical encoder to detect the real-time speed of the model car, using the PID control algorithm to adjust the speed of the drive motor and steering the angle of the steering gear, in order to achieve closed-loop control of velocity and direction of the model car. Keywords: MK60DN512VMD100,OV7620 CMOS,software binarization, PID目录摘要 (I)Abstract .................................................................................................................................. I I 1前言 (1)1.1 设计的背景以及意义 (1)1.2 智能小车国内外概况 (1)1.2.1国内研究的概况 (1)1.2.2 国外研究概况 (2)1.3智能小车的发展前景 (2)2 飞思卡尔单片机自动循迹小车系统设计总方案 (3)2.1 系统硬件部分 (3)2.2 系统软件部分 (4)3 智能车硬件系统 (5)3.1 单片机最小系统 (5)3.1.1 PIT定时器模块 (6)3.1.2 PWM 模块 (6)3.1.3 I/O模块 (7)3.1.4 时钟电路 (7)3.1.5 复位电路 (7)3.1.6 JTAG接口电路 (8)3.2 电机驱动模块 (8)3.3路径识别摄像头检测模块 (9)3.3.1 摄像头的选择 (9)3.3.2 摄像头简介 (10)3.4 速度检测模块 (10)3.5 舵机模块 (10)3.6电源管理模块 (10)3.6.1 3.3V电源 (11)3.6.2 5V电源 (11)4 软件系统的设计与实现 (12)4.1赛道信息的提取 (12)4.2 PID算法介绍 (12)4.2.1 位置式PID (13)4.2.2 增量式PID (14)4.2.3 PID 参数整定 (14)4.3转向舵机的控制方法 (15)4.3.1 舵机的工作原理 (15)4.3.2 舵机的PID 控制 (15)5 开发平台介绍 (19)5.1 IAR Embedded Workbench IDE简介 (19)5.2 IAR Embedded Workbench的功能及特点 (19)5.3 硬件开发平台Altium Designer (22)6结论 (23)参考文献 (24)致谢 .................................................................................................... 错误!未定义书签。
安徽建筑工业学院毕业设计(论文)专业:通信工程班级:08通信2班学生姓名:谢春林学号:课题:基于飞思卡尔单片机的智能小车设计与应用主控制板硬件设计指导教师:夏巍2012 年 6 月1日摘要本文的主要内容是利用飞思卡尔公司的32位单片机Kinetis10,设计能在特定跑道上循迹行驶的智能小车。
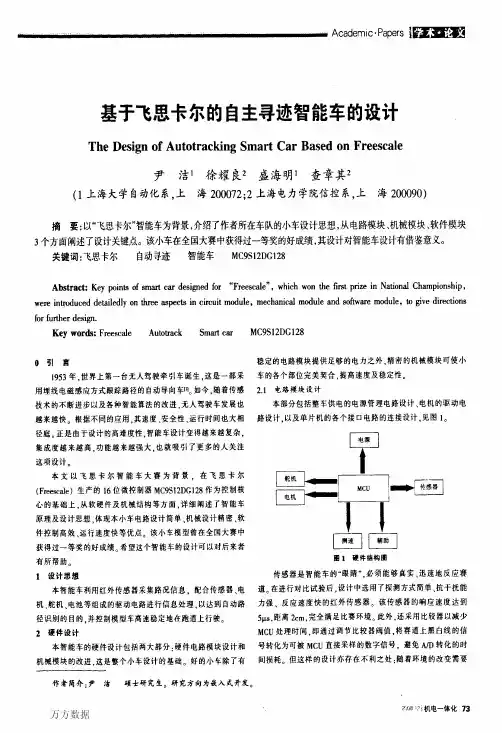
智能车系统以Kinetis10为核心,用它来进行信号采集、数据传输与运算等动作,并产生PWM波控制舵机和电机。
整个系统由单片机模块、路径识别模块、速度检测模块、舵机模块、直流电机驱动模块、电源模块等组成。
智能小车的硬件设计包括:双向控制的电机驱动,可同时对多模块供电的电源系统,3.3V PWM波形驱动舵机电路,与上位机通信的RS232通信模块等。
关键字:智能小车,Kinetis10,电源系统,双向控制。
AbstractThe main content of this paper is to use the 32-bit SCM freescale company Kinetis10, in particular the runway design can trace the car driving on intelligence. Intelligent car system to Kinetis10 as the core, and use it to signal acquisition, data transmission and computing such action and create PWM wave to control the steering gear and motor. The whole system of microcomputer module, path recognition module, speed detection module, steering gear module, dc motor driver module, power supply module.Intelligent car of hardware design including: two-way control motor drive, but at the same time for more power supply module of the power supply system, 3.3 V PWM waves of steering gear drive circuit, and the upper machine RS232 communication module of communication, etc.Key word: Intelligent vehicles, Kinetis10, Power system, Two-way control.目录1 绪论 (1)1.1选题意义 (1)1.2 国内外概况 (1)1.2.1国外概况 (1)1.2.2 国内概况 (2)1.3智能车的发展前景 (3)2 系统设计与方案论证 (3)2.1 系统设计要求 (3)2.2 系统设计方案 (3)2.2.1 主控芯片的选定 (4)2.2.2 传感器模块 (4)2.2.3 测速传感器模块 (5)2.2.4 转向舵机模块 (5)2.2.5电机驱动模块 (5)3 主控芯片简介 (6)3.1 Kinetis K10简介 (6)3.2 所用模块简介 (6)3.2.1 PWM 模块 (7)3.2.2 PIT模块 (7)3.2.3 I/O模块 (7)3.2.4 SCI模块 (7)4 智能车机械设计与安装 (7)4.1 舵机的安装 (8)4.2 前轮倾角的调整 (8)4.3 后轮差动轮的调整 (9)4.4 速度检测模块安装 (9)4.5 传感器的安装 (9)5 主板电路设计 (9)5.1 主控芯片电路 (9)5.2 外围电路 (11)5.2.1 电源管理模块 (11)5.2.3 速度检测电路 (15)5.2.4 舵机驱动电路 (16)5.2.5拨码开关电路 (17)5.2.5 RS232通信模块 (17)6 软件设计 (18)6.1 开发工具 (18)6.2 软件流程图 (18)7 总结 (20)8 致谢 (21)参考文献 (22)附录: (23)基于飞思卡尔单片机的智能小车设计————主控制电路设计电子与信息工程学院通信工程 2008级2班谢春林指导教师夏巍1 绪论1.1选题意义智能车辆( intelligent vehicles, IV)是智能交通系统( in2telligent transportation systems, ITS)的重要构成部分,其研究的主要目的在于降低日趋严重的交通事故发生率,提高现有道路交通的效率,在某种程度上缓解能源消耗和环境污染等问题。
基于飞思卡尔单片机的智能小车设计与应用毕业设计 (论文)专业通信工程班级10级1班学生姓名刘新学号10205040117课题基于飞思卡尔单片机的智能小车设计与应用---主监控程序和行使操纵程序的设计指导教师夏巍2021年6月1日摘要本文要紧是以全国大学生〝飞思卡尔〞杯智能小车竞赛为背景的一项课题研究。
本次课题研究要紧采纳利用飞思卡尔公司的32位单片机MPC5604MINI作为核心操纵单元,用CCD进行对道路信息的采集,用编码器对小车速度进行检测,使用7.2V锂电池进行供电,并用MPC5604MINI产生PWM波操纵电机模块和舵机模块,从而达到操纵小车的速度和转向。
本文要紧介绍主监控程序和行驶操纵程序的编写,确实是编写程序让小车各个部分和谐工作,让小车行驶并能够实现转向。
关键词:智能小车;MPC5604MINI;主控电路;行驶操纵。
AbstractThis article is based on National College "Freescale Cup" smart car competition as a research background.The research mainly uses Freescale's 32-bit singlechip as the core control unit MPC5604MINI,and Carried out on the road with a CCD information collection, and use encoder to detect the speed of the car, using a 7.2V lithium battery-powered and used to generate PWM wave MPC5604MINI module and servo motor control module, so as to control the car's speed and steering.This paper describes the preparation of the master control procedures and driving control program, is to write the program so that the coordination of the various parts of the car, so the car driving and steering can be achieved.Keywords: Smart car;MPC5604MINI;Control circuit;Driving control.目录摘要 (Ⅰ)Abstract (Ⅱ)1引言 01.1课题研究意义 01.2 智能小车国内外概况 01.2.1 国内研究概况 01.2.2 国外研究概况 (2)1.3 智能小车进展前景 (2)2 系统设计及方案论证 (3)2.1 系统设计要求 (3)2.2 系统设计方案 (2)2.2.1 主控芯片的选定 (3)2.2.2 传感器模块 (5)2.2.3 测速传感器模块 (5)2.2.4 转向舵机模块 (6)2.2.5电机驱动模块 (6)2.2.6国内外概况 (6)3系统硬件电路介绍 (8)3.1 主控芯片电路 (8)3.2 速度检测电路 (8)3.3 电机驱动电路 (8)3.4 舵机驱动电路 (9)3.5 拨码开关电路 (9)4 软件设计 (9)4.1软件流程 (10)4.1.1程序流程图 (10)4.1.2 程序流程图介绍 (10)4.2 CodeWarrior介绍 (11)4.2.1 CodeWarrior简介....................... 错误!未定义书签。
基于单片机的智能循迹小车设计智能循迹小车是一种基于单片机控制的小型车辆,通过传感器检测路面信息,结合预设路线实时调整行驶方向,实现自动循迹行驶。
智能循迹小车在无人驾驶、智能物流、探险救援等领域具有广泛的应用前景。
智能循迹小车的硬件主要包括单片机、传感器、电机和电源。
其中,单片机作为整个系统的控制中心,负责接收传感器信号、处理数据并输出控制指令;传感器用于检测路面信息,一般选用红外线传感器或激光雷达;电机选用直流电机或步进电机,为小车提供动力;电源为整个系统提供电能。
智能循迹小车的软件设计主要实现传感器数据采集、数据处理、控制指令输出等功能。
具体来说,软件通过定时器控制单片机不断采集路面信息,结合预设路线信息进行数据分析和处理,并根据分析结果输出控制指令,实现小车的自动循迹。
为提高智能循迹小车的稳定性和精度,需要对算法进行优化。
常用的算法包括PID控制、模糊控制等。
通过对算法的优化,可以实现对路面信息的精确检测,提高小车的循迹精度和稳定性。
为验证智能循迹小车的实际效果,需要进行相关测试。
可以在平坦的路面上进行空载测试,检验小车的稳定性和循迹精度;可以通过加载重量、改变路面条件等方式进行负载测试,以检验小车在不同条件下的性能表现;可以结合实际应用场景进行综合测试,以验证智能循迹小车在实际应用中的效果。
测试环境的选择要具有代表性,能够覆盖实际应用中可能遇到的各种情况。
测试过程中要保持稳定的行驶速度,以获得准确的测试数据。
对于测试过程中出现的问题,要及时记录并分析原因,以便对系统进行改进。
测试完成后,要对测试数据进行整理和分析,评估系统的性能表现,提出改进意见。
通过以上测试,我们发现基于单片机的智能循迹小车在循迹精度、稳定性等方面表现良好,能够满足实际应用中的需求。
同时,通过对算法的优化和硬件的改进,可以进一步提高小车的性能表现。
本文介绍了基于单片机的智能循迹小车的设计和实现过程。
通过合理选择硬件和优化软件算法,实现了小车的自动循迹功能。
自动循迹智能小车制作目录摘要................................................................. 错误!未定义书签。
1 设计要求 (3)2 方案的选择与比较 (3)2.1 主控芯片选择 (3)2.2 电源的选择 (3)2.3 寻迹方案 (4)2.3 电机驱动方案 (4)3 最终方案 (5)4各功能模块的实现 (6)4.1 微控制器模块的设计 (6)4.2电源模块原理图 (6)4.3 TCRT5000红外检测模块 (6)4.4 系统PCB图 (7)4.5 系统程序流程图 (8)5 性能测试 (9)6 性能评价及总结 (10)7 附录 (11)附录1:元件清单 (11)附录2 系统原理图 (12)附录3系统程序 (13)8参考文献 (19)1 设计要求设计一自动寻迹小车,其实现功能如下:1.使其能够检测到轨迹的路线,并按照预订轨迹运行;2.要求在小车冲出预定路线后能够自动回到预定轨迹上;3.小车能够按多种不同的轨迹运行。
2 方案的选择与比较2.1 主控芯片选择方案1:采用51系列单片机,该系列单片机结构简单,但是能实现很多功能。
与其它单片机相比较价格便宜。
端口电流较大,可以达到20mA,驱动能力强。
方案2:采用msp430系列单片机,该系列单片机片上资源丰富,功能强大,但是端口灌电流和拉电流较小,驱动能力不强。
它主要运用在需要低功耗的地方。
本系统主要是进行寻迹运行的检测以及电机的控制,经过对比分析,我们选用AT89S52单片机作为主控芯片来驱动电机,进而控制电机转速。
2.2 电源的选择方案1:采用9V蓄电池为直流电机供电,将9V电压降压、稳压后给单片机系统和其他芯片供电。
蓄电池具有较强的电流驱动能力以及稳定的电压输出性能。
虽然蓄电池的体积过于庞大,在小型电动车上使用极为不方便。
方案2:采用9V南孚干电池直接个电机驱动芯片L298N供电,并将9V经过7805稳压及电容滤波后给单片机供电。
基于单片机循迹小车的设计
一、硬件结构设计
(1)外观设计
该循迹小车采用4轮驱动底盘,使小车有较强的稳定性,小车安装有
一个带调光功能的LED头灯,可以缩短小车行驶的距离,以及一个用于采
集道路信息的循迹模块。
四个车轮上安装有电机,以及一个用于驱动小车
的电源,主控器采用的是51单片机。
(2)基础硬件设计
1)电源:采用12V锂电池,通过一个5V调整稳压电路改变输出电压,并调整电流大小以供电源的可靠性;
2)车轮电机:采用马达,可提供足够的动力,能够拉动小车行驶,
同时通过电路来控制马达的速度;
3)主控器:采用51单片机,作为小车的主控单元,可实现小车的运
动控制、数据采集等功能;
4)循迹模块:采用模拟循迹模块,用于采集道路信息,根据采集的
信息以及灰度传感器的反馈信息,调整小车的运动方向;
5)头灯:采用LED头灯,可实现可调光的功能,使得车子在夜晚的
黑暗环境中也能保持安全的运行;
6)电路板:依据小车的硬件结构设计出合理的路径,实现电路图和
实际的车路径的一一匹配,以此实现对小车运行的控制。
二、软件程序设计
(1)程序流程设计。
沈阳理工大学课程名称:基于单片机智能循迹小车姓名:魏玉柱指导教师:程磊催宁海摘要本文论述了基于单片机的智能循迹小车的控制过程。
智能循迹是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。
智能循迹小车是一个运用传感器、单片机、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现循迹导航的高新科技。
该技术已经应用于无人驾驶机动车,无人工厂,仓库,服务机器人等多种领域。
本设计采用STC89C52单片机作为小车的控制核心;采用TCRT5000红外反射式开关传感器作为小车的循迹模块来识别白色路面中央的黑色引导线,采集信号并将信号转换为能被单片机识别的数字信号;采用驱动芯片L298N构成双H桥控制直流电机,其中软件系统采用C程序,本设计的电路结构简单,容易实现,可靠性高。
关键词:STC89C52 智能循迹小车TCRT5000传感器电机驱动目录1引言 (4)2 需求分析 (4)2.2 循迹小车的发展历程回顾 (5)2.3智能循迹小车的应用 (5)2.4 智能循迹小车研究中的关键技术 (8)3系统设计 (9)4详细设计 (8)4.1 硬件设计 (8)4.1.1电路原理图 (9)4.1.2 器件选择 (10)4.1.2.1 智能循迹小车的主控芯片的选择 (10)4.1.2.2 智能循迹小车电源模块的选择 (10)4.1.2.3 智能循迹小车电机驱动电路的选择 (11)4.1.2.4 智能小车循迹模块的选择 (11)4.1.3 模块设计 (12)4.1.3.1电机驱动模块电路 (12)4.1.3.2光电传感器模块 (12)4.2 软件设计 (14)4.2.1程序流程图 (14)4.2.2实现主要代码 (14)5 实验结果 (16)5.1设计实现 (16)5.2出现的问题和解决的方法 (17)6 结束语 (18)7.参考文献 (19)1引言随着控制技术及计算机技术的发展,寻迹小车系统将在未来工业生产和日常生活中扮演重要的角色。
基于单片机的智能循迹避障小车设计目录基于单片机的智能循迹避障小车 (1)摘要 (1)Abstract (2)1绪论 (3)1.1研究背景 (3)1.2研究现状 (4)1.3研究目的 (4)1.4研究内容 (4)2系统总体方案及各模块设计 (5)2.1总体方案设计 (5)2.2各模块方案论证 (6)2.2.1供电模块的设计 (6)2.2.2循迹部分设计 (6)2.2.3速度检测模块设计 (7)2.2.4避障模块设计 (8)2.2.5驱动电机选择 (9)2.2.6电机驱动器件 (9)2.2.7核心控制器 (10)3硬件设计 (11)3.1单片机控制电路 (11)3.2电机驱动电路 (13)3.3速度检测模块电路 (14)3.4PWM调速原理 (15)3.5循迹检测电路 (15)3.6障碍物检测电路 (17)3.7液晶显示电路 (18)4软件设计 (19)4.1系统控制流程图 (19)4.2驱动单元的实现 (20)4.2.1循迹算法设计 (20)4.2.2避障驱动设计 (21)4.2.3速度检测及控制设计 (21)4.3路径规划设计 (23)4.4小车位置设计 (24)5调试 (26)6结论 (28)参考文献 (29)致谢 (30)附录 ···············································································错误!未定义书签。
摘要本循迹小车采用现在较为流行的8位单片机作为系统大脑,以STC89C52单片机为控制核心。
用其控制行进中的小车,以实现其既定的性能指标。
充分分析我们的系统,其关键在于实现小车的自动控制,而在这一点上,单片机就显现出来它的优势控制简单、方便、快捷。
40脚的DIP封装使它拥有32个完全IO(GPIO-通用输入输出)端口,通过这些端口加以信号输入电路,将各传感器的信号传至单片机分析处理,从而控制L293D电机驱动,控制小车。
利用红外对管检测黑线,通过循迹模块里的红外对管是否寻到黑线产生的电平信号返回到单片机红外对管来实现循迹功能。
单片机根据程序设计的要求做出相应的判断送给电机驱动模块。
让小车来实现前进,左转,右转,停车等基本功能。
集成红外线传感器即光电开关进行避障。
整个系统的电路结构简单,可靠性能高。
根据小车各部分功能,分析硬件电路,并调试电路。
将调试成功的各个模块逐个地融合成整体,再进行软件编程调试,直至完成。
关键词:循迹小车STC89C52单片机红外对管 L293D电机驱动AbstractThis tracking car adopts the now popular 8-bit single chip microcomputer as the system of the brain, with the STC89C52 single-chip microcomputer as the core. To control the traveling car with it, in order to realize the given performance index. Full analysis of our system, the key is to achieve the automatic control cars, but at this point, single-chip microcomputer control will show its advantage is simple, convenient and fast. 40 feet DIP package makes it has 32 completely IO (GPIO - general input/output port, signal input circuit, through these ports will transmit the signals to single chip microcomputer analysis of each sensor to control L293D motor drive and control the car. The use of infrared for detecting tube black line, through infrared tracking module for tube whether find level signal produced by the black thread returns to the SCM infrared tube to realize tracking function. SCM according to the requirement of the program design make the corresponding judgment for motor driver module. Let the car to achieve forward, turn left, turn right, the basic function such as parking. Integrated infrared sensor photoelectric switch for obstacle avoidance. The circuit of the whole system structure is simple, reliable performance is high. According to the function of car parts, analyze the hardware circuit, and debug the circuit. Debugging success of each module individually merged into a whole, and then software programming and debugging, until completion.KEY WORDS: STC89C52 dc motor infrared sensors the pipe tracing cars L293D motor drive目录第一章绪论 (1)第二章方案设计与论证 (2)第一节主控系统 (2)第二节电机驱动模块 (3)第三节循迹模块 (5)第四节避障模块 (6)第五节机械系统和电源模块 (6)第六节电源模块 (6)第三章硬件设计 (8)第一节总体设计 (8)第二节信号检测模块 (11)第四章软件设计 (13)第一节小车运行主程序流程图 (13)第二节电机驱动程序 (14)第三节循迹模块 (15)第五章制作安装与调试 (18)结论 (19)致谢 (20)参考文献 (21)第一章绪论自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。
设计制作数码世界 P .101想让灯光技术更好的服务于现代舞台,就需要详细了解现场的空间高度、宽度等数据,以及舞台的空间平面等,并掌握好设备情况,譬如:舞台用电的总负荷数、吊杆的排列顺序、编号、位置等,以及剧本中主角关系、矛盾内容、主题环境等。
灯光技术人员才能找出适合的方法和灯光艺术表现手段等烘托主题,并结合作品时间与舞台空间的转换,配置好相应的灯光设备和配件,达到适合现代舞台剧情的效果氛围。
此外,为了满足现代舞台表演市场,并且让现场情境更加丰满,就需要灯光师有一定的计算机水平。
在考虑剧本观念和舞台实际情况后,还要结合色彩和光学效应等特性,并以计算机编程管控为展示载体,让现代舞台表演变得更加精彩。
3.运用舞台灯光技术时需要具备的素养因为一个舞台灯光设计人员的技术,会在很大程度上决定灯光的作用,并对表演具有直接性影响。
所以运用舞台灯光技术时,工作人员除了会了解灯光、善用灯光技术外,还要需要具备以下2点素养:首先要有团队协作精神:部分决定整体,好的作品是由所有参与者共同创作完成的,这需要各个部门之间团结协作才能达到效果。
所以舞台灯光设计人员要配合其它部门发挥灯光作用,让观众更好的理解舞台剧情;其次与导演沟通到位:恰到好处的灯光投景对作品表达有很大作用,所以灯光技术人员要及时与导演沟通探讨,并结合导演思路,进一步修改更正灯光效果。
还可以在原定剧本的镜框下,大胆尝试新手法,让舞台内容变得更充实。
结语现代舞台灯光技术是表演中不可或缺的内容,同时也是一门儿从舞美艺术中剥离出来的新兴艺术。
舞台赋予了灯光艺术生命,而灯光技术的好坏优劣,则决定了舞台内容的精彩程度。
所以笔者坚信,随着时代的进一步发展,舞台灯光技术的不断更新完善,以及灯光技术师的文化修养的进一步提升,舞台灯光的表演效果将会更加真实与生动。
参考文献[1]伊天夫.“创造自由的照明空间”的理念与探索——金长烈教授戏剧舞台灯光理论研究[J].戏剧艺术.2018(03):107-112.[2]李彦飞.浅谈舞台灯光在高校艺术活动中的应用[J].当代教育实践与教学研究.2018(08):232-233.[3]周建华.舞台灯光设计中的光与色运用[J].艺术科技.2015(02):70.作者简介毕鹏程,1974.7,男,山东日照人,舞台技师,专科,主要从事舞台技术,日照市石臼影剧院。
智能小车设计摘要:智能车技术以汽车电子为背景,涵盖了控制、模式识别、传感、电子、电气、计算机和机械等多个学科,这对进一步提高学生的综合素质,培养创新意识,培养学生从事科学、技术研究能力有着重要意义。
智能小车系统以飞思卡尔16位单片机作为系统处理器,采用基于光电传感器的信号采样模块获取赛道黑线信息,通过算法控制策略和PWM控制技术对智能小车的转向和速度进行控制。
使小车能够自主识别黑色引导线并根据黑色引导线实现快速稳定的寻线行驶。
系统介绍了硬件和软件两个方面。
在硬件方面,设计了具有电源管理、路径识别、车速检测、舵机控制和直流驱动电机控制的相关电路;在软件方面,根据PID控制或模糊控制并使用CodeWarrior软件编程和BDM调试实现小车行驶控制。
关键词:智能车;单片机;光电传感器;路径识别;1. 前言飞思卡尔智能车具体包括一种基于光电传感器的智能寻迹小车的设计和实现。
智能小车硬件系统由XS12微控制器、电源管理模块、路径识别电路、车速检测模块、舵机控制单元和直流驱动电机控制单元组成。
本系统以飞思卡尔16位微处理器MC9S12XS128为控制核心,并采用CodeWarrior软件编程和BDM作为调试工具。
运用红外发射接收原理进行道路信息采集,经单片机AD转换后通过相关算法及控制策略和PWM控制技术对智能小车的转向和速度进行控制,使小车能够自主识别黑色引导线并根据黑色引导线实现快速稳定的寻线行驶。
2.小车机械结构调整与优化车身机构调整包括:底盘调整、前轮的调整、后轮距及后轮差速的调整、齿轮传动机构调整。
3.硬件设计方案3.1电源模块设计由于电路中的不同电路模块所需要的工作电压和电流容量不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。
常用的电源有串联型线性稳压电源和开关型稳压电源两大类。
前者具有纹波小、电路结构简单的优点,但是效率较低,功耗大;后者功耗小,效率高,但电路却比较复杂,电路的纹波大。
基于单片机控制的循迹小车设计循迹小车是一种基于单片机控制的智能机器人,能够根据预设的轨迹路径进行移动。
它通过搭载在车身上的传感器感知地面颜色变化,从而实现自主循迹行驶。
循迹小车在教育、娱乐、科研等领域都有广泛的应用。
循迹小车的设计主要分为硬件设计和软件设计两个部分。
硬件设计方面,循迹小车需要搭载一台单片机作为控制核心。
常用的单片机有STC89C52、51、PIC16F877A等,我选用了51系列的单片机作为控制核心。
此外,还需要一个电机驱动模块,用于控制小车的左右轮电机。
电机驱动模块可以选择L298N等型号。
同时,为了感知地面的颜色变化,循迹小车还需要搭载红外线传感器模块或光敏传感器模块。
这些硬件模块需要通过引脚进行连接,并使用杜邦线将它们与单片机相连。
软件设计方面,循迹小车需要编写相应的程序代码。
首先,需要进行传感器模块的初始化,设置相应的引脚模式。
然后,通过一定的算法来判断传感器模块所感知到的颜色变化。
根据传感器模块的返回值,可以判断当前小车所处位置以及前进方向。
根据不同的情况,可以通过电机驱动模块控制小车的左右轮电机,从而实现小车的前进、后退、左转、右转等动作。
在循迹小车的设计中,还可以加入一些其他的功能模块。
例如,可以在小车上加入超声波传感器模块,用于感知前方的障碍物并进行避障。
还可以加入蓝牙模块,实现与手机或其他设备之间的通信。
通过蓝牙模块,可以通过手机APP控制小车的移动方向和速度,实现远程遥控功能。
循迹小车的设计不仅提高了学生对电子技术的理解和应用能力,同时也带来了乐趣和创新的空间。
学生可以在基础的循迹小车基础上,不断进行创新和改进。
例如,可以通过加入陀螺仪模块,实现小车的平衡能力,从而实现自动倒车等更复杂的动作。
还可以加入颜色传感器模块,实现对不同颜色的识别,从而实现按颜色循迹的功能。
总之,基于单片机控制的循迹小车设计是一项具有教育意义和实用价值的项目。
通过这个项目,学生可以锻炼自己的动手能力和创新思维,同时也可以提高对电子技术的理解和运用能力。
单片机课程设计报告书课题名称基于单片机的自动循迹智能小车的设计姓名谭志平学号081250133院系物理与电信工程系专业电子科学与技术指导教师肖卫初副教授2011年 6月10日一、设计任务及要求:本课程设计以ATmega16为核心,用L298N驱动两个减速电机,当产生信号驱动小车前进时,是通过循迹模块里的红外对管是否寻到黑线产生的电平信号通过LM324再返回到单片机,单片机根据程序设计的要求做出相应的判断送给电机驱动模块,让小车来实现前进、左转、右转、停车等基本功能。
本设计要求设计的模块主要有:单片机最小系统模块、传感器循迹模块、L298驱动直流电机模块、LCD12864液晶显示模块、电源模块等。
指导教师签名:2011年04月22日二、指导教师评语:指导教师签名:2011年6月16日三、成绩验收盖章2011年6 月16日基于单片机的自动循迹智能小车的设计谭志平(湖南城市学院物理与电信工程系电子科学与技术专业,益阳,413000)1设计目的本课程设计的主要目的是设计一智能循迹小车,通过设计把所学的知识运用到实践中,通过本次设计更好的掌握单片机的控制原理以及传感器的知识。
真正的做到学以致用。
2设计的主要内容和要求当前的电动小汽车基本上采取的是基于纯硬件电路的一种开环控制方法,或者是直线行使,或者是在遥控下作出前进、后退、转弯、停车等基本功能。
但是它们不能实现在某些特殊的场合下,我们需要能够自动控制的小型设备先采集到一些有用的信息的功能。
本设计正是在这种需要之下设计的一种智能的电动小车的自动控制系统。
它是以单片机ATmega16为控制核心,附以外围电路,在画有黑线的白纸“路面”上行使,由于黑线和白线对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”——黑线。
判断信号可通过单片机控制驱动模块修正前进方向,以使其保持沿着黑线行进。
轨迹探测模块用5只光电开关。
通过检测5只光电开关的电平状态,来判断小车的运行状况,当小车有偏转时,做出相应的转向调整,直到中间的光电开关重新检测到黑线(即回到轨道)再恢复正向行驶等智能控制系统。
摘要随着我国的电子科技的不断发展,我们生活中的自动化设备越来越多,也为嵌入式在智能化上的研究提供了一个广阔的平台。
本系统以MK60DN512VMD100微控制器为核心控制单元,选用OV7620 CMOS 模拟摄像头检测赛道信息,高速AD转换芯片选用TCL5510,将提取后的灰度图像进行软件二值化,进而提取赛道信息;用光电编码器实时检测小车的实时速度,采用PID控制算法调节电机的速度以及舵机转向,从而实现速度和方向的闭环控制。
关键字:MK60DN512VMD100,OV7620 CMOS,软件二值化,PIDAbstractWith the continuous development of electronic technology, more and more automation equipment into the production life of the people, the rapid development of embedded intelligent study provides a broader platform.In this paper, the design of intelligent vehicle system MK60DN512VMD100 microcontroller as the core control unit, the selection of OV7620 CMOSanalog cameras to detect the track information, to using TCL5510 high-speed AD converter chip, software binarization image, extract the white guide line for identification of the track information; optical encoder to detect the real-time speed of the model car, using the PID control algorithm to adjust the speed of the drive motor and steering the angle of the steering gear, in order to achieve closed-loop control of velocity and direction of the model car. Keywords: MK60DN512VMD100,OV7620 CMOS,software binarization, PID目录摘要 (I)Abstract .................................................................................................................................. I I 1前言 (1)1.1 设计的背景以及意义 (1)1.2 智能小车国内外概况 (1)1.2.1国内研究的概况 (1)1.2.2 国外研究概况 (2)1.3智能小车的发展前景 (2)2 飞思卡尔单片机自动循迹小车系统设计总方案 (3)2.1 系统硬件部分 (3)2.2 系统软件部分 (4)3 智能车硬件系统 (5)3.1 单片机最小系统 (5)3.1.1 PIT定时器模块 (6)3.1.2 PWM 模块 (6)3.1.3 I/O模块 (7)3.1.4 时钟电路 (7)3.1.5 复位电路 (7)3.1.6 JTAG接口电路 (8)3.2 电机驱动模块 (8)3.3路径识别摄像头检测模块 (9)3.3.1 摄像头的选择 (9)3.3.2 摄像头简介 (10)3.4 速度检测模块 (10)3.5 舵机模块 (10)3.6电源管理模块 (10)3.6.1 3.3V电源 (11)3.6.2 5V电源 (11)4 软件系统的设计与实现 (12)4.1赛道信息的提取 (12)4.2 PID算法介绍 (12)4.2.1 位置式PID (13)4.2.2 增量式PID (14)4.2.3 PID 参数整定 (14)4.3转向舵机的控制方法 (15)4.3.1 舵机的工作原理 (15)4.3.2 舵机的PID 控制 (15)5 开发平台介绍 (19)5.1 IAR Embedded Workbench IDE简介 (19)5.2 IAR Embedded Workbench的功能及特点 (19)5.3 硬件开发平台Altium Designer (22)6结论 (23)参考文献 (24)致谢 .................................................................................................... 错误!未定义书签。
附录1电路原理图 . (26)附录2 PCB图 (27)附录3 元件清单 (28)附录5 部分程序源代码 (29)1前言1.1 设计的背景以及意义在现代社会,汽车逐渐走进每个平民的家庭生活中,汽车行业发展迅速,同时交通事故也大大增多,每一分钟都有人死于车祸。
近几年智能系统的发展迅速,智能车的研究成为了当下的研究热点。
智能汽车研究涉及了很多领域,最直接的表现是要实现汽车的自动驾驶。
要实现自动驾驶就离不开智能化系统的设计,同时要求智能车能感知周围的环境。
一旦智能车投入使用,就会降低当前社会交通事故的发生率,同时能够大大提高现有交通道路的使用效率,并且能在一定程度上缓解能源危机的到来,降低广大人民的劳动强度,给人们一个更好的未来。
1.2 智能小车国内外概况1.2.1国内研究的概况我国在智能车的研究中投入了大量的资金和精力,为了能够培养出自己的研究骨干,在教育部的牵头下,我国组织了智能小车的高校比赛,以此来培养最基本的研究人才,这也符合我国的人才强国战略。
这项比赛用的是飞思卡尔公司产的芯片,第一届比赛在清华大学举办,得到了各大高校的积极响应,取得了良好的效果。
该项比赛,韩国有丰富的经验,他们已举办多届此类比赛。
因为此项比赛涉及到了很多专业知识,尤其是必须要掌握自动控制、电子、计算机等多个领域的知识,所以能够提高大学生的知识水平。
另外,比赛还可以提高学生的动手能力,弥补现在教育的弊端。
前两届比赛中组委会统一规定了赛车的模型,微型控制器选用当时最流行的16位微型控制器MC9S12DG128,该控制器为飞思卡尔公司生产,性能优良,功能可靠。
现在比赛最常用的是32位的Kinetis系列,主要包括Kinetis E,EA,M,L 等系列、32位的MPC56xx系列、32位的Kinetis(ARM® CortexTM-M4),主要包括Kinetis W,K等系列、16位的9S12系列、32位的DSC系列、ColdFire系列和8位的单片机系列(可使用两片)。
飞思卡尔赛车比赛规定各队在符合条件规定的情况下,赛车跑完全程时间最短者获胜,我国在2007年的比赛中首次打败了韩国队,终止了其七连冠的记录。
我国已经成功的举办了10次该项比赛,参加比赛的学校大概已经有300所,它们来自全国各地,分布在30个省市、自治区。
飞思卡尔比赛在我国已经办了多年,参赛队伍逐年增加,技术也相当成熟,学生们发挥自己的想象力,在原有技术上进行了大胆创新,取得了不错的效果。
现在一些早期的学生已经投入到实际的智能汽车的研究之中。
1.2.2 国外研究概况在飞思卡尔半导体公司的资助下,韩国在全球第一次举办了全国性质的高校智能小车比赛,并且取得了非常好的效果。
第一届比赛要求参赛队选用大赛方指定的HCS12单片机、车模以及电动机。
大赛规定,跑完全程用时最短的队伍获胜。
参赛队伍需要自己学习并且应用嵌入式软件开发工具Codewarrior和在线开发发技术,自主开发识别最佳的行进路线,自行设计电机的驱动电路、检测电路、舵机电路,以及相应的程序编写。
此项比赛举办以来,已经得到了广大企业的认可,他们认为这项比赛提高了学生们的创新能力。
这也是参赛队员在设计小车时不断积累经验,不断推陈出新,敢于创新的得结果。
韩国于2000年举办了第一届该类比赛的,由汉阳大学承办。
在韩国每年的参赛队达到100多支,很多学校都会派出自己的队伍。
韩国的企业也非常重视这项比赛,每年企业都会拿出非常丰厚的奖品,比如特等奖就奖给队员一辆现代汽车。
甚至获奖选手可以有机会到德国宝马的总部研究学习。
这些奖励不仅体现了企业对人才的重视,而且促进了学生的积极性。
如今的比赛不仅仅限于一国之内,高校的参赛队伍已经走出了国门,形成国际比赛机制。
2013年举办的国际赛当中,中国队以绝对的优势击败了美国队、日本队、巴西队、印度队、中国台湾队、墨西哥队、马来西亚队以及捷克与斯洛伐克队。
国际赛的举办增进了各国的技术交流,对智能车的比赛以及技术的创新起到了积极的作用。
1.3智能小车的发展前景在智能车的研发方面,我国与欧洲、美国、日本等国家还有一些差距。
智能车的开发需要很多领域的结合,如信息技术、计算机技术、电子技术等多个领域[1],在这些领域我国也有了很高的发展。
面对这个集汽车制造行业、信息与通信产业和交通系统复合的全新领域,我国有能力抢占这个高新技术的制高点,在未来的国际竞争中取得有利位置。
我国必须把握这次机遇,制定好相应的计划、战略方针以及落实到实处的措施,统筹管理,逐渐缩小与发达国家在智能车领域的差距并且超过他们。
2 飞思卡尔单片机自动循迹小车系统设计总方案本设计的核心是基于K60的主控模块,车速由电机驱动模块控制、转向问题由舵机模块来控制、小车速度的检测交由测速传感器模块的检测,预判行进的路线由路径识别模块来决定。
本设计实现的功能是在特定的跑道上小车自动行驶,完成在转弯处减速、在直道上加速行驶。
本系统由两部分组成即硬件部分和软件部分。
2.1 系统硬件部分本毕业设计选用飞思卡尔公司推出的32位K60微控器作为小车的核心控制单元。
路径识别模块采用摄像头检测技术,将采集到的图像信息转化成电平信号送给微控单元K60。
同时速度检测模块收集到的信息同样转换成电平信号送给微控单元K60。
微控单元经过内部的处理,输出PWM信号,控制电机转速以及舵机转向,达到控制速度和自动行驶的目的。
要使智能小车又快又稳的行驶,不仅要控制好舵机的转向还要控制好车速。
这样才能使小车在转弯的时候不会因为速度太快而偏离跑道,因此我们需要检测小车的速度,并且采取闭环的反馈机制。