连续系统的数字仿真.ppt
- 格式:ppt
- 大小:1.10 MB
- 文档页数:50


课程设计面向结构图的连续系统数题目字仿真学院计算机科学与信息工程学院专业自动化班级2010级2班学生姓名小指导教师吴诗贤2013 年12 月20 日面向结构图的连续系统数字仿真姓名:陶园班级:10自动化3班学号:2010133330摘要根据自动控制系统中面向结构图的数字仿真的基本思想,探讨了仿真过程中典型环节的规范性、系统的连接矩阵、仿真求解、程序框图问题,并应用到实际的范例当中,并分析了结果总结了相关特点和相关结论。
自动控制系统常常是由许多环节组成的,要应用数字仿真方法对系统进行分析和研究,首先需要求出总的传递函数,再转化为状态空间表达式的形式,然后对其求解。
当改变系统某一环节的参数时,尤其是要改变小闭环中某一环节的参数时,以上整个过程又需要重新计算,这对研究对象参数变化对整个控制系统的影响是十分不便的,为了克服这些缺点,同时大多数从事自动化工作的科技人员更习惯于用结构图的形式来分析和研究控制系统,为此产生了面向结构图的仿真方法。
该方法只需将各个环节的参数及各环节间的连接方式输入计算机,仿真程序就能自动求出闭环系统的状态空间表达式。
本课程设计主要介绍典型环节参数和连接关系构成闭环系统的状态方程的方法,而动态响应的计算,仍采用四阶龙格-库塔法。
这种方法具有便于研究各个环节参数对系统的影响,并可以得到每个环节的动态响应,以及对多输入输出系统的进行仿真的有点。
关键字:结构图;典型环节;连接矩阵;数字仿真;1、设计任务已知某一系统结构如下图所示,编写matlab程序求a分别为2,4,6,8,10,12时输出量y的动态响应。
图12、需求分析及概要设计2.1 需求分析根据上述设计任务我们可以基本明确在我们课程设计当中应该明确以下几个方面:✓熟悉在数字计算机仿真技术中常用的四阶龙格-库塔算法。
✓明确在面向结构图的连续系统数字仿真,典型环节及其系数矩阵确定。
✓明确各连接矩阵的确定。
✓能够熟练运用MATLAB仿真软件。
实验一 连续系统的数字仿真一、实验目的1. 熟悉Matlab 中m 文件的编写;2. 掌握龙格-库塔法的基本原理。
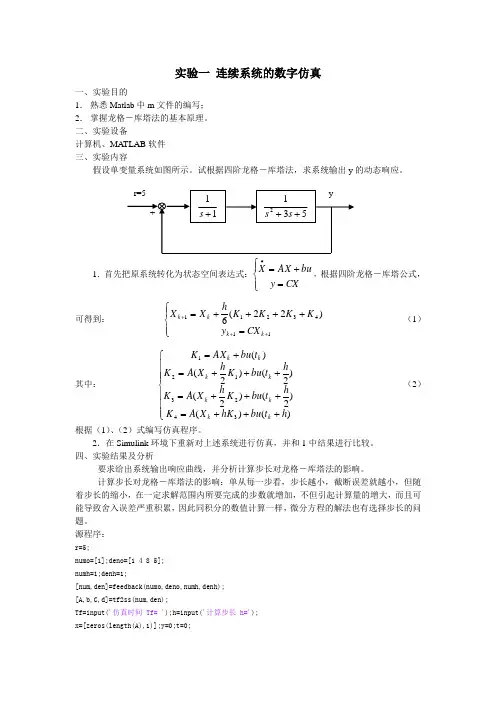
二、实验设备计算机、MATLAB 软件三、实验内容假设单变量系统如图所示。
试根据四阶龙格-库塔法,求系统输出y 的动态响应。
1.首先把原系统转化为状态空间表达式:⎪⎩⎪⎨⎧=+=•CXy bu AX X ,根据四阶龙格-库塔公式,可得到: ⎪⎩⎪⎨⎧=++++=+++1143211)22(6k k k k CX y K K K K h X X (1) 其中: ⎪⎪⎪⎩⎪⎪⎪⎨⎧+++=+++=+++=+=)()()2()2()2()2()(3423121h t bu hK X A K h t bu K h X A K h t bu K h X A K t bu AX K k k k k k k k k (2) 根据(1)、(2)式编写仿真程序。
2.在Simulink 环境下重新对上述系统进行仿真,并和1中结果进行比较。
四、实验结果及分析要求给出系统输出响应曲线,并分析计算步长对龙格-库塔法的影响。
计算步长对龙格-库塔法的影响:单从每一步看,步长越小,截断误差就越小,但随着步长的缩小,在一定求解范围内所要完成的步数就增加,不但引起计算量的增大,而且可能导致舍入误差严重积累,因此同积分的数值计算一样,微分方程的解法也有选择步长的问题。
源程序:r=5;numo=[1];deno=[1 4 8 5];numh=1;denh=1;[num,den]=feedback(numo,deno,numh,denh);[A,b,C,d]=tf2ss(num,den);Tf=input('仿真时间 Tf= ');h=input('计算步长 h=');x=[zeros(length(A),1)];y=0;t=0;for i=1:Tf/h;K2=A*(x+h*K1/2)+b*r;K3=A*(x+h*K2/2)+b*r;K4=A*(x+h*K3)+b*r;x=x+h*(K1+2*K2+2*K3+K4)/6;y=[y;C*x];t=[t;t(i)+h];endplot(t,y)Tf=5 h=0.02五、思考题1.试说明四阶龙格-库塔法与计算步长关系,它与欧拉法有何区别。