雷达--地物回波系统分析
- 格式:doc
- 大小:254.00 KB
- 文档页数:9
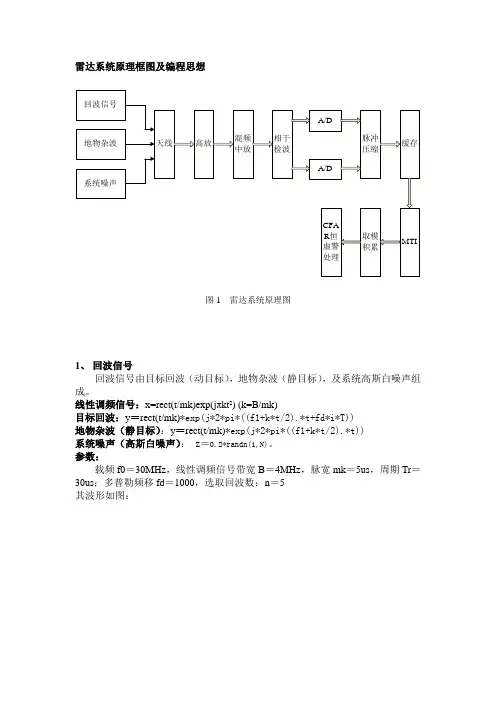
雷达系统原理框图及编程思想图1 雷达系统原理图1、回波信号回波信号由目标回波(动目标),地物杂波(静目标),及系统高斯白噪声组成。
线性调频信号:x=rect(t/mk)exp(jπkt²) (k=B/mk)目标回波:y=rect(t/mk)*exp(j*2*pi*((f1+k*t/2).*t+fd*i*T))地物杂波(静目标):y=rect(t/mk)*exp(j*2*pi*((f1+k*t/2).*t))系统噪声(高斯白噪声):z=0.2*randn(1,N)。
参数:载频f0=30MHz,线性调频信号带宽B=4MHz,脉宽mk=5us,周期Tr=30us;多普勒频移fd=1000,选取回波数:n=5其波形如图:图2 回波2、高放高放采用50阶FIR滤波器,中心频率为30MHz,通带为20MHz。
高放后的波形图:图3 高放后时域频域图形3、混频+中放混频的参考频率为20MHz中放采用50阶FIR滤波器,中心频率为10MHz,通带为4MHz。
图4 混频+中放后时域频域图形4、相干检波参考源的时钟频率f0=10MHz;I 路:I=0.5*X*cos(Φ(t));Q路:Q=0.5*X*sin(Φ(t));原理图:中放之后的信号sin2πf0tcos2πf0t LDFLDFI路Q路波形图:图5 相位检波后I、Q两路时域图5、A/D转换采样频率为5MHz。
x0=(Vmax/2ª)*int{xi*2ª / Vmax };其中,a为AD位数图6 AD采样后后I、Q两路时域图6、脉冲压缩采用发射信号作为匹配滤波。
匹配滤波的脉冲响应:H(k)=X*(k)exp(-j2πkN), k=0,1,2…N线性调频信号:x(n)=rect(n/N)exp(jπkn²) (k=B/tao);图7 脉冲压缩时域图8、MTIMTI采用一次对消:y(n)=x(n)-x(n-1); n=1,2,3…N图8 MTI9、取模+积累对20个回波信号取模并积累,此处是视频相参积累,y(n)= |∑x(n)| n=1,2, 3…N图9 取模加积累10、CFAR(恒虚警检测)恒虚警处理时利用的是前8后8的处理方法。

浅谈地物对气象雷达探测的影响及处理方法气象雷达是一种用于探测大气物理和化学特性的重要工具,可以实现对天气现象的实时监测和预报。
然而,雷达探测的精度受到大气中各种地物的干扰,因此需要对地物的影响进行分析并采取相应的处理方法。
地物对雷达探测的影响主要体现在以下几个方面:1. 反射效应地物表面反射雷达波,形成回波信号,干扰雷达探测。
不同地物的反射系数差异很大,例如水面和陆地的反射系数相差几十倍,这就是为什么雷达探测降水的可行性比探测大陆表面更高的原因。
2. 屏蔽效应地物会挡住探测波,使得雷达的覆盖范围受到限制。
例如,建筑物、山体等高物遮挡的范围就是雷达的盲区。
3. 多次反射干扰地物表面反射的信号还可能被其他地物反射,产生重复信号,干扰雷达探测结果。
这种现象称为多次反射干扰。
面对这些影响,可以采取以下措施:1. 选择合适的工作频段不同频段的雷达波对地物的反射系数有所差异,选择合适的工作频段能够有效减少地物反射对雷达探测的干扰。
2. 采用多波束探测和多角度扫描技术多波束探测和多角度扫描技术能够减少地物遮挡范围,提高雷达探测的覆盖范围。
其中,多波束天气雷达技术是现代天气雷达的重要发展方向,主要是用于降低地物对雷达探测的干扰。
3. 研究地物反射特性通过对地物反射特性的深入研究,有可能找到一些针对性的处理方法,例如通过计算地物的反射系数,恰当地调整雷达的反射系数来抵消地物反射干扰等。
总之,地物对雷达探测的干扰是必然的,但是通过科学合理的处理方法能够有效降低地物干扰对雷达探测的影响,提高雷达探测的精度和可靠性,为天气预报和防灾减灾提供有力技术支持。
衰落速率的计算计算多普勒频率是求衰减落速率〔Fading rate 〕最容易的方法。
为了在一个特定的多普勒频移范围内计算回波信号的幅度,必须将所有具有这些频移的信号相加。
这就需要了解散射面上的多普勒频移等值线〔等值多普勒频移〕。
对于每一种特殊形状的几何体都必须建立起这种多普勒频移等值线。
下面用一个沿地球外表水平运动的简单例子来说明。
它是普通巡航飞行飞机的一个典型实例。
假定飞机沿y 方向飞行,z 代表垂直方向,高度〔固定〕z = h 。
于是有v =1v vh y x z y x 111R -+=式中,1x ,1y ,1z 为单位矢量。
因而 h y x vy R v r 222++==•R v式中,v r 是相对速度。
等相对速度曲线也就是等多普勒频移曲线。
该曲线的方程为0222222=+--h v v v y x rr 这是双曲线方程。
零相对速度的极限曲线是一条垂直于速度矢量的直线。
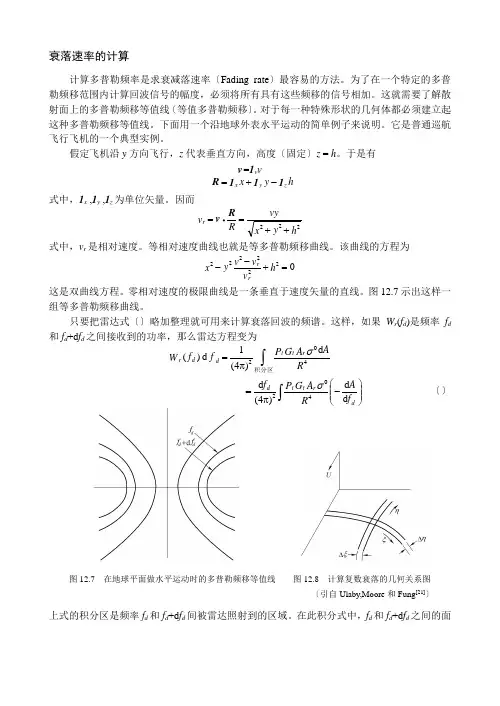
图12.7示出这样一组等多普勒频移曲线。
只要把雷达式〔〕略加整理就可用来计算衰落回波的频谱。
这样,如果W r (f d )是频率f d 和f d +d f d 之间接收到的功率,那么雷达方程变为⎰π=积分区R A A G P f f W r t t d d r 402d )4(1d )(σ ⎰⎪⎪⎭⎫ ⎝⎛-π=d r t t df A R A G P f d d )4(d 402σ 〔〕图12.7 在地球平面做水平运动时的多普勒频移等值线 图12.8 计算复数衰落的几何关系图 〔引自Ulaby,Moore 和Fung [21]〕 上式的积分区是频率f d 和f d +d f d 间被雷达照射到的区域。
在此积分式中,f d 和f d +d f d 之间的面积元用沿着等值多普勒频移曲线的坐标和垂直于等值多普勒频移曲线的坐标来表示。
对每一种特定情况都必须建立这两个坐标。
图12.8示出水平传播的几何形状。
其中,坐标ξ 是等值多普勒频移曲线方向;η 是垂直方向。
浅谈地物对气象雷达探测的影响及处理方法1. 引言1.1 地物对气象雷达探测的影响地物对气象雷达探测的影响是气象雷达探测中不可忽视的因素之一。
在雷达探测过程中,地物会对雷达信号产生反射、遮挡和干扰等影响,进而影响雷达信号的接收和解译。
地物的影响主要表现在以下几个方面:地物反射对雷达探测的影响。
地物反射会导致雷达回波信号的变化和混叠,使得雷达图像中出现虚假回波或者信号叠加现象,从而影响对天气现象的准确探测和分析。
地物会对雷达回波产生遮挡效应。
高大的建筑物、山脉等地物会挡住部分雷达信号,导致雷达信号无法完全传播到目标区域,造成目标区域的天气信息缺失或变形。
地物还会对雷达回波产生干扰效应。
城市中的高楼大厦、高压线等地物会对雷达信号产生多次反射,形成干扰回波,影响雷达数据的准确性和可靠性。
地物对气象雷达探测的影响不可忽视,需要通过合理的处理方法和技术手段来降低其影响,提高雷达数据的质量和准确性。
1.2 地物对气象雷达探测的重要性地物对气象雷达探测的重要性在气象雷达技术中占据着重要的地位。
地物反射是影响雷达探测精度的一个重要因素,通过对地物的反射特性进行分析,可以更好地理解雷达回波的形成机制,提高对天气现象的监测和预测能力。
地物对雷达回波的遮挡效应和干扰效应也是需要重点关注的问题,只有充分了解地物对雷达探测的影响,才能有效地减少误差,提高数据的准确性和可靠性。
加强对地物影响的研究和处理,对于提高气象雷达探测的精度和效率至关重要。
随着技术手段的不断发展和完善,我们可以通过不断改进雷达探测算法、建设更多更密集的雷达站并提高监测覆盖范围,以及提高雷达站网络密度来进一步优化监测能力,实现更精准的气象监测和预测。
【已达到字数要求】2. 正文2.1 地物反射对雷达探测的影响地物反射对雷达探测的影响是气象雷达探测中重要的一环。
地物的特性会影响雷达波的传播和反射,从而对探测结果产生影响。
具体来说,地物的形状和表面特性会导致不同的反射效果,进而影响雷达探测的准确性和可靠性。
---------------------------------------------------------------最新资料推荐------------------------------------------------------1 / 3经典雷达资料-第12章 地 物 回 波第 12 章 地 物 回 波 Richard K. Moore 12.1 雷达地物回波用微分散射截面积或散射系数(单位面积的散射截面积)来描述, 而不用描述离散目 标的总散射截面积。
因为某一地面的总散射截面积是随照射区域而变化的, 而照射区域又取决于雷达的几何参数(脉冲宽度、 波束宽度等)。
的引入就是为了得到一个与这些参数无关的系数。
使用微分散射截面积意味着, 地物回波是由大量相位彼此独立的散射单元产生的。
这主要是由于各散射单元的距离差异所致, 尽管这个差别仅是总距离的很小一部分, 但却是波长的数倍。
并且, 功率的叠加可用于计算平均回波强度。
如果该条件不适用于一些特殊的地面目标, 那么微分散射截面积的概念对这些目标也就失去了意义。
例如, 高分辨力雷达可以分辨出小轿车的各部分, 则就不能正确地描述小轿车的光滑表面。
另一方面, 分辨力较差的雷达看到的是大型停车场上的很多小轿车, 这时测得的停车场的就是有效的。
假定在某一时刻某个雷达照射区域内有 n 个散射单元, 并且也满足上述条件, 因此功率可以相加,其雷达方程则变为式中, Ai为面积元; Pti,Gti,Ari是与 Ai相应的Pt,Gt,Ar值。
在等式右面分子中,括号内的因子是第 i 个单元的散射截面积增量,但此概念只适用于平均值。
于是,平均回波功率由下式给出:ntirGPP4 (式中,用来表示的平均值。
时,得到的形式为照射区(12.1)式中,Pr上面的一横表示平均值。
这种积分实际上并不正确,因为任何实际的独立散射中心都有一个最小尺寸。
然而,这种概念还是被广泛采用,并且只要照射面积大到足以包含许多这样的散射中心,这一概念就是可用的。
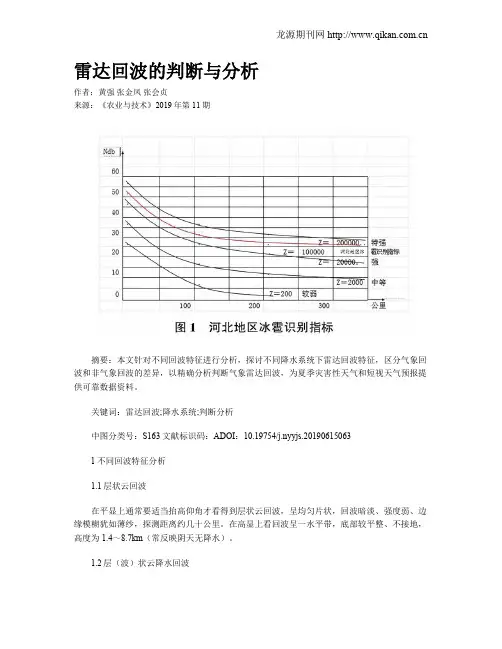
雷达回波的判断与分析作者:黄强张金凤张会贞来源:《农业与技术》2019年第11期摘要:本文针对不同回波特征进行分析,探讨不同降水系统下雷达回波特征,区分气象回波和非气象回波的差异,以精确分析判断气象雷达回波,为夏季灾害性天气和短视天气预报提供可靠数据资料。
关键词:雷达回波;降水系统;判断分析中图分类号:S163文献标识码:ADOI:10.19754/j.nyyjs.201906150631不同回波特征分析1.1层状云回波在平显上通常要适当抬高仰角才看得到层状云回波,呈均匀片状,回波暗淡、强度弱、边缘模糊犹如薄纱,探测距离约几十公里。
在高显上看回波呈一水平带,底部较平整、不接地,高度为1.4~8.7km(常反映阴天无降水)。
1.2层(波)状云降水回波在平显上,层(波)状云降水回波呈均匀片状,强度弱到中等,范围大,内部没有明显块体结构,边缘发毛,破碎模糊。
在高显上回波顶部平坦,且较均匀常看到0℃层300~1000m 的亮带,高度为3.6~8km(常反映大范围稳定性持续降水)。
1.3对流云回波在平显上回波呈小块状,有时零散孤立,有时排列成带状和不规则形状。
高显上常呈柱状、针状,底部不接地,强度为中等,高度为2.2~4.9km(为无降水)。
1.4阵雨回波在平显上回波呈孤立分散的小块单体或回波群,结构较松,边缘不清晰,单体水平尺度在10km以下,强度中等。
高显上回波呈针状顶部发毛,结构松散,回波高度在7~8km以下,回波底部接地(常反映短阵雨)。
1.5雷雨回波在平显上回波块体结识、肥大、紧密、轮廓清晰、边缘多折,单体水平尺度在10km以上,强度特强,很明亮。
在高显上呈柱状,低的仅5~6km,高的可达17~18km(常反映短暂雷雨)。
1.6雹云回波在平显上块体较大,结构紧密,发展急剧、多棱角、突起或小切口,移动迅速,强度特强,回波单块体范围小于10km。
在高显上强度最大值常出现在高于0℃等温线2~3km以上,云顶很高常在12~13km以上.通常呈针状接地的是阵雨回波,不接地的是对流云回波,平显上看单块体回波范围>10km、高显呈柱状,此回波可判定为雷雨回波。
第八章雷达产品实际应用个例分析8.1 1992年4月28日Oklahoma州中西部个例在下午和晚上,在Oklahoma的中部和北部出现了强风暴。
刚过17时30分(局地时间),在Dewey 县的最北端(Oklahoma市西北150km),一个风暴发展成为强风暴。
在风暴内部30000英尺的高度,最大的反射率因子超过50dBZ。
同时,在其入流区之上,存在一个较强的中层悬垂回波,说明有较大的冰雹存在。
基于这些雷达特征,于17时45分发布了Dewey 县将出现一次强雷暴过程的警报。
该警报于28分钟后得到证实,出现了2cm 直径的冰雹。
在接下来的2小时内,基于由WSR-88D观测的三维风暴结构,又发布了Dewey 县下游的风暴警报。
摘自文献1 图11图8-1 位于Comanche县中部的一个非龙卷的旋转风暴相对速度的4幅图显示。
时间为1992年4月28日20点19分。
强风暴的警报没有升级为龙卷警报,基于低层的弱旋转特征。
在风暴的中层,较强的旋转很明显。
当风暴继续向着东南方向的Lawton地区(Comanche县境内),WSR-88D探测到位于风暴中层的弱的旋转。
19点55分,又发布强风暴警报。
一个飞行员于大约20点10分在Lawton 地区的北部观测到漏斗云。
然而,风暴中层相对速度数据(图8-1)继续表明一个宽阔的旋转特征只局限于风暴的中层。
因此,预报员决定不把强风暴警报升级为龙卷警报,主要基于WSR-88D的三维速度和反射率因子数据。
20点20分,高尔夫球大小的冰雹降落在Lawton 地区,证实了强风暴的警报,其提前时间(lead time)为25分钟。
从以上可知,WSR-88D不仅在发布警告方面有较好的准确率,而且在决定不发布警报或不升级警报方面也有相当的技巧。
预报员经常面对是否应发布或升级一个强天气警报。
位于Dodge城的区域预报中心有几次近乎的强天气事件,基于WSR-88D数据,没有发布强天气警报。
浅谈地物对气象雷达探测的影响及处理方法地物对气象雷达探测的影响是不可避免的,因为雷达信号在传播过程中会与地物相互作用,产生散射、衰减和多次反射等现象,从而影响雷达对降水和空气动力学的探测效果。
地物对气象雷达探测的影响主要表现在以下几个方面:1.散射效应:地物表面的粗糙度和形状会引起雷达波的散射,散射的强度和方向会改变雷达回波的强度和方向,进而影响对降水的探测。
建筑物、山脉和森林等地物会引起雷达波的反射和散射,导致回波多次反射,出现干扰回波和伪回波,使得雷达探测到的天气信号不准确。
2.衰减效应:雷达信号在传播过程中会受到地物的吸收和散射而逐渐衰减。
特别是对于强降水和大尺度天气系统,会有较多的雨滴或冰晶,这些水滴和冰晶对雷达信号的衰减效应更加显著,使得雷达回波的强度减小,从而影响雷达对降水的定量探测。
3.阻挡效应:地物可以阻挡雷达波的传播路径,使得雷达无法探测到地物背后的天气情况。
特别是山脉和建筑物等高障碍物,会阻挡雷达波的入射和反射,造成“盲区”,使得雷达无法准确探测到地物背后的雨带、风暴等天气现象。
针对以上地物对气象雷达探测的影响,有一些处理方法可以提高雷达探测的精度和准确性:1.地物补偿算法:通过研究地物的散射特性和反射特性,根据回波的径向速度、回波强度等参数,进行地物补偿算法,减小地物对雷达探测结果的影响,提高降水的定量估计精度。
2.气象雷达多普勒退变校正:因为地物的散射和回波速度存在背向和径向不一致的情况,会导致雷达观测到的风场速度偏差。
通过引入多普勒退变校正算法,可以尽可能消除地物散射的干扰,提高风场观测的准确性。
3.地物去除算法:通过分析地物的特征和回波的形态,对地物回波进行自动或人工去除,以减小地物对雷达回波的干扰,提高雷达对降水的检测精度。
4.天气雷达的布站和遮挡规避:在规划和设计天气雷达布站时,要充分考虑地形和地物的影响,避免雷达信号被地物阻挡或散射干扰。
合理调整雷达的仰角和方位角,使其能够覆盖到目标区域,减小地物对探测的影响。
衰落速率的计算计算多普勒频率是求衰减落速率(Fading rate )最容易的方法。
为了在一个特定的多普勒频移范围内计算回波信号的幅度,必须将所有具有这些频移的信号相加。
这就需要了解散射面上的多普勒频移等值线(等值多普勒频移)。
对于每一种特殊形状的几何体都必须建立起这种多普勒频移等值线。
下面用一个沿地球表面水平运动的简单例子来说明。
它是普通巡航飞行飞机的一个典型实例。
假定飞机沿y 方向飞行,z 代表垂直方向,高度(固定)z = h 。
于是有v =1v vh y x z y x 111R -+=式中,1x ,1y ,1z 为单位矢量。
因而 h y x vy R v r 222++==•R v式中,v r 是相对速度。
等相对速度曲线也就是等多普勒频移曲线。
该曲线的方程为0222222=+--h v v v y x rr 这是双曲线方程。
零相对速度的极限曲线是一条垂直于速度矢量的直线。
图12.7示出这样一组等多普勒频移曲线。
只要把雷达式(12.1)略加整理就可用来计算衰落回波的频谱。
这样,如果W r (f d )是频率f d 和f d +d f d 之间接收到的功率,则雷达方程变为⎰π=积分区R A A G P f f W r t t d d r 402d )4(1d )(σ ⎰⎪⎪⎭⎫ ⎝⎛-π=d r t t df A R A G P f d d )4(d 402σ (12.12)图12.7 在地球平面做水平运动时的多普勒频移等值线 图12.8 计算复数衰落的几何关系图 (引自Ulaby,Moore 和Fung [21]) 上式的积分区是频率f d 和f d +d f d 间被雷达照射到的区域。
在此积分式中,f d 和f d +d f d 之间的面积元用沿着等值多普勒频移曲线的坐标和垂直于等值多普勒频移曲线的坐标来表示。
对每一种特定情况都必须建立这两个坐标。
图12.8示出水平传播的几何形状。
其中,坐标ξ 是等值多普勒频移曲线方向;η 是垂直方向。
若采用这种坐标,则式(12.12)可表示为ξσληd )4(d d 40232⎰⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡π=积分带R G P f f W t d d r (12.13) 式中,积分式中的发射功率P t 只有在照射到地面期间是非零的,其他时间为零。
在脉冲雷达中,只有那些在特定时间内反射雷达回波的地面才被认为接收到有限的发射功率P t ,并且脉冲、天线和最大速度都限制了回波出现的频率范围。
图12.9示出另一个例子。
它是一种窄波束窄脉冲雷达系统在很小的照射区域时的情况。
在这种情况下线性近似不会有很大的误差。
波束宽度为φ0的天线发射一个宽度为τ 的脉冲。
为了简化说明,在此假定将脉冲直接照射水平飞行飞机的前方。
此外,假定一个矩形照射区R φ0×c τ/(sin θ )以使问题简化,并进一步忽略多普勒频移等值曲线的曲率。
因此,可以认为所有最远点上和所有最近点上的多普勒频率都相同,即θλm ax m ax sin 2v f d = θλm in m in sin 2v f d = 于是,多普勒频谱的总宽度为)sin (sin 2m in m ax θθλ-=∆vf d对于窄脉冲和偏离垂直入射的情况,总宽度则为θθλcos 2∆≈∆v f d 若根据脉冲宽度计算,上式变为θθλτsin cos 23h vc f d =∆ (12.14)图12.9 机载搜索雷达多普勒频移计算的几何关系图如果在矩形照射区域内入射角的变化足够小,以至使σ 0基本保持恒定,则多普勒频谱为一个由f min 到f max 构成的矩形。
实际上,天线波束并不是矩形。
这导致了侧视雷达的多普勒频谱和具有非矩形天线方向图(形状是沿径向分布的方向图)的多普勒频谱类似。
因而,若径向方向天线的方向图是G =G (β),式中β 是偏离波束中心的角度,则β 根据多普勒频率f d 可表示为v f d 2/λβ=频谱为 ⎥⎦⎤⎢⎣⎡π=v f G R r P f W d xt d 2)4(2)(23303λσλ式中,r x 是距离方向的水平分辨力。
当然,它可用半功率点波束宽度来近似,结果产生式(12.13)给出的波束宽度。
检波的影响在文献中人们已广泛地讨论过窄带噪声检波的影响。
在这里仅需要说明上述例子中检波后的频谱和考虑每秒钟内独立衰减样本的个数。
图12.10分别示出检波前后的频谱。
如假定按平方律检波,则检波后的频谱是检波前频谱的自卷积。
图中仅示出通过检波器中低通滤波器部分。
矩形的射频频谱变成了三角形的视频频谱。
图12.10 来自均匀小区域频谱的衰落:(a )检波前;(b )检波后这一频谱描述了连续波雷达检波器输出端上的衰落。
对于脉冲雷达而言,它以脉冲重复频率对频谱抽样。
如果脉冲重复频率高到足以使整个频谱再现(脉冲重复频率高于奈奎斯特频率,2△f d ),那么图形就是在给定距离上所接收到脉冲的抽样频谱。
图12.11示出接收到的实际脉冲序列,以及在距离R 1上对这些脉冲进行抽样所得到的序列。
图12.10示出在距离R 1上的抽样包络的频谱(经低通滤波)。
根据式(12.13)可知,在不同距离(或垂直角)上频谱的衰落是不同的。
由于许多实用目的不同,独立的抽样个数是很重要的,这可利用不相关抽样的基本统计学原理确定。
对连续积累图12.11 地面目标在雷达顺序脉冲中的衰落而言,独立抽样的有效数为[55]⎰⎥⎦⎤⎢⎣⎡-=T sf e x x R T x TP N 02d )(12 (12.15) 式中,P e 是包络平均功率;T 是平均积累时间;R sf (t )是检波电压的自协方差函数。
在许多实际应用中,若N 足够大,上式可近似为BT N ≈ (12.16)式中,B 是有效的中频带宽。
短积累时间的影响可参见参考资料56。
当然,由于载体的运动使波束照射到地面上不同区域,则衰落抽样也可能是独立的。
因此,在特定的条件下,独立抽样率或由地面上照射区域的移动决定,或由多普勒效应决定,或者由两者的某种组合决定。
独立抽样的次数决定了运用瑞利分布或其他分布的方式。
因此,如果100个脉冲只给出10个独立的抽样,则这些脉冲积累所得到平均值的方差将远大于100个脉冲都独立时求得的值。
基于多普勒效应的系统,如多普勒导航设备及SAR 系统,是依靠检波前的频谱进行工作的,因为它们是相参的,不能采用一般的检波方法。
动目标表面有时杂波还具有内部运动。
当利用固定雷达观察海面和地面的运动时会出现这种现象。
在陆地上,虽然动物的移动以及机动车辆也会产生相同的效应,但它主要还是由植被的移动所引起的。
若雷达回波是由图12.8所示的反射体集合产生的,则由于各散射体之间的运动,如同雷达的运动一样,雷达回波将发生波动。
因此,如果每个反射体是一棵树,随风起伏的树木波动会使各散射体之间产生相对相移,其结果就是回波衰减。
对于固定雷达而言,除去由折射引起的缓慢衰减外,这是惟一能观察到的衰减。
而对于运动的雷达来说,目标的这种运动改变了雷达和目标之间的相对速度,因此,其频谱不同于固定表面的频谱。
由雷达运动所造成的频谱宽度决定了雷达探测这种目标运动的能力。
12.5 地物回波测量技术专用测试雷达和改装后的一般雷达可用来测量地物回波。
由于地物回波的变化几乎都是由散射作用引起的,因此,常把这些系统称做散射仪。
这种仪器既可以利用连续波信号(经多普勒处理或不经多普勒处理), 也可用脉冲或调频测量技术。
具备测量大范围频率响应的散射仪则被称为频谱仪[57]。
它们可采用方向图从针状波束到扇形波束的各种天线。
连续波和调频连续波系统最简单的散射仪采用固定式连续波雷达。
虽然这种系统不很灵活,但这里仍要较为详细地予以讨论,从而阐明那些也适用于更复杂系统的校正方法。
图12.12是连续波散射仪的方框图。
为估算σ0,需知雷达发射功率与接收功率之比。
图12.12(a)所示的系统分别测量发射机功率和接收机灵敏度。
发射机通过定向耦合器将能量馈送到天线,从而将其中一小部分能量馈送到功率计上。
接收机具有单独的(与发射天线电气隔离)天线。
接收机的输出经检波、平均,并显示在仪表、示波器或其他显示或记录装置上。
接收机灵敏度的检查必须利用校准信号源。
校准信号在发射机关机时送入接收机。
图12.12(b)示出一个类似的装置,在此装置中将发射信号衰减为某一已知量,然后用来检查接收机。
通过比较衰减过的发射信号和接收到的地物回波信号,人们便可测出散射截面积,而不需要知道实际的发射功率和接收机增益。
图12.12 连续波散射仪系统框图:(a)独立的发射机和接收机校准法;(b)利用接收和发射功率比的校准方法由于天线方向图和绝对增益是未知的,图12.12所示的校准方法尚不完善。
而要精确测量增益是非常困难的,因而,绝对的校准可通过比较被测目标的接收信号(经适当的校正)和一个标准目标的接收信号获得。
标准目标可以是金属球、龙伯(Luneburg)透镜反射器、金属板、角反射器或有源雷达校准器(ARCs,即转发器)[58]。
在无源校准器中,龙伯透镜反射器是最佳的,这是由于它具有大的截面积(相对它的体积而言)和宽的方向图,从而使其校准不苛刻。
龙伯透镜反射器常用来生成小舰船的强雷达目标,并且它们可从市面上的公司中获得。
至于不同无源校准目标的相对指标可参阅Ulaby, Moore和Fung 等人的文献[59]。
理想接收机的输入与输出之间成线性响应关系,因此,在某一输入电平上校准一次,应对所有电平都有效。
但是,由于检波器特性和放大器被强信号饱和等原因,一般接收机具有非线性特性。
图12.13示出一条典型的接收机输入-输出关系曲线。
图中,输入信号中两个相等的增量(∆i)因曲线的非线性在输出端产生不同的增量。
由于这个原因,接收机必须在输入电平范围内进行校准,并在数据处理过程中对非线性加以补偿。
连续波散射仪依据天线波束来识别不同入射角度和不同目标。
对它们通常做如下假定:天线方向图在3 dB点之内增益恒定,而在3 dB点之外增益为零,显然,这是不准确的。
如果大目标出现在主瓣的两侧图12.13 典型的接收机输入-输出曲线(显示出非线性的影响)或出现在副瓣中,则它们产生的信号对回波影响很大,以至使回波发生明显的变化。
由于数据简化过程认为这个改变了的信号来自主瓣方向,所以得到的σ0值是错误的。
由于垂直入射的回波信号一般都很强,垂直入射方向的响应常常会引起麻烦。
故必须知道精确的天线方向图,并在数据分析时予以考虑。
具有高副瓣的方向图显然是不能采用的。
散射系数可用下式确定:⎰π=照射区R A G P P t t r 40232d )4(σλ 式中,积分区是雷达的主要照射面积,副瓣照射区域亦包括在内。
一般假定σ 0在照射区域内为常数,因此,⎰π=照射区R A G P P t t r 42302d )4(σλ (12.17) 只有当天线将辐射能量限制在一个很小的角度和一个相当均匀的区域内,上述假定才是正确的。