自动控制原理 实验报告3
- 格式:doc
- 大小:111.00 KB
- 文档页数:3

一、实训目的本次实训旨在通过实际操作和实验,加深对自动控制原理的理解,掌握控制系统分析和设计的基本方法,提高动手能力和分析问题、解决问题的能力。
通过实训,使学生能够:1. 理解自动控制系统的基本组成和原理;2. 掌握典型控制系统的时域响应和频域响应分析方法;3. 学会使用实验设备进行控制系统实验,并能够分析实验结果;4. 培养团队协作和沟通能力。
二、实训仪器与设备1. 自动控制原理实验台;2. 信号发生器;3. 数据采集器;4. 计算机;5. 控制系统模拟软件。
三、实训内容1. 控制系统结构分析通过实验台搭建一个典型的控制系统,分析其结构,包括各个环节的功能和相互关系。
2. 时域响应实验对搭建的控制系统进行阶跃响应实验,记录并分析系统的输出波形,计算超调量、上升时间、调节时间等性能指标。
3. 频域响应实验对搭建的控制系统进行频率特性实验,记录并分析系统的幅频特性、相频特性,绘制Bode图。
4. 控制系统设计根据实验结果,对控制系统进行设计,包括PID参数整定、控制器设计等。
四、实验过程1. 搭建控制系统根据实验要求,搭建一个典型的控制系统,包括控制器、执行器、被控对象等环节。
2. 进行阶跃响应实验使用信号发生器产生阶跃信号,输入到控制系统中,记录输出波形,并计算超调量、上升时间、调节时间等性能指标。
3. 进行频率特性实验使用信号发生器产生不同频率的正弦信号,输入到控制系统中,记录输出波形,并绘制Bode图。
4. 控制系统设计根据实验结果,对控制系统进行设计,包括PID参数整定、控制器设计等。
五、实验结果与分析1. 阶跃响应实验通过阶跃响应实验,可以分析系统的稳定性和动态性能。
例如,超调量反映了系统的振荡程度,上升时间反映了系统的响应速度,调节时间反映了系统达到稳态所需的时间。
2. 频率特性实验通过频率特性实验,可以分析系统的频率响应特性。
例如,幅频特性反映了系统对不同频率信号的放大倍数,相频特性反映了系统对不同频率信号的相位延迟。

《自动控制原理》自动控制PID实验报告课程名称自动控制原理实验类型:实验项目名称:自动控制PID一、实验目的和要求1、学习并掌握利用MATLAB 编程平台进行控制系统复数域和频率域仿真的方法。
2、通过仿真实验研究并总结PID 控制规律及参数对系统特性影响的规律。
3、实验研究并总结PID 控制规律及参数对系统根轨迹、频率特性影响的规律,并总结系统特定性能指标下根据根轨迹图、频率响应图选择PID 控制规律和参数的规则。
二、实验内容和原理一)任务设计如图所示系统,进行实验及仿真程序,研究在控制器分别采用比例(P)、比例积分(PI)、比例微分(PD)及比例积分微分(PID)控制规律和控制器参数(Kp、Ki、Kd)不同取值时,控制系统根轨迹和阶跃响应的变化,总结pid 控制规律及参数变化对系统性能、系统根轨迹、系统阶跃响应影响的规律。
具体实验容如下:1、比例(P)控制,设计参数Kp 使得系统处于过阻尼、临界阻尼、欠阻尼三种状态,并在根轨迹图上选择三种阻尼情况的Kp 值,同时绘制对应的阶跃响应曲线,确定三种情况下系统性能指标随参数Kp 的变化情况。
总结比例(P)控制的规律。
2、比例积分(PI)控制,设计参数Kp、Ki 使得由控制器引入的开环零点分别处于:1)被控对象两个极点的左侧;2)被控对象两个极点之间;3)被控对象两个极点的右侧(不进入右半平面)。
分别绘制三种情况下的根轨迹图,在根轨迹图上确定主导极点及控制器的相应参数;通过绘制对应的系统阶跃响应曲线,确定三种情况下系统性能指标随参数Kp 和Ki 的变化情况。
总结比例积分(PI)控制的规律。
3、比例微分(PD)控制,设计参数Kp、Kd 使得由控制器引入的开环零点分别处于:1)被控对象两个极点的左侧;2)被控对象两个极点之间;66 3)被控对象两个极点的右侧(不进入右半平面)。
分别绘制三种情况下的根轨迹图,在根轨迹图上确定控制器的相应参数;通过绘制对应的系统阶跃响应曲线,确定三种情况下系统性能指标随参数Kp 和Kd 的变化情况。
南昌大学实验报告学生姓名:黄佐财学号:6100308118 专业班级:电力系统082实验类型:■验证□综合□设计□创新实验日期:2010.11.30 实验成绩:一、实验项目名称:三阶系统的瞬态响应和稳定性二、实验要求1.了解和掌握典型三阶系统模拟电路的构成方法及Ⅰ型三阶系统的传递函数表达式。
2.熟悉劳斯(ROUTH)判据使用方法。
3.应用劳斯(ROUTH)判据,观察和分析Ⅰ型三阶系统在阶跃信号输入时,系统的稳定、临界稳定及不稳定三种瞬态响应。
三、主要仪器设备及耗材1.计算机一台(Windows XP操作系统)2.AEDK-labACT自动控制理论教学实验系统一套3.LabACT6_08软件一套四、实验内容和步骤本实验用于观察和分析三阶系统瞬态响应和稳定性。
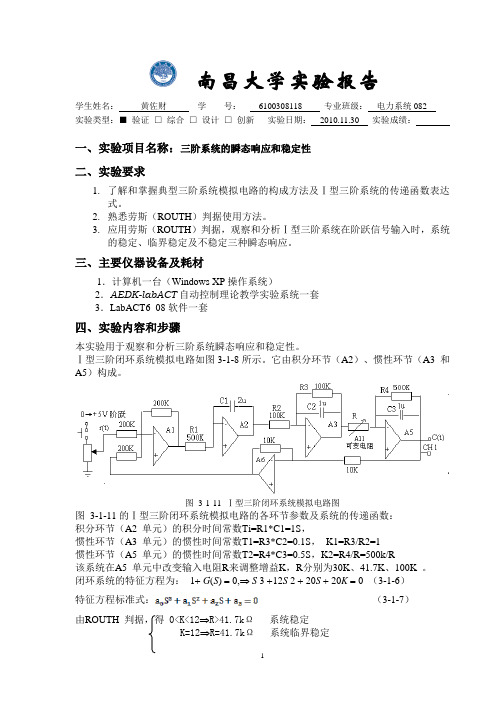
Ⅰ型三阶闭环系统模拟电路如图3-1-8所示。
它由积分环节(A2)、惯性环节(A3 和A5)构成。
图3-1-11 Ⅰ型三阶闭环系统模拟电路图图3-1-11的Ⅰ型三阶闭环系统模拟电路的各环节参数及系统的传递函数:积分环节(A2 单元)的积分时间常数Ti=R1*C1=1S,惯性环节(A3 单元)的惯性时间常数T1=R3*C2=0.1S,K1=R3/R2=1惯性环节(A5 单元)的惯性时间常数T2=R4*C3=0.5S,K2=R4/R=500k/R该系统在A5 单元中改变输入电阻R来调整增益K,R分别为30K、41.7K、100K 。
闭环系统的特征方程为:1+ G(S) = 0,⇒ S 3 +12S 2 + 20S + 20K = 0 (3-1-6)特征方程标准式:(3-1-7)由ROUTH 判据,得 0<K<12⇒R>41.7kΩ系统稳定K=12⇒R=41.7kΩ系统临界稳定K>12 R<41.7k Ω 系统不稳定Ⅰ型三阶闭环系统模拟电路图见图3-1-11,分别将(A11)中的直读式可变电阻调整到30K 、41.7K 、100K ,跨接到A5 单元(H1)和(IN )之间,改变系统开环增益进行实验。

⾃动控制原理实验报告实验名称:实验⼀控制系统建模的Matlab ⽅法实验时间:实验地点:实验⽬的:1.了解Matlab 软件的基本使⽤⽅法 2.掌握常⽤的系统建模命令实验内容:1.⽤Matlab 描述6852)(232++++=s ss ss G⽅法⼀: fenzi=[1 0 2]; fenmu=[1 5 8 6]; g=tf(fenzi,fenmu) ⽅法⼆:g=tf([1 0 2],[1 5 8 6])2.已知某系统的传递函数为6852)(23++++=s ss s s G ,绘制系统的零极点分布图。
运⾏程序并记录结果。
num=[1 2]; den=[1 5 8 6];[z,p,k]=tf2zp(num,den) pzmap(p,z) 3.已知441)(221+++=s ss s G ,61)(2+=s s G ,101)(++=s s s H ,求化简结果。
g1=tf([1 0 1],[1 4 4]); g2=tf([1],[1 6]); sys1=series(g1,g2)sys2=parallel(g1,g2)h=tf([1 1],[1 10]); sys3=feedback(sys1,h)实验名称:实验⼆线性系统时域分析的Matlab ⽅法实验时间:实验地点:实验⽬的:1.掌握线性系统时域分析的常⽤命令 2.能编程实现系统时域分析3.进⼀步熟悉Matlab 软件的使⽤实验内容:1.已知系统的特征⽅程为05432234=++++s s s s ,求系统特征根 p=[1 2 3 4 5]; r=roots(p)2.某⼆阶系统的闭环传递函数为222)(nn nw s w sw s G ++=ξ,其中s rad w n /5=,编程实现不同阻尼⽐情况下⼆阶系统单位阶跃响应的仿真。
写出对语句的注释。
fenzi=[25]; k1=-0.5; k2=0; k3=0.7; k4=1.0; k5=1.2; fenmu1=[1 2*k1*5 25]; fenmu2=[1 2*k2*5 25]; fenmu3=[1 2*k3*5 25]; fenmu4=[1 2*k4*5 25]; fenmu5=[1 2*k5*5 25];t=0:0.1:10;c1=step(fenzi,fenmu1,t); c2=step(fenzi,fenmu2,t); c3=step(fenzi,fenmu3,t); c4=step(fenzi,fenmu4,t); c5=step(fenzi,fenmu5,t); figure plot(t,c1)title('阻尼⽐-0.5') gridfigure plot(t,c2)title('阻尼⽐0')gridfigureplot(t,c3,t,c4,t,c5); xlabel('时间') ylabel('输出') grid实验名称:实验三线性系统根轨迹分析的Matlab ⽅法实验时间:实验地点:实验⽬的:1.掌握线性系统根轨迹分析的Matlab ⽅法 2.能编程绘制已知系统的根轨迹 3.掌握分析仿真结果的⽅法实验内容:1.已知单位负反馈系统的开环传递函数为)15.0)(12.0()(1++=s s s Ks G ,)12()1()(2++=s s s K s G,)3)(2()5()(1+++=s s s s K s G ,分别编程绘制系统根轨迹,并记录仿真结果。
自动控制原理实验报告课程名称 自动控制原理 成 绩 实验项目 控制系统的根轨迹作图 指导教师 王春玲 学生姓名 张利国 学号 200800804010 班级专业 08电科本 实验地点 综合楼205 实验日期 2010 年 11 月 24 日一、实验目的1.利用计算机完成控制系统的根轨迹作图;2.了解控制系统根轨迹图的一般规律;3.利用根轨迹进行系统分析及校正。
二、实验步骤1.在Windows 界面上用鼠标双击matlab 图标,即可打开MATLAB 命令平台。
2.练习相关M 函数根轨迹作图函数:格式1:rlocus(sys) 格式2:rlocus(sys,k)格式3:r=rlocus(sys) 格式4:[r,k]=rlocus(sys)函数功能:绘制系统根轨迹图或者计算绘图变量。
格式1:控制系统的结构图如图所示。
输入变量sys 为LTI 模型对象,k 为机器自适应产生的从0→∞的增益向量,绘制闭环系统的根轨迹图。
格式2:k 为人工给定的增益向量。
格式3:返回变量格式,不作图。
r 为返回的闭环根向量。
格式4:返回变量r 为根向量,k 为增益向量,不作图。
三、实验内容给定如下各系统的开环传递函数,作出它们的根轨迹图,并完成给定要求。
1. )2)(1()(01++=s s s k s G g程序:k=1; %零极点模型的增益值z=[]; %零点p=[0,-1,-2]; %极点sys=zpk(z,p,k); rlocus(sys)根轨迹图:要求: (1)准确记录根轨迹的起点.终点与根轨迹的条数共三条;(2)确定根轨迹的分离点与相应的根轨迹增益分离点:-0.423+7.65e-009i ;根轨迹增益为0.385。
(3)确定临界稳定时的根轨迹增益k gL上下的根轨迹增益都一样,都是6.02。
2. )164)(1()1()(202++-+=s s s s s k s G g要求: 确定根轨迹与虚轴交点并确定系统稳定的根轨迹k g 增益范围。
实验三 线性定常系统的稳态误差一、实验目的1. 通过本实验,理解系统的跟踪误差与其结构、参数与输入信号的形式、幅值大小之间的关系;2. 研究系统的开环增益K 对稳态误差的影响。
二、实验设备同实验一。
三、实验内容1. 观测0型二阶系统的单位阶跃响应和单位斜坡响应,并实测它们的稳态误差;2. 观测I 型二阶系统的单位阶跃响应和单位斜坡响应,并实测它们的稳态误差;3. 观测II 型二阶系统的单位斜坡响应和单位抛物坡,并实测它们的稳态误差。
四、实验原理通常控制系统的方框图如图4-1所示。
其中G(S)为系统前向通道的传递函数,H(S)为其反馈通道的传递函数。
图4-1由图4-1求得)()()(11)(S R S H S G S E +=(1)由上式可知,系统的误差E(S)不仅与其结构和参数有关,而且也与输入信号R(S)的形式和大小有关。
如果系统稳定,且误差的终值存在,则可用下列的终值定理求取系统的稳态误差:)(lim 0S SE e s ss →=(2)本实验就是研究系统的稳态误差与上述因素间的关系。
下面叙述0型、I 型、II 型系统对三种不同输入信号所产生的稳态误差ss e 。
1.0型二阶系统设0型二阶系统的方框图如图4-2所示。
根据式(2),可以计算出该系统对阶跃和斜坡输入时的稳态误差:图4-2 0型二阶系统的方框图1) 单位阶跃输入(sS R 1)(=) 3112)1.01)(2.01()1.01)(2.01(lim 0=⨯+++++⨯=→S S S S S S e S ss图表 1仿真结果中可以看到,读到的误差值为324.506mV ,基本符合理论的推算结果。
Matlab 仿真2) 单位斜坡输入(21)(s S R =) ∞=⨯+++++⨯=→2012)1.01)(2.01()1.01)(2.01(lim SS S S S S e S ss上述结果表明0型系统只能跟踪阶跃输入,但有稳态误差存在,其计算公式为:Pss K R e +=10其中)()(lim 0S S H S G K p →≅,R 0为阶跃信号的幅值。
第1篇一、实验目的1. 理解自控制原理的基本概念和基本方法。
2. 掌握典型控制系统的组成和基本工作原理。
3. 学习使用实验仪器,进行控制系统模拟实验。
4. 分析和评估控制系统的性能指标,提高对控制系统设计和优化的认识。
二、实验仪器与设备1. EL-AT-III型自动控制系统实验箱一台2. 计算机一台3. 万用表一个三、实验原理1. 自控制原理基本概念:自控制原理是研究如何利用反馈信息来控制系统的行为,使其达到预定的目标。
其基本原理是:通过将系统的输出信号反馈到输入端,与输入信号进行比较,产生误差信号,然后根据误差信号调整系统的控制策略,以达到控制目标。
2. 典型控制系统组成:典型控制系统通常由控制器、被控对象、反馈环节和执行机构组成。
3. 控制系统模拟实验:利用实验箱和计算机,通过模拟电路搭建典型控制系统,进行实验研究。
四、实验内容1. 实验一:典型环节及其阶跃响应- 实验目的:掌握控制模拟实验的基本原理和一般方法,掌握控制系统时域性能指标的测量方法。
- 实验步骤:1. 搭建一阶系统的模拟电路。
2. 通过计算机等测量仪器,测量系统的输出,得到系统的动态响应曲线及性能指标。
3. 改变系统的参数,分析参数对系统性能的影响。
2. 实验二:二阶系统阶跃响应- 实验目的:了解二阶系统的阶跃响应特性,掌握二阶系统的性能指标。
- 实验步骤:1. 搭建二阶系统的模拟电路。
2. 通过计算机等测量仪器,测量系统的输出,得到系统的阶跃响应曲线及性能指标。
3. 分析二阶系统的性能指标,如上升时间、超调量、调节时间等。
3. 实验三:连续系统串联校正- 实验目的:学习连续系统串联校正方法,提高控制系统的性能。
- 实验步骤:1. 搭建连续系统的模拟电路。
2. 分析系统的性能指标,确定校正方法。
3. 通过计算机等测量仪器,测量校正后的系统输出,评估校正效果。
五、实验结果与分析1. 实验一:通过搭建一阶系统的模拟电路,测量系统的输出,得到系统的动态响应曲线及性能指标。
实验三 线性系统的频域分析一、实验目的1.掌握用MATLAB 语句绘制各种频域曲线。
2.掌握控制系统的频域分析方法。
三、实验内容 四、实验报告1.根据内容要求,写出调试好的MATLAB 语言程序,及对应的结果。
2. 记录显示的图形,根据实验结果与各典型环节的频率曲线对比分析。
3. 记录并分析ζ对二阶系统bode 图的影响。
4.根据频域分析方法分析系统,说明频域法分析系统的优点。
5.写出实验的心得与体会。
1.典型二阶系统2222)(nn ns s s G ωζωω++=绘制出6=n ω,1.0=ζ,0.3,0.5,0.8,2的bode 图,记录并分析ζ对系统bode 图的影响。
num =[0 0 36]; den1=[1 1.2 36]; den2=[1 3.6 36]; den3=[1 6.0 36]; den4=[1 9.6 36]; den5=[1 24 36]; w=logspace(-2,3,100); bode(num,den1,w); gridtext (4.2,-15,'¦Î=0.1') holdbode(num,den2,w); text (2.5,-22,'¦Î=0.3') bode(num,den3,w); text (13.5,-150,'¦Î=0.5') bode(num,den4,w); text (24,-157,'¦Î=0.8')bode(num,den5,w); text (1.4,-45,'¦Î=2.0')-100-80-60-40-20020M a g n i t u d e (d B)10-210-110101102103P h a s e (d e g )Bode DiagramFrequency (rad/sec)结果分析:从图中可看出ζ越小,中频段振荡越剧烈。
学院 课 实验报告
级 班
姓名: 老师评定:
实验题目: 系统校正
一. 实验内容
1. 原系统的原理方块图:见图3-1所示
图3-1 未校正系统的方块图
由闭环传函
要求设计串联校正装置,使系统满足下述性能指标:
由理论推导(可参照有关自控原理书)得,校正网络的传递函数为:
1
0.05S 10.5S (S)G C ++=
所以校正后的方块图如图3-2所示:
图3-2 校正后系统的方块图
⒉ 原系统及校正后的模拟电路图:见图3-3及图3-4
图3-3 未校正系统的模拟电路图
图3-4 校正后系统模拟电路
⒊实验内容及步骤
⑴测量未校正系统的性能指标。
准备:将“信号源单元”(U1 SG)的ST插针用“短路块”短接。
实验步骤:
①按图3-3接线。
②加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp和调节时间ts,将曲线及参数记录下来。
⑵测量校正系统的性能指标。
①按图3-4接线。
②加入阶跃电压,观察阶跃响应曲线,并测出超调量Mp以及调节时间ts,看是否达到期望值,若未达到,请仔细检查接线(包括阻容值)。
二.实验分析
1.未校正之前的系统阶跃响应曲线如下:
理论值Mp = 60.4% tp = 3.5s
测量值Mp= 60% tp = 2.8s
2.校正之后的系统阶跃响应曲线如下:
理论值Mp = 16.3% tp = 0.35s
测量值Mp = 5% tp = 0.42s。