研究生自适应信号处理考试题
- 格式:doc
- 大小:125.00 KB
- 文档页数:5
武汉工程大学2023年全国硕士研究生招生考试考试科目代码及名称: 846数字图像处理一、填空题(本大题共10空,每空1 分,共10分)1. 为了适应数字计算机的处理,必须对连续图像函数进行______和______的数字化。
2. Hough变换可用于检测图像中的______,______变换常用于图像的时频分析。
3. 噪声与图像场景内容在统计上的差异在于噪声是______的,在频域中的差别在于噪声通常属于______分量。
4. 常见滤波平滑方法在去除噪声的同时也______了图像边缘,是因为图像边缘在频域中主要分布在______频。
5. ______滤波算法具有线性复杂度,中值滤波算法具有______复杂度。
二、选择题(本大题共10小题,每小题1分,共10分)1. 下列滤波器中,用于去除图像中高斯噪声最合适的滤波器是:( )A. 均值滤波器B. 中值滤波器C. 维纳滤波器D. 高斯滤波器2. 以下关于图像复原,说法正确的是:( )A. 一般是不适定问题(反问题)B. 由于噪声等影响一般无法求精确解C. 退化过程主要建模为图像卷积模型D. 以上都正确3. 下面不属于数字图像处理研究内容的是:( )A. 图像打印B. 图像增强C. 图像去噪D. 图像分割4. 下面不属于灰度插值方法的是:( )A. 最近邻法B. 双线性法C. 同态滤波法D. 以上都不属于5. 下列可用于图像锐化和边缘提取的滤波方法是:( )A. 低通滤波B. 高通滤波C. 均值滤波D. 中值滤波6. 直方图均衡化技术对应的灰度变换函数是:( )A. 幂律函数B. 对数函数C. 累积分布函数D. 取反函数7. 图像灰度动态范围拉伸操作属于:( )A. 图像去噪B. 边缘提取C. 图像增强D. 图像分割8. 下面属于线性变换的操作是:( )A. 对数变换B. 指数变换C. 伽马变换D. 以上都不是9. 下列不属于频率域图像增强的技术是:( )A. 低通滤波B. 高通滤波C.中值滤波D. 同态滤波10. 下列哪些属于直方图的应用:( )A. 判断图像量化是否恰当B. 确定图像二值化的阈值C. 计算图像信息量H(熵) D.以上都属于三、判断题(T/F)(本大题共10小题,每小题1分,共10分)1. 任意两幅图像的直方图都是不同的。
2024年考研高等数学三信号处理的数学原理历年真题【提示】本文按照考研高等数学三信号处理的数学原理历年真题的内容要求,采用文章的格式来回答。
以下是相关内容。
一、引言信号处理作为一门重要学科,广泛应用于通信、图像处理、音频处理等领域。
为帮助考生更好地理解和应用数学原理,本文将重点回顾和解析2024年考研高等数学三信号处理部分的历年真题。
二、离散信号处理概述离散信号处理是信号处理中的重要分支,它研究的是离散时间序列信号的获取、处理和解释。
通过对离散信号进行采样、量化和编码,可以实现信号的数字化表示。
三、离散时间傅里叶变换(DTFT)离散时间傅里叶变换是离散信号处理中常用的数学工具,用于将离散时间域中的信号变换到离散频率域中。
离散时间傅里叶变换的数学原理可以用以下公式表示:$X(e^j\omega) = \sum_{n=-\infty}^{\infty} x[n]e^{-j\omega n}$在解决离散信号频率分析问题时,可以通过计算离散时间傅里叶变换来获取信号的频谱信息。
四、Z变换与系统的频域特性Z变换是离散信号处理中常用的工具,用于处理离散系统的时域特性和频域特性。
在离散信号处理中,系统可以用差分方程表示,在频域中可以通过Z变换将其表达为多项式形式。
五、数字滤波器设计与应用数字滤波器是离散信号处理中常用的工具,能够对信号进行滤波和处理。
常见的数字滤波器包括低通滤波器、高通滤波器、带通滤波器和带阻滤波器等。
六、离散傅里叶变换(DFT)离散傅里叶变换是离散信号处理中常用的数学工具,可以将离散时间域中的信号变换到离散频率域中。
与离散时间傅里叶变换不同的是,离散傅里叶变换是对有限长序列进行变换,可以通过FFT(快速傅里叶变换)算法高效地计算。
七、小结本文回顾了2024年考研高等数学三信号处理的数学原理历年真题。
通过对离散信号处理的概述、离散时间傅里叶变换、Z变换与系统的频域特性、数字滤波器设计与应用、离散傅里叶变换等主题内容的论述,希望能够对考生们在备考信号处理时有所帮助。

1. 理想低通滤波器是(C )A 因果系统B 物理可实现系统C 非因果系统D 响应不超前于激励发生的系统2. 某系统的系统函数为)(s H ,若同时存在频响函数)(ωj H ,则该系统必须满足条件(D ) A 时不变系统 B 因果系统 C 线性系统 D 稳定系统3一个LTI 系统的频率响应为3)2(1)(+=ωωj j H ,该系统可由(B ) A 三个一阶系统并联 B 三个一阶系统级联 C 一个二阶系统和一个一阶系统并联 D 以上全对 4.下列关于冲激函数性质的表达式不正确的是(A ) A )(1)(t aat δδ= B )()0()()(t f t t f δδ= C)()(t d tεττδ=⎰∞- D )()(t t δδ=-5. 6.7.微分方程f fy y y y 225)1()1()2()3(+=+++所描述系统的状态方程和输出方程为(A )A[]xy t f x X 012)(100512100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=• B []xy t f x X 012)(100215100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=•C []x y t f x X 210)(100512100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=•D []xy t f x X 210)(100215100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=•8. 满足傅氏级数收敛条件时,周期信号)(t f 的平均功率(D )A 大于各谐波分量平均功率之和B 不等于各谐波分量平均功率之和C 小于各谐波分量平均功率之和D 等于各谐波分量平均功率之和 9.连续时间信号)1000cos(]50)100sin([)(t tt t f ⨯=,该信号的频带为(B ) A 100 rad/s B 200 rad/s C 400rad/s D 50 rad/s10. 若)(t f 为实信号,下列说法中不正确的是(C ) A 该信号的幅度谱为偶对称 B 该信号的相位谱为奇对称C 该信号的频谱为实偶信号D 该信号的频谱的实部位偶函数,虚部位奇函数11.连续周期信号的频谱有(D )A 连续性、周期性B 连续性、收敛性C 离散性、周期性D 离散性、收敛性12. 如果周期函数满足)()(t x t x --=,则其傅氏级数中(C )A 只有余弦项B 只有奇次谐波项C 只有正弦项D 只有偶次谐波项13. 一个线性时不变得连续时间系统,其在某激励信号作用下的自由响应为)()(3t e e t t ε--+,强迫响应为)()1(2t e t ε--,则下面的说法正确的是(B )A 该系统一定是二阶系统B 该系统一定是稳定系统C 零输入响应中一定包含)()(3t e e t t ε--+D 零状态响应中一定包含)()1(2t e t ε--14.离散时间系统的差分方程为]1[2][4]1[][2-+=--n x n x n y n y ,则系统的单位抽样响应][n h 为(C )A )()21(2n u nB )1()21(2-n u nC )1()21(4)(2-+n u n nδ D )1()21(4-n u n15. )23(t x -的波形如图1所示,则)(t x 的波形应为 (A)二 1、 2、3、按照信号的能量或功率为有限值,信号可分为能量信号和功率信号。
自适应滤波复习题自适应滤波复习题自适应滤波是一种常用的信号处理技术,它可以根据信号的特性自动调整滤波器的参数,从而实现对信号的优化处理。
在实际应用中,自适应滤波广泛应用于语音处理、图像处理、雷达信号处理等领域。
本文将通过一些复习题来回顾和巩固自适应滤波的相关知识。
1. 什么是自适应滤波?自适应滤波是一种根据输入信号的特性自动调整滤波器参数的信号处理技术。
它通过不断地更新滤波器的权值,使得滤波器能够适应信号的变化,从而实现对信号的优化处理。
2. 自适应滤波的原理是什么?自适应滤波的原理是基于最小均方误差准则。
它通过最小化输入信号与滤波器输出之间的均方误差,来更新滤波器的权值。
具体而言,自适应滤波器将输入信号通过滤波器得到输出信号,然后将输出信号与期望输出信号进行比较,计算均方误差,并根据误差的大小来更新滤波器的权值。
通过不断地迭代更新,最终得到最优的滤波器参数。
3. 自适应滤波的应用领域有哪些?自适应滤波广泛应用于语音处理、图像处理、雷达信号处理等领域。
在语音处理中,自适应滤波可以用于降噪、回声消除等任务。
在图像处理中,自适应滤波可以用于图像增强、边缘检测等任务。
在雷达信号处理中,自适应滤波可以用于目标检测、目标跟踪等任务。
4. 自适应滤波有哪些常见的算法?自适应滤波有很多不同的算法,其中最常见的算法包括最小均方误差(LMS)算法和最小二乘(RLS)算法。
LMS算法是一种迭代算法,它通过不断地更新滤波器的权值来逼近最优解。
RLS算法是一种批处理算法,它通过一次性处理所有的样本来得到最优解。
此外,还有一些改进的自适应滤波算法,如快速自适应滤波算法(FNLMS)和递归最小二乘(RLSL)算法等。
5. 自适应滤波的性能评价指标有哪些?自适应滤波的性能评价指标包括均方误差(MSE)、信噪比(SNR)和功率谱密度(PSD)等。
均方误差是衡量滤波器输出与期望输出之间的误差的指标,通常希望均方误差越小越好。
信噪比是衡量滤波器输出与输入信号之间的信噪比的指标,通常希望信噪比越大越好。

2024年考研数学信号处理中的数学题目详解与答案在2024年的考研数学信号处理科目中,数学题目是重点考察的内容之一。
下面将对信号处理数学题目进行详解,并提供答案供大家参考。
一、题目一题目描述:给定一个信号处理系统的传输函数H(z),要求计算系统的频率响应。
解答:在信号处理中,系统的传输函数常用以描述信号输入和输出之间的关系。
频率响应则反映了系统对不同频率信号的响应情况。
根据题目给定的传输函数H(z),我们可以将其转换为z域表达式。
接下来,将z域表达式转换为频率域表达式,即可得到系统的频率响应。
最后,我们可以根据频率响应的表达式,计算系统在不同频率下的响应值。
答案:根据传输函数H(z)计算频率响应,并列出不同频率下的响应值。
二、题目二题目描述:信号处理系统中的数字滤波器具有一个单位冲激响应h(n),要求计算该滤波器的频率响应。
解答:单位冲激响应是数字滤波器的重要性质之一。
频率响应则描述了滤波器对不同频率的信号的响应情况。
根据题目给出的单位冲激响应h(n),我们可以通过对其进行傅里叶变换,得到滤波器的频率响应。
最后,我们可以绘制出频率响应的图像或列出不同频率下的响应值,以便进一步分析滤波器的性能。
答案:通过对单位冲激响应h(n)进行傅里叶变换,计算得到滤波器的频率响应,并展示该频率响应的图像或者列出不同频率下的响应值。
三、题目三题目描述:信号处理系统中的数字滤波器具有一个差分方程y(n) =x(n) + 0.8y(n-1),其中x(n)为输入信号,y(n)为输出信号。
要求计算该滤波器的单位冲激响应。
解答:差分方程是描述数字滤波器行为的数学公式。
通过求解差分方程得到单位冲激响应,可以帮助我们了解滤波器的特性。
根据题目给出的差分方程y(n) = x(n) + 0.8y(n-1),我们需要对其进行求解。
首先,我们可以采用Z变换的方法,将差分方程转化为滤波器的传输函数H(z)。
然后,根据传输函数H(z)进行反变换,得到滤波器的单位冲激响应。
![统计与自适应信号处理(ADSP)chapterchaper 6-2 Levinson-Durbin Algorithm -2013.11.15 [修复的]](https://uimg.taocdn.com/2ddbbbc4a1c7aa00b52acbb5.webp)
RLS自适应平衡器计算机实验课程名称:自适应信号处理院系:电子与信息工程学院姓名:学号:授课教师:邹斌哈尔滨工业大学哈尔滨工业大学实验报告目录一.实验目的:-. .1. -二.实验内容:-. .1. -三.程序框图-. .3. -四.实验结果及分析-. .4. -4.1 高信噪比(信噪比为30dB)情况下特征值扩散度的影响.. - 4-4.2 信噪比(信噪比为10dB)情况下特征值扩散度的影响.... - 5-五.实验结论-. .5. -RLS 算法的自适应平衡器计算机实验. 实验目的:1.进一步学习自适应平衡器的原理了解算法应用条件。
2.学习最小二乘算法的约束条件以及理论基础。
3.分析比较RLS算法与LMS 算法的异同。
4.独立编写算法程序,进一步理解最小二乘自适应滤波算法的应用方法。
. 实验内容:在本次试验中取加权因子 1 ,根据试验一中相关内容设计线性离散通信信道的自适应均衡器,系统框图如图 2.1 所示。
随机数发生器( 1)产生用来探测信道的测试信号x n ,加到信道输入的随机序列x n 由伯努利序列组成,x n 1,随机变量x n具有零均值和单位方差, 输出经过适当的延迟可以用做训练系列的自适应滤波器的期望响应。
随机数发生器(2)用来产生干扰信道输出的白噪声源v(n) ,其均值为零,方差v20.001。
这两个发生器是彼此独立的。
信道的单位脉冲响应应用升余弦表示为参数W控制均衡器抽头输入的相关矩阵的特征值分布(R) ,并且特征值分布随着W 的增大而扩大h n20.5[1 cos( (n 2))]Wn 1,2,3(2-1)哈尔滨工业大学实验报告均衡器具有 M 11个抽头。
由于信道的脉冲响应 h n 关于 n 2时对称,均衡器的最 优抽头权值 w on 在 n 5时对称。
因此,信道的输入 x n 被延时了 2 57个样值,以便提供均衡器的期望响应。
在n 时刻,均衡器第 1 个抽头输入为3u(n)h k x(n k) v(n) (2-2)k1其中所有参数均为实数。
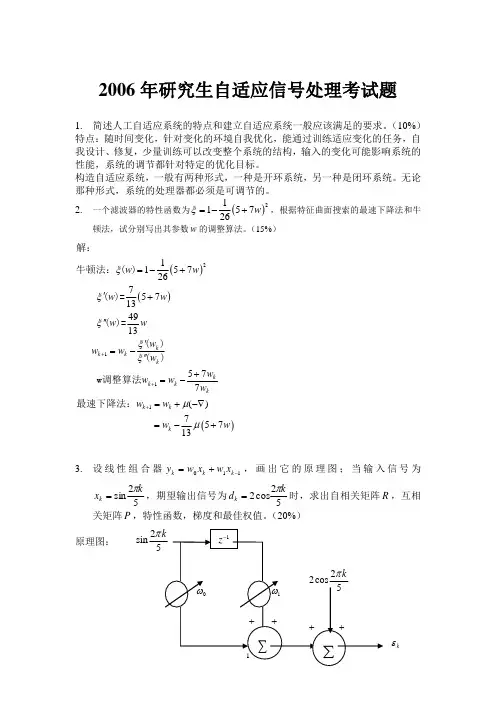
kε2006年研究生自适应信号处理考试题1. 简述人工自适应系统的特点和建立自适应系统一般应该满足的要求。
(10%) 特点:随时间变化,针对变化的环境自我优化,能通过训练适应变化的任务,自我设计、修复,少量训练可以改变整个系统的结构,输入的变化可能影响系统的性能,系统的调节都针对特定的优化目标。
构造自适应系统,一般有两种形式,一种是开环系统,另一种是闭环系统。
无论那种形式,系统的处理器都必须是可调节的。
2. 一个滤波器的特性函数为()2115726w ξ=-+,根据特征曲面搜索的最速下降法和牛顿法,试分别写出其参数w 的调整算法。
(15%)()()()2111115726757134913577()75713k k k k k k k kk k k w w w w w ww w w w w w w w w w w w ξξξξξμμ+++=-+'+'''=-''+=-=+-∇=-+解:牛顿法:() ()=()=()() w 调整算法最速下降法:3. 设线性组合器110-+=k k k x w x w y ,画出它的原理图;当输入信号为52sink x k π=,期望输出信号为52cos 2kd k π=时,求出自相关矩阵R ,互相关矩阵P ,特性函数,梯度和最佳权值。
(20%)原理图:[]k 2k 12k-1k-12T Tk 20.5 0.5cos x x 5R=E 2x x 0.5cos 0.552P=E 5=E[d ]+W RW-2P W=2+0.5[k k TTx x πππξ-⎡⎤⎢⎥⎡⎤=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎡⎤=⎢⎥⎣⎦k k k-1k-1解:自相关矩阵 互相关矩阵d x d x 0 -sin特性函数000111220101121 cos 25 ]225cos 1522=cos 2sin 255=20.5 0.5cos 520.5cos 0.55πωωπωωπωωππωωωωωππ⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦++∇⎡⎤⎢⎥⎢⎥⎢⎢⎣⎦0 -sin 0.5(+)+ 梯度2RW-2P=2010101*252+cos 522cos ++2sin 5522W 55ωπωπωωππωωππ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎥⎣⎦⎢⎥⎣⎦⎥⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦T 0 -2-sin =最佳权值=[2cot -2csc ]4. 设滤波器的自相关矩阵为300021018R ⎛⎫ ⎪= ⎪ ⎪⎝⎭,摄动为125P ⎛⎫ ⎪= ⎪ ⎪⎝⎭,写出最速下降法的权值调整算法,给出它们的收敛条件。
实用Harbin Institute of Technology自适应平衡器计算机实验课程名称:自适应信号处理院系:电子与信息工程学院姓名:学号:授课教师:邹斌哈尔滨工业大学一、实验目的:1. 深入掌握自适应平衡器的理论基础和以及它的可能用途。
2. 理解最小均方自适应算法的适用条件,以及最小均方自适应算法的理论推导。
3. 改变特征值扩散度)(R χ与步长参数μ,观察实验结果,深入理解理解这些参数对实验结果的重要性。
4. 探究在线性色散信道中使用最小均方自适应算法引起的失真问题。
二、实验内容:在此次实验中我们研究LMS 算法自适应均衡引起未知失真的线性色散信道问题。
假设数据是实数,图2.1表示用来进行该项研究的系统框图。
自适应均衡器用来纠正存在白噪声的信道的畸变。
通过随机数发生器1产生用来探测信道的测试信号n x ;通过随机数发生器2来产生干扰信道输出的白噪声源()v n 。
这两个发生器是相互独立的。
经过适当延迟,随机数发生器1页提供用作训练序列的自适应均衡器的期望相应。
加到信道输入的随机序列{}n x 由伯努利序列组成,其中1n x =±,随机变量n x 具有零均值和单位方差。
信道的单位脉冲响应应用升余弦表示为20.5[1cos((2))]1,2,30n n n h Wπ⎧+-=⎪=⎨⎪⎩,其他 (2-1)等价地,参数W 控制均衡器抽头输入的相关矩阵的特征值分布()χR ,并且特征值分布随着W 的增大而扩大。
随机数发生器2产生的序列是零均值,方差20.001v σ=。
随机噪声发生器(1)信道随机噪声发生器(2)延迟∑自适应横向滤波器∑nx nv +-ne图2.1 自适应均衡实验框图这里均衡器具有11M =个抽头。
由于信道的脉冲响应n h 关于2n =时对称,均衡器的最优抽头权值on w 在5n =时对称。
因此信道的输入n x 被延时了=∆2+5=7个样值,以便提供均衡器的期望响应。
通过选择匹配横向均衡器中点的合适延时Δ,LMS 算法能够提供信道响应的最小相位分量和非最小相位分量之逆。
现代信号处理Assignment题目1:如何设计维纳滤波器,并使得估计误差)(n e 在均方意义下最小。
即设计自适应滤波器使得估计误差)(n e 在最小均方误差(MMSE )意义下最小,即是求自适应系统满足MMSE 条件下的最佳权值和最小均方误差min ξ。
题目2:考虑如下图权值线性组合器,输入端引入随机信号k r ,其平均功率为20.01k E r ⎡⎤=⎣⎦;假设信号随机抽样相互独立,取16N =。
编程实现:(1) 画出LMS 算法性能曲面等值线,要求等值线权值间隔不超过1,标明坐标值、均方误差值和性能最小点位置及最小均方误差值,分别对应初始权值010,0.100w w μ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦和014,0.0510w w μ⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦绘出加权值收敛轨迹,迭代次数不小于100次;(2) 计算0.05μ=和0.10μ=时学习曲线的时间常数,绘出学习曲线并在学习曲线中观测时间常数,与理论计算值比较;(3) 计算0.05μ=和0.10μ=时的失调并比较;(4) 分析比较μ的大小对自适应滤波的影响。
要求:写出实验报告:包括原理、方法和结果,并附源代码(加必要的注释)和仿真数据结果。
题目1解:1)根据题图所给的滤波器模型可得误差kNπk 2sin)(ˆ)()(n d n d n e -=其中01ˆ()()(1)d n w u n w u n =⨯+⨯- 令权值01[]T W w w = ,输出1[,]T n n U u u -= 可得U W n d n e T ⨯-=)()(两边同时平方可得:W U n d W UU W n d n e T T T )(2)()(22-+=两边同时取数学期望可以得到均方误差:W U n d E W UU E W n d E n e E T T T ])([2][)]([)]([22-+=令[]T u E UU R = ,[()]T du E d n U R =,可得均方误差W R W R W n d E n e E MSE du T u T 2)]([)]([22-+===ξ可以看出2{()}E e n 是一个二次函数,在定义域内有唯一最小值,所以找到使2{()}E e n 最小值的点,就可以得到由上式可得最小的均方误差。
自适应信号处理课后题答案1.求下列R 的特征值设(1)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=4202630341R (2)⎥⎦⎤⎢⎣⎡-=2)3/exp(6)3/exp(632ππj j R解:(1)令λ为R 的特征值,则 (2)令λ为R 的特征值: 0)det(=-I R λ 0)det(=-I R λ即:042263034=---λλλ即:02)3/exp(6)3/exp(63=---λππλj j于是R 1的三个特征值分别为: 于是R 2 的两个特征值为: 1451454321-=,+=,λλλ= 5,021==λλ2.证明任何两个实数的单输入自适应线性组合器的特征向量矩阵均为: ⎥⎦⎤⎢⎣⎡-=111121Q 证明:由已知条件知相关矩阵为R :⎥⎦⎤⎢⎣⎡=a b b a R 则R 的特征值为:b a b a -=+=21,λλ当b a +=1λ时,⎥⎦⎤⎢⎣⎡--=-b b b b I R λ,则特征向量为:]1,1[11q x =当b a -=2λ时,⎥⎦⎤⎢⎣⎡=-b b b b I R λ,则特征向量为:]1,1[22-=q x 则特征向量为:⎥⎦⎤⎢⎣⎡-=111121Q3.如图3.1所示,若自适应系统的输入和期待响应分别为: (1))6/2cos(],6/)1(2sin[),6/2sin(10k d k x k x k k k πππ=-==(2)6/)]5.1(2[]6/)2(2[]6)1(2[1)6/2(04,,2--+-=+==k j k k j k j k k j k e d e e x e x ππππ试计算最佳权向量和最小均方误差输出,并说明在两种情况下的自适应系统有什么不同? 解:(1)由题中条件知:5.0][20=k x E 5.0][21=k x E[]25.010=*k k x x E[]00=k k x d E 4/3][1-=k k x d E 于是输入相关矩阵为:⎥⎦⎤⎢⎣⎡=5.025.025.05.0R ⎥⎦⎤⎢⎣⎡-=4/30P 则最优权为:⎥⎦⎤⎢⎣⎡-==*-1547.15774.01P R W opt 最小均方误差为:3889.0][2min -=-=opt T k W P d E ζ (2)由题中已知条件知:4][20=k x E 6/26/2212][ππj j k e e x E -++=6/308][πj k ke x d E =*6/6/144][ππj j k k e e x d E -*+= 6/46/21022][ππj j k k e e x x E --*+= 6/46/21122][ππj j k k e ex x E +=* 于是输入相关矩阵为:⎥⎦⎤⎢⎣⎡++++=---6/26/26/46/26/46/2222224ππππππj j j j j j e e e e e e R ⎥⎦⎤⎢⎣⎡+=-6/6/6/3448πππj j j e e e PR 的逆不存在, 则最优权为:⎥⎥⎦⎤⎢⎢⎣⎡-=j c c W opt3234 最小均方误差为:0][2min =-=opt T k W P d E ζ区别:(1)中输入为实数信号,得到的权值也实数权,(2)中输入为复数信号,权值为复数权4.设信号的相关矩阵和噪声的相关矩阵分别为:⎥⎦⎤⎢⎣⎡-=2)3/exp(6)3/exp(63ππj j R s及I R n 05.0=,试计算MSN 性能测度的最佳权向量解和输出最大信噪比。
1. 在数字信号处理中,傅里叶变换的主要作用是什么?A. 信号滤波B. 信号压缩C. 信号频谱分析D. 信号放大2. 下列哪种滤波器在频域中具有最陡峭的截止特性?A. 巴特沃斯滤波器B. 切比雪夫滤波器C. 椭圆滤波器D. 贝塞尔滤波器3. 在通信系统中,调制的主要目的是什么?A. 提高信号的功率B. 提高信号的频率C. 将信号转换为适合传输的形式D. 降低信号的噪声4. 下列哪个不是数字信号处理的基本操作?A. 采样B. 量化C. 编码D. 放大5. 在信号处理中,卷积运算的主要作用是什么?A. 信号的平滑处理B. 信号的频谱分析C. 信号的时域分析D. 信号的滤波6. 下列哪种信号处理技术可以用于语音识别?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络7. 在数字通信系统中,比特率与波特率的关系是什么?A. 比特率总是等于波特率B. 比特率总是大于波特率C. 比特率总是小于波特率D. 比特率与波特率没有直接关系8. 下列哪种调制技术可以实现较高的频谱效率?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制9. 在信号处理中,白噪声的特性是什么?A. 频谱均匀分布B. 频谱非均匀分布C. 频谱随时间变化D. 频谱随频率变化10. 下列哪种技术可以用于信号的去噪?A. 低通滤波B. 高通滤波C. 带通滤波D. 带阻滤波11. 在数字信号处理中,采样定理的主要作用是什么?A. 保证信号的完整性B. 保证信号的连续性C. 防止信号的混叠D. 提高信号的分辨率12. 下列哪种滤波器可以用于图像处理中的边缘检测?A. 低通滤波器B. 高通滤波器C. 带通滤波器D. 带阻滤波器13. 在通信系统中,信道编码的主要目的是什么?A. 提高信号的功率B. 提高信号的频率C. 提高信号的可靠性D. 降低信号的噪声14. 下列哪种信号处理技术可以用于音频压缩?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络15. 在数字信号处理中,量化误差的主要来源是什么?A. 采样频率B. 量化位数C. 信号幅度D. 信号频率16. 下列哪种调制技术可以实现较高的功率效率?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制17. 在信号处理中,窗函数的主要作用是什么?A. 信号的平滑处理B. 信号的频谱分析C. 信号的时域分析D. 信号的滤波18. 下列哪种技术可以用于信号的时频分析?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络19. 在数字通信系统中,符号率与波特率的关系是什么?A. 符号率总是等于波特率B. 符号率总是大于波特率C. 符号率总是小于波特率D. 符号率与波特率没有直接关系20. 下列哪种调制技术可以实现较高的抗干扰能力?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制21. 在信号处理中,高斯噪声的特性是什么?A. 频谱均匀分布B. 频谱非均匀分布C. 频谱随时间变化D. 频谱随频率变化22. 下列哪种技术可以用于信号的增强?A. 低通滤波B. 高通滤波C. 带通滤波D. 带阻滤波23. 在数字信号处理中,重采样的主要作用是什么?A. 保证信号的完整性B. 保证信号的连续性C. 防止信号的混叠D. 提高信号的分辨率24. 下列哪种滤波器可以用于图像处理中的平滑处理?A. 低通滤波器B. 高通滤波器C. 带通滤波器D. 带阻滤波器25. 在通信系统中,信道估计的主要目的是什么?A. 提高信号的功率B. 提高信号的频率C. 提高信号的可靠性D. 降低信号的噪声26. 下列哪种信号处理技术可以用于图像压缩?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络27. 在数字信号处理中,截断误差的主要来源是什么?A. 采样频率B. 量化位数C. 信号幅度D. 信号频率28. 下列哪种调制技术可以实现较高的数据传输速率?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制29. 在信号处理中,滤波器设计的主要目的是什么?A. 信号的平滑处理B. 信号的频谱分析C. 信号的时域分析D. 信号的滤波30. 下列哪种技术可以用于信号的非线性处理?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络31. 在数字通信系统中,误码率与信噪比的关系是什么?A. 误码率总是等于信噪比B. 误码率总是大于信噪比C. 误码率总是小于信噪比D. 误码率与信噪比没有直接关系32. 下列哪种调制技术可以实现较高的频谱利用率?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制33. 在信号处理中,椒盐噪声的特性是什么?A. 频谱均匀分布B. 频谱非均匀分布C. 频谱随时间变化D. 频谱随频率变化34. 下列哪种技术可以用于信号的降噪?A. 低通滤波B. 高通滤波C. 带通滤波D. 带阻滤波35. 在数字信号处理中,插值的主要作用是什么?A. 保证信号的完整性B. 保证信号的连续性C. 防止信号的混叠D. 提高信号的分辨率36. 下列哪种滤波器可以用于图像处理中的锐化处理?A. 低通滤波器B. 高通滤波器C. 带通滤波器D. 带阻滤波器37. 在通信系统中,信道均衡的主要目的是什么?A. 提高信号的功率B. 提高信号的频率C. 提高信号的可靠性D. 降低信号的噪声38. 下列哪种信号处理技术可以用于视频压缩?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络39. 在数字信号处理中,舍入误差的主要来源是什么?A. 采样频率B. 量化位数C. 信号幅度D. 信号频率40. 下列哪种调制技术可以实现较高的抗多径效应能力?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制41. 在信号处理中,滤波器阶数的主要作用是什么?A. 信号的平滑处理B. 信号的频谱分析C. 信号的时域分析D. 信号的滤波42. 下列哪种技术可以用于信号的自适应处理?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络43. 在数字通信系统中,信道容量与带宽的关系是什么?A. 信道容量总是等于带宽B. 信道容量总是大于带宽C. 信道容量总是小于带宽D. 信道容量与带宽没有直接关系44. 下列哪种调制技术可以实现较高的抗干扰能力?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制45. 在信号处理中,脉冲噪声的特性是什么?A. 频谱均匀分布B. 频谱非均匀分布C. 频谱随时间变化D. 频谱随频率变化46. 下列哪种技术可以用于信号的增强?A. 低通滤波B. 高通滤波C. 带通滤波D. 带阻滤波47. 在数字信号处理中,抽取的主要作用是什么?A. 保证信号的完整性B. 保证信号的连续性C. 防止信号的混叠D. 提高信号的分辨率48. 下列哪种滤波器可以用于图像处理中的边缘增强?A. 低通滤波器B. 高通滤波器C. 带通滤波器D. 带阻滤波器49. 在通信系统中,信道编码的主要目的是什么?A. 提高信号的功率B. 提高信号的频率C. 提高信号的可靠性D. 降低信号的噪声50. 下列哪种信号处理技术可以用于音频增强?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络51. 在数字信号处理中,溢出误差的主要来源是什么?A. 采样频率B. 量化位数C. 信号幅度D. 信号频率52. 下列哪种调制技术可以实现较高的数据传输速率?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制53. 在信号处理中,滤波器类型选择的主要依据是什么?A. 信号的平滑处理B. 信号的频谱分析C. 信号的时域分析D. 信号的滤波54. 下列哪种技术可以用于信号的非线性增强?A. 傅里叶变换B. 小波变换C. 自适应滤波D. 神经网络55. 在数字通信系统中,信道带宽与数据速率的关系是什么?A. 信道带宽总是等于数据速率B. 信道带宽总是大于数据速率C. 信道带宽总是小于数据速率D. 信道带宽与数据速率没有直接关系56. 下列哪种调制技术可以实现较高的频谱利用率?A. 幅度调制B. 频率调制C. 相位调制D. 正交幅度调制57. 在信号处理中,周期噪声的特性是什么?A. 频谱均匀分布B. 频谱非均匀分布C. 频谱随时间变化D. 频谱随频率变化58. 下列哪种技术可以用于信号的降噪?A. 低通滤波B. 高通滤波C. 带通滤波D. 带阻滤波59. 在数字信号处理中,重构的主要作用是什么?A. 保证信号的完整性B. 保证信号的连续性C. 防止信号的混叠D. 提高信号的分辨率60. 下列哪种滤波器可以用于图像处理中的纹理分析?A. 低通滤波器B. 高通滤波器C. 带通滤波器D. 带阻滤波器1. C2. C3. C4. D5. D6. D7. B8. D9. A10. A11. C12. B13. C14. B15. B16. B17. B18. B19. A20. D21. B22. B23. D24. A25. C26. B27. C28. D29. D30. D31. D32. D33. B34. A35. D36. B37. C38. B39. B40. D41. D42. C43. D44. D45. B46. B47. D48. B49. C51. C52. D53. D54. D55. D56. D57. D58. A59. D60. C。
电子科技大学研究生试卷(考试时间: 19:00 至 21:00 ,共 2小时)课程名称 自适应信号处理 教师 李会勇、胡进峰 学时 40 学分 2 教学方式 考核日期 2012 年 4 月 23日 成绩 考核方式: (学生填写)一、(15分)对于题图1的滤波器,要由∑=+-=Mi i i n x w n y 1*)1()(估计需要信号d(n ),令[]11T(n )x(n ),x(n ),...,x(n M )=--+x ,TM w w w ],...,,[21=w(1) 给出递推求解最佳权opt w 的LMS 算法、RLS 算法的递推公式; (2) 比较LMS 算法和RLS 算法的优缺点;(3) 给出LMS 算法和RLS 算法的一次递推的运算量。
题图1二、(15分)时域自适应滤波与空域自适应滤波有何区别和联系?时域滤波器中如果改变延时单元间隔T 以及空域滤波器中改变阵元间隔d 会对算法性能产生何种影响? 三、(15分)已知阵列接收信号为其中包含噪声和干扰信号。
考虑在多个线性约束条件下的信干噪比极大化问题:学 号 姓 名 学 院……………………密……………封……………线……………以……………内……………答……………题……………无……………效……………………其中,是空域滤波器权向量,是干扰和噪声分量的相关矩阵,和分别是约束矩阵和约束相应向量,其中包含约束条件(1) 试证明:最优权向量为(2)给出空域滤波器权向量取值时,信干噪比的极大值。
四、(20分) 阵列处理器由一个基本传感器和参考传感器相连组成。
参考传感器的输出经过加权,然后从基本传感器中减去。
证明当权值达到其最优值足时阵列处理器输出的均方值达到最小值。
其中,和分别代表时刻基本传感器和参考传感器的输出。
五、(20分)对于题图5的均匀线阵,其加权矢量为TM w w ],,[1 =w (1)求阵的波束图的表达式并分析影响波束图主瓣宽度的因素; (2)使阵波束的最大方向指向030θ=对应的加权矢量;(3)求在保持0θθ=阵输出为常数f 的条件下使输出功率{}2out P E y=最小的最佳权opt w 及相应的最小输出功率out min P -。
k
ε2006年研究生自适应信号处理考试题
1. 简述人工自适应系统的特点和建立自适应系统一般应该满足的要求。
(10%) 特点:随时间变化,针对变化的环境自我优化,能通过训练适应变化的任务,自我设计、修复,少量训练可以改变整个系统的结构,输入的变化可能影响系统的性能,系统的调节都针对特定的优化目标。
构造自适应系统,一般有两种形式,一种是开环系统,另一种是闭环系统。
无论那种形式,系统的处理器都必须是可调节的。
2. 一个滤波器的特性函数为()2
115726
w ξ=-+,根据特征曲面搜索的最速下降法和牛
顿法,试分别写出其参数w 的调整算法。
(15%)
()()()2
111115726
7
571349
13
577()7
5713
k k k k k k k k
k k k w w w w w w
w w w w w w w w w w w w ξξξξξμμ+++=-+'+'''=-
''+=-
=+-∇=-+解:
牛顿法:() ()=
()=()
() w 调整算法最速下降法:
3. 设线性组合器110-+=k k k x w x w y ,画出它的原理图;当输入信号为
52sin
k x k π=,期望输出信号为5
2cos 2k
d k π=时,求出自相关矩阵R ,互相关矩阵P ,特性函数,梯度和最佳权值。
(20%)
原理图:
[]
k 2
k 12
k-1k-12T T
k 20.5 0.5cos x x 5
R=E 2x x 0.5cos 0.5
52P=E 5=E[d ]+W RW-2P W
=2+0.5[k k T
T
x x πππξ-⎡
⎤
⎢⎥⎡⎤=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣
⎦
⎡
⎤=⎢⎥⎣⎦
k k k-1k-1解:自相关矩阵 互相关矩阵d x d x 0 -sin
特性函数0001112
20101121 cos 25 ]225cos 1
522=cos 2sin 2
55
=20.5 0.5cos 520.5cos 0.55πωωπωωπωωππωωωωωππ⎡
⎤⎢⎥⎡⎤
⎡⎤⎡⎤-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦
++∇⎡
⎤⎢⎥⎢⎥⎢⎢⎣⎦
0 -sin 0.5(+)+ 梯度2RW-2P
=201010
1*252+cos 5
22cos ++2sin 5522W 55
ωπωπωωππωωππ
⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎥⎣⎦⎢⎥⎣⎦⎥⎡⎤
⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦
T 0 -2-sin =
最佳权值=[2cot -2csc ]
4. 设滤波器的自相关矩阵为300021018R ⎛⎫ ⎪= ⎪ ⎪⎝⎭,摄动为125P ⎛⎫ ⎪
= ⎪ ⎪⎝⎭
,写出最速下降法
的权值调整算法,给出它们的收敛条件。
(10%)
*-1(2)2=(2)2R P =(2)2P
1003001 =(010-2021)2200101853
00I-R 0021(3)018k k k k I R W RW I R W R I R W W μμμμμμμμλλλλλ=-+-+-+⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪
+ ⎪ ⎪ ⎪
⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭
-⎛⎫ ⎪=⇒--=- ⎪
⎪--⎝⎭k+1解:最速下降法:
W
2
111max
*-11
(1015)03,551
00(12)2(12)2R P
3001 =(12)202120185k k k W W W W λλλλλμμλμμμμμμμ--+=⇒==+=<<
⇒<<
=-+=-+⎛⎫⎛⎫
⎪ ⎪
-+ ⎪ ⎪
⎪ ⎪⎝⎭⎝⎭
k+1收敛条件:牛顿法:W (化简)收敛条件:0<<1
5. 写出第4题相应的LMS 算法,指出收敛条件,求失调M ,试以此题为例阐
明LMS 算法的收敛速度与失调之间的关系。
(10%) 1min
LMS :221
0[]32813[]1
013
M []131
4[]
M k k k k k T k k k k k mse W W X W d X X W X tr R tr R excessMSE
tr R L tr R L μεμμμμμμξτμμμ+=++<<
=++=<<
≈=+≈
+≈解:
算法
=-2 收敛条件:由 失调=学习曲线时间常数:由上可知失调与自适应增益常数成正比,而学习曲线时间常数与成反比。
同时可得:1
4mse
τ。
6. 在下面的滤波器中
功率谱()1=Φz xx ,求功率谱()z dx Φ和特性函数。
(10%) 解:
1
1222
12
200112
011002
111
()[(10.2)()]1()10.2211
[2(10.2)]211[2(10.2)]11dx xx z z dd z z z z dz
z z z j
z
z z dz z z j z z z z z φφφπωωξπωωωωωωωωωω---←--=++=++++-++--++-+++-+⎰
⎰ 首先 =1+0.2z+z 又由 =2.04特征函数:=2.04+
=2.04+ =2.04+2010
1102
1
22[1(0.2)()]1ωωωωωωω+-+++-
7.已知滤波器的传递函数为()123
123
0.20.180.410.40.180.2z z z H z z z z -------+++=++-,写出它对应的
格型滤波器,作原理图。
(15%)
e k
解:
()()123
1233
0312*******.20.180.410.40.180.2()
()()()L 3.Y(Z)=X(Z)()
()0.20.180.4()10.40.180.2.L L l l
l z z z H z z z z A z Y z H z X z B z v B z A z z z z B z z z z ------=-------+++=
++-==
=-+++=++-∑由上可知,=zC (z)
因为,下面计算格型的基本单元。
由题目知: 又由: 1000111111112103210323,,.()()[()][()]0.20.180.4.10.4,0.18,0.2.()0.40.18l ll l ll l l l l l l l l b v a v a z B z k z zC z k z zC z v v v v zC z z z z ------------====-=-======-=++ k B zC (z)=B (z)+ 则:
k ,k ,k , 12121112
212
10.2.0.960.4360.26
().
0.96
()0.4.
0.960.4360.26().
0.96
0.960.25520.0872().
0.96
[]
z z zC z zC z z z z z z z z --------++==+++=-+= B B 上述计算需重新审查原理图可见8.6格型结构图8.11。
8.试阐述学过的自适应信号处理方法在你自己的研究方向上的某些应用。
(10%)。