基于神经网络的模糊控制算法
- 格式:docx
- 大小:37.50 KB
- 文档页数:2

控制系统中的自适应模糊神经网络控制算法研究一、引言控制系统在工程领域中扮演着至关重要的角色。
随着技术的不断发展,人们对于控制系统的性能和效果的要求也越来越高。
为了提高控制系统的稳定性、精确性和适应性,自适应模糊神经网络控制算法应运而生。
本文旨在研究探讨控制系统中的自适应模糊神经网络控制算法。
二、自适应模糊神经网络控制算法的原理自适应模糊神经网络控制算法是一种基于模糊控制和神经网络的控制算法。
它通过对控制系统输入和输出的模糊化处理,建立模糊规则库,并利用神经网络的学习能力,通过不断调整神经网络参数来优化控制系统的性能。
三、自适应模糊神经网络控制算法的实现步骤1. 数据预处理:将控制系统的输入和输出数据进行归一化处理,消除数据间的量纲影响,使其具有相同的范围。
2. 模糊化处理:将预处理后的输入和输出数据通过模糊化方法转换为模糊集合,建立模糊规则库。
模糊化处理的关键是选择合适的隶属函数和模糊化算法。
3. 神经网络学习:将模糊规则库作为训练数据,通过神经网络的学习算法优化神经网络的权重和偏置。
常用的神经网络学习算法有误差逆传播算法和遗传算法。
4. 控制输出计算:将模糊规则库和神经网络的输出结合起来,通过解模糊化方法计算最终的控制输出。
5. 参数调整:根据控制系统的性能指标,通过反馈机制不断调整模糊规则库和神经网络的参数,以提高控制系统的性能。
四、自适应模糊神经网络控制算法的优势1. 适应性强:自适应模糊神经网络控制算法能够根据控制系统的工作状态和环境变化自动调整参数,具有较强的适应性。
2. 鲁棒性好:由于模糊规则库的建立和神经网络的学习算法,自适应模糊神经网络控制算法具有较好的鲁棒性,能够应对各种复杂的干扰和系统变化。
3. 精度高:通过优化神经网络的权重和模糊规则库的参数,自适应模糊神经网络控制算法能够提高控制系统的输出精度,实现更精确的控制效果。
五、自适应模糊神经网络控制算法的应用展望自适应模糊神经网络控制算法已广泛应用于各个领域的控制系统中,如机械控制系统、电力系统、交通系统等。

基于BP算法的模糊神经网络控制系统的仿真实现随着计算机和控制技术的不断发展,控制系统的设计也越来越受到关注。
基于BP算法的模糊神经网络控制系统是一种新型的控制方法,可以有效解决传统控制方法难以解决的问题。
在本篇文章中,我们将介绍基于BP算法的模糊神经网络控制系统的仿真实现。
1. BP算法简介BP算法是一种常见的人工神经网络训练算法,它是一种迭代算法,通过不断调整权值来实现网络的训练。
BP算法的基本思想是利用梯度下降求出网络误差函数的最小值。
在模糊神经网络中,BP算法可以用于训练输入输出关系的映射。
通过训练可以得到网络的权值和阈值,使得网络能够更好地拟合输入输出映射。
2. 模糊神经网络控制系统模糊神经网络控制系统是一种强大的控制方法,它将模糊控制和神经网络控制相结合,能够有效地处理模糊性问题和非线性问题。
模糊神经网络控制系统将模糊控制器和神经网络控制器相结合,用模糊控制器处理模糊性问题,用神经网络控制器处理非线性问题。
3. 仿真实现在仿真实现中,我们以飞行控制系统为例,设计了一个基于BP算法的模糊神经网络控制系统,该系统包含一个模糊控制器和一个BP神经网络控制器。
模糊控制器将输入的误差和误差变化率转化为模糊量,然后根据模糊规则得到输出控制量。
BP神经网络控制器通过训练得到输入输出映射,进而对输出控制量进行优化。
我们通过MATLAB软件进行仿真,将仿真结果与经典控制方法进行对比,发现基于BP算法的模糊神经网络控制系统具有更好的控制性能和更强的鲁棒性。
在控制飞行器的姿态过程中,基于BP算法的模糊神经网络控制系统具有更快的响应速度和更小的稳态误差。
4. 总结基于BP算法的模糊神经网络控制系统是一种强大的控制方法,能够有效地解决传统控制方法难以解决的问题。
在仿真实现中,我们设计了一个基于BP算法的模糊神经网络控制系统,得到了良好的控制效果,这也表明了该方法的可行性和优越性。
在实际应用中,我们需要对系统进行优化和调试,以达到更好的控制效果。

模糊控制与神经网络控制模糊控制和神经网络控制是现代控制领域中的两个重要研究方向,它们通过不同的方法和理论来解决复杂系统的控制问题。
本文将就这两种控制方法进行介绍和对比,并探讨它们在实际应用中的优劣势。
一、模糊控制模糊控制是一种基于模糊逻辑理论的控制方法,它通过将输入和输出之间的关系进行模糊化来实现系统的控制。
模糊控制器的设计通常包括模糊化、规则库的建立、推理机制以及解模糊化等步骤。
在模糊控制中,输入和输出以模糊集形式表示,通过一系列的模糊规则进行推理得到控制信号。
模糊规则库中存储了专家知识,根据实际问题的需求可以设计不同的规则。
推理机制使用模糊规则进行推理,最后通过解模糊化将模糊输出转化为具体的控制量。
模糊控制的优点之一是适用于非线性和不确定性系统,它能够通过模糊化处理来处理实际系统中的不确定性和模糊性。
此外,模糊控制能够利用专家经验进行控制器的设计,无需准确的系统数学模型。
然而,模糊控制也存在一些局限性。
首先,模糊控制的规则库和参数通常需要由专家进行手动设计,这对专家的经验和知识有一定的要求。
其次,模糊控制的性能也会受到模糊规则的数量和质量的影响,如果规则库设计不当,控制性能可能无法满足要求。
二、神经网络控制神经网络控制是一种基于人工神经网络的控制方法,它通过将系统模型表示为神经网络结构来实现控制。
神经网络是一种模仿生物神经系统结构和功能的计算模型,具有自适应学习和适应性处理的能力。
在神经网络控制中,神经网络被用作控制器来学习系统的映射关系。
通过输入和输出的样本数据,神经网络根据误差信号不断调整权重和阈值,使得输出逼近于期望输出。
神经网络控制通常包括网络的结构设计、学习算法的选择和参数调整等步骤。
与模糊控制相比,神经网络控制具有更好的自适应性和学习能力。
它能够通过学习过程来建立系统的非线性映射关系,并且对于未知系统具有较好的鲁棒性。
此外,神经网络控制不需要准确的系统模型,对系统的数学模型要求相对较低。

基于神经网络的模糊控制系统设计与实现随着科技的不断发展,应用人工智能技术来解决问题已经成为趋势。
其中,神经网络和模糊控制系统是两个比较常用的技术,二者结合起来也是很有前途的。
一、神经网络神经网络是模拟人类神经系统的一种计算模型。
它由许多简单的神经元组成,这些神经元之间通过连接进行信息传递,从而实现了模式识别、分类、回归等功能。
通俗地说,就是让计算机模拟人脑的思维方式。
神经网络有很多种结构和算法,其中比较常用的是多层感知机(Multi-layer Perceptron,MLP)。
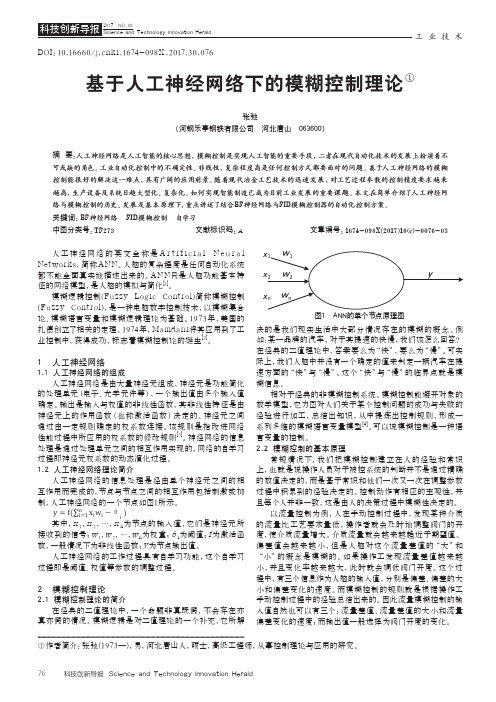
MLP是一种前向反馈神经网络,由输入层、隐藏层和输出层组成,如图1所示。
图1 MLP网络结构示意图其中,输入层和输出层很好理解,而隐藏层则是用来处理输入与输出之间的关系,其中每个神经元计算的结果会被传递给下一层。
MLP是一种有监督学习算法,即需要给定训练集和对应的目标输出,通过反向传播算法来训练神经网络,不断调整权重和偏置,从而减小预测输出与真实输出之间的误差。
在训练完成以后,神经网络可以用来进行预测,从而实现分类、预测等任务。
二、模糊控制系统模糊控制系统是一种基于模糊数学理论的控制系统。
不同于传统控制系统中的明确的控制规则和精确的数学模型,模糊控制系统通过模糊集合、模糊逻辑来处理模糊信息,从而实现控制目标。
通俗地说,就是将现实世界中的模糊概念映射到数学空间中,通过对模糊概念的描述和处理来实现控制。
例如,温度控制系统可以被描述为“当室内温度较低时,加热器应该加热;当室内温度较高时,加热器应该停止加热”这样一个模糊规则库,从而实现对室内温度的控制。
模糊控制系统有很多算法和方法,其中最常用的是基于 Mamdani 模型的模糊控制系统。
Mamdani 模型将输入变量和输出变量用模糊集合来描述,通过一系列的 IF-THEN 规则来实现模糊控制,具体结构如图2所示。
图2 Mamdani 模糊控制系统结构示意图其中,输入变量被映射到它们各自的模糊集合上,每个输入变量都有自己的隶属函数来描述模糊集合的特征。

基于神经网络的模糊控制器设计与应用近年来,人工智能技术的快速发展,尤其是深度学习技术的兴起,让我们在解决复杂问题时找到了新的方法和思路。
神经网络作为一种重要的深度学习模型,已经被广泛应用于各个领域。
其中,基于神经网络的模糊控制器在控制领域中也得到了广泛的应用。
模糊控制是一种非精确控制法,其主要思想是利用模糊集合运算来处理模糊信息,从而实现对控制对象的粗略控制。
而基于神经网络的模糊控制则是将神经网络和模糊控制相结合,利用神经网络的自适应性和模糊控制的模糊化处理能力,来提高应对复杂控制系统的能力。
在基于神经网络的模糊控制中,神经网络部分主要负责对输入信号的特征提取和预测输出的模糊化处理,而模糊控制部分则负责将模糊输出信号转换为确定性控制信号。
神经网络可以通过训练来学习输入与输出之间的复杂映射关系,从而实现对复杂控制系统的自适应控制。
而模糊控制则利用模糊逻辑的方法来处理输入信号,并将输出信号转化为控制信号。
这种结合的方式使得基于神经网络的模糊控制方法具有了更强的鲁棒性和适应性。
在实际应用中,基于神经网络的模糊控制技术已经被广泛应用于各种领域。
例如,在机器人控制领域,基于神经网络的模糊控制技术已经被用于控制移动机器人的运动,实现了对机器人的高效控制。
同时,它还被应用于工业自动化生产线、电力系统、汽车控制系统等领域。
除此之外,基于神经网络的模糊控制技术还可以应用在飞行控制系统中。
飞行控制系统是一种非常复杂的控制系统,需要对各种信号进行处理和控制,同时还需要考虑到旋翼动力学、空气动力学等因素。
基于神经网络的模糊控制技术可以利用其强大的自适应性,根据输入的实时数据调整控制参数,从而实现对复杂飞行控制系统的高效控制。
总体来说,基于神经网络的模糊控制技术已经成为了现代控制领域的热门技术之一。
其神经网络部分可以对输入信号进行自适应处理,而模糊控制部分则可以将模糊输出信号转换为确定性控制信号,从而实现对复杂控制系统的高效控制。
工业技术科技创新导报 Science and Technology Innovation Herald76DOI:10.16660/ki.1674-098X.2017.30.076基于人工神经网络下的模糊控制理论①张弛(河钢乐亭钢铁有限公司 河北唐山 063600)摘 要:人工神经网络是人工智能的核心思想,模糊控制是实现人工智能的重要手段,二者在现代自动化技术的发展上扮演着不可或缺的角色。
工业自动化控制中的不确定性、非线性,复杂程度高是任何控制方式都要面对的问题。
基于人工神经网络的模糊控制能很好的解决这一难点,具有广阔的应用前景。
随着现代冶金工艺技术的迅速发展,对工艺过程参数的控制精度要求越来越高,生产设备及系统日趋大型化、复杂化。
如何实现智能制造已成为目前工业发展的重要课题。
本文在简单介绍了人工神经网络与模糊控制的历史、发展及基本原理下,重点讲述了结合BP神经网络与PID模糊控制器的自动化控制方案。
关键词:BP神经网络 PID模糊控制 自学习中图分类号:TP273 文献标识码:A 文章编号:1674-098X(2017)10(c)-0076-03①作者简介:张弛(1973—),男,河北唐山人,硕士,高级工程师,从事控制理论与应用的研究。
人工神经网络的英文全称是A r t i f i c i a l N e u r a l Networks,简称ANN。
人脑的复杂程度是任何自动化系统都不能全面真实地描述出来的。
ANN只是人脑功能基本特征的网络模型,是人脑的模拟与简化[1]。
模糊逻辑控制(Fuzz y Logic Control)简称模糊控制(Fuzz y Control),是一种电脑数字控制技术,以模糊集合论、模糊语言变量和模糊逻辑理论为基础。
1973年,美国的扎德创立了相关的定理。
1974年,Mamdani将其应用到了工业控制中,获得成功,标志着模糊控制论的诞生[2]。
1 人工神经网络1.1 人工神经网络的组成人工神经网络是由大量神经元组成,神经元是功能简化的处理单元(电子、光学元件等),一个输出值由多个输入值确定。
工业控制中必备的算法大全一、PID控制算法PID控制算法是最常用的一种工业控制算法,它是一种反馈控制算法,通过对被控制系统的测量值与期望值之间的差值进行比较,按照比例、积分和微分的系数来调整控制器的输出,使被控制系统稳定在设定的目标状态。
PID控制算法可以适用于各种各样的控制系统,包括温度、压力、流量、位置等控制系统。
二、模糊控制算法模糊控制算法是基于模糊逻辑的一种控制算法,与PID算法相比,模糊控制算法更适用于复杂的非线性系统控制。
模糊控制算法通过将输入变量与输出变量之间的关系表示为模糊规则,利用模糊推理引擎来控制被控制系统。
和PID控制算法相比,模糊控制算法更加适用于大量输入变量和复杂的非线性系统。
三、神经网络控制算法神经网络控制算法是基于神经网络理论的一种控制算法,它可以自适应地调节系统的控制参数。
神经网络控制算法可以根据过去的测量数据和控制输出值来自适应地调整神经网络的权重和阈值,以满足控制系统的要求。
神经网络控制算法可以适用于非线性、时变、参数变化等具有复杂动态性的工业控制系统。
四、遗传算法遗传算法是一种优化算法,可以用来解决复杂优化问题。
在工业控制中,遗传算法可以用来寻找最佳的控制参数。
遗传算法通过模拟自然界的进化过程来搜索最优解。
遗传算法将控制参数看做是染色体上的基因,通过交叉、突变等基因操作来生成新的染色体,逐步优化控制参数,直至得到最优解。
五、模型预测控制算法模型预测控制算法是一种基于模型的控制算法,它通过建立被控制系统的数学模型,预测未来的状态,并根据预测结果来生成控制信号。
模型预测控制算法能够适用于复杂的非线性系统,但需要建立准确的数学模型。
【结论】在工业控制中,PID控制算法是最为常用的控制算法,但是针对一些非线性、复杂的系统,模糊控制、神经网络控制、遗传算法和模型预测控制等算法也逐渐得到广泛应用,提高了工业控制技术的精度和效率。
基于模糊神经网络的温度控制系统设计随着温度控制技术的发展,温度控制系统的精确性和可靠性已经被广泛应用于各个行业,从汽车制造业到化学工艺,从冶金到电子工程,温度控制系统已经成为维护各类工艺技术的基础设施。
由于这种应用的重要性,对温度控制系统进行研究和改进一直都是众多研究者感兴趣的领域,模糊神经网络(FNN)为改进温度控制系统提供了新的思路。
一、温度控制的基本原理温度控制是一种控制现象,涉及被控对象的温度反馈系统,这是一个“输入-输出”模型,它指的是系统的输入和输出的关系,在工业中应用温度控制,该模型由输入和输出环节组成。
输入部分称为控制律,它是一种控制量,用来确定控制系统输出的变化;而输出则为实际控制值,它指示被控对象的状态,如温度和压力。
二、模糊神经网络在温度控制系统中的应用模糊神经网络(FNN)是一种模糊控制理论中的神经网络结构,它通过模糊推理算法来解决模糊逻辑问题,具有自适应性和决策性,多次引用系统的非线性性质,能够对被控对象的各种状态进行有效控制,因此,模糊神经网络在温度控制系统中被广泛应用。
模糊控制器采用模糊规则定义规则,并且可以根据系统状态更新规则,使用自适应技术来跟踪变化的状态,而模糊神经网络则利用神经网络的技术,对模糊控制器的表现进行评价,使其具有自适应性和可调节性,从而提高温度控制的精度和准确性。
三、基于模糊神经网络的温度控制系统设计基于模糊神经网络的温度控制系统主要分为数据处理部分、模糊决策部分和控制决策部分。
首先,采用控制对象的反馈信号作为输入,输入到温度控制系统中,然后进行数据处理,将实时温度信号转换为规定的模糊变量,再利用模糊推理算法,根据模糊变量决定出控制变量,最后进行参数估计和控制决策,从而实现对控制对象的温度控制。
四、基于模糊神经网络的温度控制优势(1)模糊神经网络的自适应性强,采用模糊规则建立模糊控制器,可以根据实际系统状态自动调整控制量,使之自动适应环境的变化,从而实现控制的准确性和精确性;(2)模糊神经网络在模糊控制器的基础上,引入神经网络技术,使其具有仿生学上一种行为,具有可调节性和反馈性,能够对不确定的控制对象有效控制,提高温度控制的精度和准确性;(3)模糊神经网络的实现比较简单,因为采用的是模板匹配算法,不需要考虑系统的模型参数,只需要调整模板变量即可,使温度控制系统设计变得非常容易和快捷。
机电传动控制系统中的模糊控制算法优化研究随着现代科技的不断发展,机电传动控制系统在工业生产和自动化领域中的应用越来越广泛。
而在机电传动控制系统中,控制算法的优化是提高系统性能和稳定性的关键因素之一。
本文将围绕机电传动控制系统中的模糊控制算法进行优化研究,旨在提出可行的优化方法和算法,提高机电传动控制系统的性能。
一、模糊控制算法的基本原理模糊控制算法是一种应用于非线性系统的控制方法,在机电传动控制系统中具有广泛的应用。
其基本理念是通过模糊逻辑推理来实现对系统的控制。
模糊控制算法利用模糊集合理论的思想,将输入和输出之间的模糊关系进行建模和描述,然后根据模糊规则进行推理,得到控制指令。
二、模糊控制算法的优化需要尽管模糊控制算法在机电传动控制系统中表现出优秀的性能,但仍然存在一些问题需要解决。
首先,由于模糊控制算法的设计具有一定的主观性,人工经验往往在其中起到决定性作用,导致算法的稳定性和可靠性难以保证。
其次,传统的模糊控制算法往往存在计算复杂度高和运算速度慢的问题,不能适应实时控制的需求。
因此,优化模糊控制算法的研究势在必行。
三、基于遗传算法的模糊控制算法优化遗传算法是一种模拟自然界生物进化过程的优化算法,在解决复杂优化问题上具有优越性。
基于遗传算法的模糊控制算法优化正是将遗传算法与模糊控制相结合,通过优化模糊控制算法的参数和规则,提高系统的控制性能。
在基于遗传算法的模糊控制算法优化中,首先需要将模糊控制的参数和规则进行编码,然后通过遗传算法进行种群的初始化和进化操作。
在种群进化的过程中,通过交叉、变异等操作,不断地优化模糊控制算法的参数和规则。
最后,根据遗传算法进化得到的最优解,重新设计和优化模糊控制算法。
四、基于模糊神经网络的模糊控制算法优化模糊神经网络结合了模糊逻辑和神经网络的优点,可以更好地解决非线性系统的控制问题。
基于模糊神经网络的模糊控制算法优化是将模糊神经网络应用于模糊控制的算法优化过程中,通过神经网络的学习能力和自适应性,提高模糊控制系统的性能。
基于BP神经网络的模糊PID控制器的设计【摘要】工业过程控制中广泛采用PID控制,但传统PID控制因其控制参数的固定,在线整定难等问题。
为此本文研究了一种新的自适应模糊PID控制方法,为了解决模糊推理没有学习能力的问题,本文又提出了一种基于BP神经网络的自适应模糊控制方法。
此方法是模糊控制、神经网络和PID控制的有效结合。
仿真实验表明,这种基于BP神经网络的模糊PID控制算法具有良好的控制效果。
【关键词】PID控制;BP神经网络;模糊PID控制Abstruct:PID control are widely used in industrial process control,but the traditional PID control because of its control parameters are fixed,and it is difficult to adjust its parameters online.So this paper studies a new adaptive fuzzy PID control method,to solve problem without the ability to learn,and put forward a kind of adaptive fuzzy control method based on BP neural network in this paper.It is the effective combination of fuzzy control,neural network and PID control.Simulation results show that this fuzzy PID control method based on BP neural network has good control effect.Keywords:PID control;BP neural network;Fuzzy PID control1.引言常规PID在控制领域被广泛应用,利用数学算法来整定参数。
基于神经网络的模糊控制算法
随着人工智能技术的发展,神经网络在自然语言处理、图像识别、机器翻译等
领域扮演着越来越重要的角色。
而在控制系统的设计中,神经网络也有着广泛的应用,其中基于神经网络的模糊控制算法尤为重要。
基于神经网络的模糊控制算法的基本原理
模糊控制是一种基于模糊逻辑的控制策略,其主要优点是可以处理一些难以精
确建模的系统,例如非线性、时变的系统。
神经网络作为一种强大的函数逼近工具,可以帮助模糊控制器更好地处理这些系统。
基于神经网络的模糊控制算法包括以下几个方面。
首先,我们需要建立一个模糊控制器。
在传统的模糊控制器中,我们需要设置
一组人工设计的模糊规则,这些规则会告诉我们在不同的输入变量下应该采取什么样的控制动作。
在基于神经网络的模糊控制器中,我们用神经网络来拟合这些模糊规则。
这就意味着我们不再需要手工设计规则,而是让神经网络自动学习它们。
这种方法通常比传统的模糊控制器更具有灵活性和适应性。
其次,我们需要想办法合理地融合模糊控制器和神经网络。
一种简单的方法是
将神经网络作为模糊控制器的输出调整器。
具体来说,我们首先计算出神经网络的输出,然后将其加权平均,得到最终的控制信号。
这个加权平均的权重可以由模糊控制器的输出决定。
另一种方法是将神经网络嵌入到模糊控制器之中。
具体来说,我们可以将神经网络的隐藏层输出作为模糊控制器的输入,然后将两者的输出进行简单的融合。
这种方法通常需要更多的计算资源,但往往能够获得更好的控制效果。
最后,我们需要使用一些优化算法来训练神经网络。
在模糊控制系统中,最常
用的优化算法是基于误差反向传播的神经网络训练算法。
该算法通过计算神经网络在训练数据上的误差和权重梯度,从而更新神经网络的权重参数。
为了使优化结果
更加稳健、可靠,我们通常会采用一些技巧,例如批量训练、权重衰减、学习率衰减等。
基于神经网络的模糊控制算法的应用场景
基于神经网络的模糊控制算法可以应用于各种各样的控制系统中。
以下是一些典型的应用场景。
首先是机器人控制。
机器人是一种典型的非线性、时变的系统,常常需要采用模糊控制方法来规划其运动轨迹。
而神经网络可以帮助我们更好地建立机器人的控制模型,并且具有良好的鲁棒性和适应性。
其次是飞行器控制。
飞行器的控制需要考虑到很多复杂的因素,例如空气动力学、质量分布等。
传统的PID控制方法往往难以适应这些变化,而基于神经网络的模糊控制方法可以更好地解决这些问题。
另外,基于神经网络的模糊控制方法也可以应用于工业控制、智能交通、自动化领域等各种场景中。
只要遇到需要处理非线性、时变、不确定性等高度复杂的问题时,我们就可以考虑使用这种方法。
结语
基于神经网络的模糊控制算法是一种强大的控制方法,它将模糊控制和神经网络两种技术有效地结合在了一起。
随着人工智能技术的普及,我们相信这种方法将会在越来越多的领域得到应用。