一种改进的均值滤波算法
- 格式:pdf
- 大小:587.45 KB
- 文档页数:4
均值滤波原理均值滤波器是一种常用的图像处理技术,通过对图像中像素的邻域进行计算,然后用计算得到的平均值来代替原图像中的像素值,从而达到平滑图像的效果。
均值滤波器的原理是基于图像中局部区域像素的相似性。
通过计算像素邻域的灰度平均值来替代原像素值,以减弱图像中的噪声。
在均值滤波中,每个像素的新值是其周围像素的平均值。
这样,较突出的细节将被平滑处理,使图像变得更加柔和。
均值滤波器使用的是一个均值模板,模板的大小可以根据需要进行调整。
常见的均值滤波器模板有3x3、5x5、7x7等,该模板在图像中滑动,对每个模板的像素进行计算和处理。
对于中心像素,统计其附近像素的平均灰度值,并将该平均灰度值赋给中心像素。
均值滤波器的处理过程可以简单地理解为将一个模板覆盖在图像上,模板中的每个像素对应着图像中的一个像素。
然后,对应位置的像素值进行求和,并除以模板中像素的总数,得到平均值。
将计算得到的平均值作为对应位置的像素值。
均值滤波器的优点是简单易实现,计算速度快。
然而,均值滤波器也存在一些缺点。
首先,均值滤波器会平滑图像中的边缘信息,导致图像的细节丢失。
其次,均值滤波器对于椒盐噪声等离群点的处理效果不佳,容易出现图像中个别像素值异常的情况。
为了解决这些问题,可以采用改进的均值滤波算法。
其中一个常用的改进算法是自适应均值滤波器。
该算法在计算像素平均值时加入了动态的权重调整,根据像素间的灰度差异决定采用不同的权重。
这样可以更好地保留图像的边缘信息,并有效抑制噪声。
另一个改进算法是中值滤波器。
中值滤波器在模板中求取像素值的中值作为对应像素的值。
不像均值滤波器对像素值进行求和取平均,中值滤波器通过选择中间值来平滑图像,因此可以更好地保留图像细节。
尤其对于存在椒盐噪声的图像,中值滤波器表现良好。
总之,均值滤波器是一种有效的图像处理技术,它通过计算像素周围邻域的平均值,将该平均值代替原像素值,从而平滑图像。
虽然均值滤波器处理简单,但容易丢失图像中的细节和边缘信息。
中值和均值滤波算法中值滤波和均值滤波是常用的图像处理算法,用于降低图像噪声的影响。
它们都属于非线性滤波算法,即输出像素值不仅取决于输入像素值,还取决于输入像素值周围的像素值。
中值滤波算法通过将像素值排序并选择中间值作为输出值来实现图像平滑。
具体步骤如下:1.对于图像中的每个像素点,确定一个窗口大小,该窗口覆盖了该像素点及其邻域像素点。
2.将这些像素值排序,并选择排序后的中间值作为输出像素值。
3.重复上述步骤,直到对所有像素点进行操作。
中值滤波算法的优点是可以有效地去除椒盐噪声等脉冲噪声,但会对图像的细节进行模糊处理,从而使图像失去一些细节信息。
均值滤波算法则是将窗口内所有像素值的平均值作为输出像素值。
具体步骤如下:1.对于图像中的每个像素点,确定一个窗口大小。
2.将窗口内所有像素值求和,并除以窗口中像素点的数量,得到均值作为输出像素值。
3.重复上述步骤,直到对所有像素点进行操作。
均值滤波算法的优点是能够在平滑图像的同时保留图像的细节信息,但对于噪声的去除效果相对较差。
在中值滤波和均值滤波算法中,窗口大小是一个重要的参数。
较小的窗口大小可较好地保留图像的细节信息,但噪声去除效果相对较差;而较大的窗口大小可以更好地去除噪声,但会导致图像模糊。
中值滤波和均值滤波算法都有一些改进方法。
例如,自适应中值滤波算法可以根据像素值的分布动态调整窗口大小,从而更好地去除噪声。
另外,加权平均滤波算法可以根据像素点的重要性赋予不同的权重,从而更好地平衡去噪和保留细节的效果。
总之,中值滤波和均值滤波是两种常用的图像处理算法,可以有效地去除噪声,平滑图像。
选择哪种算法取决于具体的应用场景和需求。
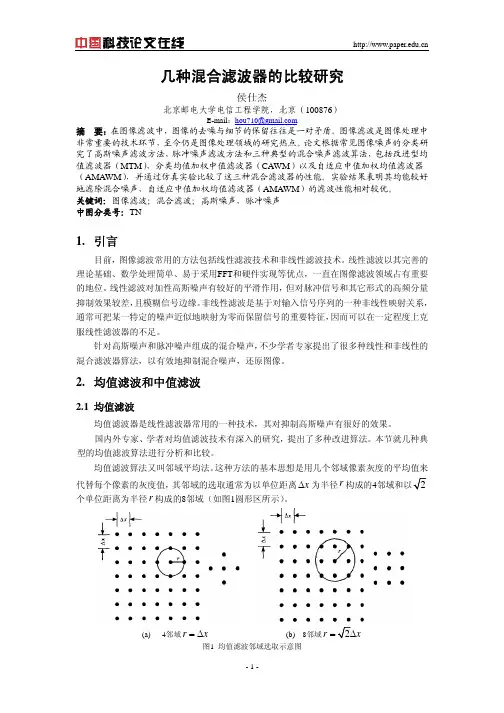
收稿日期22 修改日期22作者简介武英,女,南京晓庄学院物理与电子工程学院讲师,硕士,研究方向影像处理2008年11月第6期南京晓庄学院学报JOURNAL OF NANJ I NG X I A OZ HUANG U N I V ERS ITY Nov .2008No .6一种有效去除椒盐噪声的滤波算法武 英(南京晓庄学院物理与电子工程学院,江苏南京210017)摘 要:文章在已有极值中值滤波算法的基础上,提出一种改进的滤波算法.该算法对于不同密度的椒盐噪声采用了不同的滤波方法.在噪声密度较低时,采用有效信号的均值滤波;在噪声密度较大时,采用递归方式进行滤波.经过大量实验证明,该算法在滤除椒盐噪声能力和细节保护能力方面均有较大提高.关键词:椒盐噪声;极值检测;均值滤波;递归中图分类号:O422 文献标识码:A 文章编号:100927902(2008)06200622040 引言图像在传输和形成过程中会由于噪声的产生而导致图像质量下降,而由于成像中的短暂停留或开关作用而形成的椒盐噪声是导致图像质量下降的主要因素之一.20世纪70年代Tukey 提出的基于排序统计的中值滤波,是当前使用最广泛的非线性抑制噪声的方法之一,然而,中值滤波器的去噪效果依赖于滤波窗口的大小及参与中值计算的像素点数目,不同大小的滤波窗口对输出图像的质量有很大的影响,窗口过小,去除噪声的能力不好,窗口过大,又会损失大量的细节信息,造成图像的模糊.为了克服这些矛盾,出现了多种基于中值滤波的改进算法,如自适应中值滤波(Adaptive median filter,A MF )[1],开关中值滤波(S witch median filter,S W F )[2],极值中值滤波(Extr e m um median filter,E MF )[3],加权中值滤波(W eighted median filter,WMF ).这些算法在改善中值滤波器的性能方面做了重要的贡献,但在实际应用中都有各自的局限性,如S W F 在噪声密度低时效果较好,其性能随着输入图像信噪比的降低接近于标准中值滤波,E MF 虽然在一定程度上可以减少误差的累计传播,但随着噪声密度的增加,滤波性能也会迅速下降,WMF 通过加权,虽然降低了细节的损失,但同时去噪声性能也下降了.相比之下,A MF 具有较为优秀的滤波性能,但随着噪声密度的增加,保护细节的能力下降较快.因此,本文提出一种基于极值中值滤波算法的改进算法,该算法由噪声检测和噪声滤除两个部分组成.通过实验表明,该算法在一定程度上缓解了降噪和保护图像细节之间的矛盾.1 噪声检测椒盐噪声的PDF 可由以下公式描述:p (z )=P az =a p bz =b0其他(1)与图像信号的强度相比,椒盐干扰通常较大,因此在一幅图像中,椒盐噪声可以数字化为图像灰度值的最大最小值,负椒盐噪声以一黑点出现,正椒盐噪声以白点出现在图像中,若一幅图像的噪声密度为30%,则该图像中有15%的像素受负椒盐噪声影响,15%的像素受正椒盐噪声影响,而其余70%的像素的灰度值和原图像一致.[4]:20080720:20080910::.自然图像中,相邻像素之间存在着较大的相关性,某点的灰度值与其周围点的灰度值非常接近,除了孤立点(一般认为是噪声)外,即使在边缘部分也满足.在一幅图像中,如果一个像素点的值和其邻域的值相差很远,那么,该点很有可能就是被噪声点污染了,否则,如果其值与邻点很接近,就应该是一个有效的信号点.而滤波窗口尺寸的选择对噪声检测的准确性有很大影响,小尺寸的滤波窗口虽然对细节保护较好,但滤除噪声的能力较差,而大尺寸窗口则相反,滤除噪声能力较强,但同时易造成图像细节的模糊和扭曲.在噪声检测阶段,主要目的是尽可能准确的检测出噪声点,所以可以采用较大的检测窗口(如7×7或5×5).经过大量实验,当噪声密度达到90%时,采用7×7的检测窗口就足够了.利用参考文献[3]提出的极值检测.设f是被噪声污染的图像,其在位置(i,j)处的像素灰度值为f(i,j).令w[fij]表示以像素f(i,j)为中心的噪声检测窗口区域,找出其中的极大值和极小值,该方法的噪声检测过程为:f(i,j)∈n f(i,j)=m in(w[f ij])or m ax(w[f ij])s m in(w[fij])<f(i,j)<m ax(w[fij])(2)其中,n表示噪声,s表示信号.2 噪声滤波在噪声检测阶段采用7×7的大窗口进行极值检测,生成一个和原图像大小相同的二值噪声标记矩阵,可用1表示噪声,0表示信号.完成噪声检测后,在噪声滤除阶段,只需对标记为噪声的像素进行滤波处理,而信号点保持原灰度值不变,此时在小窗口内首先对滤波窗口内的椒盐噪声密度进行估计,如果噪声密度较低,采用改进的均值滤波方法,当滤波窗口内椒盐噪声密度很高时,采用递归方式以实现对高密度椒盐噪声的有效去除.该滤波方法的具体执行过程如下:设被噪声污染的图像f经过滤波后的输出图像为g,用噪声检测窗口(7×7)对污染图像进行极值检测,生成二值噪声标记矩阵,其中0为信号,1为可能的噪声,在接下来的噪声滤除阶段(滤波窗口3×3),只对噪声标记矩阵中的噪声点进行滤波处理,信号点的灰度值保持不变.如果某一点为噪声点,以该点为中心选择大小为3×3的滤波窗口,根据噪声标记矩阵,如果在滤波窗口内有信号点存在,则找出其中的信号点,用滤波窗口内信号点的均值取代原噪声点的灰度值.如果该滤波窗口内全部为噪声点(即噪声密度较大),取该中心像素周围已经进行噪声滤波的四个点的均值进行递归均值计算[5].即g(i,j)=[^g(i-1,j-1)+^g(i-1,j)+^g(i-1,j+1)+^g(i,j-1)]/4(3)对于图像的边界点,需要进行边界扩展,四个边界外扩一行一列,可满足滤波窗口为3×3,本文在处理中,采用了对称扩展,这样扩展能使边界的滤波效果较好.3 实验结果分析(标准中值、极值中值、自适应、本文结果分析)在仿真实验中,采用大小为256×256×8bit的标准测试图像lena为例来验证本文的滤波效果,实验时,在原始图像中加入密度不同的椒盐噪声,并对本文的理论基础极值中值和效果较好的自适应中值滤波及本文提出的方法进行了滤波效果比较.对于图像的滤波效果的评价采用主观和客观评价两种标准.客观标准采用PS NR(peak signal to noise rati o)峰值信噪比和MAE(m ean absolute err or)平均绝对值差来衡量滤波质量数值指标.其定义如下:MSE=1M×N∑Mi=1∑Nj=1[fy(i,j)-g(i,j)]2(4) PS NR=10lg2552MSE(5)MA E=1M×N∑Mi=1∑Nj=1|fy(i,j)-g(i,j)|(6)其中fy(i,j)为原始图像的像素值,g(i,j)为滤波后输出图像的像素值.这些指标的比较如表1所示,从该表中可以看出在图像中加入不同密度的噪声,本文的方法均能达到比较好的滤波效果.表1 各种算法输出结果的客观评价滤波方法性能指标椒盐噪声密度30%50%70%80%极值中值(5×5)PS NR 30.228224.347414.686610.6911MAE 2.34815.056418.541239.5923本文提出方法PS NR 32.286528.288325.845023.5598MAE 1.55343.88375.85927.6694自适应中值(最大窗口为7)PS NR 29.129626.373019.854415.0803MAE 2.84534.51349.850119.1558标准中值(5×5)PS NR 24.308720.775413.53539.9095MAE7.214010.235225.850848.8283图1 不同滤波方法的性能比较图 不同滤波方法对加入椒盐噪声的L 图像滤波效果比较 对于主观评价标准,可由图2的图像比较看出,本文的方法在噪声密度达到70%时,滤波图像的视觉效果明显好于其他方法.由图2可以看出,5×5的标准中值滤波在此时滤波效果很差,极值中值的滤波效果虽然好于标准中值,但仍有部分噪声点没有去除,自适应中值滤波将绝大部分的噪声点都滤除掉了,但同时也带来了一定程度的细节模糊.滤除噪声和保护细节是一对不可调和的矛盾,当对受到较高密度噪声污染的图像进行滤波时,必然会造成图像细节的损失,只不过本文的方法图像细节损失相对较小而已.由图2的比较结果可知,本2en a文的方法在噪声密度达到70%时,不仅可以滤除所有噪声,而且对于细节和边缘的保护能力也明显好于自适应中值滤波.通过主观和客观两个方面的滤波性能效果比较,本文的方法可以达到较好的滤波效果.4 结论本文首先分析了几种经典改进中值滤波算法,如极值中值、自适应中值等,在已有极值中值的滤波算法的基础上,提出一种改进滤波算法.本方法的改进在于首先不需要选择和图像本身特性紧密相关的阈值,避免造成误差,其次采用较大的窗口进行噪声检测,提高了噪声检测的准确性,第三能针对不同密度噪声采取不同的处理方法,提高滤波能力.在噪声密度较低时,进行改进的均值滤波,在噪声密度较高时,采用递归方式进行滤波.一方面可以保护细节,同时由于滤波窗口较小,计算量相对较小可以减少运算时间.通过从主客观两个方面对实验结果进行分析,本文提出的方法对椒盐噪声的滤波能力优于经典中值及改进算法.参考文献:[1]H wang H,Haddad R A.A Adap tive m edian filt e rs:New a l gorith m s and results[J].I EEE Transaction on I mage Proce ssi ng,1995,4(4):4992502.[2]Wang Z,ZhangD,Progressive s witching median filter for the re moval of i mpuls e nois e fr o m hig hly corrupted i mages,I EEE Trans.OnCircuits and Syste m s2II:Ana l og and Digital Signal Processi ng,1999,CAS2II,46(1):78280.[3]XI NG Z J,WANG S J,DE NG H J,et a l.A ne w filte ring algorith m ba s ed on extre m u m and median value[J].Journal of I mageand Graphics(中国图像图形学报),2001,6(6):5332536.[4]G onzalez R C,Wo ods R E.Digital I m ag e P rocessing[M].Be iji ng:Publishing House of Elec tronic s Indu stry,2003.[5]S ONG Y,L IM T,S U N L N.I m age Salt&Pepper Noise Se l f2adaptive Suppression A l gorit hn Ba s ed on Si m ilarit y Func ti on[J].ACT AAUT O MATI C SI N I C A,2007,23(5):4742478.[6]朱磊,徐佩霞.一种稳健快速的椒盐噪声抑制算法[J].小型微型计算机系统,2007,4(28):6922696.[7]王建勇,周晓光,廖启征.基于2级检测的脉冲噪声滤除算法[J].北京邮电大学学报,2005,28(3):59261.(责任编辑:王海军)An Effecti ve Sa lt2and2Pepper No ise F ilterWU Ying(School of Physi c s and El ec tronic Engineering,Nanjing Xi aozhuangUnive rsity,N anjing210017,China)Abstrac t:B ased on the extre m e median filter,an i m p r oved i m age filte r algorithm is pr oposed.D iff e r ent a lgorithm s a r e used for different noise densities.I f the noise density is l ow,the m ean filter with effec tive signa l is used;if the noise density is high,the recursive w indow filter is used.Lots of experi m ents show that the results of salt&pe ppe r noise filte ring and de tail2p r e serving are grea tly i m pr oved.Key wor ds:salt&pepper noise;extre m e detect;m ean filter;r ecursive。
均值滤波算法
均值滤波算法是用来处理和处理图像噪声的一种重要的图像处
理方法,它可以滤除与图像强度相关的不恰当的噪声。
它的主要原理是将图像中的每一个像素点的值取平均值后替换它们原本的像素值,从而降低图像中存在的噪声。
均值滤波可以有效地抑制噪声,但也会丢失图像的细节部分,比如边缘等。
均值滤波算法可以把一个图像划分为一系列的小型子频段,然后计算每一个小型子频段的平均值,以代替原始图像中的像素值。
一般来说,均值滤波算法的具体步骤如下:首先分割原始图像,然后取每一个小块的像素平均值,最后扩散现有的像素平均值到周围的像素点,替换它们原本的像素值。
均值滤波算法有一定的局限性,其去噪能力有限,特别是对椒盐噪声时尤其明显。
另外,由于均值滤波算法在去噪时将图像细节部分模糊化,所以只有在图像去噪和模糊处理上才能使用该算法。
均值滤波算法是一种非常有效的处理图像噪声的方法,在各种计算机视觉任务中都有被广泛的使用。
它的主要特点是快速、实现简单、能有效去噪,但是也有一定的局限性,所以只有在某些应用场合才能起到良好的效果。
均值滤波的实现使用的是像素替换的方法,其处理的过程是用一定区域的像素取平均来替换掉原有像素,在处理噪声时会出现对图像细节失真的情况,并且椒盐噪声处理能力较弱。
一般来说,均值滤波在图像去噪和模糊处理上可以得到很好的效果,但是如果要获得较好
的去噪效果,还可以考虑使用改进的均值滤波算法,比如加权均值滤波算法、中值滤波算法或者高斯滤波算法。
总之,均值滤波算法是一种非常有效的处理噪声的方法,它在计算机视觉任务中有着广泛的应用,能够有效地抑制噪声,但也会丢失图像的细节部分,如果要获得更好的去噪效果,可以考虑使用改进版的均值滤波算法。

几种去噪方法的比较与改进在信号处理领域,去噪是一个非常重要的任务,它是为了消除信号中的噪声成分,提高信号的质量。
有许多不同的方法可以用来去噪,这些方法之间有一些差别,也可以相互改进。
本文将对几种常见的去噪方法进行比较,并介绍它们的改进方法。
1.经典去噪方法:-均值滤波:均值滤波是一种简单的去噪方法,它用局部区域的像素值的平均值来替代当前像素的值。
这种方法的主要优点是简单易懂,计算效率高。
然而,均值滤波在去除噪声时可能会模糊图像的细节,并且对于孤立的噪声点效果较差。
-中值滤波:中值滤波是一种非线性滤波方法,它用局部区域的像素值的中值来替代当前像素的值。
与均值滤波相比,中值滤波不会模糊图像的细节,能够有效去除椒盐噪声等孤立的噪声点。
然而,对于高斯噪声等连续的噪声,中值滤波效果不佳。
-维纳滤波:维纳滤波是一种根据信号与噪声的统计特性来估计出信号的滤波方法。
它在频域上处理信号,根据信号和噪声的功率谱密度进行滤波。
维纳滤波在理论上是最优的线性估计滤波器,但是它对于噪声和信号的统计性质要求较高,对于复杂的噪声和信号模型不适用。
2.改进方法:-自适应滤波:自适应滤波是一种能够根据信号与噪声的统计特性进行自适应调整的滤波方法。
它利用邻域像素的相关性来估计滤波器的参数,从而更好地去除噪声。
自适应滤波方法可以根据图像的不同区域调整滤波器的参数,提高了去噪的效果。
其中,自适应中值滤波是一种常见的自适应滤波方法,它结合了中值滤波和自适应调整滤波器窗口的大小,能够在去除噪声的同时保护图像的细节。
-小波去噪:小波去噪利用小波变换的多尺度分析能力,将信号分解成不同尺度的频带,对每个频带进行阈值处理,然后进行重构,从而实现去噪的目的。
小波去噪具有局部性和多尺度分析的优势,能够更好地保护信号的细节和边缘。
其中,基于阈值的小波去噪是一种常见的方法,它通过设置阈值将噪声频带中的系数置零,保留信号频带中的系数,然后进行重构。
然而,小波去噪对于不同类型的信号和噪声需要选择不同的小波函数和阈值方法,这是一个非常重要的问题需要解决。
基于机器视觉的瓶装白酒杂质检测邵志敏;张意;张卫华;周激流【摘要】介绍了一种基于机器视觉的瓶装白酒杂质检测方法.为了从复杂的视觉图像中提取出微小目标,设计了一种倒置翻转式的检测方式,通过高清数字摄像机获取瓶装酒液的视频序列,采用一种改进的二次差分方法,获取瓶装酒液内可能存在的运动目标.根据气泡和可见异物的形态特征进行分类,判断出酒液中是否含有杂质.实验验证了所提方法的有效性.【期刊名称】《四川大学学报(自然科学版)》【年(卷),期】2019(056)002【总页数】6页(P235-240)【关键词】机器视觉;运动目标;倒置翻转;杂质检测【作者】邵志敏;张意;张卫华;周激流【作者单位】四川大学计算机学院 ,成都 610065;四川大学计算机学院 ,成都610065;四川大学计算机学院 ,成都 610065;四川大学计算机学院 ,成都 610065【正文语种】中文【中图分类】TP3991 引言我国是世界三大酒文化古国之一,白酒在我国已经发展了几千年,历史悠久享誉中外[1].据统计,目前国内有37000多家酒企,大中型企业占1.49%,中型企业占8.90%[2],因此存在许多小酒企,产量大以及覆盖面广而导致产品的质量不能得到有效的监管.白酒在我国的消费市场有巨大的潜力和广阔的基础,产量逐年增长,每年都有数百万吨的消费量[2],近些年,随着消费者对产品愈来愈高的质量要求,社会对白酒安全问题的关注度也愈来愈高,特别是对于瓶装白酒的安全质量问题.在瓶装白酒整个生产过程中,由于其工艺、封装技术等多方面原因,可能导致某些杂质出现在瓶装白酒中,如由于过滤装置故障或者洗瓶用水不当,导致活性炭等黑色杂质进入酒液,由于洗瓶时发生碰撞导致玻璃碎屑混入酒液中,由于未清除干净吸附在瓶盖杂质导致其进入酒液.酒液中出现的杂质影响的不仅仅是制造企业的形象和用户的消费体验[3],与此同时一些杂质的混入还可能会对消费者的身体健康带来极大的危害[4].现有国内外液体杂质检测方法可大致分为人工灯检、半自动灯检、激光射线检测、光-电检测、机器视觉检测[5]等方法.基于机器视觉的检测方法由于其检测精度高等优点在国外发达国家被广泛应用在饮料酒和医药检测等领域,比如矿泉水、啤酒、口服液等液体的检测.目前国内对瓶装液体杂质检测方法理论研究和设备开发的报道非常少,而针对基于机器视觉的瓶装白酒杂质的检测研究,据我们所知,目前在国内还处于空白阶段,针对该问题本文提出了一种检测方法,重点研究圆形瓶装白酒液体杂质检测.基于机器视觉的瓶装白酒杂质检测,摒弃了传统工业视觉系统对单帧图像的检测方式,采用高清数字摄像机获取多帧连续图像完成检测[6],图像由视频得到并且视频背景图像基本是不变的[7].经过多次的测试实验,本文提出的检测光源和照明方式,有利于提高获取多帧连续图像的质量.相对于旋转急停设计,本文给出了一种倒置翻转的机械设计方式,能够减少由于酒液的运动产生的气泡.提出一种改进的二次差分算法,由于序列图像在空间和时间上具有连续性[8],从而该算法能够解决在诸多的干扰背景下分割出细小目标的这一问题.最后针对可见杂质与气泡的形状特点进行分类,完成瓶装白酒的杂质检测.2 检测原理与算法2.1 检测流程瓶装白酒杂质检测主要依据机器视觉原理,利用高清摄像机获取的瓶装白酒序列图像,判断瓶内液体是否含有玻璃屑、纤维和黑渣等可见杂质(中国药典2015版中规定可见不溶性杂质的粒径或长度通常大于50 μm).以瓶装白酒进入黑色杂质检测区域进行检测为例,本文提出的瓶装白酒杂质检测算法的基本检测流程如下:(1) 获取序列图像.酒瓶瓶口垂直向下进入检测区域时,采用倒置翻转的方式(如图1所示),使酒液和可见杂质发生相对运动,通过摄像机获取白酒序列图像;(2) 图像预处理.采用Gamma校正以及改进的均值滤波等方法,以调整获取序列图像对比度,同时滤除部分噪声;(3) 采用改进的二次差分算法提取运动目标;(4) 获取运动目标轮廓.根据目标轮廓的特性,检测是否存在黑色可见异物,存在则剔除,否则进入白色杂质检测区域进行检测.白色杂质区域检测所采用的检测算法和检测流程与黑色杂质检测相同,只是光学成像方式以及算法中部分参数设置不同,检测算法流程图如图2所示.图1 翻转倒置示意图Fig.1 Flip inverted schematic图2 杂质检测流程图Fig.2 Flow chart of impurity detection2.2 光学成像与图像获取根据光学成像方式的不同可以把杂质分为两大类:白色杂质和黑色杂质.黑色杂质主要有铝屑、毛发和深色纤维等;白色杂质主要有玻屑、白色纤维等.要快速、准确地完成杂质检测,其中合理的光源以及光源的照明方式是关键之一,我们采用LED 光源作为成像系统的光源,LED 光源的优点包括使用寿命长、发热少、响应速度快、形状多样等[9].采用两个检测工位和两种照明方式:工位(a)的检测目标是黑色可见杂质,采用平板LED 透射成像,所获得的序列图像背景为白色,杂质由于遮挡了光线而呈黑色;工位(b)的检测目标是白色可见杂质.因被测酒瓶为光滑的圆形玻璃容器,其侧面有很强的反光效应,采用黑背景成像方式,可以减少图像上形成的亮斑,避免有用信息的丢失,更利于溶液中微粒和异物的检测识别.因此,在白酒瓶底采用平板LED 作为光源,白酒瓶背面加上黑色漫反射遮光板作为背景,利用酒液中杂质对光的折射作用,形成白色杂质黑色背景图像.两个检测工位的光路图如图3所示.(a)黑色杂质检测工位(b) 白色杂质检测工位(a) Black impurity detection station(b) White impurity detection station图3 检测工位光路示意图Fig.3 Optical path of detection station schematic2.3 可见杂质检测酒液杂质检测是机器视觉和图像处理在实际生产上的典型应用.在瓶装白酒检测中,由于可见异物的多样性和随机性[10],同时瓶体本身存在的玻璃气泡、花纹、刻纹和外壁吸附的杂质等都可能产生干扰,因而可见杂质检测是图像处理的核心部分,同时也是技术难点.2.3.1 图像预处理图像预处理的主要目的是滤除图像中的无关信息,恢复有用的真实信息[11].首先我们对获得的彩色序列图像进行Gamma校正,然后,再采用一种改进的均值滤波算法,保证在滤除无关信息的同时能够保留待检测目标.我们在实验中所用的瓶装白酒为某品牌的125 mL的圆形瓶装酒,由于圆形玻璃瓶的特殊形状,当LED等照射到瓶身时所发生光的反射以及折射效应,使瓶壁周围形成高亮区域,为减少这种效应对可见异物检测结果的影响,我们采用Gamma校正降低高亮区域的对比度.Vout=AVinγ(1)通常情况下常数A=1,输入输出在0~1范围内,Gamma因子γ<1时对比度增强,图像整体灰度值变大,γ>1时对比度降低,整体灰度值变小.Vout,Vin分别表示输出和输入图像.图像采集时可能受到脉冲信号的干扰,这里采用一种改进的均值滤波算法来滤除噪声.经过Gamma校正后的彩色图像转化为灰度图像,X=[x(i,j)]M×N表示输入图像,其中x(i,j)表示图像灰度值矩阵中(i,j)点处像素的灰度值.Wn(i,j)代表中心像素在(i,j),大小为n×n的一个窗口,在实际实验过程中n取3.则(2)令G=[y(i,j)]M×N表示滤波处理后的输出图像,D(*)表示采用的滤波器,则x(i,j)=D(Wn(i,j))(3)滤波器的具体实现过程如下:首先用W3(i,j)在X=[x(i,j)]M×N中扫描,读取W3(i,j)中各个像素的灰度值x(i,j),并将灰度值按大小排序,取灰度值中的最大值MAX和最小值MIN,若x(i,j)=MAX或x(i,j)=MIN,则令相乘权值为0.然后根据下式A=x1(i,j)×m1+x2(i,j)×m2+x3(i,j)×m3+x4(i,j)×m4+x5(i,j)×m3+x6(i,j)×m2+x7(i,j)×m1(4)得到A,其中,x1(i,j)、x2(i,j)...x7(i,j)的灰度值从小到大排列.权值m的取值规则为:m4取系数最大,m3,m2,m1逐渐减小[12].实验中取m4=0.3,m3=0.2,m2=0.1,m1=0.05.最后,令Z=(1/(2m1+2m2+2m3+m4))×A,把Z值赋给模板像素中心点x(i,j)=Z.图像经过传统的均值滤波后,噪声没有得到抑制,图像很不清晰,而改进的均值滤波,可以在有效地去除噪声同时,较好的保持细节信息,且两种算法对于检测结果的效果存在明显不同,如图4所示.2.3.2 运动目标提取由于白酒瓶身存在花纹、吸附的杂质以及在生产运输过程中因为碰撞等原因产生的细纹、刻度等诸多类型的干扰,使得检测酒液中的杂质变得困难.因而在进行瓶装白酒杂质检测时,首先使瓶体倒置翻转,酒瓶存在的干扰在序列图像中相对静止,而瓶内的液体以及可能存在的可见杂质因瓶体的翻转倒置发生运动,从而我们可以通过得到的序列图像分离出微小的运动目标.图4 均值及改进均值滤波算法处理结果对比图Fig.4 Mean and improved mean filtering algorithm processing results comparison chart另外,酒液中可能存在的可见杂质由于大小、形状和数量的不确定性,没有用于构造检测模板的先验知识[13,14],因此运用特征信息[15]进行分割是极其困难的.我们采用一种改进的二次差分算法,即隔帧图像二次差分与能量积累相结合,来提取运动目标,流程如图5所示.图5 运动目标提取流程图Fig.5 Moving target extraction flow chart在检测工位获取的连续帧图像中,选取三帧酒液序列图像f(x,y,t-n),f(x,y,t),(x,y,t+n),每帧图像间隔n,由下式分别计算出相邻两帧的绝对差灰度图像d(t-n,t)(x,y)=|f(x,y,t)-f(x,y,t-n)|(5)d(t,t+n)(x,y)=|f(x,y,t)-f(x,y,t+n)|(6)可以认为在n选取不太大的情况下,连续帧图像的背景是不变的,在差分图像中只有运动微粒能够显示出来.d(t-n,t)(x,y)表示保留了第t-n和第t帧中的运动目标图像,d(t,t+n)(x,y)表示保留了第t和第t+n帧中的运动目标图像,对差分后的图像再进行二次差分,如下式.D(x,y)=|d(t-n,t)(x,y)-d(t,t+n)(x,y)|(7)其中,D(x,y)表示保留了第t-n和第t+n中的运动目标图像,再按下式对两幅差分图像做能量积累操作,以增强运动微粒对应像素的能量.E(x,y)=d(t-n,t)(x,y)+d(t,t+n)(x,y)(8)其中,E(x,y)表示保留了三帧图像的运动目标图像,其中第t帧的运动目标像素得到增强.最后,D(x,y)和E(x,y)相减便可以得到微粒的灰度图像.F(x,y)=E(x,y)-D(x,y)(9)其中,F(x,y)中仅保留了第t帧增强的运动目标,极大的方便了后续的处理.将我们提出的改进的二次差分算法与传统差分算法以及二次差分算法进行了实验对比,如图6所示,可以看出使用改进的二次差分算法以后,极大的保留了第t帧图像中的运动目标并且所提取的运动目标的能量(即灰度值)也比传统方法更高,有效地分离出运动目标.图中标定出了部分运动目标.图6 传统及改进二次差分算法处理结果对比图Fig.6 Comparison of traditional and improved second-difference algorithm processing results2.3.3 异物检测采用Ostu’s最大类间方差法对差分后的图像进行二值化操作,将背景和目标有效的分离开来.然后我们运用形态学法,采用一个矩形框来对二值图像进行开运算去除二值化后孤立的点,其中腐蚀去除目标区域的不连续空洞,但物体面积也会减小,然后通过膨胀把原图像中像素值给恢复回来.其中进行的形态学开操作可以去除较小的点,为后续的检验判断节省时间.在瓶装白酒液体杂质检测过程中,由于倒置翻转等操作,不可避免会产生气泡.然而在提取运动目标的过程中,由于气泡和其他可见杂质的运动特性的区别不太明显,因此无法根据运动特性来去除图像中的气泡,所以在之前得到的运动目标中,可能含有气泡,增加了检测判断的难度.根据气泡和可见杂质的形状特点,从运动目标长、宽、周长、面积、长宽比等方面考察分析.长宽比是气泡和可见杂质在形状上最佳的分类方式[9].设L表示微粒的最大长度,W表示微粒的最小宽度,E=L/W表示最大长度和最小宽度的比例,若为气泡,则长宽基本相等,E约为1.而可见异物为不规则形状,E大都在1.5以上.因此在二值化操作以及形态学开运算除去较小的亮点后,计算剩下的目标点的E值,根据E值的大小区分气泡和杂质(本文实验中去除E值小于1.2的目标点),判断是否为合格品,确定出面积最大的杂质并进行标注.3 实验为了验证本论文提出方法的可行性,我们在CPU Inter core i5-6500(3.2 GHz),内存4 GB硬件系统及Visual Studio 2013和OpenCV环境下,对某品牌下125 mL圆形透明玻璃瓶装白酒进行了检测.由于实验条件的限制,主要针对在生产过程中可能引入产生的玻璃碎屑、纤维、白色絮状物及黑渣等可见异物杂质进行了实验验证,对每种类型的杂质重复检测50次(每次倒置翻转使得杂质的运动轨迹以及在摄像机中成像位置发生改变)来进行测试.检测结果如表1所示.表1 几种类型可见杂质检测结果Tab.1 Inspection result about some visible impurities异物类型漏检量漏检率(%)黑渣12白色纤维24絮状物12玻璃碎屑510有些黑渣漂浮在液面而出现漏检;玻璃碎屑的漏检率相对最高,主要原因在于,当玻璃碎屑为微小片状物时,可能吸附在瓶壁,以及条状的玻璃碎屑成像角度正好在其端面时,小于50 μm,从而产生漏检;纤维和絮状物产生漏检主要是因为可能吸附在瓶盖或者是在序列图像中位移微小,检测算法当作瓶壁干扰而漏检.图7 实验效果图Fig.7 Experimental results图7中的(a)~(d) 四幅图分别是含有白色纤维、黑渣、玻璃碎屑和白色絮状物的杂质在检测工位下的成像原图,(e)~(h)分别是(a)~(d)四幅图和其各自的前后相邻两帧图像经过滤波、二次差分以及阈值处理等操作得到的二值图像,(i)~ (l)分别是对(e)~(h)进行轮廓提取,然后通过计算最大长和最小宽的比值,而后经过分类去除气泡干扰得到的结果图.黑色异物检测工位采用背部给光,很大程度上滤除了气泡和瓶壁的干扰,因此能够明显的检测出杂质,可以从(b), (f), (j)三幅图中看出;白色异物检测工位底部给光,气泡的干扰不能够很好的被滤除,二值图像中可以看出通过处理后还存在气泡,并且由于某些气泡在急速上升时形状发生变化等其它干扰,因此可以看到(i),(k)两图中还存在气泡干扰,最后的(i1),( j1), (k1) ,(l1)四幅图显示的是系统判断标注出的最大可见杂质的放大图像.可以看出本文所提出的基于机器视觉的瓶装白酒杂质检测方法用于检测瓶装白酒中存在的可见异物具有可行性.4 结论液体杂质检测在啤酒,口服液等液体检测领域中都有有着广泛的应用,但是目前国内在这方面的应用相对较少,运用的检测方法也比较传统,本文立足于白酒杂质检测的实际应用,以填补目前市面上基于机器视觉的瓶装白酒杂质检测的空缺,提出了一种基于视频图像分析的瓶装白酒杂质检测方法,具有一定的先进性.通过对瓶装白酒中可能存在的杂质类型进行分析以及相关实验,验证了本文方法的可行性.实验结果证明本文方法能够提高自动化灯检的精度,降低劳动成本,对提高白酒生产的经济效益有一定意义.同时,由于实验条件的限制,本文方法在实际应用时,还存在许多地方需要改进,如,如何设计一套高精度的刚性机械装置来进行倒置翻转,以减少抖动并且保持每次成像位置保持一致;可以考虑增加实验的样本数,将SVM等基于学习的方法用到异物检测环节中,进一步提高检测精度;该方法对不同的酒瓶类型无法兼容,目前只支持透明瓶身,在绿色或者棕色瓶身时,算法性能大大下降.在未来的工作当中,以上问题均需进一步考虑解决.参考文献:【相关文献】[1] 徐发. 我国白酒行业现状和发展趋势分析[D]. 合肥: 合肥工业大学, 2010.[2] 田聪, 王建强. 我国白酒行业发展现状及趋势分析[J]. 北方经济, 2012(Z1): 108.[3] 宋丽. 白酒中白色絮状悬浮沉淀产生原因及处理方法[J]. 酿酒科技, 2011, 2011: 55.[4] 陈敏. 白酒包装质量检验创新因素分析[J]. 中国高新区, 2018, 11: 25.[5] 周博文. 保健酒智能视觉检测机器人技术研究[D]. 长沙: 湖南大学, 2012.[6] 李子龙, 鲍蓉, 刘伟铭. 基于复模糊逻辑系统的运动目标检测方法[J]. 江苏大学学报: 自然科学版, 2017, 38: 677.[7] 李若晨, 周刚, 琚生根.一种组合核函数的自适应目标跟踪算法[J]. 四川大学学报: 自然科学版, 2017, 54: 55.[8] Zhao Y, Zhang Z, Gao Z. A simple and workable moving objects segmentation method[C]// Proceedings of the 46th Electronics in Marine, Elmar International Symposium. [s.l.]: IEEE, 2004.[9] 张巧芬, 高健. 机器视觉中照明技术的研究进展[J]. 照明工程学报, 2011, 22: 31.[10] 周博文, 王耀南, 葛继, 等. 基于机器视觉的医药注射剂智能检测系统研究[J]. 机器人, 2009, 31: 53.[11] 吕俊瑞, 罗学刚, 岐世峰. 基于模糊度量视觉特征的非局部均值去噪[J]. 重庆邮电大学学报: 自然科学版, 2018, 30: 408.[12] 李秀峰, 苏兰海, 荣慧芳, 等. 改进均值滤波算法及应用研究[J]. 微计算机信息, 2008, 24: 235.[13] Fan J, Zhu X, Wu L. Automatic model-based semantic object extraction algorithm[J]. IEEE Trans Circuits Syst Vid, 2011, 11: 1073.[14] Schoepflin T, Chalana V, Haynor D R, et al. Video object tracking with a sequential hierarchy of template deformations[J]. IEEE Trans Circuits Syst Vid, 2011, 11: 1171. [15] 孙健钧, 赵岩, 王世刚. 基于图像梯度信息强化的SIFT特征匹配算法改进[J]. 吉林大学学报: 理学版, 2018, 56: 82.。
图像噪声的消除是图像处理中的一个重要内容,已有许多学者进行了深入的研究,并提出了许多有效算法[1-6 ]。
从大的方面说有统计滤波技术、频域滤波技术和空域处理技术,它们有各自的优点:前两者运算量大,比较复杂,精确较高;后者运算简便,但精度低。
目前比较经典的去噪声方法都会或多或少给图像带来模糊。
因此,探求一种既能去除噪声又不致使图像增加模糊的方法,一直是增强处理中的难题。
均值滤波是图像处理中一种消除噪声的基本方法,主要有简单均值滤波、线性加权滤波、倒数梯度滤波等。
均值滤波适合于去除高斯噪声。
本文基于均值滤波的基本原理,提出了一种去除椒盐噪声的加权均值滤波的改进方法,在滤除噪声的同时保留图像细节。
1 基本原理1.1 简单均值滤波器简单均值滤波器是一种运用Box模板对图像进行模板操作(卷积运算)的图像平滑方法。
所谓Box模板是指模板中所有系数都取相同值的模板,常用的3×3和5×5模板如下:Box模板对当前像素及其相邻的像素点都一视同仁,统一进行平均处理,这样就可以滤去图像中的噪声。
简单均值法的数学含义可用下式表示:式中:x,y=0,1,...,N-1;S是以(x,y)为中心的邻域的集合,M是S内的点数。
简单的均值滤波对图像局部窗口取均值代替窗口中心像素。
对于这种方法,由于每一像素点无条件地被窗口的均值代替,而窗口所包含的像素很可能既包括一种加权均值滤波的改进算法*贾书香,任小洪,王天文,梁立飞(四川理工学院 自动化与电子信息学院,四川 自贡,643000)摘 要:根据椒盐噪声污染图像灰度值取值范围的变化,提出了一种改进的加权均值滤波算法。
实验结果表明,该方法能有效地去除椒盐噪声,同时保留了图像细节。
关键词:均值滤波;加权;滤波算法;椒盐噪声中图分类号:TP391文献标识码:AAn improved algorithm of weighted mean filteringJIA Shu Xiang, REN Xiao Hong, WANG Tian Wen, LIANG Li Fei(Institute of Automation and Electronic Information, Sichuan University of Science &Engineering, Zigong 643000, China)Abstract: According to the changes of gray value range of images pollute by salt and pepper noise, this paper proposed an improved weighted mean filtering algorithm. It has proved that this algorithm can not only effectively remove salt and pepper noise, but also protect the details.Key words: mean filtering; weighted; filtering algorithm; salt and pepper noise*基金项目:人工智能四川省(高校)重点实验室项目基金资助(2007R011)54《信息化纵横》 2009年第16期《信息化纵横》 2009年第16期55欢迎网上投稿边缘也包括区域,这样图像边缘势必变得模糊,并不能很好地达到去噪保鲜边缘的目的。
引用格式:方灿, 方波, 宋志平, 等. 太赫兹成像NLM 去噪算法优化研究[J]. 中国测试,2024, 50(1): 18-23. FANG Can, FANG Bo,SONG Zhiping, et al. Research on optimization of NLM denoising algorithm for terahertz imaging[J]. China Measurement & Test,2024, 50(1): 18-23. DOI: 10.11857/j.issn.1674-5124.2023030018太赫兹成像NLM 去噪算法优化研究方 灿1, 方 波1, 宋志平2, 王 震3, 黎雅恬1, 蔡晋辉1(1. 中国计量大学计量测试工程学院,浙江 杭州 310018; 2. 浙江省新华书店集团信息技术有限公司,浙江 杭州 310002;3. 杭州大华仪器制造有限公司,浙江 杭州 311400)摘 要: 太赫兹透射式成像具有对人体无害,对非金属材料有较高的穿透性等特点。
但成像图片信噪比较低,因此文章提出一种改进的非局部均值滤波算法,该算法先利用结构张量对图像进行分区处理。
对平坦区域进行中值滤波,对非平坦区域采用改进的非局部均值滤波算法,该算法引入结构相似指标,图像通用质量指标,特征相似指标的高斯加权距离作为图像相似准则。
为探索该算法在太赫兹透射成像图片的效果,文中根据太赫兹探测器类型的不同分为单点、线阵、面阵扫描成像实验,并展开成像研究发现线阵相机中存在坏点导致成像图片存在暗条纹,可利用高斯加权中值的方式消除暗条纹。
单点扫描成像和面阵扫描成像由于运动平台移动因素和像元响应不一致性的干扰,成像图片具有噪声。
将成像图片分别运用不同的去噪算法进行降噪重建,结果表明,与传统的非局部均值滤波算法相比,改进的非局部均值滤波算法对太赫兹透射成像图像处理后所得的峰值信噪比值有1~9 dB 的提升,且和其他传统的去噪算法比较发现改进的非局部均值滤波算法处理后图像的峰值信噪比值也有2~8 dB 的提升,去噪效果较好。
一.十一种通用滤波算法(转)1、限幅滤波法(又称程序判断滤波法)A、方法:根据经验判断,确定两次采样允许的最大偏差值(设为A)每次检测到新值时判断:如果本次值与上次值之差<=A,则本次值有效如果本次值与上次值之差>A,则本次值无效,放弃本次值,用上次值代替本次值B、优点:能有效克服因偶然因素引起的脉冲干扰C、缺点无法抑制那种周期性的干扰平滑度差2、中位值滤波法A、方法:连续采样N次(N取奇数)把N次采样值按大小排列取中间值为本次有效值B、优点:能有效克服因偶然因素引起的波动干扰对温度、液位的变化缓慢的被测参数有良好的滤波效果C、缺点:对流量、速度等快速变化的参数不宜3、算术平均滤波法A、方法:连续取N个采样值进行算术平均运算N值较大时:信号平滑度较高,但灵敏度较低N值较小时:信号平滑度较低,但灵敏度较高N值的选取:一般流量,N=12;压力:N=4B、优点:适用于对一般具有随机干扰的信号进行滤波这样信号的特点是有一个平均值,信号在某一数值范围附近上下波动C、缺点:对于测量速度较慢或要求数据计算速度较快的实时控制不适用比较浪费RAM4、递推平均滤波法(又称滑动平均滤波法)A、方法:把连续取N个采样值看成一个队列队列的长度固定为N每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据.(先进先出原则) 把队列中的N个数据进行算术平均运算,就可获得新的滤波结果N值的选取:流量,N=12;压力:N=4;液面,N=4~12;温度,N=1~4 B、优点:对周期性干扰有良好的抑制作用,平滑度高适用于高频振荡的系统C、缺点:灵敏度低对偶然出现的脉冲性干扰的抑制作用较差不易消除由于脉冲干扰所引起的采样值偏差不适用于脉冲干扰比较严重的场合比较浪费RAM5、中位值平均滤波法(又称防脉冲干扰平均滤波法)A、方法:相当于“中位值滤波法”+“算术平均滤波法”连续采样N个数据,去掉一个最大值和一个最小值然后计算N-2个数据的算术平均值N值的选取:3~14B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:测量速度较慢,和算术平均滤波法一样比较浪费RAM6、限幅平均滤波法A、方法:相当于“限幅滤波法”+“递推平均滤波法”每次采样到的新数据先进行限幅处理,再送入队列进行递推平均滤波处理B、优点:融合了两种滤波法的优点对于偶然出现的脉冲性干扰,可消除由于脉冲干扰所引起的采样值偏差C、缺点:比较浪费RAM7、一阶滞后滤波法A、方法:取a=0~1本次滤波结果=(1-a)*本次采样值+a*上次滤波结果B、优点:对周期性干扰具有良好的抑制作用适用于波动频率较高的场合C、缺点:相位滞后,灵敏度低滞后程度取决于a值大小不能消除滤波频率高于采样频率的1/2的干扰信号8、加权递推平均滤波法A、方法:是对递推平均滤波法的改进,即不同时刻的数据加以不同的权通常是,越接近现时刻的数据,权取得越大。
编程实现算术平均值滤波算法概述及解释说明1. 引言:1.1 概述本文旨在介绍编程实现算术平均值滤波算法的原理、实现步骤、特点以及相应的编程实现。
算术平均值滤波算法是一种常用的信号处理方法,通过计算数据序列中一定数量的数据点的平均值来获得更加平滑和稳定的信号。
该算法具有简单易懂、易于实现等优势,因此被广泛应用于各个领域,如图像处理、噪声消除等。
1.2 文章结构本文主要分为五个部分:引言、算术平均值滤波算法、编程实现、实验结果与分析以及结论与展望。
其中,在引言部分,将对文章内容进行简要概述并介绍文章的整体结构;在算术平均值滤波算法部分,将详细解释该算法的原理、实现步骤和特点;随后,在编程实现部分,将讨论选择合适的编程语言和环境,并说明数据输入与处理方法以及提供代码实现示例;在接下来的实验结果与分析部分,将准备数据集并选择评估指标,展示和对比实验结果,并进行讨论和解释说明;最后,在结论与展望部分,将总结文章的主要观点和结果,并提出创新性和局限性分析以及未来的研究方向。
1.3 目的本文的目的是通过对算术平均值滤波算法的详细介绍和编程实现来帮助读者更好地理解该算法,并能够在实际应用中灵活运用。
同时,通过实验结果与分析部分的展示,读者可以了解该算法在不同数据集上的效果,并对其优缺点进行评估,为进一步改进和发展提供参考。
最后,通过结论与展望部分的总结和讨论,读者可以得出对该算法的整体认识并了解潜在研究方向。
2. 算术平均值滤波算法2.1 算法原理算术平均值滤波算法是一种常用的数字信号处理技术。
其原理是通过计算数据序列中一段连续样本的算术平均值来抑制噪声,从而达到信号平滑和去噪的目的。
具体来说,对于给定的输入序列,算术平均值滤波算法将每个样本与相邻样本的平均值进行比较,并将这个平均值作为输出结果。
通过不断地移动窗口并对窗口内数据进行求平均操作,可以得到整个数据序列的平滑化结果。
2.2 实现步骤实现算术平均值滤波算法可以按照以下步骤进行:1. 定义一个窗口大小N,确定需要计算平均值的连续样本数。
mpu6050加速度均值滤波处理算法1.引言1.1 概述概述部分的内容可以介绍本篇文章的主题和背景。
可以参考以下内容:在现代科技的高速发展下,传感器的应用已经广泛应用于各个领域,其中之一就是加速度传感器。
MPU6050是一种常见的加速度传感器,它可以在物体运动过程中测量加速度的变化。
然而,由于环境的噪声和其他普遍影响因素的存在,加速度传感器的数据往往会存在一定程度的噪声。
为了提取出准确的加速度数据,降低噪声的干扰,就需要进行信号处理。
本文将介绍一种用于MPU6050加速度传感器的信号处理算法——均值滤波算法。
这种算法通过对一段时间内的加速度数据进行平均处理,从而降低噪声的干扰。
在介绍均值滤波算法之前,我们将首先对MPU6050加速度传感器进行简要介绍,了解其基本原理和性能特点。
然后,我们将详细探讨均值滤波算法的原理和实现方式。
最后,我们将通过实验结果的分析,总结出该算法的优缺点,并给出结论。
通过阅读本文,读者将能够了解MPU6050加速度传感器的基本原理和应用场景,掌握均值滤波算法的原理及其在加速度数据处理中的应用。
希望本文能够对读者在实际工程应用中进行传感器数据处理提供一定的参考和帮助。
1.2文章结构本文的结构如下:第一部分是引言,主要包括概述、文章结构和目的。
在概述部分,介绍了MPU6050加速度均值滤波处理算法的背景和意义。
在文章结构部分,说明了文章的整体结构和各部分的内容安排。
在目的部分,明确了本文的研究目的。
第二部分是正文,主要包括MPU6050加速度传感器介绍和均值滤波算法原理。
在MPU6050加速度传感器介绍部分,首先介绍了MPU6050加速度传感器的基本原理和特点。
然后详细解析了MPU6050加速度传感器的工作原理、接口和数据输出格式。
在均值滤波算法原理部分,首先介绍了均值滤波的基本概念和原理。
然后进一步探讨了如何应用均值滤波算法来对MPU6050加速度传感器的数据进行平滑处理,提高数据的准确性和稳定性。
改进的非局部均值滤波算法郭贝贝;易三莉;贺建峰;苗莹;邵党国【摘要】非局部均值滤波算法是一种能够较好保持图像纹理细节的降噪算法,但该算法不能自适应调节滤波参数且滤波结果易产生伪影.针对这些不足,提出一种自适应的且与各向同性算法相结合的非局部均值滤波算法.通过改进的拉普拉斯算子对图像的噪声方差进行估计,并将估计的方差应用于滤波系数的计算中,实现滤波系数的自适应选择.以局部方差作为调整因子,将非局部均值滤波算法与各向同性局部滤波算法相结合,减少滤波图像产生的伪影,提高图像质量.实验结果表明,与非局部均值滤波算法相比,该算法在保留图像纹理细节的同时能够更好地减少伪影,提高图像的峰值信噪比,具有更好的降噪效果.【期刊名称】《计算机工程》【年(卷),期】2016(042)007【总页数】5页(P227-231)【关键词】非局部均值滤波;拉普拉斯算子;噪声方差;滤波系数;各向同性滤波【作者】郭贝贝;易三莉;贺建峰;苗莹;邵党国【作者单位】昆明理工大学信息工程与自动化学院,昆明650500;昆明理工大学信息工程与自动化学院,昆明650500;昆明理工大学信息工程与自动化学院,昆明650500;昆明理工大学信息工程与自动化学院,昆明650500;昆明理工大学信息工程与自动化学院,昆明650500【正文语种】中文【中图分类】TP301.6中文引用格式:郭贝贝,易三莉,贺建峰,等.改进的非局部均值滤波算法[J].计算机工程,2016,42(7):227-231.英文引用格式:Guo Beibei,Yi Sanli,He Jianfeng,et al.Im proved Non-local M eans Filtering A lgorithm[J].Computer Engineering,2016,42(7):227-231.图像降噪技术是数字图像处理领域的基础技术之一。
经典的降噪方法有基于小波的滤波算法[1]、基于偏微分方程的滤波算法[2]和基于随机场建模的方法[3]等。