精选PPT课件
39
图为采用四根导向柱的臂伸缩结构.手臂的垂直伸缩 运动由油缸3驱动.其特点是行程长,抓重大.工件形 状不规则时,为了防止产生较大的偏重力矩,采用四根 导向柱.这种结构多用于箱体加工线上.
精选PPT课件
40
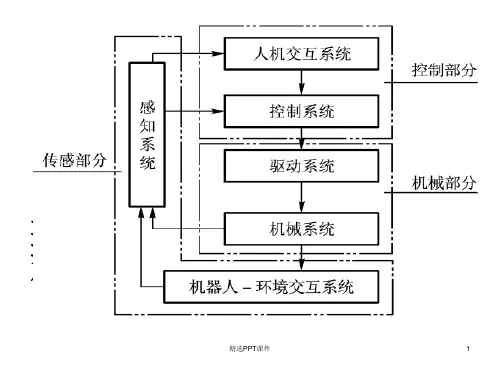
三、机器人机身和臂部的配置形式(4种)
1. 横梁式 ① 单臂悬挂式 ② 双臂悬挂式 ③ 多臂悬挂 ④ 多用于自动化生产中,在工位间传送工 件
精选PPT课件
18
圆柱坐标机器人: 1个回转运动,2个直线运动
精选PPT课件
19
球坐标(极坐标)机器人: 2个转动, 1个直线运动
精选PPT课件
20
关节坐标机器人:3个转动自由度
精选PPT课件
21
SCARA机器人:2个旋转运动, 1个直线运动
精选PPT课件
22
机器人 关节1 关节2 关节3 转动关节数
精选PPT课件
4
按照应用领域
工业机器人、农业机器人、军事机器人、 医用机器人、空间机器人、水下机器人
按照驱动方式
•液压驱动:机构紧凑、力大、运行平稳,密封
要求高
•气压驱动:结构简单造价低,负荷能力小
•电动驱动:结构简单紧凑,控制灵活
•新型:记忆合金、人工肌肉、压电
精选PPT课件
5
按控制方式分类(4种)
5、控制方式:机器人用于轴的控制方式,
伺服/非伺服,PTP/CP
6、驱动方式:关节执行器的动力源形式
精选PPT课件
27
7、精度、重复精度、分辨率:用来定义机 器人手部的定位能力。
▪ 分辨率 指机器人每根轴能够实现的最小移动距离 或最小转动角度。
▪ 精度 指机器人到达指定点的精确程度。它与机器 人驱动器的分辨率及反馈装置有关。