1基于NN 网络的电梯群控系统设计
- 格式:pdf
- 大小:132.80 KB
- 文档页数:5

一种最优路径控制方式的智能电梯群控系统的设计宋黎菁【摘要】设计了一种基于三菱FX3U的电梯群控系统,PLC之间通过N:N通信网络进行连接,总结归纳出电梯响应外呼的通用算法公式,通过电梯的各种运行状态编制算法程序,并对主、副梯进行比较筛选,最优路径的电梯进行响应.该系统具有普遍适用性,硬件和软件程序扩展简单易懂,经测试达到预期效果.【期刊名称】《信息记录材料》【年(卷),期】2017(018)009【总页数】3页(P23-25)【关键词】群控电梯;PLC;路径最优;普遍适用【作者】宋黎菁【作者单位】常州纺织服装职业技术学院机电学院江苏常州 213164【正文语种】中文【中图分类】TU857本电梯群控系统以THJDDT-5型电梯控制技术综合实训装置为控制模型,采用三菱FX3U系列PLC控制,利用N:N网络构建群控网络,选取三菱变频器进行多段速调速控制,达到轿厢平稳运行,设计PLC控制程序达到群控路径最优的要求。
下面以3台四层电梯的群控系统为例进行设计。
本系统以3台三菱FX3U系列PLC为例,采用N:N网络进行通讯,群控系统的拓扑结构如图1所示。
这种N:N网络为简易PLC连接,最多可以由8台PLC组成通讯网络。
第0号PLC称为主站点,其余称为从站点,通过通信接口模块进行连接。
主站的通讯程序及其说明如图2所示。
从站的通讯程序设置,只需将从站站点号在从站程序中赋值给D8176寄存器即可。
群控系统的控制要求为内外呼信号统一管理,多台电梯外呼信号作用相同,响应逻辑遵循路程最短的原则。
其中,单梯的响应原则为对多个同向的内选信号,按到达位置先后次序依次响应;对同时有多个内选信号与外呼信号,响应原则为“先按定向,同向响应,顺向截梯,最远端反向截梯”。
群控系统的运行任务主要由本梯内呼和群控外呼组成,本梯内呼根据单梯相应原则自行完成,群控外呼需要统一管理,以便根据群控响应原则进行统一调度。
单梯PLC控制程序已经相当成熟,这里不再赘述。

《智慧工厂》Smart FactoryMay2020基于PLC和神经网络的电梯群控最优化方法设计Design of Elevator Control System Based on PLC■齐鲁工业大学(山东省科学院)电气工程与自动化学院乔元健QiaoYuanjian摘妾:为了节能降耗,减少乘客的候梯时间'提高多层建筑内电梯的运行效率,通常需要将高层建筑内的多台电梯进行统一协调管理。
针对该类问题提出一种基于可编程逻辑控制器(PLC)和神经网络的电梯群控最优化方法,该方法采用以PLC为主的控制设备完成电梯的升降以及电梯门的开关,通过神经网络算法学习电梯运行参数并训练得到电梯群控最优化模型。
实验表明该方法能合理有效调度所有电梯,既满足了乘客的需求又达到了节能降耗的目的。
关键词:PLC神经网络电梯群控Abstract:In order to save energy and reduce consumption,reduce the waiting time of passengers and improve the operating efficiency ofelevators in multi-storey buildings,it is usually necessary to coordinate and manage multiple elevators in high-rise buildings.Aiming at this kindof problem,an optimizati o n method of elevator group control based on programmable logic contra lie r(PLC)and neural network is proposed.This method uses PLC-based control equipment to complete elevator lifting and elevator door opening and closing through neural neiworkThe algorithm learns the elevator operating parameters and trains to obtain an elevator group control optimization model.Experiments showthat this method can dispatch all elevators reasonably and effectively,which not only meets the needs of passengers but also achieves thepurpose of energy saving and con s umption reduction.Key words:PLC neural network elevator group control【中图分类号】TP216【文献标识码】B文章编号1606-5123(2020)05-0041-0031引言电梯作为中高层楼宇建筑中不可或缺的一种交通工具,其控制方法与组成结构经历了漫长的发展过程,由最初简单 的独立电梯控制、较为复杂的电梯并联运行控制、智能化的多台电梯联合控制,到现在形成了能够适应不同建筑环境的自适应电梯控制技术如何能够全方位提高电梯的服务质量一直是电梯控制领域的核心研究内容,随着对电梯服务质量需求的不断提高,不仅单梯的控制系统需要进行优化,而且对多组电梯构成电梯群的调度控制研究也变得更加深入冋。


嵌入式电梯群控系统设计为了提高电梯的运行效率和服务质量,减少乘客的候梯时间、乘梯时间并降低电梯的能量消耗,就必须用电梯群控系统来对其进行合理的管理和调度[1]。
目前,大多数电梯公司的群控系统都是采用RS485 总线进行通信,但RS485 采用主从式的通信方式,由主机发起呼叫,对应的终端应答,因此只能采取轮询的通信方式,实时性差,一旦主机出现故障,整个系统将瘫痪;而CAN 总线在电梯群控系统中却体现出更多的优势:CAN 总线通信与RS485 通信相比抗干扰能力更好;可连接较多的通信节点;通信速率更高;实时性与稳定性高,所以本文采用CAN 总线来实现群控主机和各电梯之间的通信[2]。
1 系统总体结构本系统以ARM7 为内核,主频达72 MHz 的32 bit 微处理器LPC2368 作为群控主控制器,它有高达512 KB 的片内Flash 程序存储器,具有在系统编程(ISP)和在应用编程(IAP)功能,同时LPC2368 内部集成了2 个CAN 控制器,CAN 控制器提供了一个完整的CAN 协议(遵循CAN 规范V2.0 B)实现方案。
包含这个片内CAN 控制器的微控制器用来构建功能强大的局域网,支持极高安全级别的分布式实时控制,可以用在汽车、工业环境、高速网络和低价位多路连线的应用中。
系统还选用了CAN 总线收发器MPC2551,它可作为CAN 控制器与物理总线接口,提供对总线的差动发送和接收能力。
2 通信模块设计2.1 通信模块硬件实现本系统采用LPC2368 内部集成了的CAN 控制器和高速CAN 收发器MPC2551 配合实现群控主机和各电梯之间的通信任务的,CAN 模块由2 个部分组成:控制器和接收滤波器,所有的寄存器和RAM 都作为32 bit 的字来访问。
LPC2368 的CAN 控制器具有如下的特点:2 个控制器和总线;支持11 bit 和29 bit 的标识符;双重接收缓冲器和三态发送缓冲器;可编程的错误报警界限和可读/写访问的错误计数器;仲裁丢失捕获和错误代码捕。
基于改进模糊神经网络优化的电梯群控系统发布时间:2021-12-02T07:56:14.031Z 来源:《中国电业》2021年19期作者:李少芝1,杨凯1,张泽辰2[导读] 针对电梯群控系统(elevator group control system,EGCS)存在的非线性、不确定性和滞后性,采用基于模糊神经网络优化的群控系统,改进电梯的运输能力,提高电梯的运输效率。
根据电梯运输需求,设计目标评价函数,利用粒子群算法对适应度进行判断,提高算法的收敛速度。
结论,本文提出的算法能满足电梯运输需求。
李少芝1,杨凯1,张泽辰21.马鞍山市特种设备监督检验中心;2.安徽工业大学摘要:针对电梯群控系统(elevator group control system,EGCS)存在的非线性、不确定性和滞后性,采用基于模糊神经网络优化的群控系统,改进电梯的运输能力,提高电梯的运输效率。
根据电梯运输需求,设计目标评价函数,利用粒子群算法对适应度进行判断,提高算法的收敛速度。
结论,本文提出的算法能满足电梯运输需求。
1.前言电梯群控系统是一类具有非线性和滞后性的高不确定度问题。
电梯群控系统大部分采用集中调度控制策略,由群控调度器发送请求信号,轿厢内传感器接受信号,按照调度器指令工作。
但是群控器采用的传统控制策略承担的优化功能,目前制约电梯群控系统的高效运行。
电梯群控系统的优化控制策略是根据群控系统的目标评价函数与平均乘梯时间、平均侯梯时间和系统能耗有关,因此设计一种基于模糊神经网络优化的电梯群控系统,实现改善群控系统高不确定度的问题[1]。
2.电梯群控模型的特性电梯系统的特性包括非线性多目标性以及不完备性等,使得简单的群控算法很难再改善系统的整体性能[2]。
传统的群控算法会在客流高峰出现电梯扎堆等现象,难以适应现代智能建筑的需求。
主要问题包括:无法准确识别轿厢内人数,在传统群控系统中,只能识别轿厢是否超重,当轿厢内拥挤程度很高但没有达到超重状态时,继续响应后续外呼信号但乘客无法进入,增加了轿厢内乘客的滞留时间和能源不必要的浪费;无人停靠,群控系统多梯控制出现纰漏,可能存在延时或者协调性问题,先前轿厢已将乘客接走,但输入信号没有消除,其他轿厢继续响应这个输入信号,导致不必要的能源消耗和乘客时间的损失,降低了梯群的运载效率;不能应对客流突变,由于特殊时间段内可能出现人流爆发性增长,会极大延长平均候梯时间和长候梯概率两项指标;由于电梯群控系统的多目标性,针对不同客流模式调度控制不够精细,各类客流模式控制要求各不相同,如何平衡载客效率和系统能耗相互矛盾的评价指标,是今后群控系统改进的方向[3]。
电梯群控制系统的设计分析【摘要】:面对着飞快发展的高层建筑,我们对电梯的服务品质也有了更加多的要求,单独的一台电梯一般不能达到建筑物内的交通要求。
目的是缩小大家的等候消耗时间,降低能量的消耗,需要好好装配多台电梯同时产生集中统一的控制,这类好几台电梯的优化调度体系这就是电梯群的控制体系。
因为电梯群控制体系带有随机性质、非线性质,而且很难建立精准的数学模型,利用智能控制的方式变成可能性与可行性。
【关键词】:电梯群控制系统设计【正文】:这篇文章提出了电梯群控制体系,这是在不清楚神经网络的基础上提出的。
从坐电梯的人角度来看,相较候梯的时间,降低了乘客的乘坐电梯的时间,第一时间结合考虑电梯运作的评价准则并设立了相应的模糊规矩。
然后,对电梯群的控制体系的模糊的神经网络控制方法来仿真,并与以前的舯控方式进行较量,最后证实了基础是不清楚的神经网络的电梯群控制能用于各种各样的叟通流方式,又可以达到各简单交通方式下的性能准则。
随着我国经济的迅猛进步,人民的生活水平快速的提高,工作和居住的状况得到了很大的改进。
电梯成为建筑内部的垂直的交通输送方法,和大家的工作和环境紧密相连。
跟着人们生活水平质量的提升,对电梯群控制体系有了更多更好的要求。
高层建筑物的客流转换移动速度,一般把多台电梯装配在一起,组成了电梯群,对高大建筑实行统一服务。
电梯群控制体系是利用优化控制计划来治理电梯群,用最适合的方法应对各层站及轿厢内的呼叫电梯的信号,提升电梯的用作效率和服务的品质。
电梯群控经过通常是先实时集中交通信息以得到影响电梯调度的最根本的原因,比如电梯的状况,乘客流量等等,同时将他当成电梯的调度基本单元的注入。
接着电梯的调度基本单元依据这类消息应用各种各样调度方法选择一部合适配置的电梯,同时将配置信号输出到这个电梯的控制机器。
电梯的乘坐着对电梯能力的评估很是重要,既是公共交通的方式的电梯体系,很重要的是为乘坐者提出安全、舒适。
乘坐者对电梯的准则可以分成两大类,在生理上和心理上的。
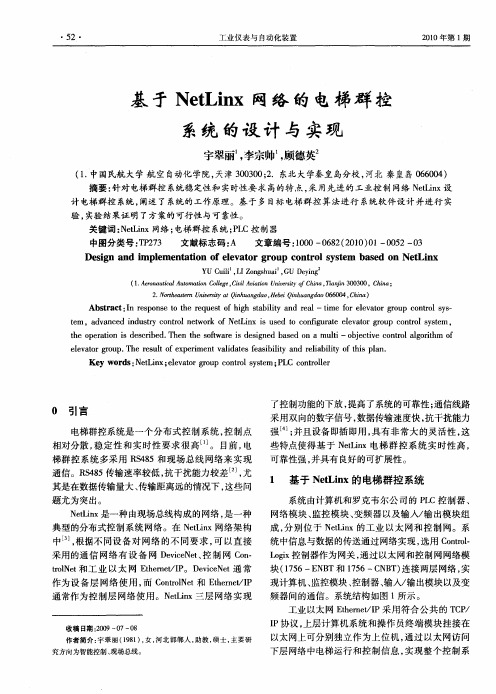
设计创新科技创新与应用Technology Innovation and Application2017年27期从站电梯N :N 网络, 通讯-K r图1群控电梯结构图作者简介:丁焕(1987-),男,辽宁营口人,工程师,硕士,主要从事汽车行业机运控制系统设计与调试工作和汽车厂柔性化与信息化控制研究;刘建强1990-),男,山西大同人,硕士生,主要研究方向为计算机控制与工程应用。
-90-基于组态软件监控的群控电梯系统设计丁煥\刘建强2(1.中国汽车工业工程有限公司,天津300113;.河北工业大学,天津300401)摘要:为了保证高层建筑中人们对电梯服务质量的要求,智能电梯群控系统已经广泛应用到人们生活的方方面面,文章设计了 一种基于组态软件监控的电梯群控智能调度的方法,并且利用MCGS组态软件设计出了嵌入式监控软件,实时监控电梯运行状态,实现了多电梯高效运行,提高了多电梯运行效率以及电梯服务质量和控制水平。
关键词:电梯群控系统;组态;智能调度中图分类号:TP 29 文献标志码:A文章编号院2095-2945 (2017) 27-0090-031概述随着现代化城市的高速发展,一幢幢高楼拔地而起。
电梯 为高楼中生活的人们重要的特种交通运输设备[1,2]。
近些年 来,电梯技术高速发展,智能电梯成为了新的研究方向。
从单 台电梯到两台电梯,再到多台电梯,电梯智能调度逐渐成为了 电梯控制技术的主要研究方向[3],将基于组态软件监控技术应 用到智能电梯控制系统中,可以有效的配合智能电梯群控系 统的设计,对整个智能电梯群控系统有效的监控,优化控制系 统。
本文以三菱PLC 为控制核心,采用N:N 网络通讯方式,实 现两台电梯同时控制,采用基于北京昆仑通态自动化软件科 技有限公司的MCGS 组态监控软件设计监控系统[4,,并且设 计多种运行模式,有效的提高了电梯的运行效率,降低电梯的 能耗。
2群控电梯结构智能电梯采用三菱FX 2N -64MR 型号的PLC 设计,采用 N:N 网络通讯方式实现多台电梯的监控,以MCGS 设计嵌入 式监控系统,以两台电梯为控制对象,设计控制系统,控制结 构图如图1所示。
一种递归神经网络的学习型电梯群控派梯算法利用递归神经网络表示学习型电梯群控派梯算法:1.1 学习型电梯群控派梯算法介绍学习型电梯群控派梯算法是一种利用递归神经网络的优化方法,可以让电梯的性能演化至最优。
该算法采用空间和时间双角度:用空间角度表达每个电梯的位置,用时间角度表达电梯移动历史数据,然后把从新输入的几组数据进行辅助,从而可以依据历史数据和当前电梯状态来确定最优的派梯路线。
1.2 递归神经网络介绍递归神经网络(RNN)是一种深度学习技术,具有记忆机制,可以识别时间序列的模式。
其基本结构是一种递归神经网络架构的基础:层次网络形式结构中,每层网络后面又接一个层网络,具有记忆机制,可以将前面时间步传递下来作为当前层步输出的一部分信号。
二、原理2.1 递归神经网络分析递归神经网络是一种深度学习方法,是一种时间序列分析方法,可以将时间序列上的数据进行分析、发现非线性模式、发现时间信息等。
它的基本原理是将前一个时间的输出作为当前时间的输入,学习用以捕捉神经网络中长期依赖关系的权重累加,维持记忆数据,像动物的记忆。
2.2 电梯群控派梯算法分析基于递归神经网络的学习型电梯群控派梯算法,首先在电梯层级中,每层网络具有输入单元、隐藏层、输出层。
每层网络在训练过程中,输入层受到全部输入信号,包括电梯的位置数据和历史移动数据;隐藏层确定电梯的未来移动;输出层输出最优的派梯结果。
三、优势3.1 动态调整递归神经网络支持算法内部迭代,可以根据实际环境要求进行调整,使得算法更具有针对性。
在电梯群控派梯中,当电梯数量发生变化时,算法可以根据这些变化自动调整,自动更新因素,保证计算准确性和有效性。
3.2 智能监控递归神经网络技术可以实现实时监控,可以记录电梯的实时状态,以及用户的出行规律,从而实现智能调度,及时处理堵暖和状态,解决网络优化问题。
3.3 综合优化利用递归神经网络的学习型电梯群控派梯算法,可以实现有效的整体优化。
基于N:N网络的电梯群控系统设计胡健刘玉宾(黄河水利职业技术学院自动化工程系,河南开封 475004)摘要:本文在分析群梯控制技术和N:N网络技术的基础上,提出了基于N:N网络的电梯群控系统(EGCS)设计方案,对3-8部电梯组成的梯群实施统一管理与监控。
为了验证设计的可行性,在实验室内搭建了3部模型电梯,经试验测试,在数字量和开关量两种模式下都可以满足群梯控制的要求,并实现了群梯系统的计算机监控。
关键词: N:N网络;可编程序控制器(PLC);电梯群控系统;监控系统中图分类号:TP273.5 文献标识码:AThe Design of elevator group Control Systems Based on N:N networkHu jian(Dept. of Automation Engineering. YRCTI, HENAN, KAIFENG 475004)Abstract:This article is on the basis of group elevators control and the N:N network technology. It proposes the design plan of elevator group-control system based on the N:N network, which uniformly manages and monitors the elevator group composed of 3-8 elevators. In order to confirm the feasibility of the design, 3 model elevators has been built in the laboratory, after the experimental test, they all can satisfy the request of group elevators controlling under the digital and switch pattern, and has realized computer monitoring on the group ladders system.Key Words:N:N network;Programmable Logic Controller (PLC);Elevator Group Control System;Monitoring System1 引言近年来,随着建筑业的蓬勃发展,高层建筑和智能化建筑的不断涌现,人们对电梯提出了越来越高的要求,单部电梯往往不能满足建筑物内垂直交通的需要,这就需要合理安装多部电梯来缓解电梯运行的压力,因此出现了电梯群控系统(EGCS)。
国外(德国、美国和日本)关于电梯群控系统的研究起步较早,1946年美国奥的斯公司就设计出了群控电梯,并于1949年首先成功应用于纽约联合国大厦。
因此,他们的技术比较成熟,其群控系统都用专用高速微处理器作控制单元,采用了CAN(控制局域网)总线通信网络和专用电梯监控系统,系统整体性能比较稳定。
相对而言,国内在电梯群控系统方面的研究则起步较晚,受国外专利技术限制,国内的群控系统多采用通用微处理器(含单片机)或可编程序控制器(PLC)作控制单元,在网络应用方面,以微处理器或单片机为控制单元的系统,多采用CAN总线网络;以PLC为控制单元的群控系统,则使用工业网络(LonWorks-局部操作网或各种现场总线(Siemens公司的Profibus、RS-485、Intel公司的Bitbus)。
从整体情况看,系统稳定性还不太理想,因此,寻找一种稳定性更好的群控方案则是国内电梯群控系统急待解决的问题。
本文设计了一种基于N:N网络的电梯群控系统,并在电梯模型上进行了实验,研究和应用表明,这是一种能很好满足电梯群控通讯质量要求的方法。
2 N:N网络简介本文所使用的N:N网络,是三菱FX2N系列PLC借助FX2N-485-BD通信模板所实现的一种数据通信系统,该网络所连接的总站点数最大为8个(1个主站、1~7个从站),网络采用半双工串行通信方式,传输标准符合RS-485,通信波特率为38400bps,最远距离为500m。
2.1 FX2N-485-BD通信模板FX2N-485-BD通信模板是FX2N系列PLC的通用通信模板,可直接连接到FX2N系列PLC的基本单元。
通过该模板可在FX2N系列PLC之间,或PLC与PC之间进行无协议、专用协议(1:N)、并行连接(1:1)及N:N网络连接等多种形式的通信。
2.2 N:N网络系统配置用FX2N-485-BD所组成的N:N网络系统配置如图1所示,除了两个端站要接终端电阻外,系统内各站点的连接方式完全一致,因此每个站点均可设置为主站,相应地其他站点则必须设置为从站,即系统内只能有一个主站(单主站)。
图1 系统配置Fig 1 System Configuration2.3 N:N网络设置及数据传输方式N:N网络采用共享软元件的方式实现数据通信,每个站点均指定有一些特定软元件(D、M)来放置本站的状态及网络特性,或给其他站点提供需要的数据,这些软元件的类型及序号是完全固定的,且对其他站点透明。
通过对D8176写入一个0~7之间的数字,可以设置该站的站点地址,0专用于主站,1~7分别用于各从站的设置;通过对D8177写入一个1~7之间的数字(默认为7),可以设置从站的总数;通过对D8178写入一个0~2之间的数字(默认为0),可以设置动态范围,对应范围如表1所列;通过对D8179写入一个0~10之间的数字(默认值为3),就可以设置重复次数;通过对D8180写入一个5~255之间的数字(默认值为5),可以设置通信超时时间,时间基数为10ms。
表1 设置刷新范围Tab 1 Setting the Refresh Range站点D8178=0 D8178=1 D8178=2地址 0个位元件 4个字元件 32个位元件 4个字元件 64个位元件 8个字元件0 — D0~D3 M1000~M1031 D0~D3 M1000~M1063 D0~D71 — D10~D13 M1064~M1095 D10~D13 M1064~M1127 D10~D172 — D20~D23 M1128~M1159 D20~D23 M1128~M1191 D20~D273 — D30~D33 M1192~M1223 D30~D33 M1192~M1255 D30~D374 — D40~D43 M1256~M1287 D40~D43 M1256~M1319 D40~D475 — D50~D53 M1320~M1351 D50~D53 M1320~M1383 D50~D576 — D60~D63 M1384~M1415 D60~D63 M1384~M1447 D60~D677 — D70~D73 M1448~M1479 D70~D73 M1448~M1511 D70~D773 硬件系统设计本文所设计的电梯控制系统采用分布式设计,硬件系统结构如图2所示。
图2 电梯群控系统结构Fig 2 The structure of Elevator group control system整个系统由主机监控系统、轿箱控制单元(每梯1个)、内呼显示控制器(每梯1个)、外呼显示控制器(各梯每层1个)、楼层显示器(各梯每层1个)、变频器(每梯1个)等组成。
各轿厢控制单元之间通过N:N网络通讯,可简化电梯的安装,提高系统的稳定性,缩短故障排查时间。
主机监控系统由一台PC机、RS-485/232转换器和监控组态软件Kingview6.5构成;控制单元采用三菱公司的新型可编程序控制器FX2N-64MR和通讯模板FX2N-485-BD构成;内呼显示控制器、外呼显示控制器采用开关+发光二极管组合按钮组装而成;楼层显示器用十进制编码器、BCD显示译码器、LED数码管和三角形发光管组装而成。
4 软件系统设计系统包含1个主站和2个从站,其中:1#电梯的PLC为主站,2#电梯的PLC为1号从站,3#电梯的PLC为2号从站。
考虑3部电梯组成群控系统时,互相之间需要有大量的数据交换,因此在N:N网络参数选择上将动态刷新模式选择为模式2。
这样,1~3#梯的共享数据寄存器和辅助继电器的范围为:1#梯:D0~D7、M1000~M1063;2#梯:D10~D17、M1064~M1127;3#梯:D20~D27、M1128~M1191。
1~3#电梯的网络初始化子程序如下:;************ 1#电梯的网络初始化子程序*************M8038 ;网络初始化启动控制0 LD1 MOV K0D8176 ;将1#梯设置为主站D8177 ;从站总数设置6 MOV K2D8178 ;联网可用元件范围设置11 MOV K2D8179 ;通信重复次数设置16 MOV K3D8180 ;通信超时时间为5×10ms=50ms21 MOV K5;************ 2#电梯的网络初始化子程序*************0 LDM8038 ;网络初始化启动控制D8176 ;将2#梯设置为1#从站1 MOV K1D8177 ;从站总数设置6 MOV K2D8178 ;联网可用元件范围设置11 MOV K2D8179 ;通信重复次数设置16 MOV K3D8180 ;通信超时时间为5×10ms=50ms21 MOV K5;*********** 3#电梯的网络初始化子程序*************M8038 ;网络初始化启动控制0 LD1 MOV K2D8176 ;将3#梯设置为2#从站D8177 ;从站总数设置6 MOV K2D8178 ;联网可用元件范围设置11 MOV K216 MOV K3D8179 ;通信重复次数设置D8180 ;通信超时时间为5×10ms=50ms21 MOV K55 结语本文所研究的电梯群控系统,紧跟电梯技术的发展方向,是使用网络技术、计算机技术、自动化技术、PLC应用技术以及现场总线控制技术控制多部电梯一次尝试。
该控制系统解决了单梯运行的种种弊端与不足,并增加了数字量控制与系统监控功能。
由于采用了基于PLC的N:N网络结构,使得系统具有较强的应用灵活性,既能应用于多部电梯的群控管理,也能用于单部电梯的控制。
该系统所采取的设计方案在实验电梯上得到了验证,并证明是可行的,但系统真正研制的成功还需通过实际运行,在实践中加以考验,并对在实际运行中出现的问题和不足加以改进,以达到完全能满足群梯控制要求的目的。