计算机图形学边缘填充算法
- 格式:ppt
- 大小:1.12 MB
- 文档页数:63

扫描线多边形填充算法扫描线多边形填充算法(Scanline Polygon Fill Algorithm)是一种计算机图形学中广泛使用的算法,用于将一个封闭的多边形形状涂色填充。
它通过扫描线的方式,从上到下将多边形内的像素按照预设的填充颜色来进行填充。
本文将详细介绍扫描线多边形填充算法的原理、流程和实现细节。
1.算法原理:扫描线多边形填充算法基于扫描线的思想,在水平方向上扫描每一行像素,并检测多边形边界与扫描线的交点。
通过将扫描线从上到下扫过整个多边形,对于每一行像素,找出与多边形边界交点的水平线段,然后根据填充颜色将像素点进行填充。
2.算法流程:-找出多边形的最小和最大Y坐标,确定扫描线的范围。
-从最小Y坐标开始,到最大Y坐标结束,逐行进行扫描。
-对于每一行,找出与多边形边界交点的水平线段。
-根据填充颜色,为每个水平线段上的像素点进行填充。
3.算法实现:-首先,需要根据给定的多边形描述边界的顶点坐标,计算出每条边的斜率、最小和最大Y值以及每条边的X坐标交点。
-然后,对于每一扫描线,找出与多边形边界交点的水平线段,即找出交点的X坐标范围。
-最后,根据填充颜色,将该范围内的像素点进行填充。
4.算法优化:- 针对复杂多边形,可以使用活性边表(AET,Active Edge Table)来管理边界信息,加快查找交点的速度。
-可以使用桶排序来排序边界事件点,提高扫描速度。
-根据多边形边的特征,对算法进行优化,减少不必要的计算和内存消耗。
5.算法应用:-扫描线多边形填充算法广泛应用于计算机图形学中的图形渲染、图像处理等领域。
-在游戏开发、CAD绘图、虚拟现实等应用中,扫描线多边形填充算法被用于快速绘制和渲染复杂多边形。
总结:扫描线多边形填充算法是一种经典的计算机图形学算法,通过扫描线的方式对多边形进行填充。
它可以高效地处理各种形状的多边形,包括凸多边形和凹多边形。
算法虽然简单,但在实际应用中具有广泛的用途。

c语言多边形区域填充算法C语言多边形区域填充算法一、介绍多边形区域填充算法是计算机图形学中的一项重要技术,用于将给定的多边形区域进行填充,使其呈现出丰富的颜色或纹理,增强图形的效果和表现力。
本文将介绍一种常用的C语言多边形区域填充算法——扫描线填充算法。
二、扫描线填充算法原理扫描线填充算法是一种基于扫描线的填充方法,其基本思想是将多边形区域按照水平扫描线的顺序,从上到下逐行扫描,通过判断扫描线与多边形边界的交点个数来确定是否进入多边形区域。
具体步骤如下:1. 首先,确定多边形的边界,将其存储为一个边表。
边表中的每个边都包含起点和终点的坐标。
2. 创建一个活性边表(AET),用于存储当前扫描线与多边形边界的交点。
初始时,AET为空。
3. 从上到下逐行扫描多边形区域,对每一条扫描线,从边表中找出与该扫描线相交的边,并将其加入AET中。
4. 对于AET中的每一对交点,按照从左到右的顺序两两配对,形成水平线段,将其填充为指定的颜色或纹理。
5. 在扫描线的下一行,更新AET中的交点的坐标,然后重复步骤4,直到扫描到多边形区域的底部。
三、代码实现下面是一个简单的C语言实现扫描线填充算法的示例代码:```#include <stdio.h>#include <stdlib.h>#include <stdbool.h>typedef struct {int x;int y;} Point;typedef struct {int yMax;float x;float dx;int next;} Edge;void fillPolygon(int n, Point* points, int color) {// 获取多边形的边界int yMin = points[0].y;int yMax = points[0].y;for (int i = 1; i < n; i++) {if (points[i].y < yMin) {yMin = points[i].y;}if (points[i].y > yMax) {yMax = points[i].y;}}// 创建边表Edge* edges = (Edge*)malloc(sizeof(Edge) * n);int k = n - 1;for (int i = 0; i < n; i++) {if (points[i].y < points[k].y) {edges[i].yMax = points[k].y;edges[i].x = points[i].x;edges[i].dx = (float)(points[k].x - points[i].x) / (points[k].y - points[i].y);edges[i].next = k;} else {edges[i].yMax = points[i].y;edges[i].x = points[k].x;edges[i].dx = (float)(points[i].x - points[k].x) / (points[i].y - points[k].y);edges[i].next = i;}k = i;}// 扫描线填充for (int y = yMin; y < yMax; y++) {int xMin = INT_MAX;int xMax = INT_MIN;for (int i = 0; i < n; i++) {if (y >= edges[i].yMax) {continue;}edges[i].x += edges[i].dx;if (edges[i].x < xMin) {xMin = edges[i].x;}if (edges[i].x > xMax) {xMax = edges[i].x;}int j = edges[i].next;while (j != i) {edges[j].x += edges[j].dx; if (edges[j].x < xMin) {xMin = edges[j].x;}if (edges[j].x > xMax) {xMax = edges[j].x;}j = edges[j].next;}}for (int x = xMin; x < xMax; x++) { drawPixel(x, y, color);}}free(edges);}int main() {// 定义多边形的顶点坐标Point points[] = {{100, 100},{200, 200},{300, 150},{250, 100}};// 填充多边形区域为红色fillPolygon(4, points, RED);return 0;}```四、总结通过扫描线填充算法,我们可以实现对多边形区域的填充,从而提升图形的表现效果。

多边形扫描线填充算法技巧扫描线填充算法是计算机图形学中常用的一种填充算法,用于对多边形进行填充。
其基本原理是通过扫描线与多边形边界的交点来确定需要填充的像素点。
本文将介绍多边形扫描线填充算法的基本思想以及一些常用的优化技巧。
一、基本思想多边形扫描线填充算法的基本思想是将多边形分解成一系列水平线段,然后对每条水平线段进行扫描,找出与多边形边界相交的点,并进行填充。
具体步骤如下:1. 确定多边形的边界:对于给定的多边形,首先需要确定其边界。
可以使用边界表(edge table)来存储多边形的边界信息,包括每条边的起点和终点坐标以及斜率等。
2. 初始化扫描线:从多边形边界中找出最小的y坐标和最大的y坐标,作为扫描线的起点和终点。
3. 扫描线算法:对于每条扫描线,通过遍历边界表,找出与扫描线相交的边界线段。
根据相交点的x坐标,确定需要填充的像素点范围。
4. 填充像素点:根据上一步确定的像素点范围,将扫描线上的像素点进行填充。
二、技巧和优化1. 边界表的构建:为了提高算法的效率,可以对边界表进行排序,按照扫描线的y坐标来排序。
这样可以减少对边界表的遍历次数,提高算法的执行速度。
2. 边界交点的计算:在扫描线算法中,需要计算扫描线与多边形边界的交点。
可以使用活性边表(active edge table)来存储当前与扫描线相交的边界线段,并根据交点的x坐标进行排序。
这样可以减少计算交点的次数,提高算法的效率。
3. 填充像素点的优化:在填充像素点时,可以使用扫描线种子填充算法来进行优化。
该算法通过选择合适的填充起点,在填充过程中自动推进扫描线,减少不必要的计算和填充操作,提高填充的速度。
4. 填充规则的处理:在实际应用中,可能会遇到一些特殊情况,如多边形内部有孔洞或交叉等。
针对这些情况,可以通过修改填充规则来处理。
常用的填充规则有奇偶填充规则和非零填充规则,可以根据实际情况选择合适的填充规则。
5. 像素点颜色的处理:在多边形填充过程中,可以通过设置填充的颜色或纹理来实现不同的效果。
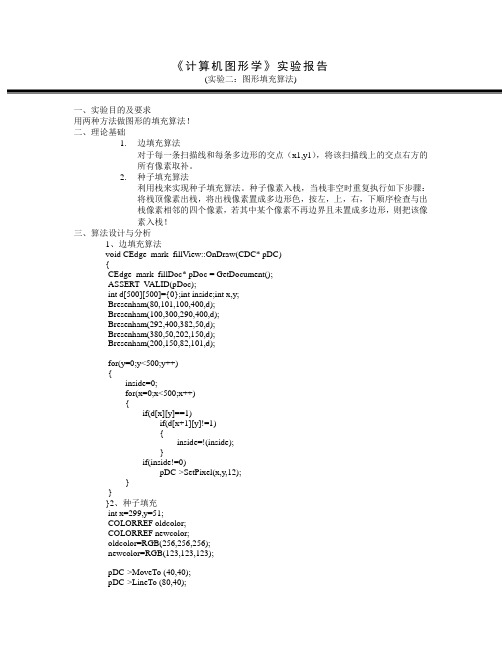
《计算机图形学》实验报告(实验二:图形填充算法)一、实验目的及要求用两种方法做图形的填充算法!二、理论基础1.边填充算法对于每一条扫描线和每条多边形的交点(x1,y1),将该扫描线上的交点右方的所有像素取补。
2.种子填充算法利用栈来实现种子填充算法。
种子像素入栈,当栈非空时重复执行如下步骤:将栈顶像素出栈,将出栈像素置成多边形色,按左,上,右,下顺序检查与出栈像素相邻的四个像素,若其中某个像素不再边界且未置成多边形,则把该像素入栈!三、算法设计与分析1、边填充算法void CEdge_mark_fillView::OnDraw(CDC* pDC){CEdge_mark_fillDoc* pDoc = GetDocument();ASSERT_V ALID(pDoc);int d[500][500]={0};int inside;int x,y;Bresenham(80,101,100,400,d);Bresenham(100,300,290,400,d);Bresenham(292,400,382,50,d);Bresenham(380,50,202,150,d);Bresenham(200,150,82,101,d);for(y=0;y<500;y++){inside=0;for(x=0;x<500;x++){if(d[x][y]==1)if(d[x+1][y]!=1){inside=!(inside);}if(inside!=0)pDC->SetPixel(x,y,12);}}}2、种子填充int x=299,y=51;COLORREF oldcolor;COLORREF newcolor;oldcolor=RGB(256,256,256);newcolor=RGB(123,123,123);pDC->MoveTo (40,40);pDC->LineTo (80,40);pDC->LineTo (70,80);pDC->LineTo (40,40);FloodFill(51,51,RGB(255,255,255),RGB(0,0,255));pDC->LineTo (40,40);void CMyView::FloodFill(int x,int y,COLORREF oldcolor,COLORREF newcolor) {CDC* pDC;pDC=GetDC();if(pDC->GetPixel(x,y)==oldcolor){pDC->SetPixel(x,y,newcolor);FloodFill(x,y-1,oldcolor,newcolor);FloodFill(x,y+1,oldcolor,newcolor);FloodFill(x-1,y,oldcolor,newcolor);FloodFill(x+1,y,oldcolor,newcolor);}四、程序调试及结果的分析1、2、四、实验心得及建议由于很多不会,所以这次没能按时当堂完成,下来花了不少时间才弄出来,第二种尤其比较麻烦,在同学的帮助下才做出来了。

六边形填充多边形算法-概述说明以及解释1.引言1.1 概述在计算机图形学中,六边形填充多边形算法是一种常用的方法,用于在离散的像素网格中填充一个给定的多边形区域。
这个算法主要的思路是利用六边形单元格来填充多边形,通过适当的规则和判断条件来确定哪些六边形单元格应该被填充,从而实现多边形的填充效果。
本文将详细介绍六边形填充多边形算法的原理、步骤以及优缺点,并结合具体的示例进行讲解。
通过深入学习和理解这一算法,读者可以更好地掌握在计算机图形学领域中处理多边形填充的技术手段,从而为实际应用场景中的图形渲染、图像处理等问题提供有效的解决方案。
1.2 文章结构:本文将首先介绍六边形填充多边形算法的概述,包括其背景和基本概念。
接着将详细讲解算法的原理,解释其实现的基本思路和机制。
然后,我们将逐步分析算法的具体步骤,包括算法的实现过程和关键步骤。
接下来,我们将探讨算法的优缺点,评价其在实际应用中的优劣势。
最后,我们将对本文进行总结,讨论六边形填充多边形算法在不同领域的应用前景,并展望未来的研究方向。
通过本文的讲解,读者将对六边形填充多边形算法有一个全面深入的了解。
1.3 目的:本文的目的是介绍六边形填充多边形算法,通过深入解析该算法的原理、步骤以及优缺点,帮助读者了解如何利用六边形填充多边形算法来有效解决填充多边形的问题。
通过本文的阐述,读者可以深入了解该算法的工作原理,从而更好地应用于实际的计算机图形学和几何方面的相关领域。
同时,本文还将探讨该算法的应用领域和未来的发展方向,旨在为读者提供对六边形填充多边形算法的全面了解,以促进该算法在实际应用中的推广和应用。
2.正文2.1 算法原理六边形填充多边形算法是一种基于六边形网格的填充算法,旨在将一个任意形状的多边形以最优方式填充为由六边形组成的图案。
该算法的原理主要包括以下几个步骤:1. 网格初始化:首先将待填充的多边形通过离散化的方式转换为六边形网格,确定网格的大小和分辨率。

多边形填充算法
多边形填充算法是一种计算机图形学中的算法,用于将一个封闭的多边形区域(如矩形、三角形、梯形等)填充成指定的颜色。
在计算机图形学中,多边形是由一系列线段(边)连接成的封闭区域。
填充算法的目的是在多边形的内部填充指定的颜色。
这种算法通常用于计算机辅助设计、计算机游戏开发、计算机动画、计算机视觉等领域。
填充算法有多种实现方法,包括扫描线填充、种子填充、边界填充、区域分割等。
其中,扫描线填充是最常见的一种算法,它的基本思想是从多边形的最上面一行开始,逐行向下扫描,同时记录扫描线和多边形之间的交点。
当扫描线与多边形的边相交时,根据交点的奇偶性来判断该点是否在多边形内部。
如果是奇数个交点,则该点在多边形内部,需要进行填充;如果是偶数个交点,则该点在多边形外部,不需要填充。
种子填充是另一种常见的填充算法,它的基本思想是从多边形内部的一个点(种子)开始,向外扩散填充。
在扩散过程中,同时记录已经填充过的像素点,避免重复填充。
这种算法的优点是填充速度较快,但容易出现填充区域不封闭、填充效果不理想等问题。
边界填充和区域分割是另外两种填充算法,它们的实现方式比较复杂,但可以处
理比较复杂的填充情况,例如多个子多边形共同填充、奇异多边形填充等。
总的来说,多边形填充算法在计算机图形学中具有重要的应用价值和研究意义,不同的填充算法各有优缺点,需要根据具体的需求和应用场景来选择合适的算法。
多边形填充算法本在计算机图形学中,使用多边形填充算法可以实现各种图形的绘制,例如:圆形、椭圆形、字母等。
对于任意形状的多边形来说,其内部像素点的坐标是无法直接计算得到的,因此需要通过一定的算法来实现。
常见的多边形填充算法有扫描线填充算法和边界填充算法。
接下来我们来详细了解这两种算法。
扫描线填充算法是通过扫描多边形上的每一条水平线,找到与多边形相交的线段,并进行填充操作。
具体步骤如下:1.找到多边形的最高点和最低点,作为扫描线的起点和终点。
2.将扫描线从起点依次向下移动,直到到达终点。
3.在每一条扫描线上,找到与多边形相交的线段。
4.根据线段的起点和终点,计算交点的x坐标,并从起点到终点对应的像素点进行填充。
5.重复步骤4,直到所有的扫描线都处理完毕。
扫描线填充算法的优点是简单易懂,适用于一般情况。
但是对于复杂的多边形来说,会存在边界交叉的情况,需要特殊处理。
边界填充算法是通过检测多边形的边界点,并进行填充操作。
具体步骤如下:1.找到多边形的最左边、最右边、最上边和最下边的点,作为边界点。
2.从最上边的点开始,依次向下遍历每一行像素点。
3.在每一行中,寻找与多边形边界相交的点,并进行填充操作。
4.重复步骤3,直到到达最下边的点。
边界填充算法的优点是对具有复杂交叉边界的多边形也能进行正确的填充操作。
但是对于非凸多边形来说,边界填充算法可能会有空隙出现。
除了以上两种常见的多边形填充算法,还有其他一些算法也可以实现多边形的填充操作,例如:扫描转换填充算法、边界边框填充算法等。
在实际应用中,多边形填充算法通常结合图形处理库或者计算机图形学软件来实现。
这些软件提供了丰富的函数和方法,可以直接调用进行多边形的填充操作。
综上所述,多边形填充算法是计算机图形学中的一个重要算法。
通过扫描线填充算法或者边界填充算法,可以实现对任意形状多边形的填充操作。
随着计算机图形学的发展,多边形填充算法也不断进化和优化,以满足不同应用场景的需求。
计算机图形学——区域填充算法(基本光栅图形算法)⼀、区域填充概念区域:指已经表⽰成点阵形式的填充图形,是象素的集合。
区域填充:将区域内的⼀点(常称【种⼦点】)赋予给定颜⾊,然后将这种颜⾊扩展到整个区域内的过程。
区域填充算法要求区域是连通的,因为只有在连通区域中,才可能将种⼦点的颜⾊扩展到区域内的其它点。
1、区域有两种表⽰形式1)内点表⽰:枚举出区域内部的所有象素,内部所有象素着同⼀个颜⾊,边界像素着与内部象素不同的颜⾊。
2)边界表⽰:枚举出区域外部的所有象素,边界上的所有象素着同⼀个颜⾊,内部像素着与边界象素不同的颜⾊。
21)四向连通区域:从区域上⼀点出发可通过【上、下、左、右】四个⽅向移动的组合,在不越出区域的前提下,到达区域内的任意象素。
2)⼋向连通区域:从区域上⼀点出发可通过【上、下、左、右、左上、右上、左下、右下】⼋个⽅向移动的组合,在不越出区域的前提下,到达区域内的任意象素。
⼆、简单种⼦填充算法给定区域G⼀种⼦点(x, y),⾸先判断该点是否是区域内的⼀点,如果是,则将该点填充为新的颜⾊,然后将该点周围的四个点(四连通)或⼋个点(⼋连通)作为新的种⼦点进⾏同样的处理,通过这种扩散完成对整个区域的填充。
这⾥给出⼀个四连通的种⼦填充算法(区域填充递归算法),使⽤【栈结构】来实现原理算法原理如下:种⼦像素⼊栈,当【栈⾮空】时重复如下三步:这⾥给出⼋连通的种⼦填充算法的代码:void flood_fill_8(int[] pixels, int x, int y, int old_color, int new_color){if(x<w&&x>0&&y<h&&y>0){if (pixels[y*w+x]==old_color){pixels[y*w+x]== new_color);flood_fill_8(pixels, x,y+1,old_color,new_color);flood_fill_8(pixels, x,y-1,old_color,new_color);flood_fill_8(pixels, x-1,y,old_color,new_color);flood_fill_8(pixels, x+1,y,old_color,new_color);flood_fill_8(pixels, x+1,y+1,old_color,new_color);flood_fill_8(pixels, x+1,y-1,old_color,new_color);flood_fill_8(pixels, x-1,y+1,old_color,new_color);flood_fill_8(pixels, x-1,y-1,old_color,new_color);}}}简单种⼦填充算法的不⾜a)有些像素会多次⼊栈,降低算法效率,栈结构占空间b)递归执⾏,算法简单,但效率不⾼,区域内每⼀像素都要进/出栈,费时费内存c)改进算法,减少递归次数,提⾼效率三、扫描线种⼦填充算法基本思想从给定的种⼦点开始,填充当前扫描线上种⼦点所在的⼀区段,然后确定与这⼀段相邻的上下两条扫描线上位于区域内的区段(需要填充的区间),从这些区间上各取⼀个种⼦点依次把它们存起来,作为下次填充的种⼦点。
实验题目: 实验二有效边表填充算法1.实验目的:设计有效边表结点和边表结点数据结构设计有效边表填充算法编程实现有效边表填充算法2.实验描述:下图 1 所示多边形覆盖了12 条扫描线, 共有7 个顶点和7 条边。
7 个顶点分别为:P0(7, 8), P1(3, 12), P2(1, 7), P3(3, 1), P4(6, 5), P5(8, 1), P6(12, 9)。
在1024×768 的显示分辩率下, 将多边形顶点放大为P0(500,400), P1(350, 600), P2(250, 350), P3(350, 50), P4(500, 250), P5(600, 50), P6(800, 450)。
请使用有效边表算法填充该多边形。
图1示例多边形图2 屏幕显示多边形3.算法设计:(1)建立AET和BUCKET类;(2)初始化桶, 并在建立桶结点时为其表示的扫描线初始化为带头结点的链表;(3)对每个桶结点进行循环, 将桶内每个结点的边表合并为有效边表, 并进行有效边表循环;(4)按照扫描线从小到大的移动顺序, 计算当前扫描线与多边形各边的交点, 然后把这些交点按X值递增的顺序进行排序, 配对, 以确定填充区间;(5)用指定颜色点亮填充区间内的所有像素, 即完成填充工作。
4.源程序:1)//AET.hclass AET{public:AET();virtual ~AET();double x;int yMax;double k;//代替1/kAET *next;};//AET..cppAET::AET(){}AET::~AET(){}2) //Bucket.h#include "AET.h"class Bucket{public:Bucket();virtual ~Bucket();int ScanLine;AET *p;//桶上的边表指针Bucket *next;};// Bucket.cppBucket::Bucket(){}Bucket::~Bucket(){}3)//TestView.h#include "AET.h"//包含有效边表类#include "Bucket.h"//包含桶类#define Number 7//N为闭合多边形顶点数, 顶点存放在整型二维数组Point[N]中class CTestView : public CView{。