例3-3
已知lBC=120mm,lCD=90mm,lAD=70mm,AD为机架。 (1)若该机构能成为曲柄摇杆机构,且AB为曲柄,求lAB. (2)若该机构能成为双曲柄机构,求lAB. (3)若该机构能成为双摇杆机构,求lAB.
则lAB ≤40mm. (2) 有两种情况:lBC最长,或lAB最长;100mm ≤ lAB ≤140mm (3)有三种情况; Ⅰ、AB最短、BC最长 40mm< lAB <70mm
N=7, B、C、D处均为 复合铰链. F=3×7-2×10-0=1
2、局部自由度
与机构整体运动无关、局部的独立运 动。
滚子从动件凸轮机构 PL=2≠3,C处的转动 为局部自由度。 F=3×2-2×2-1=1 引入滚子3的目的是 减少摩擦。
3、虚约束
对机构运动不起限制作用的约束。 应除去不计。
常出现在下列场合: (1)两构件见组成多个移动副,且导路平行。只一个 起作用。
第二章
平面机构运动简图及 自由度
机构由构件组成. 平面机构:所有构件都在同一平面或相互 平行的平面内运动的机构.
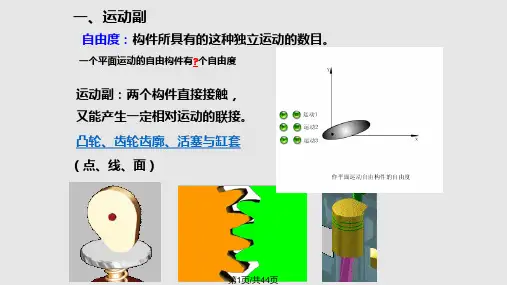
二、运动副及其分类
运动副:两构件直接接触并能保持一定形 式相对连接。 如:活塞与缸体 ,活塞与连杆的连接。 不同的运动副对运动的影响不同。 运动副分类: 按接触形式分: 低副和高副。
1、低副
两构件以面接触。
(1)移动副
相对移动
(2)转动副
相对转动。
2、高副
高副:两构件以点或线接触。 接触处压强大。 相对运动为转动或转动兼移动。
高副举例
第二节 平面机构运动简图
机构运动简图:用最简单的线条和 规定的符号表示机构各构件间相对 运动关系的图形。
注意构件和运动副的表示方法