基于模糊规则参数自整定PID控制器的仿真研究
- 格式:pdf
- 大小:265.50 KB
- 文档页数:4
模糊自整定PID 控制系统设计与仿真—— 俯仰姿态保持模糊PID 控制一、目的熟悉模糊自整定控制系统的组成原理。
掌握模糊控制原理及模糊控制规则的生成。
了解模糊控制规则对控制效果的影响。
掌握模糊方法及Matlab 实现。
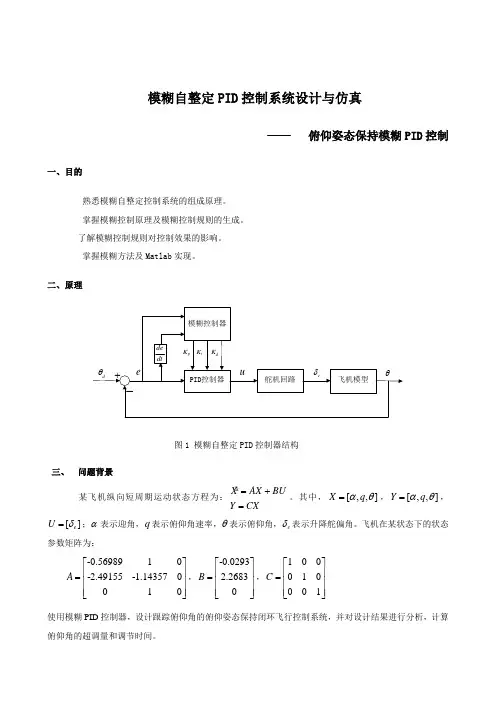
二、原理图1 模糊自整定PID 控制器结构三、 问题背景某飞机纵向短周期运动状态方程为:XA XB U YC X=+= 。
其中,[,,]X q αθ=,[,,]Y q αθ=,[]e U δ=;α表示迎角,q 表示俯仰角速率,θ表示俯仰角,e δ表示升降舵偏角。
飞机在某状态下的状态参数矩阵为: -0.5698910-2.49155-1.143570010A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,-0.02932.26830B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,10001001C ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦使用模糊PID 控制器,设计跟踪俯仰角的俯仰姿态保持闭环飞行控制系统,并对设计结果进行分析,计算俯仰角的超调量和调节时间。
俯仰姿态保持是将飞机保持在给定的俯仰姿态c θ,或者可以称为参考模态REF θ,它是由驾驶员根据某种飞行状态(水平飞行、爬升、下滑)的需要而建立的,控制系统接通后就力图保持这种姿态为常值,其原理框图如图所示。
俯仰姿态保持框图该模态的主要被控变量是俯仰姿态角,传感器是一个姿态参考陀螺。
其本身一般只在飞机水平飞行状态和短时间下滑、爬升状态下使用。
由于攻角会随飞行状态发生变化,所以在该模态下航迹倾斜角不会保持常值。
于是,如果增加推力,α将有降低的趋势,并且飞机会爬升;随着飞机重量的减轻,α也会减小,也会引起飞机逐渐爬升。
类似地,随着空气密度的降低引起α增加,爬升的飞机会逐渐改平。
将俯仰姿态角作为被控变量,除了能改变飞行轨迹之外还能用来改变空速。
由于这些特性,俯仰姿态保持常作为其它工作方式的基本控制器。
例如飞机在各种不同高度巡航飞行、稳态爬升及自动着陆时,都要求保持相应的俯仰姿态角,继而达到控制和保持所要求的飞行轨迹的目的。
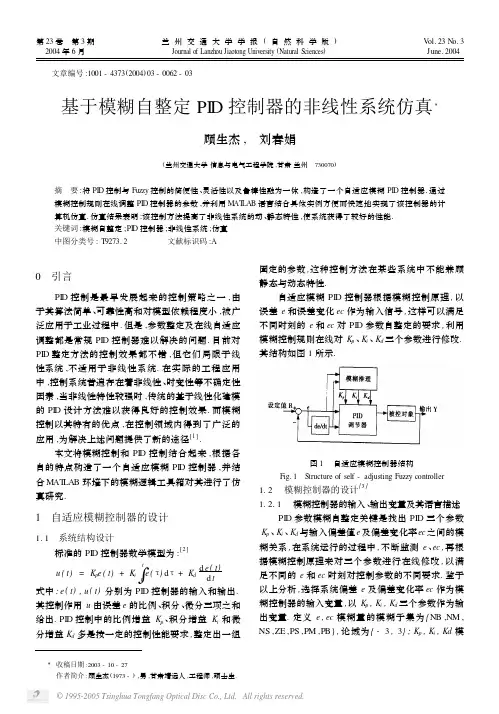
文章编号:1001-4373(2004)03-0062-03基于模糊自整定PID 控制器的非线性系统仿真Ξ顾生杰, 刘春娟(兰州交通大学信息与电气工程学院,甘肃兰州 730070)摘 要:将PI D 控制与Fuzzy 控制的简便性、灵活性以及鲁棒性融为一体,构造了一个自适应模糊PI D 控制器.通过模糊控制规则在线调整PI D 控制器的参数,并利用M AT LAB 语言结合具体实例方便而快速地实现了该控制器的计算机仿真.仿真结果表明:该控制方法提高了非线性系统的动、静态特性,使系统获得了较好的性能.关键词:模糊自整定;PI D 控制器;非线性系统;仿真中图分类号:T 9273.2 文献标识码:A0 引言PI D 控制是最早发展起来的控制策略之一,由于其算法简单、可靠性高和对模型依赖程度小,被广泛应用于工业过程中.但是,参数整定及在线自适应调整都是常规PI D 控制器难以解决的问题.目前对PI D 整定方法的控制效果都不错,但它们局限于线性系统,不适用于非线性系统.在实际的工程应用中,控制系统普遍存在着非线性、时变性等不确定性因素,当非线性特性较强时,传统的基于线性化建模的PI D 设计方法难以获得良好的控制效果.而模糊控制以其特有的优点,在控制领域内得到了广泛的应用,为解决上述问题提供了新的途径[1].本文将模糊控制和PI D 控制结合起来,根据各自的特点构造了一个自适应模糊PI D 控制器,并结合M AT LAB 环境下的模糊逻辑工具箱对其进行了仿真研究.1 自适应模糊控制器的设计1.1 系统结构设计标准的PI D 控制器数学模型为:[2]u (t )=K p e (t )+K i∫te (τ)d τ+K d d e (t )d t式中:e (t ),u (t )分别为PID 控制器的输入和输出.其控制作用u 由误差e 的比例、积分、微分三项之和给出.PID 控制中的比例增益K p 、积分增益K i 和微分增益K d 多是按一定的控制性能要求,整定出一组固定的参数,这种控制方法在某些系统中不能兼顾静态与动态特性.自适应模糊PID 控制器根据模糊控制原理,以误差e 和误差变化ec 作为输入信号,这样可以满足不同时刻的e 和ec 对PID 参数自整定的要求,利用模糊控制规则在线对K p 、K i 、K d 三个参数进行修改.其结构如图1所示.图1 自适应模糊控制器结构Fig.1 Structure of self -adjusting Fuzzy controller1.2 模糊控制器的设计[3]1.2.1 模糊控制器的输入、输出变量及其语言描述PID 参数模糊自整定关键是找出PID 三个参数K p 、K i 、K d 与输入偏差值e 及偏差变化率ec 之间的模糊关系,在系统运行的过程中,不断监测e 、ec ,再根据模糊控制原理来对三个参数进行在线修改,以满足不同的e 和ec 时刻对控制参数的不同要求.鉴于以上分析,选择系统偏差e 及偏差变化率ec 作为模糊控制器的输入变量,以K p ,K i ,K d 三个参数作为输出变量.定义e ,ec 模糊量的模糊子集为{NB ,NM ,NS ,ZE ,PS ,PM ,PB},论域为{-3,3};K p ,K i ,Kd 模Ξ收稿日期:2003-10-27作者简介:顾生杰(1973-),男,甘肃靖远人,工程师,硕士生.第23卷 第3期2004年6月兰州交通大学学报(自然科学版)Journal of Lanzhou Jiaotong University (Natural Sciences )V ol.23N o.3June.2004糊量的模糊子集为{NB ,NM ,NS ,ZE ,PS ,PM ,PB},K p 、K i 的论域为{-3,3},而K d 的论域选为{-0.1,0.1}.考虑到对论域的覆盖程度和灵敏度,稳定性与鲁棒性原则,各模糊子集均选用三角形隶属函数.1.2.2 模糊控制规则的形成模糊控制器的核心是“IF …T NEN ”形式的模糊控制规则.控制规则的选取直接关系到系统控制性能的优劣,是设计的关键.在PID 控制中,K p 、K i 、K d 具有以下特点:1)比例增益K p 增大,可以加快响应速度,减小系统稳态误差,提高控制精度,但是过大会使系统产生超调,甚至导致不稳定;2)积分作用主要是消除系统静态误差.加强积分作用,有利于减小系统静差,但是K i 过大,会加大超调,甚至引起振荡.3)微分作用可以改善动态性能.增大微分增益K d ,有利于加快系统响应,使系统超调量减小,稳定性增加,但对扰动敏感,抑制外扰能力减弱;若K d 过大,会使调节过程出现超调减速,调节时间增长;反之,若K d 过小,系统响应变慢,稳定性变差.根据上述分析同时考虑到三个参数之间的相互影响,本文建立了49条控制规则,其中K p 与E 、EC 的模糊关系如表1所示[4].表1 模糊控制规则表T ab.1 Fuzzy control rules tableeceNB NM NS ZE PS P M P B NB P B P B P M P M PS ZE ZE NM P B P B P M PS PS ZE NS NS P M P M P M PS ZE NS NS ZE P M P M PS ZE NS NM NM PS PS PS ZE NS NS NM NM P M PS ZE NS NM NM NM NB P BZEZENMNMNMNBNB2 基于SI MU LI NK 的PI D 参数整定方法及仿真以下是在M AT LAB 环境下,通过SI M U LI NK 和模糊逻辑工具箱设计完成PI D 参数整定的具体方法和步骤.考虑典型被控对象:G (s )=(s +1)/s (s 2+s +1)其中含饱和非线性环节(±5).2.1 构造FIS 编辑器1)在M AT LAB 环境下健入fuzzy 命令进入模糊逻辑工具箱,通过具有交互式图形界面的模糊推理系统编辑器和隶属函数编辑器,依照上述分析结果,选择输入、输出变量的论域范围,各个语言变量的隶属函数形状等参数.本例中5个变量的隶属函数均为三角形,并分为负大NB 、负中NM 、负小NS 、零ZE 、正小PS 、正中PM 、正大P B 等7个语言变量值.通过该模糊集合编辑器可以直观地进行参数的设计和修改.2)从Edit 菜单中选择rules 打开模糊规则编辑器确定“IF …T NE N ”形式的模糊控制规则.本例共有控制规则49条(如表1所示),每条规则的加权值都缺省为1,推理算法为max -min 合成法,解模糊方法采用取中位数法.3)利用规则查看器和表面查看器显示所涉及模糊控制器的输入、输出量对应关系,由此进行修改和优化.之后将设计好的模糊控制器保存(Save to W orkspace )在一个后缀名为fuzzy.fis 的数据库中,以备仿真时调用[5].2.2 创建仿真框图在SI M U LI NK 环境下,按照图1建立相应的仿真框图,如图2所示.其中Fuzzy subsystem 子模块即为模糊自调整机构(包括量化因子k e 及k ec 环节、比例因子环节、Fuzzy 环节),具体模型如图3所示.进行仿真前用read fis 命令将fuzzy.fis文件加载图2 控制系统仿真模型Fig.2 S imulation m odel of control system到模糊控制器模块(Fuzzy Logic C ontroller )中.模糊自整定PI D 控制器的参数为:k e =1.6,36第3期顾生杰等:基于模糊自整定PID 控制器的非线性系统仿真图3 模糊自调整机构仿真模型Fig.3 S imulation m odel of Fuzzy self -adjusting linkk ec =0.6,K p =1.2,K i =1.5,K d =3;PID 控制器参数为:K p =4.4,,K i =0.89,K d =1.22.3 仿真结果及分析仿真曲线如图4所示.图4 系统阶跃响应曲线Fig.4 S imulation response of input step wave由仿真实验结果可知,基于模糊推理自整定的PI D 控制器(F -PI D )相比于传统PI D 控制器,响应时间短、超调很小且稳态性能好,使得控制器的性能得到较大的改善.3 结束语本文提出的模糊自整定PI D 控制器,在控制回路上仍保留PI D 调节器,采用Fuzzy 推理方法作为常规PI D 控制器的自调整机构,实现了系统特性变化与控制量之间的非线性映射关系.利用M AT LAB 软件对基于模糊推理PI D 控制器的非线性系统进行了仿真研究.由此可见,在M AT LAB 环境下,通过SI M U LI NK 及模糊逻辑工具箱可以快速有效地完成模糊自整定PI D 控制器参数的整定与仿真,使用该整定方法,提高了非线性系统的控制特性.参考文献:[1] 韩瑞珍,陈国定,杨马英.基于模糊推理的自适应PI D控制器.[J ].基础自动化,2002,(2):38-40.[2] 腾青芳.优化设计非线性系统PI D 控制器的方法.[J ].兰州交通大学学报,2002,21(3):60-63.[3] 诸 静.模糊控制原理与应用[M].北京:机械工业出版社,1998.[4] 刘金琨.先进PI D 控制及其M AT LAB 仿真[M].北京:电子工业出版社,2003.[5] 邵俊鹏,徐星辉,贾慧娟.M AT LAB 在模型参考模糊自适应控制系统仿真中的应用[J ].计算机仿真,2003,(1):59-61.Simulation of N onlinear Control System B ased on Self -adjustingPI D Controller of Fuzzy I nferenceG u Shengjie , Liu Chunjuan(School of In formation &E lectrical Engineering ,Lanzhou Jiaotong University ,Lanzhou 730070,China )Abstract :A self -adjusting PI D controller ,which has sim pler structure and higher robustness ,is built when Fuzzy logic controller and PI D controller are combined together ing this control method ,the three parameters of PI D controller can be adjusted adaptively on line according to deviation and rate of deviation.A simulation m odel of typical nonlinear system is realized success fully with M AT LAB/SI M U LI NK.The results of simulation show that the controller has im proved dynamic and static performance of control system and has obtained g ood control quality.That is to say ,this con 2trol method is effective on nonlinear system.K ey w ords :fuzzy self -adjusting ;PI D controller ;nonlinear system ;simulation46兰州交通大学学报(自然科学版)第23卷。
自适应模糊PID控制器的设计与仿真自适应模糊PID控制器是一种结合了模糊控制和PID控制的自适应控制器,它能够在系统的不同工况下根据实际需求对PID参数进行自适应调整,从而使得系统具有更好的动态性能和稳定性。
本文将介绍自适应模糊PID控制器的设计思路和仿真过程。
1.设计思路1.1系统建模首先需要对待控制的系统进行建模,得到系统的数学模型。
这可以通过实验数据或者理论分析来完成。
一般情况下,系统的数学模型可以表示为:$G(s)=\frac{Y(s)}{U(s)}=\frac{K}{s(Ts+1)}$其中,K是系统的增益,T是系统的时间常数。
1.2设计模糊控制器接下来需要设计模糊控制器,包括模糊规则、模糊集和模糊运算等。
模糊控制器的输入是系统的误差和误差的变化率,输出是PID参数的调整量。
1.3设计PID控制器在模糊控制器的基础上,设计PID控制器。
PID控制器的输入是模糊控制器的输出,输出是控制信号。
1.4设计自适应机制引入自适应机制,根据系统的性能指标对PID参数进行自适应调整。
一般可以采用Lyapunov函数进行系统性能的分析和优化。
2.仿真过程在仿真中,可以使用常见的控制系统仿真软件,如MATLAB/Simulink 等。
具体的仿真过程如下:2.1设置仿真模型根据系统的数学模型,在仿真软件中设置仿真模型。
包括系统的输入、输出、误差计算、控制信号计算等。
2.2设置模糊控制器根据设计思路中的模糊控制器设计,设置模糊控制器的输入和输出,并设置模糊规则、模糊集和模糊运算等参数。
2.3设置PID控制器在模糊控制器的基础上,设置PID控制器的输入和输出,并设置PID参数的初始值。
2.4设置自适应机制设置自适应机制,根据系统的性能指标进行PID参数的自适应调整。
2.5运行仿真运行仿真,观察系统的响应特性和PID参数的变化情况。
根据仿真结果可以对设计进行调整和优化。
3.结果分析根据仿真结果,可以分析系统的稳定性、动态性能和鲁棒性等指标,并对设计进行调整和改进。
PROCE SS AUTOMAT I ON I NSTRU M ENTAT I ON Vo.l 29No .5M ay 2008参数自调整模糊PID 调节器的仿真研究Research on Sim ul ati on of Fuzzy P I D Controll er w it h Param eter Sel-f ad j u stm ent Feat ure杨广映 杨善晓 朱 涛 罗成石(台州学院物理与电子工程学院,浙江临海 318000)摘 要:主要针对实际复杂工业对象中存在的非线性、不确定性、时变性等特点,在常规模糊控制器的基础上,提出了一种参数自调整模糊控制器的设计方法。
采用该方法事先不需要获知对象的精确数学模型,而是基于人类的思维以及生产经验,用语言规则描述控制过程,并根据规则去调整控制算法或控制参数。
实验表明,参数自调整模糊控制算法具有一定的自适应性,能实现对复杂工业过程的控制。
关键词:参数自调整 模糊控制器 S 函数 子系统 自适应性中图分类号:TB24 文献标志码:AAbstract :A m i i ng at the characteri stics of co m pl ex i ndustri a l obj ects ,e .g .non -li nearity ,uncerta i nt y and tm i e var i ati on ,on the basis of con -venti onal fuzz y contro ller ,t he desi gn method for a f uzz y controller w it h parameter sel-f adj ustabl e f eature is proposed .By adopti ng t h i s method precise m at he maticalm odel o f the object i s not necessary ,i nstead ,based on hu man t h i nki ng and experience on producti on ,t he contro l process is descri bed by l anguage rules ,and t he control algor it h m or contro l para meter is adj usted i n accordance w it h the rul es .The experm i ent shows t hat the proposed contro l a l gorit h m feat ures se l -f adaptab ility and is able t o control co m pl ex i ndustri a l processes .K ey words :Para m eter se l-f adj ust m ent Fuzzy contro ller S -f uncti on Subsyste m Se l -f adaptab ility浙江省高校青年教师资助项目(编号:z x2005);台州学院物电重点项目资助项目(编号:07WD 01)。
《电液伺服系统模糊PID控制仿真与试验研究》篇一一、引言随着现代工业自动化技术的飞速发展,电液伺服系统作为重要组成部分,在众多领域中发挥着重要作用。
然而,由于电液伺服系统存在非线性、时变性和不确定性等特点,其控制问题一直是研究的热点和难点。
传统的PID控制方法在面对复杂多变的环境时,往往难以达到理想的控制效果。
因此,本文提出了一种基于模糊PID控制的电液伺服系统控制策略,并进行了仿真与试验研究。
二、电液伺服系统概述电液伺服系统主要由液压泵、液压马达、传感器和控制器等部分组成。
它利用电信号驱动液压系统工作,实现对负载的精确控制。
由于其具有高精度、快速响应等特点,在机械制造、航空航天、船舶等领域得到了广泛应用。
然而,由于电液伺服系统的复杂性,其控制问题一直是研究的重点。
三、模糊PID控制策略针对电液伺服系统的特点,本文提出了一种模糊PID控制策略。
该策略结合了传统PID控制和模糊控制的优点,通过引入模糊逻辑对PID参数进行在线调整,以适应系统参数的变化和环境干扰。
模糊PID控制策略能够在保证系统稳定性的同时,提高系统的响应速度和抗干扰能力。
四、仿真研究为了验证模糊PID控制策略的有效性,本文进行了仿真研究。
首先,建立了电液伺服系统的数学模型和仿真模型。
然后,分别采用传统PID控制和模糊PID控制对模型进行仿真实验。
通过对比两种控制策略的响应速度、稳态精度和抗干扰能力等指标,发现模糊PID控制在电液伺服系统中具有更好的性能。
五、试验研究为了进一步验证模糊PID控制策略的实用性,本文进行了试验研究。
在试验过程中,首先搭建了电液伺服系统的试验平台,然后分别采用传统PID控制和模糊PID控制对实际系统进行控制。
通过对比两种控制策略的试验结果,发现模糊PID控制在电液伺服系统中具有更高的稳态精度和更快的响应速度。
此外,在面对环境干扰时,模糊PID控制也表现出更强的抗干扰能力。
六、结论本文通过对电液伺服系统的模糊PID控制进行仿真与试验研究,验证了该策略的有效性。
模糊自整定PID控制的仿真分析本文针对于被控对象模型难以建立,参数不易整定的某些被控系统,利用常规PID在工业领域应用成熟,控制精度高的优点,同时结合模糊控制不需要精确建模、鲁棒性强、容错能力强的特点。
在常规PID控制基础之上,利用模糊控制进行模糊推理,实现PID参数的在线自整定。
利用MATLAB对模糊自整定PID进行仿真分析,仿真结果表明,模糊自整定PID,在响应速度、超调量、稳定性都比常规PID有着明显的提高。
标签:模糊控制; PID控制; 参数自整定; 仿真0 引言自PID控制理论诞生已70余年发展历史,它以结构简单、稳定性好、工作可靠、参数调整简单成为现代工业控制的主要理论之一。
但当被控对象的参数以及结构不能完全掌握或难以精确建立数学模型时,系统控制器的结构和参数必须通过工作人员的丰富经验以及现场试参法来进行确定。
模糊控制适用于模型难以建立、非线性、参数高度耦合、高迟滞的系统。
利用模糊理论在参数整定的优势特点,同时充分发挥PID控制器的优良控制作用,将提高对参数难以整定、耦合度高的被控对象的控制精度。
1 模糊自整定PID 控制器的整体设计1.1 PID 控制原理简介由比例环节、积分环节以及微分环节组成的,通过各环节组成的线性结构对给定输出与实际输出之差进行调节,使执行机构最终达到预定输入量的控制思想被称之为PID控制理论。
图1 PID控制原理框图。
(1)在式(1)中,Kp、Ki以及Kd为PID控制理论三个重要参数,分别表示为比例环节的增益,是无量纲参数;Ki为积分环节的参数,Kd为微分环节增益参数,单位为s。
这些参数需要根据系统状态进行不断调整,主要通过在线辨识方法来完成被控系统参数的整定,最终得到所需的控制结果。
其控制算法为(2)式所示。
Δu(k)=KpΔe(k)+KiΔe(k)+Kd[Δe(k)-Δe(k-1)] (2)(2)式中,为其积分系数,为其微分系数,T为其采样周期。
1.2 模糊控制基本原理模糊控制是基于工程技术人员丰富操作的经验或大量实际操作数据归纳总结出的,用自然语言来表述的,采用编程语言通过计算机控制系统可以实现的算法思想。
PID参数模糊自整定控制器的设计与仿真研究
胡锦晖;胡大斌
【期刊名称】《海军工程大学学报》
【年(卷),期】2005(017)001
【摘要】针对常规PID控制器不能在线进行参数自整定的问题,结合模糊控制技术,提出了一种PID参数模糊自整定的方法.运用Matlab模糊逻辑工具箱进行仿真研究表明,该模糊PID控制器能迅速消除系统余差,改善普通模糊控制器的性能;既具有PID控制器高精度的优点,又具有模糊控制器快速、适应性强的特点,保证了调节系统具有良好的动、稳态特性.
【总页数】4页(P97-100)
【作者】胡锦晖;胡大斌
【作者单位】海军工程大学,船舶与动力学院,湖北,武汉,430033;海军工程大学,船舶与动力学院,湖北,武汉,430033
【正文语种】中文
【中图分类】TP273.4
【相关文献】
1.模糊参数自整定PID控制器的设计与仿真研究 [J], 张睿彬
2.模糊参数自整定PID控制器的设计与仿真研究 [J], 黄峰;汪岳峰;顾军;周冰
3.基于PID参数模糊自整定的船用锅炉水位控制器设计与仿真研究 [J], 倪吉远;宋玉官;郭庆祝
4.基于MATLAB的参数模糊自整定PID控制器的设计与仿真研究 [J], 马常举;马
伯渊
5.基于时滞系统的参数自整定模糊PID控制器的设计与仿真研究 [J], 段五星;张新政
因版权原因,仅展示原文概要,查看原文内容请购买。
PID控制器参数模糊自整定研究PID控制器是一种广泛使用的工业控制系统组件,它可以根据设定值和实际输出值之间的误差来调整控制系统的增益,以实现系统的稳定性和性能优化。
然而,传统的PID控制器参数整定方法通常需要手动调整,这不仅需要丰富的经验,而且也难以保证参数的最优性。
因此,研究PID控制器参数的自动整定方法具有重要意义。
在过去的几十年中,模糊自整定技术成为了一种流行的PID控制器参数自动整定方法。
该技术结合了模糊逻辑和参数辨识,通过不断监测系统的运行状态,以及根据系统性能指标的变化来自动调整PID控制器的参数。
目前,关于PID控制器参数模糊自整定的研究已经取得了一定的进展。
在理论研究方面,研究者们已经提出了一些有代表性的模型和算法,如基于规则的模糊自整定、基于人工神经网络的模糊自整定等。
在实验研究方面,研究者们已经在各种实际应用场景中验证了模糊自整定技术的有效性和优越性,如电机控制、化工过程控制等。
模糊自整定技术的原理是基于模糊逻辑和参数辨识。
通过参数辨识算法来识别控制系统的参数,以确定PID控制器的最佳参数组合。
然后,利用模糊逻辑推理来确定PID控制器的输出,以实现对控制系统的有效控制。
根据系统的性能指标,如超调量、调节时间等,来反馈调节PID控制器的参数,以实现控制效果的优化。
在PID控制器中应用模糊自整定技术时,需要设置一些模糊参数,如输入输出变量的模糊化程度、模糊规则等。
这些参数的选择对控制效果有着重要影响。
因此,在实际应用中,需要根据具体系统和控制要求来合理设置这些参数,以达到最佳的控制效果。
通过分析实际案例,我们发现模糊自整定技术在PID控制器中的应用取得了显著的成果。
例如,在电机控制系统中,模糊自整定技术成功地提高了系统的稳定性和响应速度。
在化工过程控制中,该技术有效降低了系统的误差和超调量,提高了控制精度。
模糊自整定技术在PID控制器参数整定中具有重要意义和应用价值。
通过将模糊逻辑和参数辨识相结合,它可以实现PID控制器参数的自动调整和优化,从而提高控制系统的性能。
基于模糊PID控制器的控制方法研究一、本文概述随着科技的进步和工业的快速发展,控制系统的精确性和稳定性成为了诸多领域,如自动化、机器人技术、航空航天等的关键需求。
PID (比例-积分-微分)控制器作为经典的控制策略,已被广泛应用于各种实际工程问题中。
然而,传统的PID控制器在面对复杂、非线性和不确定性的系统时,其性能往往会受到限制。
因此,寻求一种更加灵活、适应性强的控制方法成为了当前的研究热点。
本文旨在探讨和研究基于模糊PID控制器的控制方法。
模糊PID控制器结合了传统PID控制器的优点和模糊逻辑控制的灵活性,能够在不确定和非线性环境中实现更为精准和稳定的控制。
文章首先将对模糊PID控制器的基本原理进行介绍,包括其结构、特点和工作机制。
然后,通过对比实验和仿真分析,评估模糊PID控制器在不同场景下的控制效果,并探讨其在实际应用中的潜力和挑战。
文章还将讨论模糊PID控制器的参数优化方法,以提高其控制性能和鲁棒性。
本文的研究不仅有助于深入理解模糊PID控制器的控制机理,也为相关领域提供了一种新的控制策略选择,对于推动控制理论的发展和应用具有重要的理论价值和实践意义。
二、模糊PID控制器的基本原理模糊PID控制器是一种结合了模糊逻辑与传统PID控制算法的控制方法。
它旨在通过引入模糊逻辑的优点,改善传统PID控制在处理复杂、非线性系统时的不足。
模糊化过程:将PID控制器的三个主要参数——比例系数(Kp)、积分系数(Ki)和微分系数(Kd)进行模糊化。
这通常涉及到将连续的参数值映射到一组离散的模糊集合上,如“小”“中”和“大”。
模糊推理:在模糊化之后,模糊PID控制器使用模糊逻辑规则对输入误差(e)和误差变化率(ec)进行推理。
这些规则通常基于专家知识和经验,旨在确定如何调整Kp、Ki和Kd以优化系统性能。
解模糊化:经过模糊推理后,得到的输出是模糊的。
为了将这些输出应用于实际的控制系统,需要进行解模糊化过程,即将模糊输出转换为具体的、连续的控制信号。
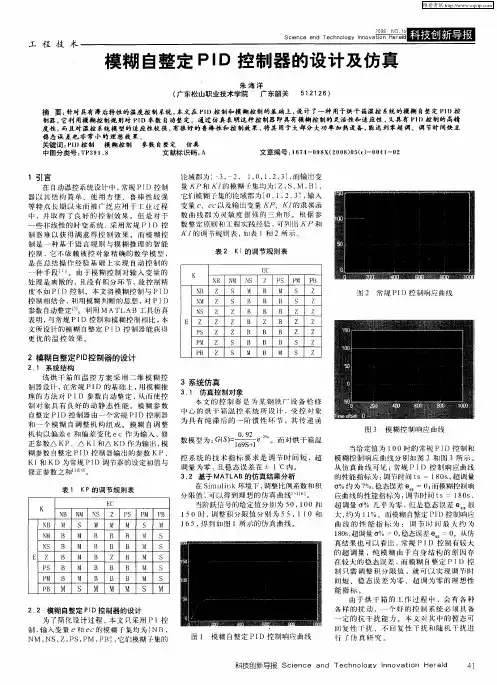
基于模糊PID参数自整定的温度控制系统的研究摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。
仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。
仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温度系统动态性能。
关键词:温度控制;Matlab仿真;模糊规则;PID在工业生产过程中温度是重要的控制参数之一,对温度的有效控制对于保证生产质量具有重大的现实意义和理论价值。
工业温度控制系统具有非线性、时变性和滞后性等特性,而常规PID控制器参数往往整定不良,性能欠佳,对运行的工作情况适应性差,导致常规PID控制不能使温度控制达到理想效果。
为了改善常规PID控制效果,增强系统的适应性,实现PID参数自整定,本文设计出一种PID参数自整定的模糊控制器。
利用模糊逻辑对PID控制器参数进行调整实现控制效果最优,将温度作为控制对象,并利用Matlab的Simulink工具箱实现仿真对比分析常规PID与模糊PID的曲线,最后应用到实际的温度控制系统中,对比分析常规PID与模糊PID的控制效果。
1 PID控制算法的相关介绍1.1 PID控制算法PID控制器因为结构简单、容易实现,并且具有较强的鲁棒性,因而被广泛应用于各种工业过程控制中。