基于ZMP的双足机器人动态步行控制研究【控制理论与控制工程专业优秀论文】
- 格式:pdf
- 大小:6.91 MB
- 文档页数:93
0 引言仿人双足机器人是通过模仿人体外形、结构和功能而设计的一类仿生机器人,一般具有双臂、双腿、躯干和头部等人体结构特征,能够像人一样进行双手协同作业和双足稳定行走[1]。
与轮式、履带式机器人相比,仿人双足机器人独特的单、双腿交替支撑行走模式具有更大的机动性和更强的环境适应能力,未来有望在军事、服务、科普和娱乐等领域获得广泛应用,具有重大的理论研究意义和实际应用价值。
仿人双足机器人的步态规划是在满足稳定步行条件的前提下,通过规划机器人步行时质心和踝关节的运动轨迹,确定机器人各关节转角随时间的变化函数曲线。
目前,生成双足机器人步态的主要方法可归为三类:1)基于人体运动捕捉数据(HMCD)的步态规划[2];2)基于力学简化模型的步态规划[3-5];3)基于智能算法的步态规划[6-7]。
以上方法中,第一类方法因人体与机器人在结构和形态上存在差异,故人体步行数据不能直接用于机器人的控制,需要经过复杂的修正、变换后才能使用;第三类方法包括人工神经网络(ANN)、中枢模式发生器(CPG)等智能算法[6-7],这类步态生成方法是机器人步态规划的发展趋势,但目前尚缺少严格的数学理论论证,仍不够成熟;而第二类方法是目前最简便、最成熟、应用最广泛的步态规划方法,主要基于二维或三维线性倒立摆、桌子-小车等力学简化模型规划步态[1,3-5]。
利用倒立摆规划双足机器人步态时,因ZMP[8](零力矩点,即地面上合力矩为零的一点)稳定性未被考虑在内,故难以获得稳定裕度较高的步态曲线。
针对这一问题,本文对传统的三维线性倒立摆模型进行改进,将期望ZMP 轨迹纳入机器人的步态生成过程中,使ZMP始终处于机器人足底形成的支撑多边形内,并保持最大的稳定裕度。
1 基于三维倒立摆模型的步态规划1.1 利用三维倒立摆模型规划质心轨迹本文采用的三维倒立摆简化力学模型如图1所示,该模型与传统三维倒立摆的不同之处在于将倒立摆的支撑位置由地面移至机器人踝关节。
双足步行机器人毕业论文交叉足印竞步机器人行走步态实现摘要机器人技术代表了机电一体化的最高成就,是二十世纪人类最伟大的成果之一,其中双足步行机器人因其体积相对较小,对非结构性环境具有较好的适应性,避障能力强,移动盲区很小等优良的品质,越来越受到人们的关注,因此对其控制研究和步态规划具有相当的现实意义。
本文的主要介绍了双足竞步机器人的国内外发展情况,以及PWM 指令算法和舵机的联动控制,通过认真的研究人类行走方式以及翻跟斗的动作,对机器人的行走步态进行简单的规划,设计出简化结构模型,然后以此为基础进行了适当的调整,设计出符合交叉足竞步机器人比赛要求的全部动作程序,设计完成后将程序下载到实验样机中,验证程序设计的可行性和合理性,通过反复的修改和验证使得机器人能顺利的完成比赛任务。
关键词:双足步行机器人步态规划PWM 控制ABSTRACTRobotic technology represents the electromechanical integration the greatest achievement of the 20th century, is one of the great achievement of human beings, the biped robot robot even though only the history of nearly 40 years, but because of its unique adaptability and human nature, became the robot to an important developing direction of field.Topics which aims to design a bipedal humanoid robot platform, based on the bipedal robot, walking gait for better finish tasks matting.Because of multi-joint robot has feet, drive and multisensor characteristics, and generally have redundant freedom, these features to its control problem has brought great difficulty, but also for various control and optimization method provides an ideal experimental platform, make its attracted many scholars eyes, become a blockbuster research direction, and so the biped robot gait planning and control study not only has high academic value, but also has quite practical significance.Based on the study of human walking style process and simplify the process after walking with a simplified model, to realize the steering gear PWM robot is effectively controlled.The paper mainly discussed the dynamic walking planning, design and simulation, detailed research using PWM control technology to achieve the linkage of the steering gear control more than.Keywords:Biped robot Gait planning PWM control目录摘要..........................................................................................................................I.I... ABSTRACT ................................................................................................................... I II 目录 .. (IV)1 绪论 (1)1.1 引言 (1)1.2 双足机器人的研究概况 (1)1.2.2 国内研究概况 (4)1.3 双足步行机器人的步行特点及研究意义 (5)1.4 本文研究内容及主要工作 (6)1.5 试验样机的介绍 (6)2 舵机联动单周期指令算法研究 (8)2.1 舵机PWM 信号介绍 (8)2.2 单舵机拖动及调速算法 (8)2.3 算法分析 (9)2.4 6 路PWM 信号发生算法解析 (10)3 交叉足机器人行走步态设计 (12)3.1 步态规划基本原则 (12)3.2 步态设计 (12)3.2.1 前三步步态设计 (13)3.2.2 翻跟头步态设计 (17)3.2.3 连续前进步态设计 (19)3.2.4 主程序流程图: (21)3.2.5 PWM_ 6 流程图 (22)4 实验验证及结果分析 (23)4.1 实验调试过程 (23)4.2 实验演示 (24)5 实验结论与总结 (28)参考文献 (29)致谢 (30)附录 (31)1 绪论1.1 引言近代机器人学是最近几十年新发展起来的一门综合性的学科,它集中了机械工程技术、计算机工程技术、控制工程技术、人工智能、电子工程技术以及仿生学十等多种学科的最新研究成果,机器人中的双足步行机器人虽然只有近四十年的历史,但是由于它独特的适应性和拟人性,成为了机器人领域的一个重要发展方向。
目录摘要 (Ⅰ)Abstract.................................................................................................. (Ⅱ)1 绪论 (3)1.1课题的研究背景和意义 (3)1.2双足机器人的国内外研究状况 (4)1.2.1国外研究状况 (4)1.2.2国内研究状况 (8)1.2.3 欠驱动双足机器人 (9)1.3欠驱动双足机器人控制存在的问题 (11)1.4本文的研究工作 (12)1.5论文的构成 (12)2 双足机器人直立平衡控制的模型研究 (13)2.1.双足机器人的欠驱动姿态 (13)2.1.1 模型简化的提出 (13)2.1.2双足机器人欠驱动姿态分析 (13)2.2物理模型 (15)2.3数学模型 (16)2.4 Matlab仿真模型 (18)2.5小结 (18)3双足机器人系统的能控能观性分析 (19)3.1 平衡稳定控制目标分析 (19)3.2 能控制性与能观测性分析 (19)3.3小结 (20)4 平衡控制策略 (21)4.1 LQR控制器简介 (21)4.2线性二次型调节器(LQR)基本原理 (21)4.3 平衡控制的仿真实现 (22)4.4 小结 (23)5仿真实验 (24)5.1控制器仿真模型 (24)5.2仿真的结果曲线 (25)5.3小结 (27)6结论与展望 (28)致谢 (28)参考文献 (29)附录 (32)附录Ⅰ(数学模型推导): (32)附录Ⅱ(仿真模型): (35)附录Ⅲ(Matlab程序语言): (36)1 绪论1.1 课题的研究背景和意义随着机器人技术的发展和控制理论的逐步成熟,对双足机器人的稳定性问题、双足机器人步行移动及各种仿人动作的研究正受到国际学者们越来越多的普遍关注。
基于控制理论、动力学原理及仿生学原理,人们通过对动物和人类的运动行为、控制技巧的研究,提出和发展了一系列复杂运动控制模态及相关算法。
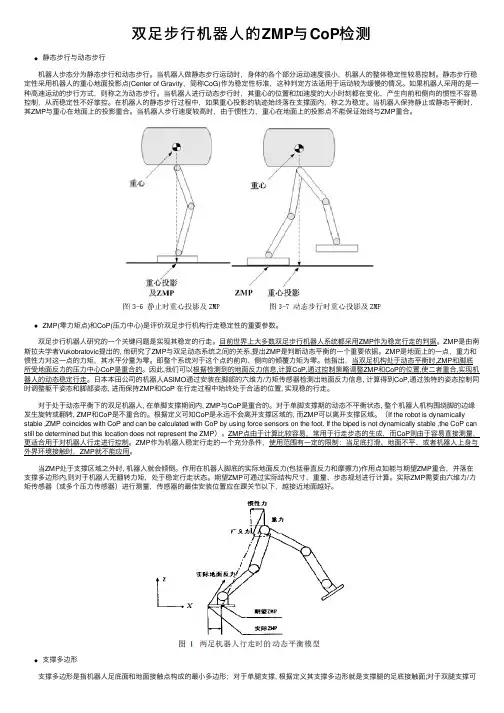
双⾜步⾏机器⼈的ZMP与CoP检测静态步⾏与动态步⾏ 机器⼈步态分为静态步⾏和动态步⾏。
当机器⼈做静态步⾏运动时,⾝体的各个部分运动速度很⼩,机器⼈的整体稳定性较易控制。
静态步⾏稳定性采⽤机器⼈的重⼼地⾯投影点(Center of Gravity,简称CoG)作为稳定性标准,这种判定⽅法适⽤于运动较为缓慢的情况。
如果机器⼈采⽤的是⼀种⾼速运动的步⾏⽅式,则称之为动态步⾏。
当机器⼈进⾏动态步⾏时,其重⼼的位置和加速度的⼤⼩时刻都在变化,产⽣向前和侧向的惯性不容易控制,从⽽稳定性不好掌控。
在机器⼈的静态步⾏过程中,如果重⼼投影的轨迹始终落在⽀撑⾯内,称之为稳定。
当机器⼈保持静⽌或静态平衡时,其ZMP与重⼼在地⾯上的投影重合。
当机器⼈步⾏速度较⾼时,由于惯性⼒,重⼼在地⾯上的投影点不能保证始终与ZMP重合。
ZMP(零⼒矩点)和CoP(压⼒中⼼)是评价双⾜步⾏机构⾏⾛稳定性的重要参数。
双⾜步⾏机器⼈研究的⼀个关键问题是实现其稳定的⾏⾛。
⽬前世界上⼤多数双⾜步⾏机器⼈系统都采⽤ZMP作为稳定⾏⾛的判据。
ZMP是由南斯拉夫学者Vukobratovic提出的, 他研究了ZMP与双⾜动态系统之间的关系,提出ZMP是判断动态平衡的⼀个重要依据。
ZMP是地⾯上的⼀点,重⼒和惯性⼒对这⼀点的⼒矩,其⽔平分量为零。
即整个系统对于这个点的前向、侧向的倾覆⼒矩为零。
他指出,当双⾜机构处于动态平衡时,ZMP和脚底所受地⾯反⼒的压⼒中⼼CoP是重合的。
因此,我们可以根据检测到的地⾯反⼒信息,计算CoP,通过控制策略调整ZMP和CoP的位置,使⼆者重合,实现机器⼈的动态稳定⾏⾛。
⽇本本⽥公司的机器⼈ASIMO通过安装在脚部的六维⼒/⼒矩传感器检测出地⾯反⼒信息, 计算得到CoP,通过独特的姿态控制同时调整躯⼲姿态和脚部姿态, 进⽽保持ZMP和CoP 在⾏⾛过程中始终处于合适的位置, 实现稳的⾏⾛。
对于处于动态平衡下的双⾜机器⼈, 在单脚⽀撑期间内, ZMP与CoP是重合的。
诚信声明本人郑重声明:本论文及其研究工作是本人在指导教师的指导下独立完成的,在完成论文时所利用的一切资料均已在参考文献中列出。
本人签名:年月日毕业设计任务书设计题目:基于MATLAB的双足步行机器人腿部运动模型的建立与运动仿真系部:机械工程系专业:机械电子工程学号:112012337学生:指导教师(含职称):(讲师)专业负责人:1.设计的主要任务及目标1)通过查阅有关资料,了解双足型机器人主要技术参数;2)双足型机器人的腿部模型建立及运动部件设计3)利用Pro/E完成动作的仿真2.设计的基本要求和内容1)双足型机器人的腿部功能选择;2)模型的建立;3)运动的仿真4)完成毕业设计说明书的撰写3.主要参考文献[1] 孙增圻.机器人系统仿真及应[ J ].系统仿真报,1995 ,7( 3 ):23-29.[2] 蒋新松,主编.机器人学导论[ M ].沈阳:辽宁:辽宁科学技术出版社,1994.[3] 蔡自兴.机器人学[ M ].北京:清华大学出版社,2000.[4] 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[ M ].北京:清华大学出版社,20024.进度安排设计各阶段名称起止日期1 发放毕业设计题目及选题2015.03.03—2015.03.232 查阅文献,了解研究意义,完成开题报告2015.03.24—2015.04.133 编写说明书,已完成工作,完成中期答辩2015.04.14—2015.05.044 继续编写毕业设计说明书2015.05.01—2015.06.015 提交设计说明书,完成毕业答辩2015.06.02—2015.06.22审核人:年月日基于Matlab的双足步行机器人腿部运动模型的建立与运动仿真摘要:最近几年,双足仿人步行机器人发展很快,有很高的科学研究价值。
步行机器人的运动是模仿人的步行运动的形式,相比其它机器人有更好的灵活性,所以可以完成各种生活中的难度更大的任务,实用价值远高于其它机器人,当然研究难度和控制也相当复杂。
双足步行机器人目录第一章摘要 (3)第二章系统简介 (4)2.1系统方案 (4)2.2功能与指标 (4)2.3实现原理 (4)2.3.1机器人动作的实现 (4)2.3.2无线操控的实现 (5)2.3.3液晶屏实时显示机器人状态原理 (6)2.3.4自适应跌倒爬起原理 (6)2.4软件流程图 (8)第三章特色列举 (9)第四章技术说明 (9)第五章系统适用范围 (9)第一章摘要以ATMEGA12单片机为核心研制的双足步行机器人。
集无线远程操控,自适应站立,状态实时无线传输于一体。
本设计以创新为起点,以实用为目的,以方便服务人类生活为宗旨,符合社会发展需要。
关键字:ATMEGA128无线操控状态实时无线传输自适应跌倒爬起第二章系统简介2.1系统方案该机器人采用加藤伊朗架构,用舵机作为关节驱动,此机器人共有17个自由度,主要包含1个头部、1个躯干、2个手臂、2条腿。
以ATMEGA12单片机为核心控制模块,采用24路舵机驱动模块,通过核心板来控制驱动模块使每个舵机转动,从而实现机器人的一系列动作。
采用XL24L01无线传输模块,从而实现无线远程操控机器人和机器人的状态参数实时传输显示在液晶屏上。
采用MPU-6050三轴陀螺仪加速度传感器,用它来检测机器人跌倒时,实现自适应跌倒爬起。
2.2功能与指标(1)能够模拟人类的动作,站立,下蹲,行走等基本动作,还能实现跳舞,倒立,翻跟头等高难度动作。
(2)能够通过无线操作平台控制机器人做出相应的动作。
(3)能够将机器人状态通过无线传输实时显示在液晶屏上。
(4)机器人跌倒时,实现自适应跌倒爬起2.3实现原理2.3.1机器人动作的实现机器人采用加藤一郎架构,用舵机作为关节驱动,此机器人共有17个自由度。
舵机是一种位置伺服的驱动器。
它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统。
在微机电系统和航模中,它是一个基本的输出执行机构。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压它内部有一个基准电路,产生周期一般为10ms,宽度为0.75ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
江南大学硕士学位论文双足步行机器人的设计与研究姓名:***申请学位级别:硕士专业:控制理论与控制工程指导教师:***20070601江南大学硕士学位论文图2.2机器人机械结构简图2.4结构设计2.4.1布置对称性步行运动中普遍存在结构对称性。
Goldbcr≯明等人研究了步行运动中的对称性,发现机身运动的对称性和腿机构的对称性之间存在相互关系。
在单足支撑阶段,对称性的机身运动要求腿部机构也是对称的;在双足支撑阶段,机身对称性运动未必需要腿部机构的对称性,除非有额外的约束条件。
根据这一点,我们在结构设计时也采用对称性布置。
2.4,2折叠腿现象所谓折叠腿现象,是指具有两个或三个自由度的关节,比如髋关节,其所有回转轴的中心线应交于~点。
在具体设计时,常用多个低副来模拟球铰。
如果低副间的旋转中心不交于一点,则腿部看上去就像被分成了几截一样。
在进行设计时,应避免折叠腿现象。
对双足步行机器人来说,其踝关节的两个自由度和髋关节的两个自由度各回转轴的中心线交于一点是很有必要的。
否则,在运动时就可能出现藕合现象,造成姿态不准确,甚至出现预料不到的摔倒现象。
2.4.3驱动方案比较与电机布置目前机器人常用的驱动方式有液压驱动、气压驱动和电机驱动三种方式。
液压驱动方式虽然具有驱动力矩大、系统响应速度快等特点,但是成本高,重量大。
气压驱动动作快、介质无污染、管理维护比较容易,但工作稳定性差,速度及位置控制比较困难。
此外,这两种驱动方式随身携带性较差,越来越不被研究者们看好。
电机驱动成本低、控制方便、精度高、安全性好、维修方便,目前的双足步行机器人大都选用这种方式。
舵机是一种特殊形式的伺服电机,最早应用在航模运动中的动力装置,现已广泛应用于机器人领域。
常用脉宽调制信号进行控制,只要能产生标准的控制信号的数字设备都可以用来控制舵机,比如PLC、单片机等。
此外,舵机体积紧凑,便于安装输出力矩,稳定性好,控制简单,因此,大大简化了整个机器人的控制结构,从而降低了机器人的成本。
基于ZMP的双足机器人动态步行控制研究的开题报告一、选题背景与意义随着技术的发展,人们对于机器人的需求越来越高,尤其是在生产、服务等领域,机器人可以替代人完成一些重复性、高难度的工作,提高工作效率和质量。
而双足机器人作为一种类人型机器人,更容易被人们接受和使用,因此得到了广泛的研究和应用。
双足机器人动态步行控制是双足机器人领域的一个重要研究方向。
动态步行是指双足机器人在行走时身体不保持平衡,通过不断调整重心来达到前进的效果。
ZMP(Zero Moment Point)是指双足机器人身体的质心与脚底间的点,通过对该点的控制可以实现双足机器人平稳行走。
因此,基于ZMP的双足机器人动态步行控制研究具有重要的理论意义和实际应用价值。
二、研究内容和目标本项目的研究内容主要包括以下几个方面:1.基于ZMP理论的双足机器人动态步行控制算法设计与实现。
2.双足机器人动态步行过程中重心调整和控制策略研究。
3.双足机器人动态步态规划和优化算法研究。
4.基于仿真和实验进行动态步行控制算法的验证与评估。
本项目的研究目标是设计一种高效、稳定的基于ZMP的双足机器人动态步行控制算法,并通过仿真和实验验证该算法的有效性和优势,为双足机器人的应用提供理论和技术支持。
三、研究方法和计划本项目的研究方法主要包括理论推导、算法设计、仿真模拟和实验验证。
首先通过对ZMP理论和双足机器人动态步行的研究,设计出合理的控制算法,并通过MATLAB等软件进行模拟;然后进行开发和调试,将算法实现在双足机器人控制系统中,并通过实验验证其有效性和性能。
项目计划分为以下几个阶段:1.熟悉双足机器人相关技术,学习动态步行控制算法和ZMP理论,分析现有研究成果。
2.基于ZMP理论,设计双足机器人动态步行控制算法,并进行仿真验证。
3.将算法实现在双足机器人控制系统中,并进行实验调试。
4.通过实验结果分析优化算法,完善控制策略,并总结研究成果,撰写论文。
四、预期成果及其创新性本项目的预期成果主要包括以下几个方面:1.设计出一种基于ZMP的双足机器人动态步行控制算法,提高双足机器人的稳定性和行走效率。
摘要摘要驱动技术,人工智能,高性能计算机等最新技术已经使双足机器人有了粗略模拟人体运动的灵巧性,能够进行舞蹈展示,乐器演奏,与人交谈等。
然而这与投入实际应用所需求的能力还有不小差距。
主要体现在缺乏与人类相近的平衡能力和步伐协调能力,对工作环境要求高,在非结构化环境中适应能力差。
因此,本文以自主研制的双足机器人为研究对象,重点研究了双足机器人的平衡控制,阻抗控制以及步态规划等内容。
本文首先简要介绍了自主研制的双足机器人的软硬件构架,建立了ADAMS 和Gazebo仿真来协助对控制算法性能预测和优化并减少对物理机器人的危险操作。
接着分析了双足机器人的正逆运动学并引入运动学库KDL来简化运动学运算。
稳定的平衡控制对于双足机器人而言在目前还是个不小的挑战。
本文就此研究了两种处理平衡的阻抗调节方案。
一种是基于LQR的固定阻抗模型,这种方案简单有效,但存在易产生振动的问题,本文结合滤波改善了平衡控制效果。
另一种是基于增强学习的自适应阻抗模型。
该方法可以在不知道系统内部动态信息的情况下利用迭代策略在线得到最优解,是对前述LQR方法的进一步优化。
随后本文通过仿真和实验进行了验证并分析了优缺点。
步态规划是机器人运动控制中最基础的一环。
本文从五连杆平面机器人入手对其运动控制进行了研究。
首先采用基于ZMP的多项式拟合法实现了机器人平地行走的步态规划。
然后分析其动力学模型并利用PD控制器进行运动仿真,就仿真中出现双腿支撑阶段跟踪误差较大的问题提出了PD与径向基神经网络混合控制的新策略。
再次通过仿真证实该方案能够减小跟踪误差。
最后,本文利用前述多项式拟合法对实验平台的物理机器人进行静态行走和上楼梯的步态规划。
针对上楼梯的步态规划的特殊性,本文提出了分段拟合来实现各关节的协同规划,并引入了躯干前倾角来辅助身体平衡。
由于时间所限,本文实现了双足机器人的稳定步行实验,上楼梯实验还尚缺稳健性,这将作为下一步的工作。
关键词:双足机器人,平衡控制,步态规划,ADAMS仿真,增强学习IABSTRACTDriving technology, artificial intelligence, high-performance computers and other latest technology has enable bipedal robots to roughly emulate the motor dexterity of humans, able to dance show, musical instruments, and talking. However, this ability still have big gap between putting into practical application. Mainly reflected in the lack of the ability of balance, and the coordination of walking. High demands on the working environment, poor adaptability in unstructured environments. In this paper, the self-developed bipedal humanoid robot is researched, and the balance control, impedance control and gait planning are mainly studied.This paper first introduces the hardware and software architecture of the biped robot, and establishes the ADAMS and Gazebo simulation to assist in the prediction and optimization of the performance of the control algorithm, so as to reduce the risk operation of the physical robot and avoiding the potential risks. Then the forward kinematics and inverse kinematics of the biped robot are analyzed and the kinematic library KDL is introduced to simplify the kinematic operation.Stable balance control is still a challenge for biped robots. In this paper, we present two schemes for impedance adjustment when dealing with the balance. One is the fixed impedance model, which is simple and effective, but there is a problem of vibration, a filter is combined in this paper to improve the balance control effect. The other is an adaptive impedance model based on integral reinforcement learning. This method can obtain the optimal solution online by using the policy iteration without knowing the dynamic information of the system. It is a further optimization of the LQR method. Then the scheme is simulated and experimented, and the advantages and disadvantages are analyzed.Gait planning is the most basic part of robot motion control. First, a simplified five-link planar robot model is established to facilitate the study. Then, the ZMP-based polynomial fitting method is used to realize the gait planning of the robot's horizontal walking. Then the dynamic model is analyzed and the PD controller is used to simulate the motion. A new strategy of PD and RBF neural network hybrid control is proposed to reduce the tracking error during DSP. Again, the simulation results show that the scheme can reduce the tracking error.IIFinally, this paper applies the polynomial fitting method to carry on the static walking and the stairway gait planning of the physical robot of the experimental platform. In view of the particularity of the gait planning of the stairs, this paper proposes a partition fitting to realize the cooperative planning of each joint and introduces the trunk leaning forward to assist the body balance. Due to time constraints, this paper has achieved a stable walking experiment of bipedal robots, and the stair experiment is still lacking in robustness, which will be the next step of the work.Keywords: biped robot, balance control, gait planning, ADAMS simulation, reinforcement learningIII目录第一章绪论 (1)1.1 研究工作的背景与意义 (1)1.2 国内外研究历史和发展态势 (2)1.2.1双足机器人的发展现状 (2)1.2.2双足机器人平衡控制概况 (6)1.2.3机器人阻抗控制概况 (7)1.2.4双足机器人步态规划及运动控制概况 (8)1.3 本文的主要工作 (9)1.4 本论文的结构安排 (10)第二章双足机器人控制系统架构与仿真平台设计 (11)2.1 双足机器人机体结构 (11)2.2 双足机器人控制系统框架设计 (13)2.2.1硬件系统设计 (13)2.2.2控制软件设计 (15)2.3 双足机器人仿真平台的设计 (16)2.3.1机器人系统常用仿真软件 (16)2.3.2ADAMS虚拟样机建模 (17)2.3.3G AZEBO模型建立 (18)2.4 本章小结 (19)第三章双足机器人运动学建模分析 (20)3.1 双足机器人位姿的描述 (20)3.2 正向运动学求解 (21)3.3 逆运动学求解 (22)3.4 五连杆平面机器人的运动仿真 (26)3.4.1开源运动学和动力学库KDL (26)3.4.2基于KDL的双足机器人运动学仿真 (26)3.5 本章小结 (27)第四章双足机器人站姿下的平衡控制 (28)4.1 双足机器人的平衡控制策略 (28)4.2 双足机器人的踝关节平衡策略 (30)IV4.2.1基于倒立摆的固定阻抗模型 (31)4.2.2基于增强学习的自适应阻抗模型 (33)4.3 仿真结果 (38)4.3.1固定阻抗与自适应阻抗仿真结果及对比 (38)4.3.2仿真算法的进一步优化 (41)4.4 实验结果 (43)4.4.1实验设计 (43)4.4.2实验结果与分析 (44)4.5 本章小结 (47)第五章五连杆双足机器人行走步态规划及控制 (48)5.1 步态规划依据和方法 (48)5.1.1步态规划的依据 (48)5.1.2离线步态规划的方法 (49)5.2 五连杆平面机器人模型的建立 (49)5.2.1五连杆模型简介 (50)5.2.2五连杆的运动学与动力学模型 (51)5.3 五连杆机器人的步态规划 (53)5.3.1摆动腿的轨迹规划 (53)5.3.2髋关节的轨迹规划 (55)5.3.3轨迹规划展示 (56)5.4 基于PD控制器的五连杆运动控制 (57)5.4.1PD控制器设计 (58)5.4.2仿真实验结果及分析 (59)5.5 基于RBFNN的五连杆运动控制 (61)5.5.1基于动力学模型的控制分析 (61)5.5.2RBF神经网络控制器设计 (62)5.5.3仿真实验结果及分析 (64)5.6 本章小结 (65)第六章双足机器人步态规划与实验 (66)6.1 双足机器人步态规划的约束 (66)6.2 双足机器人静态行走的步态规划 (66)6.2.1步行准备阶段运动规划 (67)6.2.2周期步行阶段运动规划 (69)V6.2.3步态仿真验证 (71)6.2.4双足机器人步行实验 (73)6.3 双足机器人上楼梯的步态规划 (73)6.3.1起步阶段运动规划 (73)6.3.2上楼梯双腿支撑阶段运动规划 (74)6.3.3跨两层台阶运动规划 (75)6.3.4双足机器人上楼梯仿真及实验 (76)6.4 本章小结 (78)第七章全文总结与展望 (79)7.1 全文总结 (79)7.2 后续工作展望 (80)致谢 (81)参考文献 (82)攻读硕士学位期间取得的成果 (87)VI第一章绪论第一章绪论1.1 研究工作的背景与意义上世纪60年代初,工业机器人和自主移动机器人成为现实,为实现大规模自动化生产,降低制造成本提升产品质量做出了巨大贡献。
《双足机器人步态规划与控制研究》篇一一、引言随着科技的飞速发展,双足机器人逐渐成为机器人领域的研究热点。
步态规划与控制作为双足机器人的核心技术,其研究对于提高机器人的运动性能、稳定性和灵活性具有重要意义。
本文将就双足机器人步态规划与控制的研究进行深入探讨,以期为相关领域的研究者提供一定的参考。
二、双足机器人步态规划1. 步态规划的基本概念步态规划是指为双足机器人设计合理的行走方式,使其能够模拟人类行走的姿态和动作。
步态规划的目的是使机器人能够在各种环境下稳定行走,同时保持一定的运动速度和灵活性。
2. 步态规划的方法目前,双足机器人的步态规划方法主要包括基于规则的方法、基于优化的方法和基于学习的方法。
基于规则的方法是通过设定一系列规则来控制机器人的行走,如基于零力矩点的步态规划方法;基于优化的方法是通过优化算法来寻找最优的步态,如基于遗传算法的步态优化;基于学习的方法则是通过机器学习技术来使机器人学习人类的行走方式。
3. 步态规划的挑战与解决方案在步态规划过程中,需要解决的主要问题是机器人的稳定性和灵活性。
为了解决这些问题,研究者们提出了多种方法,如采用多级控制系统、引入力反馈技术、优化机器人的结构等。
此外,还需要考虑机器人的运动范围、能耗等问题,以实现高效的步态规划。
三、双足机器人控制技术1. 控制系统的基本构成双足机器人的控制系统主要包括传感器、控制器和执行器。
传感器用于获取机器人的状态信息,如位置、速度、力等;控制器根据传感器的信息对机器人的运动进行规划和控制;执行器则负责驱动机器人的关节运动。
2. 控制算法的研究与应用常见的双足机器人控制算法包括PID控制、模糊控制、神经网络控制等。
PID控制算法简单易行,适用于大多数情况;模糊控制则能够处理不确定性和非线性问题;神经网络控制则能够模拟人类的思维过程,使机器人具有更高的智能性。
在实际应用中,需要根据机器人的具体需求和环境选择合适的控制算法。
双足机器人的运动控制技术双足机器人是近年来机器人技术领域的研究热点之一。
它们模拟人类的双腿结构,通过精密的控制算法和传感器技术实现步行、奔跑等运动能力。
本文将介绍双足机器人的运动控制技术及其应用。
一、传感器技术在双足机器人运动控制中的应用传感器技术在双足机器人的运动控制中起到了至关重要的作用。
双足机器人需要通过感知周围环境和自身状态来做出相应的动作调整。
常用的传感器包括惯性测量单元(IMU)、摄像头、压力传感器等。
惯性测量单元测量机器人的加速度和角速度,用于判断机器人的姿态;摄像头可以感知周围的视觉信息,例如识别障碍物、安全轨迹等;而压力传感器则可以监测机器人脚底的压力分布情况,用于平衡控制和稳定性调整。
通过这些传感器技术,双足机器人可以实时获取环境和自身状态的信息,并根据此信息进行运动控制的决策和调整。
二、基于力触觉的运动控制技术除了传感器技术,基于力触觉的运动控制技术也是双足机器人中的重要一环。
通过力触觉传感器,机器人可以感知到外界的接触力和力矩,从而做出相应的动作调整。
在步行过程中,双足机器人需要保持平衡并适应地面的不平整情况。
通过力触觉传感器获取足底与地面的接触力信息后,机器人可以根据不同地面情况进行步态调整,比如调整步长、踩踏力度等,以保持平衡和稳定性。
此外,在运动中碰到障碍物时,双足机器人通过力触觉传感器感知到的碰撞力可以触发反应机制,避免受到伤害或继续运动。
这种基于力触觉的运动控制技术为双足机器人增加了应对外界情况的能力。
三、运动规划与控制算法运动规划与控制算法是双足机器人运动控制的核心。
它们决定了机器人在实际运动中的姿态、步态以及动作顺序。
在步行中,双足机器人需要根据目标位置、环境约束等进行运动规划。
常用的算法包括最优控制、模型预测控制等,可以通过优化目标函数,如能耗、速度等,来生成最优的运动轨迹。
控制算法则负责实时调整机器人的动作参数,以保持平衡稳定。
PID控制器、模糊控制器等经典的控制算法被广泛应用于双足机器人控制中。
《双足机器人步态规划与控制研究》篇一一、引言随着科技的不断进步,双足机器人已经成为现代机器人技术研究的热点之一。
双足机器人以其类似人类的行走方式,具有更高的灵活性和适应性,在服务、救援、军事等领域具有广泛的应用前景。
然而,要实现双足机器人的稳定行走,需要进行步态规划和控制研究。
本文旨在探讨双足机器人步态规划与控制的相关问题,以期为双足机器人的研究与应用提供一定的理论依据和技术支持。
二、双足机器人步态规划步态规划是双足机器人行走的基础,它决定了机器人的行走方式、速度和稳定性。
目前,常见的步态规划方法包括基于规则的方法、基于优化的方法和基于学习的方法。
1. 基于规则的步态规划基于规则的步态规划是根据预先设定的规则和逻辑,使机器人按照一定的步态行走。
这种方法简单易行,但需要针对不同的环境和任务进行规则调整,具有一定的局限性。
针对双足机器人的步态规划,需要考虑到机器人的身体结构、关节运动范围、地面情况等因素,制定出合适的步态规划规则。
2. 基于优化的步态规划基于优化的步态规划是通过建立数学模型,利用优化算法求解最优的步态。
这种方法可以根据机器人的任务和环境变化,自动调整步态参数,具有更好的适应性和灵活性。
常见的优化算法包括遗传算法、粒子群算法、动态规划等。
3. 基于学习的步态规划基于学习的步态规划是通过学习人类或其他生物的行走方式,使机器人模仿或自主学习步态。
这种方法需要大量的学习数据和计算资源,但可以使机器人具有更高的智能和灵活性。
常用的学习方法包括深度学习、强化学习等。
三、双足机器人控制研究双足机器人的控制是实现稳定行走的关键。
目前,常见的控制方法包括基于模型的控制、基于学习的控制和混合控制。
1. 基于模型的控制基于模型的控制是根据机器人的运动学和动力学模型,利用控制器对机器人进行控制。
这种方法需要建立准确的模型,并针对不同的任务和环境进行调整。
常见的控制器包括PID控制器、模糊控制器、神经网络控制器等。
机器人双足步态控制方法的研究与实现第一章绪论在过去几年中,机器人技术得到了长足的发展,已经越来越多地应用于制造业、医疗、军事、物流等领域。
与此同时,双足机器人也在逐渐增加相关应用领域。
随着科技的发展,双足机器人已经成为人类研究和开发的核心领域之一。
在人机交互方面,双足机器人可以更好地模仿人类步态,同样双足机器人也可以在危险的环境中或已经不适用于人类的环境中工作,如铁路维护、搜救行动和灾难应对等。
在双足机器人应用领域中,步态控制是一个非常重要的研究方向。
如何建立双足机器人的步态并对其控制,就是该领域的重要研究内容之一,是该领域研究的重点。
本文旨在对双足机器人步态控制方法的研究和实现进行分析和探讨。
第二章双足机器人步态控制的相关研究现状步态控制是双足机器人研究领域的重点,其研究现状主要包括以下方面:2.1 基本控制方法双足机器人的步态控制主要有两种基本方法:一种是基于动力学模型的控制方法,一种是基于模糊理论的控制方法。
基于动力学模型的控制方法,可以通过建立系统的动力学模型、控制器模型和仿真系统模型来实现。
基于模糊理论的控制方法,其主要特点是可以提高系统的自适应性和鲁棒性,从而提高系统的运动稳定性。
这种方法主要应用于模糊控制算法中,可以较好地解决系统中的死区和不确定性问题。
2.2 步态规划方法双足机器人的步态规划方法主要有基于参数曲线、基于较多来源等多种方法。
基于参数曲线的步态规划方法可以将双足机器人的运动轨迹细分为不同的部分并进行分析,从而得到实现步态控制的参数和条件。
基于多方面来源的步态规划方法则可以充分利用不同信息来源,如IMU、视觉甚至声音等,从而达到更为精确的运动控制效果。
2.3 双足机器人的步态仿真和实验研究在步态仿真和实验研究中,通常使用一些经典的运动过程和PID控制,通过建立双足机器人的运动模型,使用MATLAB、Simulink等工具进行建模和仿真,实现对双足机器人的控制和仿真操作。
仿人机器人两足动态行走研究1.本文概述随着技术的飞速发展,仿人机器人已成为机器人领域的一个重要研究方向。
两足动态行走作为仿人机器人的核心技术之一,不仅影响机器人的稳定性和灵活性,还直接影响其在复杂环境中的适应性。
本文旨在深入探讨仿人机器人的两足动态行走技术,分析现有技术的优缺点,提出一种新的两足动态步行控制策略。
本文将从步态生成、平衡控制、能量优化等方面对目前仿人机器人两足动态行走的研究成果进行详细回顾和总结。
本文将分析现有技术在实际应用中面临的问题和挑战,如对复杂地形的适应性、行走稳定性、能量效率等。
针对这些问题,本文将提出一种基于生物力学原理和先进控制算法的两足动物动态行走控制策略。
该策略旨在提高仿人机器人在不同环境中的行走稳定性和适应性,同时优化能耗。
该研究不仅有助于仿人机器人两足动态行走技术的发展,也为机器人在复杂环境中的应用提供了新的思路和方法。
通过本研究,有望为仿人机器人的发展做出贡献,并为相关研究和实际应用提供参考。
2.仿人机器人两足动态行走的理论基础仿人机器人两足动态行走研究是机器人领域的一个重要分支,涉及机械工程、电子工程、控制理论、计算机科学和生物力学等多个学科的交叉与融合。
本节将详细介绍两足动态行走的理论基础,为后续研究奠定坚实的理论基础。
两足行走的生物力学原理是研究人类行走模式的基础,对仿人机器人行走系统的设计具有重要的指导意义。
人类行走的生物力学特征包括行走周期、步态分析、关节运动学、肌肉动力学等。
通过深入研究这些原理,我们可以更好地理解人类行走的复杂性,并将其应用于机器人设计。
在两足行走过程中,保持动态平衡和稳定性对人形机器人至关重要。
动态平衡涉及机器人在运动过程中对外部干扰的响应能力,而稳定性控制确保机器人在各种行走条件下保持平衡状态。
这需要综合考虑机器人的质量分布、关节刚度和地面条件等因素,并通过先进的控制算法实现。
步态规划是指为机器人设计合适的行走模式,使其高效稳定地行走。
英文回答:The simulation of multi—foot walking robots as living robots is key to achieving multiple tasks。
In practice, step control is one of the most important techniques for multi—foot walking robots。
Studying step—control methods can help optimize robots ' walking stability, speed and energy consumption and improve their adaptive capacity inplex environments。
Currently,step—control methods for multi—foot walking robots cover many areas, including mechanical engineering, control theory, biomimicry andputer science。
多足步行机器人作为一种仿生机器人,其步行方式的模拟是完成多种任务的关键。
在实践中,步态控制是多足步行机器人最重要的技术之一。
研究步态控制方法可以帮助优化机器人的步行稳定性、速度和能耗,提高其在复杂环境中的适应能力。
当前,针对多足步行机器人的步态控制方法研究涵盖了许多领域,包括机械工程、控制理论、仿生学和计算机科学等。
The study of step—control methods is mainly concerned with three aspects: planning robot walking, optimizing robot walking and stabilizing the balance of robot walking。
1 引言机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的各个领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面面。
对于步行机器人来说,它只需要模仿人在特殊情况下(平地或己知障碍物)完成步行动作,这个条件虽然可以使机器人的骨骼机构大大降低和简化,但也不是说这个系统就不复杂了,其步行动作一样是高度自动化的运动,需要控制机构进行复杂而巧妙地协调各个关节上的动作。
双足机器人的研究工作开始于上世纪60年代末,只有三十多年的历史,然而成绩斐然。
如今已成为机器人领域主要研究方向之一。
最早在1968年,英国的Mosher.R 试制了一台名为“Rig”的操纵型双足步行机器人[1],揭开了双足机器人研究的序幕。
该机器人只有踝和髋两个关节,操纵者靠力反馈感觉来保持机器人平衡。
1968~1969年间,南斯拉夫的M.Vukobratovic提出了一种重要的研究双足机器人的理论方法,并研制出全世界第一台真正的双足机器人。
双足机器人的研制成功,促进了康复机器人的研制。
随后,牛津大学的Witt等人也制造了一个双足步行机器人,当时他们的主要目的是为瘫痪者和下肢残疾者设计使用的辅助行走装置。
这款机器人在平地上走得很好,步速达0.23米/秒。
日本加藤一郎教授于1986年研制出WL-12型双足机器人。
该机器人通过躯体运动来补偿下肢的任意运动,在躯体的平衡作用下,实现了步行周期1.3秒,步幅30厘米的平地动态步行。
法国Poitiers大学力学实验室和国立信息与自动化研究所INRIA机构共同开发了一种具有15个自由度的双足步行机器人BIP2000,其目的是建立一整套具有适应未知条件行走的双足机器人系统。
它们采用分层递解控制结构,使双足机器人实现站立、行走、爬坡和上下楼梯等。
此外,英国、苏联、南斯拉夫、加拿大、意大利、德国、韩国等国家,许多学者在行走机器人方面也做出了许多工作。
国内双足机器人的研制工作起步较晚。