《汽车车身控制系统》第5章汽车数据总线传输系统
- 格式:ppt
- 大小:14.71 MB
- 文档页数:64
班级:姓名:学号:评定:
班级:
姓名: 学号: 评定:
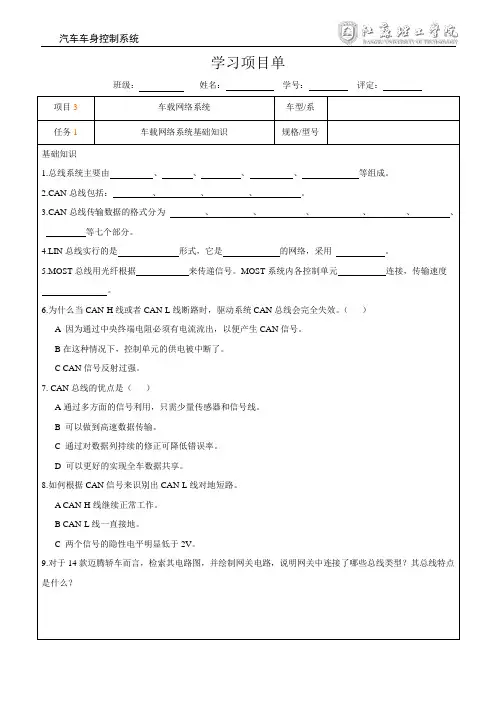
学习项目单
班级:
姓名: 学号: 评定:
)CAN-H对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-H与CAN-L互短模式下CAN波形图采集与绘制(注意周期、幅值标注)
)CAN-L对地短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注))CAN-L对正极短路工作模式下CAN波形图采集与绘制(注意周期、幅值标注)
3.LIN线正常工作模式下波形图采集与绘制(注意周期、幅值标注)
线工作模式下波形图采集与绘制(注意周期、幅值标注)
学习项目单
班级:
姓名: 学号: 评定:。
汽车车载网络技术详解(修订版)习题库第一章车载网络系统基础知识 (1)第二章CAN总线传输系统 (4)第三章子总线系统 (7)第四章网关与诊断总线 (9)第五章光学总线系统 (10)第六章以太网与FlexRay总线 (13)第七章大众奥迪车系车载网络系统 (15)第八章丰田多路通信系统 (16)第九章通用车系车载网络系统 (18)第十章汽车车载网络系统检修 (19)第十一章车联网 (20)第一章车载网络系统基础知识一、填空题1.导线长度和插接器数量的增加不但占据车内的有效空间、增加装配和维修的难度、提高整车成本,而且妨碍整车可靠性的提高。
2.车载电控系统经历了中央电脑集中控制、多电脑分散控制和网络控制三个阶段。
3.数据传输总线,就是指在一条数据线上传递的信号可以被多个系统共享,从而最大限度地提高系统整体效率,充分利用有限的资源。
4.通过接口连接不同设备时有点对点连接和多点连接两种连接方式。
5.如果将传输路径的控制功能主要分配给其中一个设备,则该设备就变为主控控制单元,而其他设备仅具有副控功能,因而,具有副控功能的这些设备亦称从属控制单元。
6.协议三要素是指语法、语义和定时规则。
7.总线上的比特编码(比特表示)可以通过非归零法(NRZ)、曼彻斯特法和脉冲宽度调制法(PWM)实现。
8.车用网络大致可以分为4个系统:动力传动系统、车身系统、安全系统、信息系统。
二、选择题1.以下(A )不是车载网络系统组成。
A.传输媒体B.拓扑结构C.通信协议D.数据总线2.通过一个转发器将每台入网计算机接入网络,每台转发器与相邻两台转发器用物理链路相连,此为(A )。
A.环形网拓扑结构B.星形网拓扑结构C.总线形网拓扑结构D.三角形网拓扑结构3.以一台称之为中心处理机为主组成的网络,各种类型的入网机均与该中心处理机有物理链路直接相连,此为( B )。
A.环形网拓扑结构B.星形网拓扑结构C.总线形网拓扑结构D.三角形网拓扑结构4.将所有的入网计算机通过分接头接入一条载波传输线上,此为(C )。
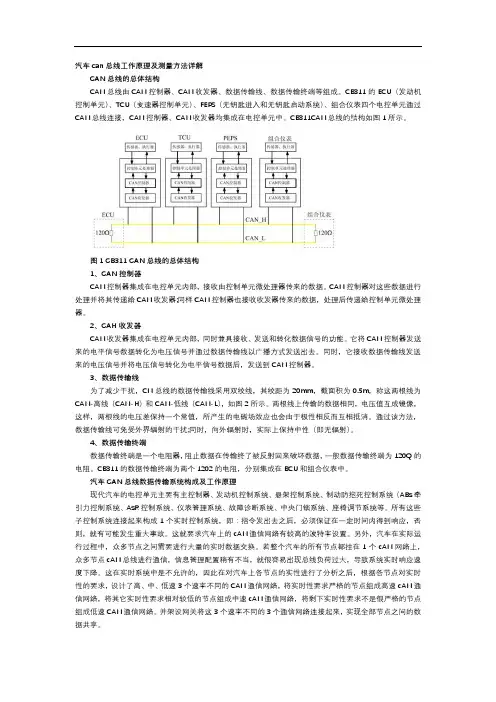
汽车can总线工作原理及测量方法详解CAN总线的总体结构CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。
CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、FEPS(无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。
CB311CAN总线的结构如图1所示。
图1 CB311 CAN总线的总体结构1、CAN控制器CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。
CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。
2、CAH收发器CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。
它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。
同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。
3、数据传输线为了减少干扰,CN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5m,称这两根线为CAN-高线(CAN-H)和CAN-低线(CAN-L),如图2所示。
两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。
通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。
4、数据传输终端数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Q的电阻。
CB311的数据传输终端为两个1202的电阻,分别集成在BCU和组合仪表中。
汽车CAN总线数据传输系统构成及工作原理现代汽车的电控单元主要有主控制器、发动机控制系统、悬架控制系统、制动防抱死控制系统(ABs牵引力控制系统、AsR控制系统、仪表管理系统、故障诊断系统、中央门锁系统、座椅调节系统等。
汽车车身CAN总线系统设计作者:郝魁孙华伟腾彦飞来源:《科技与创新》2014年第07期摘要:随着现代汽车电子技术的发展与广泛应用,汽车车身的电子设备越来越多,各部分通信控制之间更为复杂。
传统电器之间的连接使用点对点方式的单一通信,而使用CAN总线技术使车身电控系统之间的连接更加智能化。
车身使用的是低速的CAN总线网络,对于车身整体控制性要求较低。
车身控制一般包括对门锁、前后视镜、天窗、室内空调等的控制。
关键词:汽车;车身控制;CAN总线;电子技术中图分类号:U469.11 文献标识码:A 文章编号:2095-6835(2014)07-0001-02CAN总线技术主要应用于动力系统子网和车身系统子网,我们研究的车身网络控制属于低速CAN网络。
随着CAN总线技术的广泛应用,其开发流程与方法成为了研究的重点。
基于CAN总线技术的车身控制代替了车身点对点的复杂连接,使用CAN总线式网络拓扑形式,将车身各个控制节点连接,利用软件实现对车身网络节点的综合控制。
1 汽车网络总线开发流程CAN总线技术在车身的广泛应用,使人们更加关注CAN总线的整体开发流程。
车身CAN总线网络的开发流程主要包括系统整体设计和具体实现方法。
系统整体网络设计包括了所有要遵循的设计方法。
使用网络拓扑形式的设计方法时,首先要分析CAN总线的系统功能要求、整体结构的设计与仿真,制订符合CAN总线要求的通信与控制协议,这样才能为供货商提供整车ECU节点设计(包括软件节点、硬件节点、软件与硬件结合节点的系统集成),完成CAN总线的验证与仿真。
具体实现方法包括实现这些功能所需要的硬件和软件的选型与设计。
2 车身CAN总线系统的拓扑结构设计车身网络系统拓扑结构主要包括中央控制器、左右前后车门控制器、车内空调控制器、前后座控制器等,这些控制器都挂接在CAN总线上。
这里我们选择中央控制模块进行研究。
车身网络控制选择的是低速通信,因此传输波特率选择50 kb/s作为CAN总线的通信速率。


1 引言随着汽车电子技术的不断发展,汽车上的各种电子装置越来越多,电子控制装置之间的通讯也越来越复杂,而汽车上传统的电气系统大多采用点对点的单一通信方式,相互之间少有联系,造成了庞大的布线系统,已远远不能满足汽车愈加复杂的控制系统要求。
汽车控制局域网CAN 总线应运而生,它广泛应用于汽车电子控制系统中,为实现汽车控制部件的智能化和汽车控制系统的网络化提供了一个有效的途径和方法。
2 CAN总线技术简介CAN 总线是德国BOSCH 公司从20 世纪80 年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。
通信速率可达1Mb/s.CAN 总线通信接口中集成了CAN 协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
CAN 协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码,最多可标识2048(2.0A)个或5 亿(2.0B)多个数据块。
采用这种方法的优点可使网络内的节点个数在理上受限制。
数据段长度最多为8 个字节,不会占用总线时间过长,从而保证了通信的实时性。
CAN 协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
3 系统设计思想汽车车身系统的控制对象包括:4个车门锁、2个以上车窗玻璃升降器、行李箱锁、除霜加热器、电动后视镜、前后大灯、小灯、转向灯、危险灯、雾灯、牌照灯、车内阅读灯、车厢顶灯等。
在具备遥控功能的情况下,还包括对遥控信号的接收处理和防盗系统的控制。
因此,根据以上要完成的各功能,将本系统设计为5个子模块,分别是中央控制模块(实现中控门锁、防盗、雨刮、内外灯和后窗及后视镜加热等功能),4个门控模块(分别为主驾门模块、右前门模块、左后门模块、右后门模块,来控制车窗升降器和门锁)。
图1给出了车身控制模块CAN总线结构。
汽车总线原理
汽车总线是一种用于汽车电子系统中的通信协议,它允许车辆中的各种电子设备和传感器之间进行数据交换。
总线系统通过共享一条物理通信线路,可以同时传输多个设备之间的数据和控制信号。
这种通信架构减少了电缆数量,简化了系统的设计和安装,提高了系统的可靠性和扩展性。
汽车总线系统通常由控制器区域网络(CAN)实现。
CAN总
线采用了分布式通信的方式,可以连接多个ECU(电子控制
单元),例如发动机控制单元、制动系统控制单元、空调控制单元等。
每个ECU通过CAN总线发送和接收数据,数据可
以是传感器的测量值、控制信号或者其他设备之间的通信信息。
CAN总线的通信协议是基于现场总线技术的。
每个ECU都有
一个唯一的标识符(ID),用于确定消息的发送者和接收者。
发送者将消息封装在CAN帧中,其中包含标识符、数据和其
他控制信息。
CAN帧通过总线传输,并根据标识符进行过滤
和路由,只有与标识符匹配的ECU才能接收到该消息。
这种
广播式的通信方式可以让多个设备同时接收到相同的消息,实现实时共享数据。
除了CAN总线,汽车电子系统还可以使用其他总线协议,如
局域网(LIN)总线和媒体面板总线(MOST)。
LIN总线主
要用于低速数据传输,例如车门控制系统、灯控制系统等。
MOST总线则用于音频和娱乐系统,可以连接车载娱乐设备、音响系统等。
总的来说,汽车总线是一种具备高效、可靠和灵活特性的通信系统。
它在车辆电子系统中起着关键作用,实现了各种设备之间的数据交换和协同工作,为车辆提供了更多功能和可靠性。
汽车数据总线的名词解释汽车数据总线是指在电子汽车系统中,用于传输各种数据的系统,类似于人体的神经系统。
它通过连接不同的电子控制单元(ECU),使得车辆各系统之间能够相互通信和交换信息。
汽车数据总线的出现使得汽车电子系统更加智能化和集成化,从而提升了汽车性能和安全性。
1. CAN总线(Controller Area Network,控制器局域网)CAN总线是汽车领域最常用的一种数据总线,它具有高可靠性和抗干扰能力。
CAN总线采用串行通信方式,可以同时传输多个控制器的数据,减少了多个控制器之间的连线数量,节省了空间和成本。
CAN总线广泛应用于车身控制、发动机管理、制动系统等重要汽车系统。
2. LIN总线(Local Interconnect Network,局部互联网络)LIN总线是一种低成本、低速率的数据总线,主要用于车内非关键系统的通信。
相较于CAN总线,LIN总线通信速率较慢,但成本更低。
它常被用于控制车辆的悬挂系统、座椅调节、窗户升降等功能。
LIN总线可以通过数据传输,实现对车内多个设备的控制和监控。
3. FlexRay总线FlexRay总线是一种高速数据总线,可用于高度复杂的汽车系统,如车辆稳定性控制和自动驾驶等领域。
FlexRay总线具有高可靠性和带宽,能够实现大规模的实时通信。
它通过采用时间分割多路访问技术(TDMA)和冗余通信,提供了更高的冗余容错能力,保证了车辆系统的可靠性和安全性。
4. MOST总线(Media Oriented Systems Transport,介质导向系统传输)MOST总线是一种用于车载多媒体通信的高速光纤总线,主要用于音频、视频和数据的传输。
它支持高速传输,确保了音视频信号的高质量传输。
MOST总线广泛应用于车载导航、音响系统、后座娱乐系统等多媒体设备。
5. Ethernet总线以太网总线是一种在汽车电子系统中越来越常见的数据总线。
由于其高带宽和广泛应用的特点,以太网总线被用于实现车辆内部各个子系统(如传感器、驾驶员辅助系统等)之间的高速数据交换。