基于51单片机的交通灯C语言程序设计
- 格式:doc
- 大小:69.50 KB
- 文档页数:5
#include<reg52.h>#define uint unsigned int#define uchar unsigned charchar TAB[11]={0x5f,0x44,0x9d,0xd5,0xc6,0xd3,0xdb,0x45,0xdf,0xd7,0x00}; //数码管状态表void delay_100ms(uint );void delay(uint );void display(uint );void yejian(void);int i,k,t,flag=0;sbit A1=P1^0;sbit A2=P1^1;sbit A3=P1^2;sbit A4=P1^3;sbit SB=P3^7;void main () //主程序{EA=1;//初始化,开所有中断ET1=1;//开定时器T1中断TMOD=0x10;//设置定时器工作方式2TH1=(65536-50000)/256;//设置定时器初值TL1=(65536-50000)%256;while(1){if(SB==0) flag=1;if(flag==1) yejian();P2=0x69;k=8;while(k>0)//状态1南北红灯,东西绿灯{if(SB==0) flag=1;if(flag==1) yejian();TR1=1;//开启T1while(t!=10) display(k); //显示倒计时if(t==10) t=0;k--;TR1=0;//关闭T1}if(k==0) k=3;while(k>=0)//状态2南北红灯,东西绿灯闪烁三次{if(SB==0) flag=1;if(flag==1) yejian();P2=0x69;delay_100ms(5);P2=0x41;delay_100ms(5);k--;}k=2;flag=1;while(k>=0)//状态3南北红灯,东西黄灯{if(SB==0) flag=1;if(flag==1) yejian();P2=0x7d;delay_100ms(10);k--;}P2=0x96;k=8;while(k>0)//状态4南北绿灯,东西红灯{if(SB==0) flag=1;if(flag==1) yejian();TR1=1;//开启T1while(t!=10) display(k);// 显示倒计时if(t==10) t=0;k--;TR1=0;//关闭T1}k=3;while(k>=0)//状态5东西红灯,南北绿灯闪烁三次{if(SB==0) flag=1;if(flag==1) yejian();P2=0x96;delay_100ms(5);P2=0x14;delay_100ms(5);k--;}k=2;while(k>=0)//状态6东西红灯,南北黄灯{if(SB==0) flag=1;if(flag==1) yejian();P2=0xd7;delay_100ms(10);k--;}}}void yejian(void){uint m=k;while(flag==1){if(SB==1) flag=0;k=11;P2=0xff;delay_100ms(5);P2=0x00;delay_100ms(5);}k=m;}void delay_100ms(uint z)//显示数码管延时100ms {TR1=1;//开启T1while(t!=z) display(k);if(t==z){t=0;TR1=0;//关闭T1}}void exter0() interrupt 3//定时器中断程序{TH1=(65536-50000)/256;TL1=(65536-50000)%256;t++;}void display(uint i)//倒计时显示{A1=A2=A3=A4=0;A4=1;P0=TAB[i];//显示第一位数值delay(4);A4=0;A3=1;P0=TAB[i];//显示第二位数值delay(4);A3=0;A2=1;P0=TAB[i];//显示第三位数值delay(4);A2=0;A1=1;P0=TAB[i];//显示第四位数值delay(4);A1=0;}void delay(uint z)//软件延时{uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}。
#include <reg51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit SH_CP=P2^0;sbit DS=P2^1;sbit ST_CP=P2^2;uchar temp;uchar code DSY_CODE[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff}; void NB_tong();void DX_tong();void NBY_show();void DXY_show();sbit RED_A=P1^0;//A代表NB南北sbit YELLOW_A=P1^1;sbit GREEN_A=P1^2;sbit RED_B=P1^3;//B代表DX东西sbit YELLOW_B=P1^4;sbit GREEN_B=P1^5;sbit K1=P3^0;sbit K2=P3^1;sbit K3=P3^3;sbit SPK=P3^7;//蜂鸣器uchar time=0,Count=0;//--------------------------------//延时//--------------------------------void DelayMS(uint x){uchar t;while(x--) for(t=0;t<120;t++);}//---------------------------------------//74HC595的驱动//---------------------------------------void In_595(){uchar i;for(i=0;i<8;i++){temp<<=1;DS=CY;SH_CP=1;_nop_();_nop_();SH_CP=0;}void Out_595(){ST_CP=0;_nop_();ST_CP=1;_nop_();ST_CP=0;}//---------------------------------------//T0定时器定时及各种情况下灯亮的调用//---------------------------------------void Timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;Count++;time=time%60;if(Count==20){time++;Count=0;}if(time<=30) NB_tong();if((time>30)&&(time<=35)) NBY_show();if((time>35)&&(time<=55)) DX_tong();if((time>55)&&(time<=60)) DXY_show();}//------------------------------------//按键处理//------------------------------------void EX_INT0() interrupt 0{if(K1==0) //K1按下强制NB南北通行,倒计时黑屏暂停;断开继续以前动作。
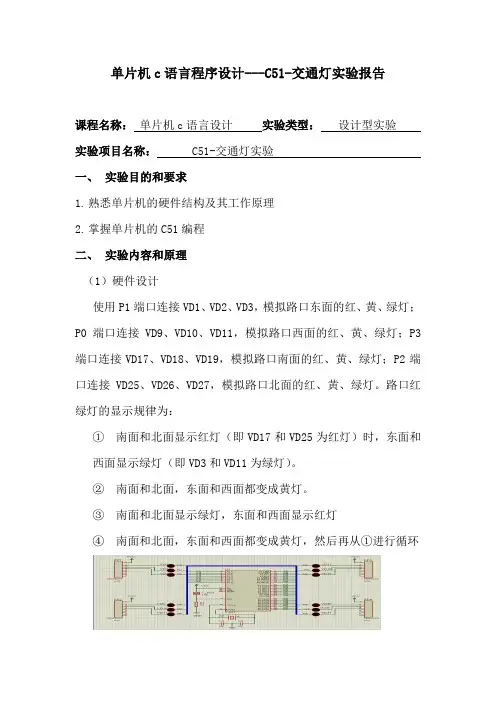
单片机c语言程序设计---C51-交通灯实验报告课程名称:单片机c语言设计实验类型:设计型实验实验项目名称: C51-交通灯实验一、实验目的和要求1.熟悉单片机的硬件结构及其工作原理2.掌握单片机的C51编程二、实验内容和原理(1)硬件设计使用P1端口连接VD1、VD2、VD3,模拟路口东面的红、黄、绿灯;P0端口连接VD9、VD10、VD11,模拟路口西面的红、黄、绿灯;P3端口连接VD17、VD18、VD19,模拟路口南面的红、黄、绿灯;P2端口连接VD25、VD26、VD27,模拟路口北面的红、黄、绿灯。
路口红绿灯的显示规律为:①南面和北面显示红灯(即VD17和VD25为红灯)时,东面和西面显示绿灯(即VD3和VD11为绿灯)。
②南面和北面,东面和西面都变成黄灯。
③南面和北面显示绿灯,东面和西面显示红灯④南面和北面,东面和西面都变成黄灯,然后再从①进行循环(需注意:此处设置的黄灯显示时长应短于红灯或绿灯的显示时长)(2)protues仿真通过Keil编译后,利用protues软件进行仿真。
在protues ISIS 编译环境中绘制仿真电路图,将编译好的“xxx.hex”文件加入AT89C51。
启动仿真,观察仿真结果。
三、主要仪器设备四、操作方法与实验步骤1.按照硬件设计在protues上按照所给硬件设计绘制电路图。
2.在keil上进行编译后生成“xxx.hex”文件。
3.编译好的“xxx.hex”文件加入AT89C51。
启动仿真,观察仿真结果。
五、实验结果与分析void S_N(void){VD1=0;VD9=0;VD19=0;VD27=0;Delay(1000);VD1=1;VD9=1;VD19=1;VD27=1;}int main (void) {while(1){E_W();NOT();S_N();NOT();}}六、讨论和心得。

xxxxxxxxx基于AT89S52交通灯设计学院:电子信息工程专业班级: xxxxxxxxxxxxxx姓名: xx xx学号: xxxxxxxxxxx指导老师: xxxxxxxxxx摘要交通灯在我们日常生活中随处可见,它在交通系统中处于至关重要的位置。
交通灯的使用大大减少了交通繁忙路口的事故发生,给行人和车辆提供一个安全的交通环境,人们的生命和财产安全有了保障。
本设计旨在模拟十字路口的交通灯,以AT89S51单片机为基础,结合按键和数码管等元器件设计出一个简单且完全的交通灯系统。
关键词:交通灯 AT89S52 单片机目录一、设计任务 (4)二、AT89S52单片机及其他元器件简介 (4)(1)AT89S52单片机 (4)三、系统硬件电路设计 (6)(1)时钟电路设计 (6)(2)复位电路设计 (6)(3)灯控制电路设计 (7)(4)按键控制电路设计 (7)四、元件清单及实物图 (8)1、程序清单 (8)2、原理图 (9)五、实验心得 (9)附1 源程序代码 (10)附2 原理图 (16)一、设计任务(1)、设计一个十字路口的交通灯控制电路,要求南北方向和东西方向两条交叉道路上的车辆交替运行,每次通行时间都设30秒,时间可设置修改。
(2)、在绿灯转为红灯时,要求黄灯先亮5秒钟,才能变换运行车道,且黄灯亮时,要求每秒亮一次。
(3)、有紧急车辆要求通过时,系统要能禁止东西和南北两条路上所有的车辆通行。
二、AT89S52单片机及其他元器件简介(1)AT89S52单片机AT89S52是一种低功耗、高性能CMOS8位微控制器。
片上Flash允许程序存储器在系统可编程,亦适于常规编程器。
在单芯片上,拥有灵巧的8位CPU和在系统可编程Flash,使得AT89S52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
AT89S52具有以下标准功能:8K字节Flash,256字节RAM,32位I/O口线,看门狗定时器,2个数据指针,三个16位定时器/计数器,一个6位向量2级中断结构,全双工串行口,片内晶振及时钟电路。
51单片机用C语言实现交通灯51 单片机用C 语言实现交通灯(红绿灯)源程序交通灯,红黄绿灯交替亮,怎样实现呢?其实就是根据单片机定时器及倒计时的程序修改。
源程序如下:#include bit red,green,yellow,turnred; //定义红、黄、绿及转红标志code unsigned char tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//共阴数码管0- 9unsigned char Dis_Shiwei;//定义十位unsigned char Dis_Gewei; //定义个位void delay(unsigned int cnt) //用于动态扫描数码管的延时程序{while(--cnt);}main() {TMOD |=0x01;//定时器设置10ms in 12M crystal 定时器0,工作方式1,16 位定时器TH0=0xd8; //65535-10000=55535=D8F0(十六进制)TL0=0xf0;IE= 0x82; //中断控制,EA=1 开总中断,ET0=1:定时器0 中断允许TR0=1; //开定时器0中断P1=0xfc;//红灯亮,根据红黄绿接灯的顺序。
red =1;while(1) {P0=Dis_Shiwei;//显示十位,这里实现用8 位数码管,即左1 位P2=0;delay(300); //短暂延时P0=Dis_Gewei; //显示个位,左数,2 位P2=1;delay(300);}}void tim(void) interrupt 1 using 1{static unsigned char second=60,count; //初值60TH0=0xd8;//重新赋值,10 毫秒定时TL0=0xf0;count++;if (count==100) {count=0;second--;//秒减1if(second==0){ //这里添加定时到0 的代码,可以是灯电路,继电器吸合等,或者执行一个程序if(red) //红灭,先转黄{red=0;yellow=1;second=4;P1=0xF3;//黄灯亮4 秒,黄灯为过渡灯,再根据情况转绿或转红}else if(yellow && !turnred){yellow=0;green=1;second=25;P1=0xCF;// 绿灯亮25 秒,}else if(green){yellow=1;green=0;second=4;P1=0xF3;//黄灯亮4 秒turnred=1;}else if(yellow && turnred) //绿灯灭,转黄灯,后红灯,turnred=1 时{red=1;yellow=0;P1=0xFC;//红灯亮60 秒second=60;turnred=0; //接下来是转黄,绿。
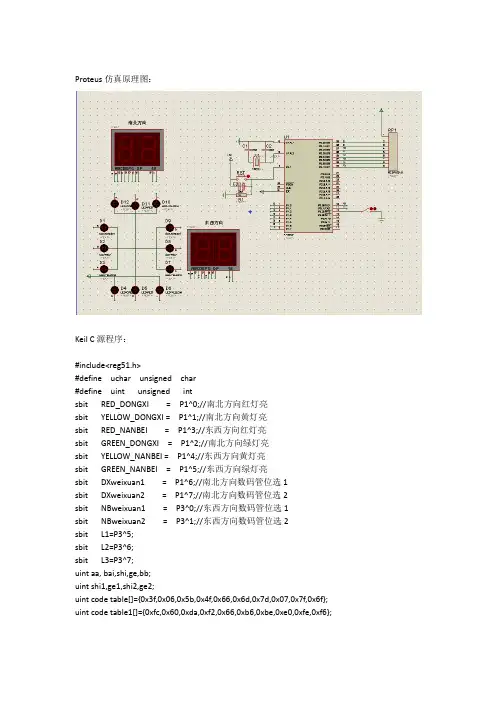
Proteus仿真原理图:Keil C源程序:#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit RED_DONGXI = P1^0;//南北方向红灯亮sbit YELLOW_DONGXI = P1^1;//南北方向黄灯亮sbit RED_NANBEI = P1^3;//东西方向红灯亮sbit GREEN_DONGXI = P1^2;//南北方向绿灯亮sbit YELLOW_NANBEI = P1^4;//东西方向黄灯亮sbit GREEN_NANBEI = P1^5;//东西方向绿灯亮sbit DXweixuan1 = P1^6;//南北方向数码管位选1sbit DXweixuan2 = P1^7;//南北方向数码管位选2sbit NBweixuan1 = P3^0;//东西方向数码管位选1sbit NBweixuan2 = P3^1;//东西方向数码管位选2sbit L1=P3^5;sbit L2=P3^6;sbit L3=P3^7;uint aa, bai,shi,ge,bb;uint shi1,ge1,shi2,ge2;uint code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; uint code table1[]={0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6};void delay(uint z);void init(uint a);void display(uint shi1,uint ge1,uint shi2,uint ge2);void xtimer0();void init1();void init2();void init3();void init4();void init5();void xint1();void xint0();void LED_ON();void LED_OFF();void main(){P0=0xFF;P1=0xFF;P2=0x00;P3=0xFF;EA=1;EX0=1;IT0=0;init1();while(1){init2();//第2个状态init3(); //第3个状态init4(); //第4个状态init5();//第5个状态}}void init1()//第一个状态:东西、南北方向均亮红灯5S {uint temp;temp=5;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_DONGXI=0; //第一个状态东西、南北均亮红灯5SRED_NANBEI=0;GREEN_DONGXI=1;GREEN_NANBEI=1;YELLOW_DONGXI=1;YELLOW_NANBEI=1;if(aa==20)//定时20*50MS=1S{aa=0;temp--;}shi1=shi2=temp/10;ge1=ge2=temp%10;if(temp==0){temp=5;break;}display(ge1,shi1,ge2,shi2);}}void init2()//第二个状态:东西亮红灯30S~5S、南北亮绿灯25~0S;{uint temp;temp=26;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_DONGXI=1;RED_NANBEI=0;GREEN_DONGXI=0;GREEN_NANBEI=1;YELLOW_DONGXI=1;//第二个状态:东西亮绿灯25S、南北亮红灯YELLOW_NANBEI=1;if(aa==20)//定时20*50MS=1S{aa=0;temp--;shi1=(temp+5)/10;ge1=(temp+5)%10;shi2=temp/10;ge2=temp%10;if(temp==0){temp=26;break;}}display(ge1,shi1,ge2,shi2);}}void init3() //第三个状态:东西绿灯变为黄灯闪5次、南北亮红灯5S {uint temp;temp=6;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_NANBEI=0;GREEN_DONGXI=1;if(aa==20)//定时20*50MS=1S{aa=0;temp--;YELLOW_DONGXI=~YELLOW_DONGXI;shi1=temp/10;shi2=shi1;ge1=temp%10;ge2=ge1;}if(temp==0){temp=6;break;}display(ge1,shi1,ge2,shi2);}}void init4()//第四个状态:东西亮绿灯25~0S,南北方向亮红灯30~5S;{uint temp;temp=26;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_DONGXI=0;RED_NANBEI=1;YELLOW_DONGXI=1;//第一个状态东西、南北均亮红灯5SGREEN_NANBEI=0;if(aa==20){aa=0;temp--;shi1=temp/10;shi2=(temp+5)/10;ge1=temp%10;ge2=(temp+5)%10;if(temp==0){temp=26;break;}}display(ge1,shi1,ge2,shi2);}}void init5()//第五个状态:东西亮红灯、南北绿灯闪5次转亮黄灯5S {uint temp;temp=6;TMOD=0x01;TH0=(65535-50000)/256;TL0=(65535-50000)%256;EA=1;ET0=1;TR0=1;while(1){RED_NANBEI=1;RED_DONGXI=0;GREEN_DONGXI=1;GREEN_NANBEI=1;if(aa==20){aa=0;temp--;YELLOW_NANBEI=~YELLOW_NANBEI;shi1=temp/10;shi2=shi2;ge1=temp%10;ge2=ge1;if(temp==0){temp=6;break;}}display(ge1,shi1,ge2,shi2);}}void display(uint shi1,uint ge1,uint shi2,uint ge2) {DXweixuan1=0;DXweixuan2=1;NBweixuan1=1;NBweixuan2=1;P0=table[ge1];delay(5);DXweixuan1=1;DXweixuan2=0;NBweixuan1=1;NBweixuan2=1;P0=table[shi1];delay(5);DXweixuan1=1;DXweixuan2=1;NBweixuan1=0;NBweixuan2=1;P0=table[ge2];delay(5);DXweixuan1=1;DXweixuan2=1;NBweixuan1=1;NBweixuan2=0;P0=table[shi2];delay(5);}void xint0() interrupt 0 {RED_NANBEI=0;RED_DONGXI=0;GREEN_NANBEI=1;GREEN_DONGXI=1;YELLOW_NANBEI=1;YELLOW_DONGXI=1;P0=0x00;NBweixuan1=0;NBweixuan2=0;DXweixuan1=0;DXweixuan2=0;delay(2);return ;}void xint1() interrupt 2 {RED_NANBEI=1;RED_DONGXI=1;GREEN_NANBEI=0;GREEN_DONGXI=0;YELLOW_NANBEI=1;YELLOW_DONGXI=1;P0=0x00;NBweixuan1=0;NBweixuan2=0;DXweixuan1=0;DXweixuan2=0;delay(2);return ;}void xtimer0() interrupt 1 {TH0=(65535-50000)/256;TL0=(65535-50000)%256;aa++;}void delay(uint z){uint x,y;for(x=0;x<z;x++)for(y=0;y<110;y++); }。
基于51单片机控制交通灯的程序设计#include<reg51.h>unsigned char code dis_7[21]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82, 0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xbf,0x89,0x8c,0x00,0xff};//共阳数码管段码unsigned char data disbuf[6]={0x00,0x00,0x00,0x00,0x00,0x00};//显示缓冲区:时分秒使用unsigned char data count_timedx[]={2,10,5,10,25}; //东西方向倒计时时间unsigned char data count_timenb[]={2,25,10,5,10}; //南北方向倒计时时间unsigned char data Hour=14,Minite=06,Second=0,Halfsec=0; //定义时钟位unsigned char xdata *ledaddr=0x2000; //锁存器选通地址unsigned char data Ms=0,Lightcode=0,Light_step,Led_step,Light_num;unsigned int dataFault_dx=0,Fault_nb=0,Fault_total=0,Countdx=0,Countnb=0;sbit p10=P1^0; //第0位数码管位控制端sbit p11=P1^1; //第1位数码管位控制端sbit p12=P1^2; //第2位数码管位控制端sbit p13=P1^3; //第3位数码管位控制端sbit p14=P1^4; //第4位数码管位控制端sbit p15=P1^5; //第5位数码管位控制端sbit p16=P1^6; //发光二极管选通sbit p17=P1^7; //按键选通sbit p33=P3^3; //k1键用于切换四种功能/******************************************************************* **********//****************************1毫秒延时函数*******************************/ void delay1ms(int t){unsigned int i,j;for(i=0;i<t;i++)for(j=0;j<120;j++);}/******************************************************************* ********//*************************键盘扫描函数****************************************/ unsigned char getkey(void) {unsigned char Yiwei;unsigned char test=0x00,tim;*ledaddr=test;if(p17==0 && tim==0) //判断是否有按键按下{p17=1;tim=1;test=0xfe;delay1ms(5);for(Yiwei=0;Yiwei<8;Yiwei++) //处理按键{*ledaddr=test;if(p17==0)break;else test=(test<<1)+1;}return Yiwei;}else if(p17==0){}else {tim=0;}}/******************************************************************* **********//************************六位LED数码管显示***********************************/void displed(unsigned int hour_shi,unsigned int hour_ge,unsigned int min_shi,unsigned intmin_ge,unsigned int sec_shi,unsigned int sec_ge){*ledaddr=dis_7[hour_shi]; //时的十位显示p10=0;delay1ms(1);p10=1;*ledaddr=dis_7[hour_ge]; //时的个位显示p11=0;delay1ms(1);p11=1;*ledaddr=dis_7[min_shi]; //分的十位显示p12=0;delay1ms(1);p12=1;*ledaddr=dis_7[min_ge]; //分的个位显示p13=0;delay1ms(1);p13=1;*ledaddr=dis_7[sec_shi]; //秒的十位显示p14=0;delay1ms(1);p14=1;*ledaddr=dis_7[sec_ge]; //秒的个位显示p15=0;delay1ms(1);p15=1;}/******************************************************************* **********//******************************发光二极管显示函数*****************************/void displight(unsigned int state){if(state==0) //状态0:各方向红灯全亮{Lightcode=0xbb;}else if(state==1) //状态1:东西绿灯亮,南北红灯亮{Lightcode=0xbe;}else if(state==2) //状态2:东西黄灯闪烁,南北红灯亮{Lightcode=0xbd;}else if(state==3) //状态3:东西红灯亮,左行亮,南北红灯亮{Lightcode=0xb3;}else if(state==4) //状态4:东西红灯亮,南北直行绿灯亮{Lightcode=0xeb;}else if(state==5) //状态5:东西红灯亮,南北黄灯闪烁{Lightcode=0xdb;}else if(state==6) //状态6:东西红灯亮,南北红灯亮,左行亮{Lightcode=0x3b;}//黄灯闪烁if((Halfsec%2)==0){if(state==2)Lightcode=0xbf; //东西闪烁if(state==5)Lightcode=0xfb; //南北闪烁}*ledaddr=Lightcode; //送交通灯显示状态p16=0;delay1ms(1);p16=1;}/******************************************************************* *********//****************************违章车辆统计函数********************************/void weizhang(void) // 红灯亮的时候是否有车通过,KL1键显示东西,KL2键显示南北 {unsigned char key1;key1=getkey(); //获得键值if((key1==0)&&(Light_step>=4)&&(Light_step<=6)) //KL1键显示南北方向违章车辆,且只在南北方向为红灯时加1{Fault_dx++;if(Fault_dx==99) //最大计数99辆{Fault_dx=0;}}else if((key1==2)&&(Light_step>=1)&&(Light_step<=3)) //KL3键显示东西方向违章车辆,且只在东西方向为红灯时加1{Fault_nb++;if(Fault_nb==99) //最大计数99辆{Fault_nb=0;}}}/******************************************************************* ********//****************************数字钟函数***********************************/void shuzizhong(void) //数字钟:KL3键调节秒,KL4键调节分,KL5键调节时 {unsigned char data key2;key2=getkey(); //获得键值if(key2==2) //调节秒,按一次KL3,则加一秒{Second++;if(Second==60)Second=0;}if(key2==3) //调节分,按一次KL4,则加一分{Minite++;if(Minite==60)Minite=0;}if(key2==4) //调节时,按一次KL5,则加一时{Hour++;if(Hour==24)Hour=0;}disbuf[0]=Second%10; //时钟显示,送缓冲区disbuf[1]=Second/10;disbuf[2]=Minite%10;disbuf[3]=Minite/10;disbuf[4]=Hour%10;disbuf[5]=Hour/10;}/******************************************************************* **********//**************修改倒计时间函数*********************************************/void change_time(void) //注意:只修改绿灯、黄灯或左行灯时间,红灯时间自动求出 {unsigned int data key3=0;key3=getkey();if(key3==4) //KL5键选择要修改东西向倒计时{Light_num++;if(Light_num>4) Light_num=0;}if(key3==5) //KL2键用于修改东西方向倒计时,加1 {count_timedx[Light_num]++;if(count_timedx[Light_num]>=99)count_timedx[Light_num]=99;}if(key3==1)//KL6键用于修改东西方向倒计时,减1 {count_timedx[Light_num]--;if(count_timedx[Light_num]<1)count_timedx[Light_num]=1;}if(key3==6) //KL7键用于修改南北方向倒计时,加1 {count_timenb[Light_num]++;if(count_timenb[Light_num]>=99)count_timenb[Light_num]=99;}if(key3==2)//KL3键用于修改南北方向倒计时,减1 {count_timenb[Light_num]--;if(count_timenb[Light_num]<1)count_timenb[Light_num]=1;}count_timedx[4]=count_timenb[2]+count_timenb[3]+count_timenb[4]; //调整,求各方向红灯时间count_timenb[1]=count_timedx[1]+count_timedx[2]+count_timedx[3]; //红灯时间=绿灯+黄灯+左行灯}/******************************************************************* *********//************************定时器/计数器t0中断函数******************************/void time_intt0(void) interrupt 1 {TH0=0x4c; //赋初值定时50msTL0=0x00;Ms++;if(Ms>9){Ms=0;Halfsec++; //计时半秒if(Halfsec==2){Halfsec=0;Second++; //计时一秒Countdx--; //东西、南北倒计时减一Countnb--;}if(Second==60){Second=0;Minite++;//计时一分}if(Minite==60){Minite=0;Hour++; //计时一小时}if(Hour==24)Hour=0;}if((Countdx==0)||(Countnb==0)) //转换交通灯显示状态{Light_step++;if(Light_step>6){Light_step=1;}if(Countnb==0)Countnb=count_timenb[Light_step];//东西为红灯,南北绿、黄、左切换if(Countdx==0)Countdx=count_timedx[Light_step];//南北为红灯,东西绿、黄、左切换}}/******************************************************************* **********//****************外部中断1服务函数********************************************/void int_1(void) interrupt 2 //数码管显示状态切换 {EX1=0; //关中断if(Led_step<4){Led_step++;}if(Led_step==4){Led_step=0;}EX1=1;//开中断}/************串行口中断服务函数*********************************************/void ser_put(void) interrupt 4 //上位机发出字符'c',则清违章记录,若发出'g',则上传违章记录{if(RI==1) //接收到上位机发出的字符{RI=0;ACC=SBUF; //取字符if(ACC=='c') //清违章记录{Fault_dx=0;Fault_nb=0;}else if(ACC=='g')//上传违章记录{Fault_total=Fault_dx+Fault_nb;SBUF=Fault_total;}}if(TI==1) //发送中断TI=0;}/******************************************************************* **********//***************8051初始化函数************************************************/void Istr(void) {/*定时器初始化*/TMOD=0x21;//定时器1工作于方式2,做波特率发生器;定时器0工作于方式1,做定时器TH1=0xfa; //产生9.6kbit/s波特率TL1=0xfa;TH0=0x4c; //50msTL0=0x00;/*串行通信初始化*/SCON=0x50;PCON=0X80|PCON;/*启动定时器,开中断*/ET1=0; //禁止定时器1中断ET0=1;TR1=1;TR0=1;IT1=1; //设置外部中断为边沿触发EX1=1;ES=1;EA=1;}/************************主函数***********************************************/ void main(void) {Istr(); //调用初始化函数Led_step=0;Light_step=0;Light_num=0;Countdx=count_timedx[0];Countnb=count_timenb[0];SBUF='s';while(1){if(Led_step==0) //显示倒计时{displed(20,(Countdx/10),(Countdx%10),20,(Countnb/10),(Countnb%10));}if(Led_step==1) //显示时钟{shuzizhong(); //调用数字钟函数displed(disbuf[5],disbuf[4],disbuf[3],disbuf[2],disbuf[1],disbuf[0]);}if(Led_step==2) //修改倒计时数{change_time(); //调用修改倒计时时间函数displed(Light_num,count_timedx[Light_num]/10,count_timedx[Light_num]%10,Light_num,count_timenb[Light_num]/10,count_timenb[Light_num]%10);}if(Led_step==3) //显示并统计违章数{weizhang(); //调用违章记录函数displed(15,Fault_dx/10,Fault_dx%10,15,Fault_nb/10,Fault_nb%10);}displight(Light_step);//显示交通灯}}/*********over*******over************over*********over*********over* ******over***/。
#include<reg52.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intbit Flag_SN_Yellow; //SN黄灯标志位bit Flag_EW_Yellow;//EW黄灯标志位uchar Time_EW;//东西方向倒计时单元uchar Time_SN;//南北方向倒计时单元uchar EW=15,SN=10,EWL=19,SNL=19; //程序初始化赋值,正常模式uchar EW1=60,SN1=40,EWL1=19,SNL1=19;//用于存放修改值的变量ucharFlag_Moden=1; //模式变量1正常模式 2 禁止南北通东西 3 禁止东西通南北 4 禁止东西南北5 夜间模式ucharFlag_key=0;uchar codetable[10]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};//1~~~~9段选码sbit HC164_Data =P0^0;sbit HC164_Clk =P0^1;sbitEW_green =P0^2;sbitEW_yellow =P0^3;sbitEW_red =P0^4;sbitSN_red =P0^5;sbitSN_green =P0^7;sbitSN_yellow =P0^6;sbitSN_RXD_red =P2^7;sbitSN_RXD_green =P2^6;sbitEW_RXD_red =P2^5;sbitEW_RXD_green =P2^4;sbit FMQ = P1^0;sbit key1 = P3^3;sbit key2 = P3^4;sbit key3 = P3^5;sbit WEI1 =P2^3; // 东西数码管第一位sbit WEI2 =P2^2; // 东西数码管第二位sbit WEI3 =P2^1; // 南北数码管第一位sbit WEI4 =P2^0; // 南北数码管第二位//ucharew=40;sn=35;//函数 delay(uchar z)//功能能延时void Delay(uchar z){uchara,b;for(a=z;a>0;a--)for(b=200;b>0;b--);}void HC_164_Set_byte(ucharduan) {uchar i;for(i=0;i<8;i++){HC164_Data =duan& 0x80;HC164_Clk =0;HC164_Clk =1;duan =duan<<1;}}void display_smg(ucharwei,ucharnum){switch(wei){case 1:WEI1=0;WEI2=1;WEI3=1;WEI4=1;HC_164_Set_byte(table[num]);break; case 2: WEI1=1;WEI2=0;WEI3=1;WEI4=1;HC_164_Set_byte(table[num]);break; case 3: WEI1=1;WEI2=1;WEI3=0;WEI4=1;HC_164_Set_byte(table[num]);break; case 4: WEI1=1;WEI2=1;WEI3=1;WEI4=0;HC_164_Set_byte(table[num]);break; default: break;}}void Display(void){ucharh,l;h=Time_EW/10;l=Time_EW;display_smg(1,h);Delay(8);display_smg(2,l); Delay(8);h=Time_SN/10;l=Time_SN; display_smg(3,h); Delay(8);display_smg(4,l); Delay(8);}void Key(){if(key1==0){ Delay(10);if(key1==0){ while(!key1); Flag_key++;if(Flag_key==1) {Flag_Moden=2;}if(Flag_key==2) {Flag_Moden=3;}if(Flag_key==3) {Flag_Moden=4;}if(Flag_key==4) {Flag_Moden=5;FMQ=1;TR0=1;}if(Flag_key==5) {Flag_EW_Yellow=0; //SN关黄灯信号位 Flag_SN_Yellow=0; //SN关黄灯信号位 FMQ=1;Flag_Moden=1;TR0=1;//启动定时Flag_key=0;}}}if(key2==0){while(!key2);Flag_Moden=2;}if(key3==0){while(!key3);Flag_Moden=3;}}void timer0(void)interrupt 1 using 1 {static uchar count;TH0=(65536-50000)/256;TL0=(65536-50000)%6;count++;if(count==10){if(Flag_SN_Yellow==1) //测试南北黄灯标志位{SN_yellow=~SN_yellow;}if(Flag_EW_Yellow==1) //测试东西黄灯标志位{EW_yellow=~EW_yellow;}}if(count==20){if(Flag_Moden==1){Time_EW--;Time_SN--;}if(Flag_SN_Yellow==1)//测试南北黄灯标志位{SN_yellow=~SN_yellow;}if(Flag_EW_Yellow==1)//测试东西黄灯标志位{EW_yellow=~EW_yellow;}count=0;}}//模式1void Zc_moshi(){//*******S0状态**********EW_RXD_red=0; //EW人行道禁止EW_RXD_green=1;//EW人行道禁止SN_RXD_red=1; //EW人行道通行SN_RXD_green=0;//SN人行道通行Flag_EW_Yellow=0; //EW关黄灯显示信号 Flag_SN_Yellow=0; //SN关黄灯显示信号Time_EW=EW; //EW=45;SN=40;Time_SN=SN;SN_green =0; //SN通行,EW红灯SN_red =1;EW_red =0;EW_green =1;while(Time_EW>5){if(key1==0 || key2==0||key3==0){//Flag_Moden=1;TR0=0;//启动定时break;}Display();}SN_yellow=0; //SN黄灯亮开始闪烁5秒 SN_green =1; //灭//*******S1状态**********Time_SN=5;while(Time_EW<=5){if(key1==0 || key2==0||key3==0){//Flag_Moden=1;TR0=0;//启动定时break;}Flag_SN_Yellow=1; //SN开黄灯信号位 Display();}//*******S2状态**********Flag_SN_Yellow=0; //SN关黄灯显示信号 SN_yellow=1; EW_RXD_red=1; //EW人行道通行SN_RXD_green=1;//SN人行道禁止EW_RXD_green=0; //EW人行道通行SN_RXD_red=0;//SN人行道禁止Time_EW=SN; //EW=45;SN=40;Time_SN=EW;SN_green=1;//南北绿灯禁止东西通行 SN_red=0; //亮EW_red=1;EW_green=0; //亮while(Time_SN>5){if(key1==0 || key2==0||key3==0){//Flag_Moden=1;TR0=0;//启动定时break;}Display();}//*******S3状态**********EW_green=1;EW_yellow=0;Time_EW=5;while(Time_SN<=5){if(key1==0 || key2==0||key3==0){TR0=0;//启动定时break;}Flag_EW_Yellow=1; //SN开黄灯信号位 Display(); }Flag_EW_Yellow=0;EW_yellow=1;}////模式2 禁止南北通东西蜂鸣器响void Jsn() {EW_green =0;EW_yellow =1;EW_red =1;SN_red =0;SN_green =1;SN_yellow =1;SN_RXD_red =0;SN_RXD_green =1;EW_RXD_red =1;EW_RXD_green =0;FMQ =~ FMQ;Delay(10);WEI1=1;WEI2=1;WEI3=1;WEI4=1;}////模式3 禁止东西通南北蜂鸣器响void Jew() {EW_green =1;EW_yellow =1;EW_red =0;SN_red =1;SN_green =0;SN_yellow =1;SN_RXD_red =1;SN_RXD_green =0;EW_RXD_red =0;EW_RXD_green =1;FMQ =~ FMQ;Delay(10);WEI1=1;WEI2=1;WEI3=1;WEI4=1; }//模式4 禁止东西南北蜂鸣器响void JEwSn(){EW_green =1;EW_yellow =1;EW_red =0;SN_red =0;SN_green =1;SN_yellow =1;SN_RXD_red =0;SN_RXD_green =1;EW_RXD_red =0;EW_RXD_green =1;FMQ =~ FMQ;Delay(10);WEI1=1;WEI2=1;WEI3=1;WEI4=1;}//模式5 夜间模式,东西南北黄灯闪烁void Yejian() {EW_green =1;//EW_yellow =1;EW_red =1;SN_red =1;SN_green =1;//SN_yellow =1;SN_RXD_red =1;SN_RXD_green =1;EW_RXD_red =1;EW_RXD_green =1;Flag_EW_Yellow=1; //SN开黄灯信号位 Flag_SN_Yellow=1; //SN开黄灯信号位}void main (){P1=0xff;P2=0xff ;P3=0xff;P0=0xff;EW_green =1;EW_yellow =1;EW_red =1;SN_red =1;SN_green =1;SN_yellow =1;SN_RXD_red =1;SN_RXD_green =1;EW_RXD_red =1;EW_RXD_green =1;WEI1=1;WEI2=1;WEI3=1;WEI4=1;IT0=1; //INT0负跳变触发TMOD=0x01;//定时器工作于方式1TH0=(65536-50000)/256;//定时器赋初值 TL0=(65536-50000)%6; EA=1; //CPU开中断总允许ET0=1;//开定时中断// EX0=1;//开外部INTO中断TR0=1;//启动定时while(1){switch(Flag_Moden) {case 1:Zc_moshi(); break; case 2:Jsn(); break;case 3: Jew();break;case 4: JEwSn();break; case 5: Yejian();break; default :break;}Key(); }}。
51单片机用C语言实现交通灯(红绿灯)源程序2009-10-29 23:00交通灯,红黄绿灯交替亮,怎样实现呢?其实就是根据单片机定时器及倒计时的程序修改。
源程序如下:/*1、程序目的:使用定时器学习倒计时红绿灯原理主要程序和倒计时一样2、硬件要求:数码管、晶振12M*/#include <reg52.h>bit red,green,yellow,turnred; //定义红、黄、绿及转红标志code unsigned char tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//共阴数码管 0-9unsigned char Dis_Shiwei;//定义十位unsigned char Dis_Gewei; //定义个位void delay(unsigned int cnt) //用于动态扫描数码管的延时程序{while(--cnt);}main(){TMOD |=0x01;//定时器设置 10ms in 12M crystal定时器0,工作方式1,16位定时器TH0=0xd8; //65535-10000=55535=D8F0(十六进制)TL0=0xf0;IE= 0x82; //中断控制,EA=1开总中断,ET0=1:定时器0中断允许TR0=1; //开定时器0中断P1=0xfc;//红灯亮,根据红黄绿接灯的顺序。
red =1;while(1){P0=Dis_Shiwei;//显示十位,这里实现用8位数码管,即左1位P2=0;delay(300);//短暂延时P0=Dis_Gewei; //显示个位,左数,2位P2=1;delay(300);}}/********************************//* 定时中断 *//********************************/void tim(void) interrupt 1 using 1{static unsigned char second=60,count; //初值60TH0=0xd8;//重新赋值,10毫秒定时TL0=0xf0;count++;if (count==100){count=0;second--;//秒减1if(second==0){ //这里添加定时到0的代码,可以是灯电路,继电器吸合等,或者执行一个程序if(red) //红灭,先转黄{red=0;yellow=1;second=4;P1=0xF3;//黄灯亮4秒,黄灯为过渡灯,再根据情况转绿或转红}else if(yellow && !turnred){yellow=0;green=1;second=25;P1=0xCF;//绿灯亮25秒,}else if(green){yellow=1;green=0;second=4;P1=0xF3;//黄灯亮4秒turnred=1;}else if(yellow && turnred) //绿灯灭,转黄灯,后红灯,turnred=1时{red=1;yellow=0;P1=0xFC;//红灯亮60秒second=60;turnred=0; //接下来是转黄,绿。
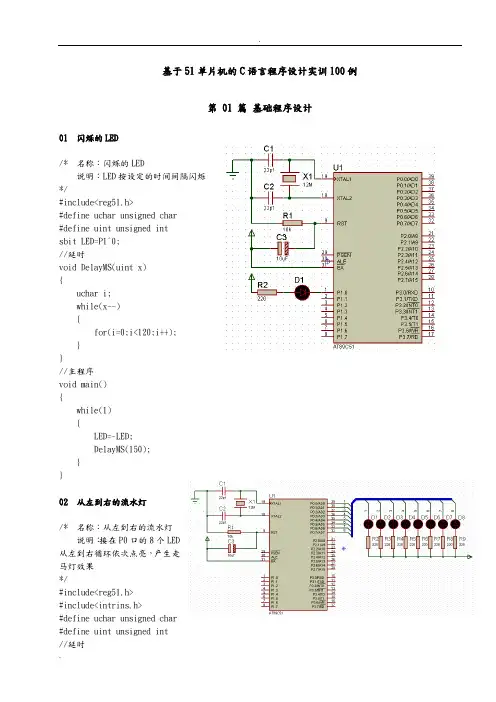
基于51单片机的C语言程序设计实训100例第 01 篇基础程序设计01 闪烁的LED/* 名称:闪烁的LED说明:LED按设定的时间间隔闪烁*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit LED=P1^0;//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){while(1){LED=~LED;DelayMS(150);}}02 从左到右的流水灯/* 名称:从左到右的流水灯说明:接在P0口的8个LED从左到右循环依次点亮,产生走马灯效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intvoid DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0的值向左循环移动DelayMS(150);}}03 8只LED左右来回点亮/* 名称:8只LED左右来回点亮说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;P2=0x01;while(1){{P2=_crol_(P2,1); //P2的值向左循环移动DelayMS(150);}for(i=0;i<7;i++){P2=_cror_(P2,1); //P2的值向右循环移动DelayMS(150);}}}04 花样流水灯/* 名称:花样流水灯说明:16只LED分两组按预设的多种花样变换显示*/#include<reg51.h>#define uchar unsignedchar#define uint unsigned intuchar code Pattern_P0[]={0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff, 0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f, 0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff, 0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff, 0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe, 0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};uchar code Pattern_P2[]={0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0xff, 0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f, 0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff, 0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f, 0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff, 0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00, 0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;while(1){ //从数组中读取数据送至P0和P2口显示for(i=0;i<136;i++){P0=Pattern_P0[i];P2=Pattern_P2[i];DelayMS(100);}}}05 LED模拟交通灯/* 名称:LED模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5此后变红灯,东西向变绿灯,如此重复。
引言概述:
正文内容:
一、设计目的
1.1.实现交通灯的循环变化控制
1.2.提高交通流畅性和效率
1.3.确保交通安全性和顺畅进行
二、设计原理
2.1.使用C51单片机来进行交通灯的控制
2.2.通过输入和输出控制来实现交通灯的变化
2.3.利用定时器来控制交通灯的时间间隔
2.4.使用状态机来管理不同交通灯状态的切换
三、实现步骤
3.1.设计交通路口的几个不同方向的交通流线
3.2.根据交通流量和优先级确定交通灯的时间间隔
3.3.编写C语言程序,在C51单片机上实现交通灯控制3.
4.进行硬件连接和测试,确保程序正常运行
3.5.进行调试和优化,使交通灯控制更加精准和稳定
四、注意事项
4.1.注意交通流量的变化和应对策略的调整
4.2.确保交通灯程序适应不同交通流量和交通情况的变化4.3.防止信号错误和故障导致交通混乱或事故发生
4.4.遵守相关交通规则和法规,确保交通安全
总结:。
毕业设计基于单片机的交通信号的灯控制系统一. 综合实训的主要内容 1.设计任务设计一单片机控制的交通信号灯系统,模拟城市十字路口交通信号灯功能。
2.基本功能要求2.1 交通信号控制直行车道红黄绿灯控制、左行车道绿灯控制、人行横道红绿灯控制。
2.2 通行时间显示数码管倒计时显示通行时间。
2.3 时间参数设置存储按键实现通行时间的设置,并存储到EEPROM (24C02)芯片中。
二. 硬件方案设计与论证 1. 显示模块设计1.1倒计时时间显示设计思想:由于该系统要求完成倒计时显示通行时间的功能,且考虑到实际的交通系统中车辆及行人通行时间不会超过一分钟,基于以上原因,我们考虑完全采用数码管显示,四个路口分别采用一个二位共阴极数码管进行显示。
(其实物图见附录1图5.3)图2.1 数码管原理图原理图分析:为了显示数字或字符,必须对数字或字符进行编码。
七段数码管GND abcde fg dp gf ed c ba(a)(a,b,c,d,e,f,g)加上一个小数点(dp),共计8段,构成一个字节,通过对这八段给予高低平使二极管导通或截止,从而显示不同的数字或字符。
系统中所使用的是2位共阴数码管(实物图见附录),其管脚从左上方起顺时针依次为1,a,b,e,d,2,g,f,dp,c。
1.2 状态灯显示设计思想:由于该系统要求完成状态灯显示的功能,我们把各个路口的红灯和黄灯设成直行和左拐两个通行方式所共有,也就是说,一个路口只需四个状态灯,一个直行通行的绿灯,一个左拐通行的绿灯,一个共有的红灯,一个共有的黄灯,人行横道采用红绿灯控制,综上所述,我们共使用16个LED绿灯,12个LED 红灯,4个LED黄灯来完成状态灯显示功能。
2.控制模块设计2.1 设计思想由于本系统结构简单,实现较容易,不需要大量的外围扩展,所以我们采用STC89C51单片机作为主控制器,STC89C51单片机具有体积小,功耗低,控制能力强,价格低、扩展灵活,使用方便等特点,其最小系统由振荡电路、复位电路构成。
xxxxxxxxx基于AT89S52交通灯设计学院:电子信息工程专业班级:xxxxxxxxxxxxxx姓名:xx xx学号:xxxxxxxxxxx指导老师:xxxxxxxxxx摘要交通灯在我们日常生活中随处可见,它在交通系统中处于至关重要的位置。
交通灯的使用大大减少了交通繁忙路口的事故发生,给行人和车辆提供一个安全的交通环境,人们的生命和财产安全有了保障。
本设计旨在模拟十字路口的交通灯,以AT89S51单片机为基础,结合按键和数码管等元器件设计出一个简单且完全的交通灯系统。
关键词:交通灯AT89S52 单片机目录一、设计任务 (4)二、AT89S52单片机及其他元器件简介 (4)(1)AT89S52单片机 (4)三、系统硬件电路设计 (6)(1)时钟电路设计 (6)(2)复位电路设计 (6)(3)灯控制电路设计 (7)(4)按键控制电路设计 (7)四、元件清单及实物图 (8)1、程序清单 (8)2、原理图 (9)五、实验心得 (9)附1 源程序代码 (10)附2 原理图 (16)一、设计任务(1)、设计一个十字路口的交通灯控制电路,要求南北方向和东西方向两条交叉道路上的车辆交替运行,每次通行时间都设30秒,时间可设置修改。
(2)、在绿灯转为红灯时,要求黄灯先亮5秒钟,才能变换运行车道,且黄灯亮时,要求每秒亮一次。
(3)、有紧急车辆要求通过时,系统要能禁止东西和南北两条路上所有的车辆通行。
二、AT89S52单片机及其他元器件简介(1)AT89S52单片机AT89S52是一种低功耗、高性能CMOS8位微控制器。
片上Flash允许程序存储器在系统可编程,亦适于常规编程器。
在单芯片上,拥有灵巧的8位CPU和在系统可编程Flash,使得AT89S52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
AT89S52具有以下标准功能:8K字节Flash,256字节RAM,32位I/O口线,看门狗定时器,2个数据指针,三个16位定时器/计数器,一个6位向量2级中断结构,全双工串行口,片内晶振及时钟电路。
单片机控制交通灯c51程序先上图/*程序效果:单片机模拟控制交通灯程序,规则如下:当南北通车时,此时南北的绿灯亮,东西的红灯亮,之后南北的绿灯闪烁3 次,过后黄灯亮,延时片刻,转东西绿灯亮同时南北红灯亮,之后东西的绿灯闪烁3 次,过后黄灯亮,延时片刻;数码管显示的值都同步,结束。
全部代码由51hei 站长开发(由于站长对交通灯的规则不是特别了解,产生于事实冲突,敬请包涵)*/#includereg52.h //头文件#define uchar unsigned char//宏定义#define uint unsigned intuchar code table[]={0x00,0x01,0x02,0x03, //数码管显示的值0x04,0x05,0x06,0x07,0x08,0x09,0x10,0x11,0x12,0x13,0x14,0x15,0x16,0x17,0x18,0 x19,0x20,0x21,0x22,0x23,0x24,0x25,0x26,0x27,0x28,0x29,0x30,0x31,0x32,0x33,0x 34,0x35,0x36,0x37,0x38,0x39,0x40,0x41,0x42,0x43,0x44,0x45};void delay(uint x)// 延时子函数{uint i,j;for(i=x;i0;i--) for(j=500;j0;j--);}void main() //主函数{uchar i; //定义局部变量P1=table[0]; //数码管显示0delay(400);//延时一会儿,在此之前所有数码管全为0,while(1) //所有的交通灯都亮{ for(i=0;i45;i++) //南北通车较多,故延时较多{P2=0x0a; //南北绿灯亮,东西红灯亮P1=table[i]; delay(200); } for(i=0;i3;i++) //南北绿灯闪烁3 次,同时东西红灯亮{ P2=0x0a; delay(200);P2=0x02; delay(200); } P2=0x22; //南北黄灯亮,。
基于51单片机的交通灯C语言程序设计
2011-05-07 07:57
十字交叉路口的交通灯控制器,是很常见的课程设计题目。
做而论道以前写过一个,功能十分简单。
最近,综合了一些百度知道中的题目要求,写出了一个稍稍复杂一点设计方案,使用了大家比较喜欢的C语言编写程序。
基本功能如下:
(1)东西、南北方向各设有一个绿、黄、红指示灯,两个显示数码管。
(2)两个方向交替允许通行,基本放行时间为25s,另外有黄灯闪烁5s。
(3)控制人员可以暂停自动的交替,使某个方向可以无限长时间的通行。
(4)暂停期间,控制人员可以调整通行的时间,程序中还设置了调整的上下限。
(5)暂停之后,灯光将按照设置的通行时间自动变换通行方向。
(6)在正常通行期间,可以强制变换通行方向。
强制变换的时候,也是要先显示闪烁的黄灯,然后切换到指定的方向。
程序用PROTEUS仿真成功,并没有进行硬件实验。
仿真截图画面如下。
插图链接:
/%D7%F6%B6%F8%C2%DB%B5%C0/album/item/2b4a22423e0d5 c4972f05de6.html#
C语言的控制程序如下:
//------------------------------------------------
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
//----------------定义接口------------------------
#define K_IN P1 //指定按键输入端口
#define Star_Stop 1 //指定按键输入端口
#define Time_ADD 2 //指定按键输入端口
#define Time_SUB 4 //指定按键输入端口
#define Turn_EW 8 //指定按键输入端口
#define Turn_SN 16 //指定按键输入端口
sbit D_R = P3^0;
sbit D_Y = P3^1;
sbit D_G = P3^2;
//----------------定义变量------------------------ uchar Key_C; //新键值
uchar Key_L; //上次键值
uchar Trg; //触发(有键按下)triger
uchar Trg_L; //上次触发
uchar Key_P; //确实按下
uchar n_2ms, n_0D5s, D_SEC = 60; //60实际上是30秒uchar code D_seg[] = { //共阳段码
0xc0, 0xf9, 0xa4, 0xb0, 0x99,
0x92, 0x82, 0xf8, 0x80, 0x90}; //0-9
bit s_g, run, hong;
//----------------延时---------------------------- void delay(uint z)
{
uint x, y;
for(x = z; x > 0; x--) for(y = 123; y > 0; y--); }
//----------------读按键-------------------------- void KeyRead( void ) //读按键所在端口,送到全局变量{
Key_L = Key_C; //上次按键数值
Trg_L = Trg;
Key_C = ~K_IN; //反相读入,有键按下,将读入1 Trg = Key_C & (Key_C ^ Key_L);
Key_P = Key_C & Trg_L; 确认按下
}
//----------------初始化-------------------------- void init(void)
{
TMOD = 0x01; //T0定时方式1
TH0 = (65536 - 2000) / 256; //2ms@12MHz
TL0 = (65536 - 2000) % 256;
TR0 = 1; //启动T0
ET0 = 1; //开T0中断
EA = 1; //开总中断
//---------------------
D_Y = 0; //关灯
D_R = hong; //红灯取决于当前的hong
D_G = ~D_R; //绿灯则相反
n_0D5s = D_SEC; //倒计时的秒数(2倍的数值)
}
//----------------主函数--------------------------
void main(void)
{
hong = 1; //hong = 1: 东西为红灯
init();
run = 1; //开机即运行
while(1) {
delay(8); //延时8ms
if (Star_Stop & Key_P) {
run = ~run;
if (!run) init();
}
if (Time_ADD & Key_P && !run) {
D_SEC += 2;
if (D_SEC > 120) D_SEC = 120;
n_0D5s = D_SEC;
}
if (Time_SUB & Key_P && !run) {
D_SEC -= 2;
if (D_SEC < 20) D_SEC = 20;
n_0D5s = D_SEC;
}
if (Turn_EW & Key_P && run && hong) n_0D5s = 11;
if (Turn_SN & Key_P && run && !hong) n_0D5s = 11;
}
}
//----------------T0中断函数----------------------
void T0_INT(void) interrupt 1
{
TL0 = (65536 - 2000) % 256; //重新写入初值
TH0 = (65536 - 2000) / 256; //2ms@12MHz
//----------------数码显示------------------------
s_g = ~s_g; //十位个位交替显示
if (s_g) {P2 = 0; P0 = D_seg[(n_0D5s / 2) / 10]; P2 = 1;} else {P2 = 0; P0 = D_seg[(n_0D5s / 2) % 10]; P2 = 2;} //----------------修改时间------------------------
n_2ms--;
if (n_2ms % 5 == 0) KeyRead(); //10ms读一次按键
if (n_2ms == 0) {
n_2ms = 250; //定时500ms
if (run) { //如果是正在运行
n_0D5s--; //就倒计时
if(n_0D5s == 1) n_0D5s = D_SEC + 1;//减到1就重新开始 if(n_0D5s == D_SEC + 1) {//如果是重新开始
if (hong) { //如果当前是红灯亮
hong = 0; //下面就改成绿灯亮
D_Y = 0; //关闭黄灯
D_G = 1; //打开绿灯
D_R = 0; //关闭红灯
}
else { //否则就改成红灯亮
hong = 1;
D_Y = 0; //关闭黄灯
D_G = 0; //关闭绿灯
D_R = 1; //打开红灯
} }
if(n_0D5s <= 11) {//如果是最后5秒
D_Y = ~D_Y; //黄灯闪烁
D_G = 0; //关闭绿灯
D_R = 0; //关闭红灯
} } } }
//----------------程序结束------------------------。