同步整流电路的驱动方式综述
- 格式:docx
- 大小:82.17 KB
- 文档页数:3
第4章同步整流技术•内容——意义;基本原理;驱动方式——同步整流电路;同步整流技术的应用•目标——电路的结构及工作原理、电路分析及应用4.1 概述•高速超大规模集成电路的尺寸的不断减小,功耗的不断降低,要求供电电压也越来越低。
•在低电压(低于3V)大电流输出DC-DC变换器的整流管,其功耗占变换器全部功耗的50~60%。
•用通态损耗低的功率MOS管-同步整流管代替整流二极管,可提高DC-DC变换器的效率。
•同步整流技术的优点:正向压降很小,阻断电压高,反向电流小等4.2 同步整流技术的基本原理•功率MOS管反接作为整流管使用:源极S相当于二极管的阳极A,漏极D相当于二极管的阴极K。
在门极和源极(GS)间加驱动信号。
•门极电压与漏源极间电压变化同步,因此称为同步整流。
功率MOS管用做同步整流,三个关键参数:1. SR的功耗:损耗因数K:2. SR的体二极管恢复时间trr 3.SR的阻断电压22 SR Frms on in GS P I R C V f =+on inK R C=4.3 同步整流驱动方式•驱动电路性质:电压型驱动、电流型驱动•驱动电压的来源:外驱动(控制驱动)、自驱动1.外驱动同步整流技术•驱动电压:来自外设驱动电路•同步信号:主开关管的驱动信号来控制•优点:控制时序精确,SR效率较高•缺点:驱动电路复杂,有损耗,价格贵,开发周期长2.电压型自驱动同步整流•驱动电压:SR所在回路中的某一电压•要求:波形转换快,时序准确,无死区•优点:简单,实用•缺点:驱动方式随电路结构而不同;受输入电压变化范围的影响;受变压器漏感影响;不能用于并联工作的SR-DC/DC变换器中;对变换器轻载时的工作有影响。
3.电流型自驱动同步整流•驱动电压:SR中的电流通过电流互感器产生•优点:驱动波形无死区,不受输入电压影响,不受电路结构的影响,可用于并联运行的DC-DC变换器。
•缺点:电流检测元件有损耗,能量回馈的电流型自驱动SR方案4.4 同步整流电路1. 全波SR电路2.倍流SR电路4.5 SR-Buck变换器4.6 SR-正激变换器1.有磁复位绕组的SR-正激变换器2.SR-有源钳位正激变换器4.7 SR-反激变换器。
同步整流电路的驱动方式综述预研部余恒23343一、问题提出:为了适应电子、通信设备和大规模集成电路的供电要求,DC/DC 模块电源输出电压越来越低,而输出电流却越来越大。
传统的肖特基整流方式逐渐被同步整流方式所取代。
用低导通电阻MOSFET代替常规肖特基整流/续流二极管,可以大大降低整流部分的功耗,提高变换器的性能,实现电源的高效率,高功率密度。
同步整流已经相当流行。
但是用MOS代替肖特基二极管势必带来这样一个问题:同步整流MOS管如何驱动?因为二极管不需要驱动,而MOS管是需要驱动的。
对于同步整流管的驱动方式,本人收集了部分资料,做了总结,向各位专家学习。
二、驱动方式探讨:从总的来说同步整流管的驱动方式分为自驱和外驱。
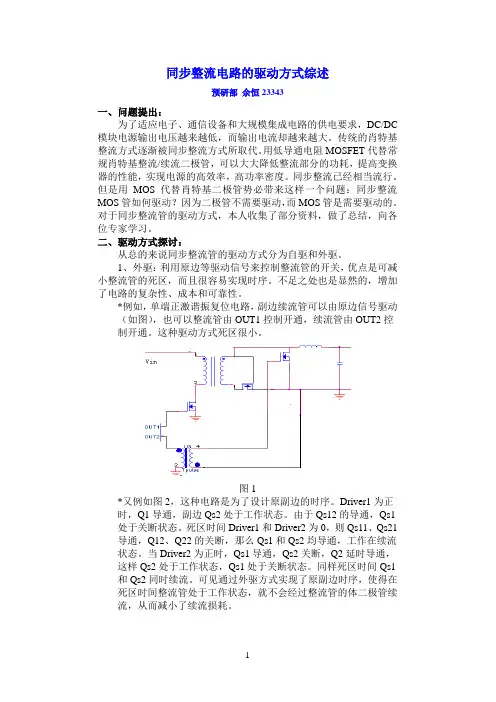
1、外驱:利用原边等驱动信号来控制整流管的开关,优点是可减小整流管的死区,而且很容易实现时序。
不足之处也是显然的,增加了电路的复杂性、成本和可靠性。
*例如,单端正激谐振复位电路,副边续流管可以由原边信号驱动(如图),也可以整流管由OUT1控制开通,续流管由OUT2控制开通。
这种驱动方式死区很小。
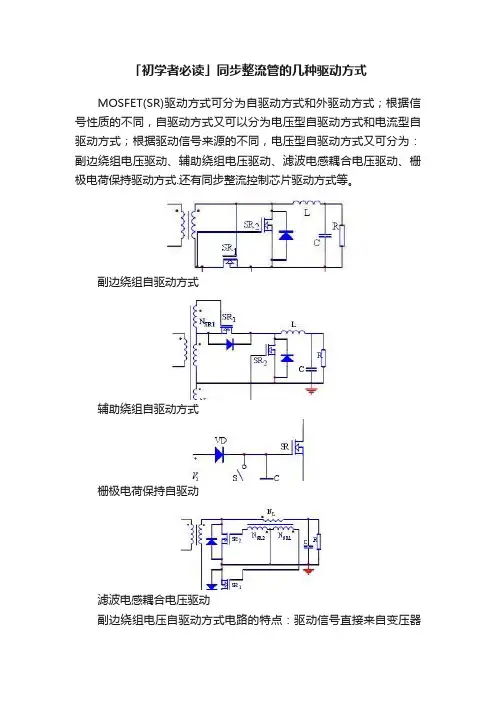
图1*又例如图2,这种电路是为了设计原副边的时序。
Driver1为正时,Q1导通,副边Qs2处于工作状态。
由于Qs12的导通,Qs1 处于关断状态。
死区时间Driver1和Driver2为0,则Qs11、Qs21 导通,Q12、Q22的关断,那么Qs1和Qs2均导通,工作在续流状态。
当Driver2为正时,Qs1导通,Qs2关断,Q2延时导通,这样Qs2处于工作状态,Qs1处于关断状态。
同样死区时间Qs1 和Qs2同时续流。
可见通过外驱方式实现了原副边时序,使得在死区时间整流管处于工作状态,就不会经过整流管的体二极管续流,从而减小了续流损耗。
图22、驱:优点:利用辅助绕组或者副边工作绕组进行自驱,电路简单,成本节约。
缺点:存在死区,驱动波形不好,驱动电压和时序不好安排。
*例如单端正激谐振复位电路,如果副边采用完全自驱方式,就会存在死区,在该时间输出电流经过续流管的体二极管续流,影响效率。
「初学者必读」同步整流管的几种驱动方式
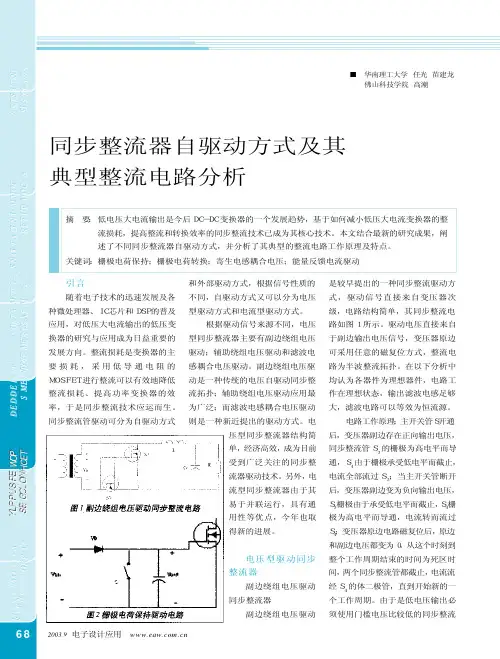
MOSFET(SR)驱动方式可分为自驱动方式和外驱动方式;根据信号性质的不同,自驱动方式又可以分为电压型自驱动方式和电流型自驱动方式;根据驱动信号来源的不同,电压型自驱动方式又可分为:副边绕组电压驱动、辅助绕组电压驱动、滤波电感耦合电压驱动、栅极电荷保持驱动方式.还有同步整流控制芯片驱动方式等。
副边绕组自驱动方式
辅助绕组自驱动方式
栅极电荷保持自驱动
滤波电感耦合电压驱动
副边绕组电压自驱动方式电路的特点:驱动信号直接来自变压器
副边绕组,电路结构简单;变压器复位为零时,电流流经SR2的体二极管,电路损耗增加。
辅助绕组电压自驱动方式电路的特点:只需改变辅助绕组的匝数,就可以有效地驱动不同阀值电压的SR管;变压器复位为零时,电流流经SR2的体二极管,电路损耗增加。
栅极电荷保持电压自驱动仅仅需要一个辅助开关管和二极管就可以解决死区时间内续流 SR 管体二极管的导通问题,使得整流损耗大大减小从而极大地提高了开关变换器的效率。
滤波电感耦合电压驱动方式中,变压器原边可以采取任意一种磁复位方式,很好地解决了传统电压驱动方式存在续流
SR 管体二极管导通的问题,从而提高了变换器的转换效率。
缺点是在输出滤波电感上增加了两个副边绕组,电感绕制工艺变得复杂。
同步整流技术简介1概述近年来,为了适应微处理器的发展,模块电源的发展呈现两个明显的发展趋势:低压和快速动态响应,在过去的10年中,模块电源大大改善了分布式供电系统的面貌。
即使是在对成本敏感器件如线路卡,单板安装,模块电源也提供了诱人的解决方案。
然而,高速处理器持续降低的工作电压需要一个全新的,适应未来的电压方案,尤其考虑到肖特级二极管整流模块不能令人满意的效率。
同步整流电路正是为了适应低压输出要求应运而生的。
由于一般的肖特基二极管的正向压降为0.3V以上,在低压输出时模块的效率就不能做的很高,有资料表明采用肖特基二极管的隔离式DC-DC模块电源的效率可以按照下式进行估算:我们假设采用0.4V的肖特基整流二极管,印制板的线路损耗为0.1V,则1.8V的模块最大的估算效率为72%。
这意味着28%的能量被模块内部损耗了。
其中由于二极管导通压降造成的损耗占了约15%。
随着半导体工艺的发展,低压功率MOS管的的有着越来越小的通态电阻,越来越低的开关损耗,现在IR公司最新的技术可以制作30V/2.5m Ω的MOS管,在电流为15A时,导通压降为0.0375,比采用肖特基二极管低了一个数量级。
所以近年来对同步整流电路的研究已经引起了人们的极大关注。
在中大功率低压输出的DC-DC变换器的产品开发中,采用低压功率MOSFET替代肖特基二极管的方案得到了广泛的认同。
今天,采用同步整流技术的ON-BOARD 模块已经广泛应用于通讯的所有领域。
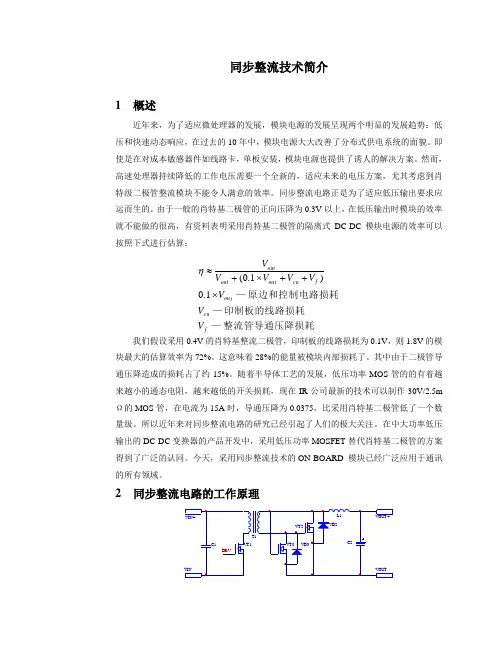
2同步整流电路的工作原理整流管导通压降损耗—印制板的线路损耗—原边和控制电路损耗—fcutoufcutououtoutVVVVVVVV⨯++⨯+≈1.0)1.0(η图1 采用同步整流的正激电路示意图(无复位绕组) 同步整流电路与普通整流电路的区别在于它采用了MOS管代替二极管,而MOS管是它驱的开关器件,必须采用一定的方式控制MOS管的开关。
同步整流电路中功率MOS 管的驱动方式主要有两种:自驱动和它驱动。
同步整流技术已经成为现代开关电源技术的标志。
凡是高水平开关电源,必定有同步整流技术。
在使用面上早已不再局限于5V、3.3V、2.5V这些低输出电压领域,现在上至12V,15V,19V至24V以下输出,几乎都在使用同步整流技术。
下面介绍和分析各种同步整流技术的优点、缺点及实现方法。
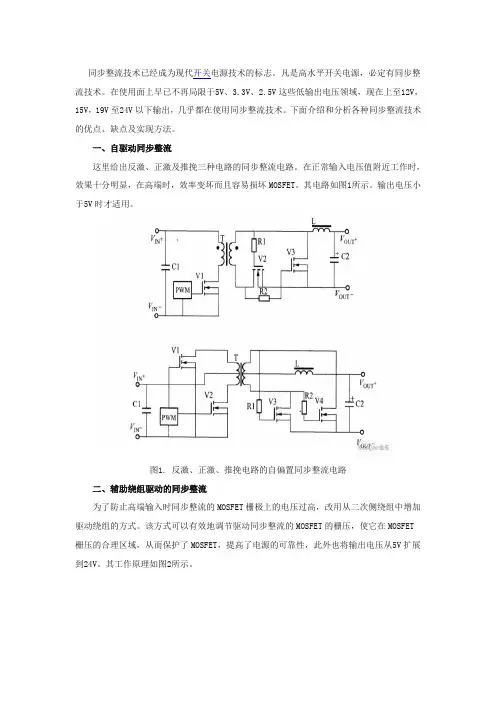
一、自驱动同步整流这里给出反激、正激及推挽三种电路的同步整流电路。
在正常输入电压值附近工作时,效果十分明显,在高端时,效率变坏而且容易损坏MOSFET。
其电路如图1所示。
输出电压小于5V时才适用。
图1. 反激、正激、推挽电路的自偏置同步整流电路二、辅助绕组驱动的同步整流为了防止高端输入时同步整流的MOSFET栅极上的电压过高,改用从二次侧绕组中增加驱动绕组的方式。
该方式可以有效地调节驱动同步整流的MOSFET的栅压,使它在MOSFET栅压的合理区域,从而保护了MOSFET,提高了电源的可靠性,此外也将输出电压从5V扩展到24V。
其工作原理如图2所示。
图2辅助绕组驱动的同步整流电路三、控制IC方式的同步整流为提高驱动同步整流MOSFET的效果,从而设计了各种模式的同步整流的控制驱动IC,也取得了不少成果,它将同步整流MOSFET的栅压调至最佳状态。
将其开启关断也提高了时控精度,其主要的不足在于MOSFET的源极必须接地,这会加大地线上的开关噪声,并传输至电源输出端。
此外其开关时序由自身输出脉冲给出,所以同步整流MOSFET的开启关断通常为硬开关,其时间会与初级侧主开关有些时间差,因此输出电压大体控制在20V以下,ST 公司推出的STSR2、STSR3,以及线性技术公司的LTC3900和LTC3901即是此种控制方式的代表作品。
图3和图4给出其应用电路图。
图3 STSR2,STSR3驱动同步整流的电路图4 LTC3900和LTC3901驱动的同步整流电路四、ZVS、ZCS同步整流该种方式诞生于2002年5月,在全桥或半桥电路中,PWM 输出的信号经信号变压器或高速光耦传递至二次侧,再经过RC网络积分后,经过MOSFET驱动器去驱动同步整流的MOSFET,驱动信号的脉冲宽度几乎不变,保持各50%的占空比,而当DC/DC系统输出电压稳压,一次脉宽调宽以后,二次侧同步整流MOSFET 即工作于ZVS、ZCS条件之下。
同步整流器两种驱动方式的分析和比较胡宗波,张 波(华南理工大学,广州 510640) 摘要:结合电压驱动同步整流器和电流驱动同步整流器的最新研究成果,对同步整流器电压驱动方式和电流驱动方式进行了分析和比较。
阐述了在低电压大电流DC/DC功率变换器中,同步整流技术对提高功率变换器性能,特别是提高变换器效率的重要性。
关键词:整流器/电压驱动;电流驱动中图分类号:TM46 文献标识码:A 文章编号:1000-100X(2001)06-0056-05Analysis and Comparison of Tw o Methods to Drive Synchronous R ectif iersHU Z ong2bo,ZHAN G Bo(South China U niversity of Technology,Guangz hou510640,China)Abstract:Based on the latest research results of voltage driven synchronous rectifier and current driven s ynchronous rectifier,two methods to drive synchronous rectifiers(SR),i.e.voltage driven and current driven,are analyzed and com2 pared.The importance of synchronous rectification for im proving the performance,es pecially for increasing the efficiency of the low voltage and large current DC/DC converter are described.K eyw ords:rectifier;voltage drive;current drive1 引 言目前,微处理器等很多高速数字逻辑电路都需要低电压大电流功率变换器。
同步整流的自驱电路
目录
1概述(电路类别、实现主要功能描述): (2)
2电路组成(原理图): (2)
3工作原理分析(主要功能、性能指标及实现原理): (2)
4关键参数计算分析: (2)
5电路的优缺点 (2)
6电路的应用说明: (2)
7应用的注意事项: (2)
1概述(电路类别、实现主要功能描述):
电路简单,器件较少,不同的同步管(具有不同的输入电容)需要外接不同容量的电容。
关机(尤其是空载带大容量电容)时,电容存储的电荷导致同步管再次开通,以致原边开关管反压增高,容易超出原边开关管承受电压,因此原边开关管存在隐患。
解决办法是:输入加容量大的电容,将高压嵌位住。
6电路的应用说明:
ESR08-48S8(-L)G;ESR06-48S12(-L)G;QSR20-48S5(-L)G均是同类电路。
且已大批量生产,验证此电路方式工作稳定、可靠性高。
7应用的注意事项:
注意根据不同,MOS管计算外加分压电容值,要考虑全输入电压范围;使用时(尤其是输出带大容量电容时)输入一定要接一只容量大的电容。
同步整流电路的驱动方式综述
预研部余恒23343
一、问题提出:
为了适应电子、通信设备和大规模集成电路的供电要求,DC/DC 模块电源输出电压越来越低,而输出电流却越来越大。
传统的肖特基整流方式逐渐被同步整流方式所取代。
用低导通电阻MOSFET代替常规肖特基整流/续流二极管,可以大大降低整流部分的功耗,提高变换器的性能,实现电源的高效率,高功率密度。
同步整流已经相当流行。
但是用MOS代替肖特基二极管势必带来这样一个问题:同步整流MOS管如何驱动?因为二极管不需要驱动,而MOS管是需要驱动的。
对于同步整流管的驱动方式,本人收集了部分资料,做了总结,向各位专家学习。
二、驱动方式探讨:
从总的来说同步整流管的驱动方式分为自驱和外驱。
1、外驱:利用原边等驱动信号来控制整流管的开关,优点是可减
小整流管的死区,而且很容易实现时序。
不足之处也是显然的,增加了电路的复杂性、成本和可靠性。
*例如,单端正激谐振复位电路,副边续流管可以由原边信号驱动
(如图),也可以整流管由OUT1控制开通,续流管由OUT2控
*又例如图2,这种电路是为了设计原副边的时序。
Driverl为正时,Q1导通,副边Qs2处于工作状态。
由于Qs12的导通,Qs1 处于关断状态。
死区时间Driverl和Driver2为0,则Qs11、Qs21 导通,Q12、Q22的关断,那么Qs1和Qs2均导通,工作在续流状态。
当
Driver2为正时,Qs1导通,Qs2关断,Q2延时导通,这样Qs2处于工作状态,Qs1处于关断状态。
同样死区时间Qs1 和Qs2同时续流。
可见通过外驱方式实现了原副边时序,使得在死区时间整流管处于工作状态,就不会经过整流管的体二极管续流,从而减小了续流损耗。
2、驱:优点:利用辅助绕组或者副边工作绕组进行自驱,电路简单,成本节约。
缺点:存在死区,驱动波形不好,驱动电压和时序不好安排。
*例如单端正激谐振复位电路,如果副边采用完全自驱方式,就会存在死区,在该时间输出电流经过续流管的体二极管续流,影响效
率。
并且驱动波形不好,如图3。
从图可见驱动电压波形不平直,而且在toff内有一部分时间驱动电压为零。
左:原边MOS管电压右:副边续流管的驱动电压
图3
*又例如,36〜75V输入,12V30A输出正激电路,如果最大占空比为
0.5,那么匝比可得为3:2。
如果驱动绕组设为1匝,在75V 输入时
驱动峰值稳态为75/3=25V,就超过了M0S的门极驱动电压(一般为+ / —20V )。
如果利用工作绕组自驱,则2/3*(36~75)=24~50V,同样超过了M0S的门极驱动电压范围。
这种情况匝比不好选择。
三、对自驱存在的问题解决办法:
1、有源篏位法:把篏位电容稍微取大一点,可以使原边M0S管的Vds 变得平直,那么副边续流管的驱动电压Vgs=(Vds-Vin)/n就平直,因此减小死区损耗。
2、门极电荷存储法:把整流管门极的驱动电荷存储着,保持驱动电压不变,直到换相时才泄放掉门极的存储电荷。
这样可以减小死区。
如图4。
图4左边需要外加拉电荷电路。
图4右边为外加单绕组自驱
方式。
当整流管工作时,续流管被并在续流管GS之间的二极管篏位为-0.7V,同样续流管工作时,整流管被并在整流流管GS之间的二极管篏位为-0.7V,死区时间门极电荷平分在整流管和续流管的门极。
图4
3、工作绕组分压方式:该方式可以解决工作绕组做驱动绕组电压
高的问题。
因为MOS管的GS之间相当于一个电容,如果在G极串
联电容,则在GS之间得到的为加在两个电容之间的分压。
如图5。
设副边电压为Us,那么整流管的Vgs=C1/(C1+Cgs1)*Us,续流管的Vgs=
C2/(C2+Cgs1)*Us。
调整几次C1和C2的值就会获得合适的副边驱动电压。