浅析带钢的对中纠偏控制(新版)
- 格式:docx
- 大小:48.29 KB
- 文档页数:7
收稿日期:2003-02-10作者简介:谢忠亮(1965-),男,辽宁复县人,本钢冷轧薄板厂工程师.文章编号:1008-3723(2003)02-0014-04带钢的“跑偏”及纠正谢忠亮(本溪钢铁公司冷轧薄板厂,辽宁本溪117021)摘要:针对带钢在运送过程中,受各种因素影响而出现的“跑偏”情况加以说明、分析。
并提出采用控制辊系统纠偏方式,并对其纠偏方式进行分析、探讨。
关键词:带钢;跑偏;张力;纠偏中图分类号:TG 333.7 文献标识码:A0 引言在带钢连续生产设备和带钢处理设备中,使带钢无故障运送,并且卷取时边缘整齐,这是比较困难的。
特别是随着工艺设备的改进、机组速度逐年的提高,加工的带钢趋向又薄又宽。
为适应带钢快速连续生产,带钢活套的储存量越来越长,这就必须对带钢运送的“跑偏”进行研究,并加以控制。
1 带钢的跑偏分析带钢在辊子上行走,只要带钢和辊子表面有接触,并在一定的摩擦阻力界限内,那么带钢上各点就会和辊子的中心线成直角行走。
带钢的张力是平均分布的,即当带钢靠上辊子时,带钢就会垂直于辊子的中心轴行走。
带钢在运送辊上行走,如果运送辊是相互平行的,带钢与辊子之间接触在摩擦阻力界限之内,带钢平直,断面薄厚均匀,则作用在带钢上的张力分布均匀。
这样,带钢在辊子上行走就不会“跑偏”,即能保持在运行中心,无侧向位移。
但实际上在带钢的运送上,会有各种扰动,引起带钢在运送中的“跑偏”。
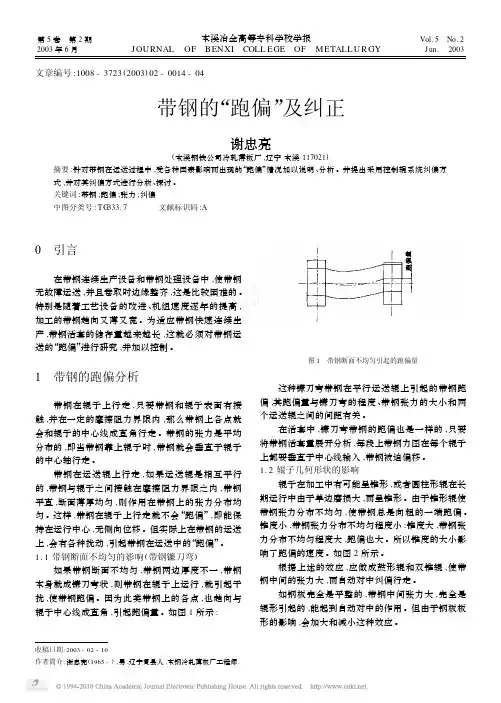
1.1带钢断面不均匀的影响(带钢镰刀弯)如果带钢断面不均匀,带钢两边厚度不一,带钢本身就成镰刀弯状,则带钢在辊子上运行,就引起干扰,使带钢跑偏。
因为此类带钢上的各点,也趋向与辊子中心线成直角,引起跑偏量。
如图1所示:图1 带钢断面不均匀引起的跑偏量这种镰刀弯带钢在平行运送辊上引起的带钢跑偏,其跑偏量与镰刀弯的程度、带钢张力的大小和两个运送辊之间的间距有关。
在活套中,镰刀弯带钢的跑偏也是一样的,只要将带钢活套量展开分析,每段上带钢力图在每个辊子上都要垂直于中心线输入,带钢被迫偏移。
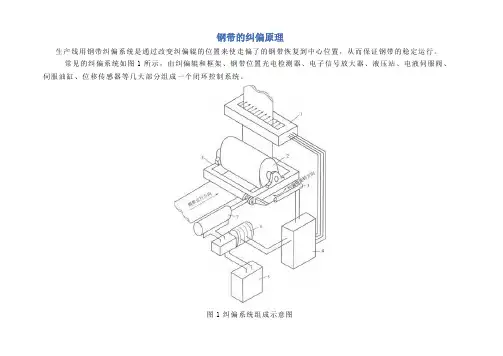
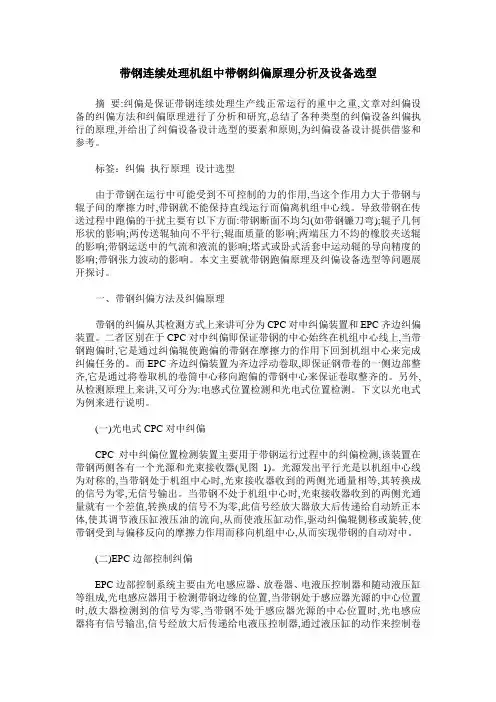
钢带的纠偏原理生产线用钢带纠偏系统是通过改变纠偏辊的位置来使走偏了的钢带恢复到中心位置,从而保证钢带的稳定运行。
常见的纠偏系统如图1所示,由纠偏辊和框架、钢带位置光电检测器、电子信号放大器、液压站、电液伺服阀、伺服油缸、位移传感器等几大部分组成一个闭环控制系统。
图1纠偏系统组成示意图1-钢带位置光电检测器;2-纠偏辊及框架;3-纠偏辊位移传感器;4-电子信号放大器;5-液压站;6-电液伺服阀;7-伺服油缸;8-旋转轴(图中不可见);其工作原理是:如图2所示图2钢带位置光电检测器原理图;光电检测器有光源发射器和接收器两个主要部分,光源发射器发生的光线一部分被钢带挡住,另外在钢带两侧边缘各有一部分射向对面的光电二极管接收器,被其接收到转换成电信号。
接收器分为钢带两侧边两部分,分别与两只可变电阻R3、R4组成了电桥。
如果钢带处于生产线中心位置,则两侧边的接收器接收到的光线量相同,其两部分光电二极管的电流或电阻也相同,即Rl=R2。
这时调整可变电阻,使R3=R4。
这样电桥的Rl×R4=R2×R3,处于平衡状态,输出的信号为零,纠偏辊也处于中心位置状态。
如果钢带偏向一边,则电桥的Rl×R4与R2×R3不等,会输出一定的信号给信号处理放大器,这个信号即是钢带的位置偏差信号,能反映出钢带往哪个方向偏离中心线,偏移量是多少。
放大器‘便由此计算出为了纠正这样大小的偏移量和纠偏辊应该转过的理论角度。
另外,有一个位移传感器安装于纠偏旋转框上,它是一个可变电阻,输出的阻值随纠偏辊的位置变化而变化,它也向信号处理放大器提供一个纠偏辊的实际位置信号,即反映纠偏目前已经往哪个方向旋转,旋转的实际角度是多少。
这样信号处理放大器就可以将纠偏辊所需要旋转的理论角度与实际角度相比较,决定驱动纠偏辊框架的液压缸是向外伸出还是向内缩回,且移动多少,并向液压控制系统发出指令,由电液伺服阀控制液压缸动作,推动纠偏辊框架向所需的角度方向旋转,从而使钢带恢复到正常位置。
浅析冷轧带钢纠偏设备机械故障原因张廷旺摘要:冷轧带钢轧制过程中,在对中检测系统的控制下,纠偏设备能够纠正设备偏差或来料缺陷所造成的带钢跑偏,保证带钢自动对中状态下运行,纠偏精度的高低,将直接影响冷轧机组带钢的正常运行和出口卷取机带钢的卷取质量。
本文主要分析探讨了冷轧带钢纠偏设备机械故障原因,以供参阅。
关键词:冷轧带钢;纠偏设备;机械故障;原因引言在冷轧机进行轧制的过程中,可能因为自身故障或者轧制材料的质量问题导致带钢出现偏差,比如轧机组各个设备之间的对接精度不足、轧辊运转速度不均匀、材料不同部位的塑性不同等。
这些因素都会很大程度上造成冷轧机带钢运行出现偏差。
如果轧机的带钢出现偏差,会导致所轧制出来的板材不符合标准规定,产品的合格率降低,缩短轧机的使用寿命。
所以对冷轧带钢跑偏问题的研究已经成为企业的重要课题之一。
1纠偏设备的工作原理(1)带钢跑偏的机理。
从来料方面看,带钢边部浪形、镰刀弯、钢卷塔形(边部卷取不齐)和带钢几何尺寸误差等因素;从纠偏设备本体方面看,辊子辊身有锥度、纠偏辊组平衡状态下排列与机组中心线不垂直及带钢运行中所建张力过低等都容易造成带钢运行过程中的跑偏。
(2)纠偏设备的构成以及工作原理。
CPC系统是轧制线较多采用的纠偏系统,它由带钢位置检测装置,测量信号放大器,电液伺服阀,纠偏液压缸,纠偏辊设备等组成,它是一个闭环控制系统,其控制框图如图1所示。
机组运行时,探测器连续监测带钢两边的位置变化,并将带钢位置转化为与之成比例的模拟电信号输出到控制放大器。
控制器将此信号和预先设定的带钢纠偏基准点信号相比较,两者之间若有任何偏差都将使控制器输出一偏差纠正信号至液压伺服阀系统,驱使液压系统推动纠偏辊设备作相应的移动,直至带钢重新对中于探测器探测范围的中心线。
如此往复动作,从而确保在整个机组运行过程中,带钢都能持续地运行在机组中心线上,不致出现跑偏现象。
图1 纠偏系统控制框图2纠偏设备机械故障原因分析及精度调整纠偏设备在长期工作过程中也会出现故障,当设备出现故障的时候,对纠偏效率会产生影响,例如纠偏精度不够高、控制器不能及时反应、不能及时制动等,导致带钢跑偏不能得到有效处理。
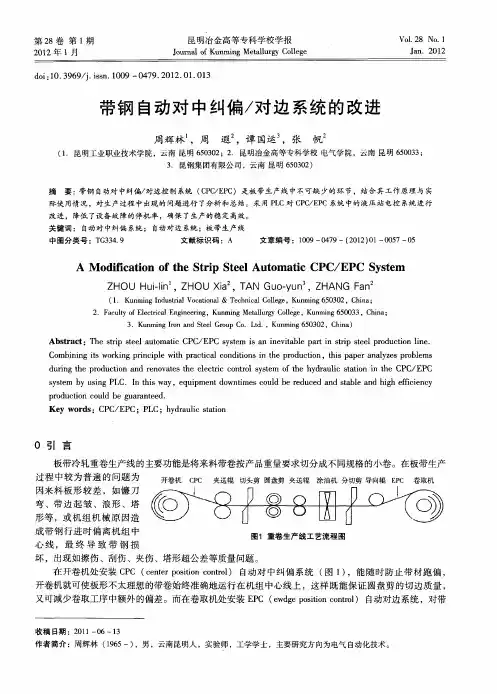
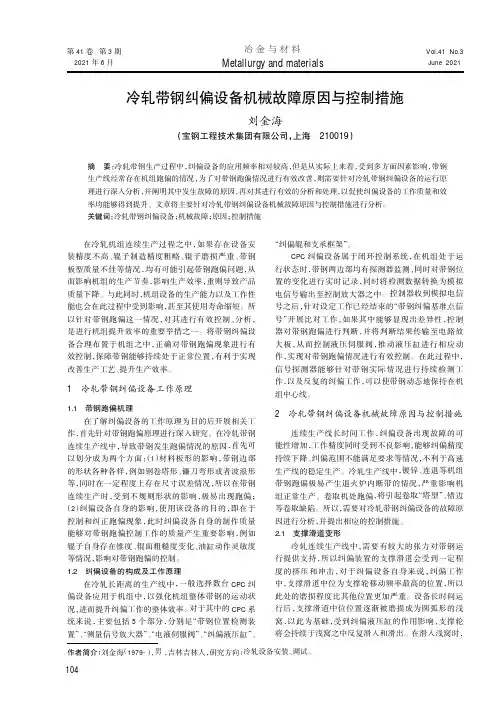
冷轧带钢纠偏设备机械故障原因与控制措施刘金海(宝钢工程技术集团有限公司,上海210019)摘要:冷轧带钢生产过程中,纠偏设备的应用频率相对较高,但是从实际上来看,受到多方面因素影响,带钢生产线经常存在机组跑偏的情况,为了对带钢跑偏情况进行有效改善,则需要针对冷轧带钢纠偏设备的运行原理进行深入分析,并阐明其中发生故障的原因,再对其进行有效的分析和处理,以促使纠偏设备的工作质量和效率均能够得到提升。
文章将主要针对冷轧带钢纠偏设备机械故障原因与控制措施进行分析。
关键词:冷轧带钢纠偏设备;机械故障;原因;控制措施作者简介:刘金海(1979-),男,吉林吉林人,研究方向:冷轧设备安装、调试。
Metallurgy and materials在冷轧机组连续生产过程之中,如果存在设备安装精度不高、辊子制造精度粗略、辊子磨损严重、带钢板型质量不佳等情况,均有可能引起带钢跑偏问题,从而影响机组的生产节奏,影响生产效率,重则导致产品质量下降。
与此同时,机组设备的生产能力以及工作性能也会在此过程中受到影响,甚至其使用寿命缩短。
所以针对带钢跑偏这一情况,对其进行有效控制、分析,是进行机组提升效率的重要举措之一。
将带钢纠偏设备合理布置于机组之中,正确对带钢跑偏现象进行有效控制,保障带钢能够持续处于正常位置,有利于实现改善生产工艺、提升生产效率。
1冷轧带钢纠偏设备工作原理1.1带钢跑偏机理在了解纠偏设备的工作原理为目的后开展相关工作,首先针对带钢跑偏原理进行深入研究。
在冷轧带钢连续生产线中,导致带钢发生跑偏情况的原因,首先可以划分成为两个方面:(1)材料板形的影响,带钢边部的形状各种各样,例如钢卷塔形、镰刀弯形或者波浪形等,同时在一定程度上存在尺寸误差情况,所以在带钢连续生产时,受到不规则形状的影响,极易出现跑偏;(2)纠偏设备自身的影响,使用该设备的目的,即在于控制和纠正跑偏现象,此时纠偏设备自身的制作质量能够对带钢跑偏控制工作的质量产生重要影响,例如辊子自身存在锥度、辊面粗糙度变化、油缸动作灵敏度等情况,影响对带钢跑偏的控制。
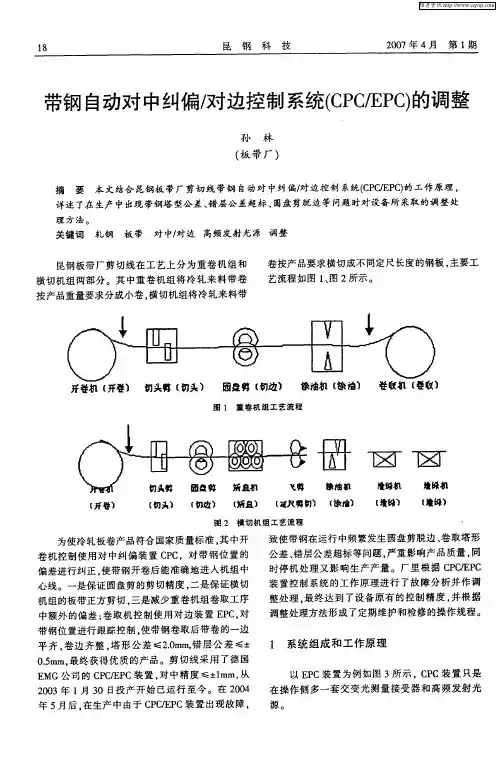
带钢连续处理机组中带钢纠偏原理分析及设备选型摘要:纠偏是保证带钢连续处理生产线正常运行的重中之重,文章对纠偏设备的纠偏方法和纠偏原理进行了分析和研究,总结了各种类型的纠偏设备纠偏执行的原理,并给出了纠偏设备设计选型的要素和原则,为纠偏设备设计提供借鉴和参考。
标签:纠偏执行原理设计选型由于带钢在运行中可能受到不可控制的力的作用,当这个作用力大于带钢与辊子间的摩擦力时,带钢就不能保持直线运行而偏离机组中心线。
导致带钢在传送过程中跑偏的干扰主要有以下方面:带钢断面不均匀(如带钢镰刀弯);辊子几何形状的影响;两传送辊轴向不平行;辊面质量的影响;两端压力不均的橡胶夹送辊的影响;带钢运送中的气流和液流的影响;塔式或卧式活套中运动辊的导向精度的影响;带钢张力波动的影响。
本文主要就带钢跑偏原理及纠偏设备选型等问题展开探讨。
一、带钢纠偏方法及纠偏原理带钢的纠偏从其检测方式上来讲可分为CPC对中纠偏装置和EPC齐边纠偏装置。
二者区别在于CPC对中纠偏即保证带钢的中心始终在机组中心线上,当带钢跑偏时,它是通过纠偏辊使跑偏的带钢在摩擦力的作用下回到机组中心来完成纠偏任务的。
而EPC齐边纠偏装置为齐边浮动卷取,即保证钢带卷的一侧边部整齐,它是通过将卷取机的卷筒中心移向跑偏的带钢中心来保证卷取整齐的。
另外,从检测原理上来讲,又可分为:电感式位置检测和光电式位置检测。
下文以光电式为例来进行说明。
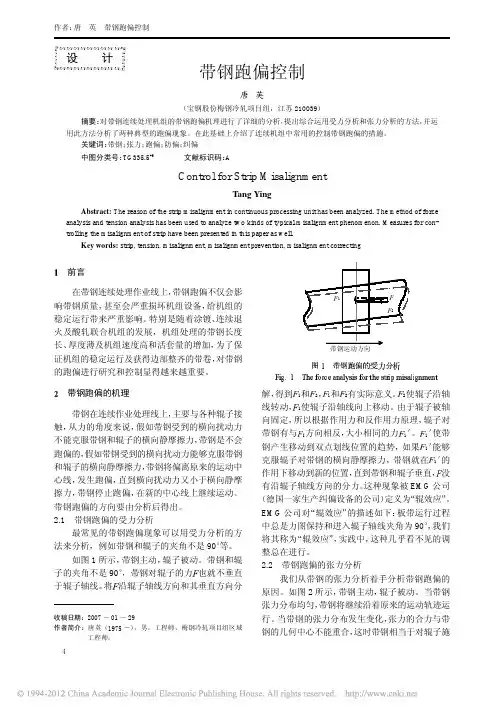
(一)光电式CPC对中纠偏CPC对中纠偏位置检测装置主要用于带钢运行过程中的纠偏检测,该装置在带钢两侧各有一个光源和光束接收器(见图1)。
光源发出平行光是以机组中心线为对称的,当带钢处于机组中心时,光束接收器收到的两侧光通量相等,其转换成的信号为零,无信号输出。
当带钢不处于机组中心时,光束接收器收到的两侧光通量就有一个差值,转换成的信号不为零,此信号经放大器放大后传递给自动矫正本体,使其调节液压缸液压油的流向,从而使液压缸动作,驱动纠偏辊侧移或旋转,使带钢受到与偏移反向的摩擦力作用而移向机组中心,从而实现带钢的自动对中。

带钢热轧时的跑偏与控制措施我跟你说啊,这带钢热轧的时候跑偏,那可真是个让人头疼的事儿。
我在那轧钢厂里待着的时候,就瞅着那带钢啊,有时候就像个调皮捣蛋的孩子,不好好走正道,偏要往一边跑。
你看啊,那车间里,到处都是热腾腾的。
大机器轰隆隆地响着,就像一群巨兽在咆哮。
工人们呢,一个个都忙得满头大汗的。
我就站在那儿,眼睛紧紧盯着那带钢。
带钢在轧辊之间穿行,那轧辊也是亮闪闪的,透着股子金属的寒光。
我旁边有个老师傅,脸黑黑的,眼睛特别有神,就像两颗黑宝石嵌在脸上。
他皱着眉头,看着那跑偏的带钢,嘴里嘟囔着:“这玩意儿,咋又跑偏了呢?”我就凑过去问他:“老师傅,这带钢为啥就跑偏了呢?”老师傅看了我一眼,叹了口气说:“这事儿啊,原因多着呢。
有时候是这带钢本身就有点歪歪扭扭的,就像一个人走路,本来腿就有点毛病,那肯定走不直溜啊。
还有时候呢,是这设备有点问题,轧辊之间的压力不均匀,就好比路不平,那带钢能走好吗?”我听了老师傅的话,就点着头。
我想啊,这得想办法控制啊。
我就又问老师傅:“那咱咋控制它不跑偏呢?”老师傅挠了挠头,然后指了指旁边的一个设备说:“你看那个,那是个侧导板,这东西可重要了。
要是调整好了,就能把带钢给管住,就像给调皮的孩子立个规矩一样。
但是啊,这调整也是个技术活,调大了不行,带钢会被夹得太紧,就像被人掐着脖子一样,走不动;调小了呢,又管不住它,它还是会跑偏。
”还有啊,那张力控制也很关键。
我就看到有个年轻的小伙子在那捣鼓着张力控制的设备。
那小伙子长得挺精神的,眼睛里透着股子机灵劲。
我就走过去问他:“小伙子,这张力控制对带钢跑偏影响大不?”小伙子眼睛亮晶晶的,兴奋地跟我说:“大叔,这影响可大了呢。
这张力就像是牵着带钢走的一根绳子,如果这绳子的力不均匀,带钢就容易被拉偏了。
就像你牵着一头牛,你这边拉得紧,那边松,牛肯定就往松的那边走了呀。
”我就想啊,这带钢热轧跑偏这事儿,真不是个简单的事儿。
这里面的门道可太多了。
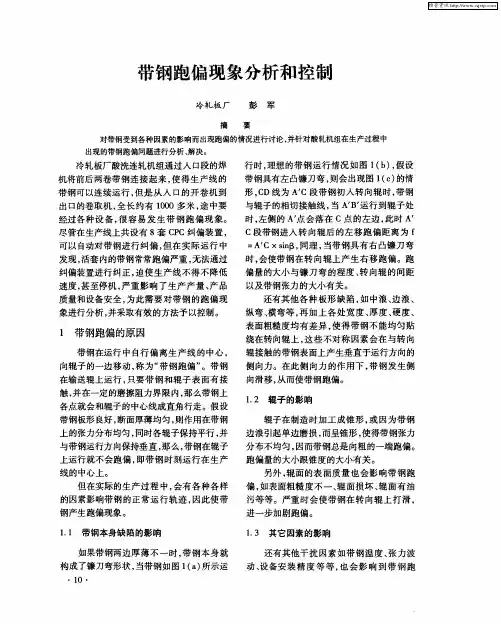
碳钢冷轧酸轧机组酸洗段带钢跑偏原因分析及纠偏措施作者:魏明星来源:《世界家苑》2018年第04期摘要:本文对酒泉钢铁集团公司碳钢薄板厂酸轧机组酸洗段带钢跑偏的情况进行讨论,并针对酸轧机组酸洗段在生产过程中出现的带钢跑偏原因进行全面分析,找出带钢在酸槽内跑偏的原因,制定方案,解决带钢在酸槽内跑偏影响生产的瓶颈难题。
关键词:酸槽;带钢跑偏;挤干辊牌坊;纠偏控制酒钢碳钢薄板厂酸轧机组通过入口步进梁、两套开卷机、闪光焊机将前后两卷带钢焊接起来,使生产线的带钢可以连续运行。
从入口开卷机经过入口活套、酸洗段、中间活套、切边剪、出口活套、轧机等到出口卷取机长度约有1600米,由于冷轧基料的变化、工艺参数的调整、机组设备的劣化很容易引起带钢跑偏。
尽管酸轧机组在生产线上设有8套CPC纠偏装置,可以自动对带钢进行纠偏,但从2010年2月开始,该生产线带钢在酸洗槽内跑偏严重,最大跑偏量达到170~180mm,通过4#CPC纠偏后跑偏量仍然超过100mm(跑偏量超过100mm系统会自动停机)。
因此,带钢跑偏已造成碳钢薄板厂酸轧机组无法正常生产。
为此需要对带钢在酸槽内的跑偏进行分析,并采取有效的方法予以控制。
一、酸洗段带钢跑偏原因分析“带钢跑偏”是指带钢在运行过程中自行偏离轧制中心线的现象。
酸轧机组的带钢在设定的张力下,正常情况应当以设定的速度沿轧制线方向运行,在运行过程中带钢对输送辊面的摩擦力和张力应相对稳定且均布。
但是,在实际运行中由于带钢板型不好,断面不均匀,各种输送辊几何尺寸超差、辊子的中心线与轧制中心线不垂直等因素,都会影响带钢的正常运行,使带钢产生跑偏现象。
经初步分析,引起带钢跑偏的原因可能有以下几点:(一)冷轧基料带钢断面不均匀、板型不规则的影响冷轧基料存在楔形、镰刀弯等缺陷,会导致带钢在输送辊上运行时,由于张力不同而引起带钢跑偏,酒钢碳钢薄板厂酸轧机组经开卷对中、入口矫直机对带钢矫正后,再由入口切头剪切去带钢头尾,以减小由于楔形、镰刀弯对带钢跑偏的影响。
浅析带钢的对中纠偏控制本文具体分析了带钢在运行过程中跑偏产生的缘由、特点及其类别。
针对带钢的跑偏现象,进行了深化讨论,提出了纠偏的措施,也探讨了各种设计方法的可行性和有效性,从而为选取最佳的设计方案供应依据。
带钢跑偏缘由分析工程设计和应用中,无论带钢外形的板形缺陷、塔形卷曲、处理线设备安装偏差及调整不当、处理工艺对带钢的影响等都会导致运动的带钢在生产线上发生偏移。
1.1.带钢的板形缺陷。
各种形式的板形缺陷主要有:带钢断面外形、平坦度、带头焊接没对齐或偏斜。
当带钢在运动过程中,它的外形并不能得到订正。
依照拱形的大小,会产生相应大小的跑偏。
1.2.设备精度。
包括转向辊、张力辊及活套车等安装精度、夹送辊压力不均、各种辊子辊面不匀称磨损等因素均会造成带钢横向跑偏。
依据带钢的运行行为,辊子上的带钢总是趋向于以90的夹角垂直辊子轴线方向运行。
事实上,辊子轴线不平行,甚至带钢拱形都会导致带钢进入辊子的角度偏离90。
偏离的大小,记为跑偏角。
<imgsrc=“file:///C:/Users/仲æ é¹ /AppData/Local/Temp/msohtmlclip1/01/clip_image 014.png”/为带钢跑偏速度,mm/s;<imgsrc=“file:///C:/Users/仲æ é¹ /AppData/Local/Temp/msohtmlclip1/01/clip_image 016.png”/为跑偏速度系数,其大小与辊子表面状态、带钢与辊子包角等有关,抱负状况下可取 1.0;<imgsrc=“file:///C:/Users/仲æ é¹ /AppData/Local/Temp/msohtmlclip1/01/clip_image 018.png”/为辊子圆周线速度,mm/s;<imgsrc=“file:///C:/Users/仲æ é¹ /AppData/Local/Temp/msohtmlclip1/01/clip_image 010.png”/跑偏角度。
连退炉带钢跑偏的分析与控制摘要:目前科技高速发展进步,连续退火装置在一定程度上满足了高速、自动化、连续化的生产需求。
采用活套装置可以有效地控制带钢的张力,在保障科学、合理的速度基础上提高产量、提高高质量,这对于带钢的生产非常重要。
然而,在连续退火生产线中常会出现带材跑偏现象,如果带钢在炉膛中出现跑偏,很可能会造成停机,严重时会造成带钢断裂,给连铸生产造成很大的麻烦。
基于这一现状,针对连退炉带钢跑偏的原因进行分析,并提出相应的防治措施,以供相关人员参考。
关键词:连退炉;带钢跑偏;控制引言:目前,在高端生产中,全辐射管、H-Nx保护气体、全辐射管的连续退火炉,产品广泛用于汽车、家电、装潢等高档行业,是目前世界上最先进、最具竞争力的高强度钢制造设备。
由于连续生产,要求长期稳定运行,导致温度制度、钢种、规格等频繁变化,导致产品稳定性波动,特别是在气温系统发生改变的时候。
因此,采用科学合理的工艺转化技术对减少带材跑偏的影响是不可替代的。
一、连退炉带钢跑偏随着工业技术的进步与革新,退火炉逐渐应用于冷轧连回生产线,使生产的连续性大大提高,产量也大大提高。
虽然连续退火技术具有连续生产的特征,但生产线较长,钢种品种繁多,生产过程中,带钢很难沿着炉区中心线进行操作,在有缺陷的情况下,炉内带材的跑偏现象较为普遍,尤其是宽、薄、硬钢材更是如此。
如果带钢在炉膛中出现跑偏还可能会会造成带钢断裂,给连铸生产造成很大的麻烦。
在此基础上,针对连续退火带钢跑偏的问题,提出相应的改进方案。
采取适当的控制措施,可以有效地控制带钢的跑偏现象,增强设备的精度,从而在今后的先进工艺中,有效地解决了带钢跑偏的问题,从而减少了企业的成本,提高了生产的效率。
二、跑偏原因分析(一)来料板型单边浪型严重或存在镰刀弯在板条宽度方向上,轧辊表面与带材之间的接触较好,使带材沿宽度方向受力均匀,不会发生偏移。
在板宽方向上有对称波形时,尽管带材在宽度上的受力不均,但对称波形位置的应力互相抵消,使带材没有跑偏的情况。
计算机自动纠偏系统在带钢卷取中的应用摘要在生产线上,带钢的位置纠偏控制是带钢连续生产的重要环节。
良好的带钢位置纠偏控制系统可以保证带钢产品的高质量。
本设计系统分析了带钢跑偏产生的原因。
结合生产现场的实际情况和现有的专家控制规律,指出以伺服阀为基础的液压控制系统在近现代相关工业领域中广泛应用。
并指出电液伺服控制系统同电子技术与控制技术相结合的向数字化的发展趋势。
带钢位置纠偏控制系统设计目的是通过光电式传感器获得一个高精度的带钢偏移信号,并驱动液压执行机构精确地完成带钢的位置纠偏。
通过对带钢位置纠偏控制系统执行机构的分析,得出电液伺服阀流量传递函数、卷取机的传递函数和其他元件的传递函数,经过整理确定了最终的带钢位置纠偏控制系统的数学模型。
在结合传统PID控制原理以及专家系统的基础上,确定了智能PI参数自整定控制方案。
通过分析PID参数对系统的作用,确定了智能型PI调节器的调整规则,从而建立起了系统仿真模型,最后仿真结果表明采用智能型PI调节器控制系统控制能够比单纯采用PID控制器的系统具有更短的响应时间、更小的超调现象和更强的抑制负载扰动的能力。
最后,本论文对现行方法中的不足进行了总结。
关键词:带钢纠偏系统电液伺服阀建模 PID控制 MATLAB仿真The application of computer automatic guiding system in strip coilingAbstractIn the production line, steel strip position correction control is an important part of continuous production. Good strip position correction control system can guarantee the high quality steel products. The reason for steel strip department was analyzed systemically. The design combine the actual situation of the production site and the existing expert control law, pointed out that the hydraulic control system based on the servo valve are widely used in the related industries field. And pointed out that the digital trend that the Electro-hydraulic servo control systems combine with the electronic technology and control technology.The design purpose of the steel strip position guiding system was to obtain a high precision departure distance of steel strip by the photoelectric width detector and displacement sensor and to control the electrical-hydraulic servo system complete accurately rectifying function. Via analyzing the elements of the electrical-hydraulic servo system, the transfer functions of the servo valve, coiling machine and other components were obtained. After finishing the final mathematical model of the steel strip position guiding system was established.Combining the PID control theory and expert system, the Intelligent PI parameters self-tuning control scheme was established. By analyzing the effect of each parameters of PID controller, the adjustment rules of the intelligent PI regulator were obtained, and via these finally founded a system simulation model. The simulation results showed the intelligent PI controller had better performance in both dynamic and static state, and it was more robust than normal PID controller.Finally, the shortcomings of existing methods are summarized..Key words: strip correction system;servo valve;modeling;PID control;MATLAB simulation1轧制自动化简介1.1轧制过程自动化的基本概念自动化一词对于我们已不陌生,因为各工业部门正在广泛地采用着不同的自动化技术。
带钢纠偏控制系统(CPC)故障分析【摘要】介绍了冷轧带钢连续酸洗机组中CPC纠偏系统的组成,分析了CPC系统故障产生的主要原因,提出了改进措施。
【关键词】酸洗;CPC;纠偏酸洗是冷轧带钢生产工艺流程中第一道工序,攀钢冷轧厂引进HITACHI公司八十年代初生产的连续酸洗机组,虽然在使用过程中经过了与DEMAG公司和ABB公司等进行了多次局部改进,但在投入生产以来,CPC系统还是暴露出了在机械和液压方面的先天缺陷,严重制约产量及质量的进一步提高。
1.CPC纠偏系统的组成CPC纠偏系统是一个完整的闭环控制系统,主要由平行光发射器、平行光接收器PLS(Parallel Light Sensor)、控制单元、液压伺服系统、纠偏机构等部分组成,如图1所示。
为确保纠偏的准确性,纠偏机构安装找正基准为机组中心线。
纠偏装置的中心位置或控制的原始位置由中心位置传感器检测。
纠偏系统工作过程中,带钢穿行在平行光发射源和平行光接收器(PLS)之间(左右各一个PLS,沿机组中心线对称布置),带钢遮挡两侧光源的量由PLS检测出来,并转化为电信号传送给控制器。
控制器对两接收单元PLS传送来的电信号之绝对差值ΔI进行PD运算和功率放大,输出纠偏信号到伺服阀,控制伺服阀液压缸的动作方向和动作量。
伺服液压缸驱动浮动机架摆动和平动,使带钢两侧受到的张力和摩擦力发生变化导致带钢位置的变化,同时也改变带钢遮挡光源的量和ΔI的变化。
2.CPC系统液压故障分析及改进措施本套酸洗机组共有七套独立的CPC液压系统,每套系统独立控制一个带钢纠偏装置,其功能是:不管引起带钢跑偏的各种扰动因素如何变化,纠偏装置都能自动调节,防止带钢跑偏。
此CPC液压控制系统全部使用EMG公司的HR100V25液压控制装置,系统原理图如图2所示。
CPC液压控制系统现场环境恶劣,原设计中考虑的纠偏能力略小,未考虑来料板形差而导致纠偏增大的状况,致使目前CPC液压系统温度高,同时伴随着故障的突发性,具体缺陷如下:①系统采用风冷冷却器,由于生产现场铁粉、灰尘多,容易堆积在冷却器散热片上,大大降低了冷却效果,致使油温较高;②泵安装在油箱内,造成液压泵有些日检查项目无法开展,而且当泵、联轴器出现故障更换时,会造成人为的油液污染,缩短伺服阀的使用寿命,同时增加故障停机时间;③此七套CPC系统均没有备用泵,任何一台泵站故障均会造成机组停机,已不能满足连续机组的生产要求。
( 安全管理 )
单位:_________________________
姓名:_________________________
日期:_________________________
精品文档 / Word文档 / 文字可改
浅析带钢的对中纠偏控制(新
版)
Safety management is an important part of production management. Safety and production are in
the implementation process
浅析带钢的对中纠偏控制(新版)
本文详细分析了带钢在运行过程中跑偏产生的原因、特点及其类别。
针对带钢的跑偏现象,进行了深入研究,提出了纠偏的措施,也探讨了各种设计方法的可行性和有效性,从而为选取最佳的设计方案提供依据。
带钢跑偏原因分析
工程设计和应用中,无论带钢形状的板形缺陷、塔形卷曲、处理线设备安装偏差及调整不当、处理工艺对带钢的影响等都会导致运动的带钢在生产线上发生偏移。
1.1.带钢的板形缺陷。
各种形式的板形缺陷主要有:带钢断面形状、平坦度、带头焊接没对齐或偏斜。
当带钢在运动过程中,它的形状并不能得到纠正。
依照拱形的大小,会产生相应大小的跑偏。
1.2.设备精度。
包括转向辊、张力辊及活套车等安装精度、夹送辊压力不均、各种辊子辊面不均匀磨损等因素均会造成带钢横向
跑偏。
根据带钢的运行行为,辊子上的带钢总是趋向于以90°的夹角垂直辊子轴线方向运行。
事实上,辊子轴线不平行,甚至带钢拱形都会导致带钢进入辊子的角度偏离90°。
偏离的大小,记为跑偏角。
为带钢跑偏速度,mm/s;为跑偏速度系数,其大小与辊子表面状态、带钢与辊子包角等有关,理想状况下可取1.0;为辊子圆周线速度,mm/s;—跑偏角度。
实际上,各种辊子在长期运行过程中,由于单边磨损大而成锥形。
由于锥形辊使带钢张力分布不均匀,使带钢总是向粗的一端跑偏,而锥度的大小影响了跑偏的速度。
1.3.张力控制
带钢张力波动,特别是由于带钢张力不足或张力控制调整不当,会引起带钢张力的强烈波动,从而造成带钢运行过程中横向跑偏。
高的单位面积张力可以消除部分带钢弯曲及本身缺陷,从而每个转向辊上带钢的横向偏差都会得到消减。
可是,由于带钢的材料属性以及用于控制带钢张力的张力辊的驱动运行的限制,带钢张力
增加是受限制的。
带钢对中纠偏控制措施
通过上述跑偏原因的分析,在实际的生产过程中,为了减小跑偏量,相应可以采取如下措施:
2.1.保证辊子圆柱表面制造精度和机组安装精度。
问题在于,即使保证了安装精度,待投产以后,由于基础下沉和辊面磨损等因素,也会直接影响初安装精度和初制造精度,因此这种方法不能从根本上解决问题。
2.2.增大张力。
这样可以减少带材跑偏,但是不能完全消除。
由于张力增大,使设备重量增大,投资也相应地增大。
2.3.放宽辊子辊面宽度。
这样可以达到粗定心,但是不经济。
2.4.降低机组速度。
机组速度过低直接影响生产效率。
上述这些措施在实际应用中,并不是十分理想,经济效果差。
实际设计当中通常采用电子液压闭环控制系统来进行纠偏。
常用的带钢对中纠偏控制方式
在实际应用中,通常有四种常用的对中纠偏控制方式:
3.1.机械式:如能自动定心的双锥辊,导向轨等。
3.2.电动式:采用光电检测器,将偏离信号送至控制柜,从而控制直流电机进行纠偏。
3.3.气液方式:采用气动检测喷嘴,通过膜片控制射流管喷射的油压推动滑阀控制油缸进行纠偏。
3.4.光电液方式:采用光电检测器将偏离信号经放大器放大,控制电液伺服阀推动油缸进行纠偏。
这四种控制方式中前三种纠偏速度较慢,满足不了现代化高速生产的需要。
而第四种控制方式采用的是电液伺服控制,这种控制方式的信号传输快,电反馈和校正方便,它的检测精度高,检测光电头距离大,可达一米左右,可直接方便的装在带钢运行线路上。
而且系统动态性能好。
运用光电液方式来控制对中纠偏的好处在于采用连续的闭环控制,首先通过光电传感器测出带钢位置偏差,并将偏差值变为电信号后输入到电液伺服系统,伺服系统中伺服比例阀根据信号大小驱动液压缸,使传动装置作相应的移动,这样带钢可准确地行进在预
先调整好的位置上。
光电液这一常用的对中纠偏控制方式,可以归纳为以下三种:
3.4.1.开卷控制
为了使带钢开卷后准确地送入加工生产线,通常要安装对中(CPC)或对边纠偏装置(EPC),对带钢位置的偏差进行纠正。
开卷机附近有大量的辅助设备,不可避免地使测量系统安装在固定导向辊后面,测量系统的调整过程因而产生时间延迟,这将极大的影响闭环的稳定性,尤其是带钢低速时。
针对这种现象,采用时间差补偿技术,可以在控制回路中解决不同速度的带钢的控制偏差及卷筒的位置调节。
通过电液伺服阀及通过伺服油缸驱动开卷机,使卷筒横向移送,有效地防止了跑偏现象。
3.4.2.中间纠偏控制
为了控制带钢在许可的限定范围内行进,通常在加工生产线的中间位置安装对中纠偏装置,使带钢重新回到预定位置上。
纠偏辊要产生足够的力矩,改变带钢的位置,但又不影响带钢质量,纠偏控制器比较当前值和设定值,并计算其偏差,控制放大器输出信号,
经功率放大器转换成电液伺服阀要求的范围,伺服阀控制液压油的比例流动到伺服油缸,从而产生足够的控制力矩以快速移动设备。
3.4.3.卷取机控制
为了使带钢卷取后卷边平整,通常要安装对边纠偏装置,对带钢位置进行跟踪,使带卷的一边平齐。
其对中纠偏方式同开卷机控制。
带钢跑偏的原因虽然是多方面的,但是只要我们在实际的应用当中,采用合理的对中纠偏解决方案,“跑偏”这一现象是可以被消除的。
云博创意设计
MzYunBo Creative Design Co., Ltd.。