X25045
- 格式:pdf
- 大小:131.68 KB
- 文档页数:4

X25045芯片简介X25045芯片简介X25045是美国Xicor 公司的生产的标准化8脚集成电路,它将EEPROM 、看门狗定时器、电压监控三种功能组合在单个芯片之内,大大简化了硬件设计,提高了系统的可靠性,减少了对印制电路板的空间要求,降低了成本和系统功耗,是一种理想的单片机外围芯片。
X25045引脚如图1所示。
其引脚功能如下。
CS :片选择输入;SO :串行输出,数据由此引脚逐位输出;SI :串行输入,数据或命令由此引脚逐位写入X25045;SCK :串行时钟输入,其上升沿将数据或命令写入,下降沿将数据输出;WP :写保护输入。
当它低电平时,写操作被禁止;Vss :地;Vcc :电源电压;RESET :复位输出。
X25045在读写操作之前,需要先向它发出指令,指令名及指令格式如表1所示。
X25045看门狗电路设计及编程X25045硬件连接图如图2所示。
X25045芯片内包含有一个看门狗定时器,可通过软件预置系统的监控时间。
在看门狗定时器预置的时间内若没有总线活动,则X25045将从RESET 输出一个高电平信号,经过微分电路C2、R3输出一个正脉冲,使CPU 复位。
图2电路中,CPU 的复位信号共有3个:上电复位(C1、R2 ,人工复位(S、R1、R2 和Watchdog 复位(C2、R3 ,通过或门综合后加到RESET 端。
C2、R3的时间常数不必太大,有数百微秒即可,因为这时CPU 的振荡器已经在工作。
看门狗定时器的预置时间是通过X25045的状态寄存器的相应位来设定的。
如表2所示,X25045状态寄存器共有6位有含义,其中WD1、WD0和看门狗电路有关,其余位和EEPROM 的工作设置有关。
X25045状态寄存器WD1=0,WD0=0,预置时间为1.4s 。
WD1=0,WD0=1,预置时间为0.6s 。
WD1=1,WD0=0,预置时间为0.2s 。
WD1=1,WD0=1,禁止看门狗工作。
万年历数字钟及可调时钟系统一、引言万年历数字钟是一种用万年历时钟芯片实现年、月、日、时、分、秒计时,并通过单片机处理后送给显示芯片显示的装置,与机械式时钟相比具有更高的准确性和直观性,且具有更长的使用寿命。
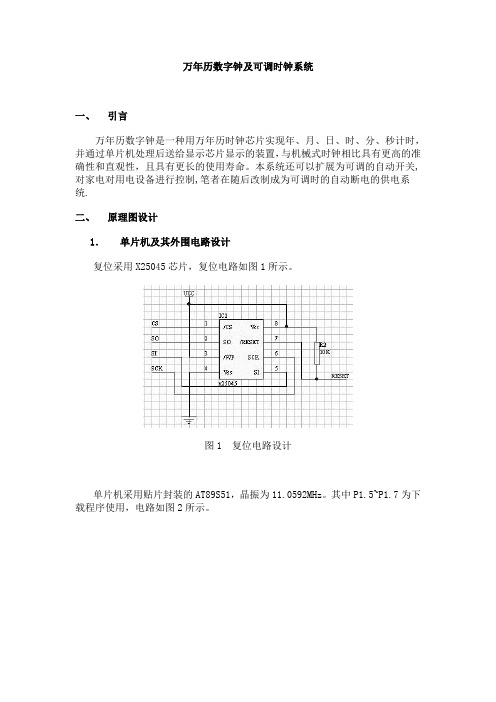
本系统还可以扩展为可调的自动开关,对家电对用电设备进行控制,笔者在随后改制成为可调时的自动断电的供电系统.二、原理图设计1.单片机及其外围电路设计复位采用X25045芯片,复位电路如图1所示。
图1 复位电路设计单片机采用贴片封装的AT89S51,晶振为11.0592MHz。
其中P1.5~P1.7为下载程序使用,电路如图2所示。
图2 单片机89S51外围电路设计2.时钟芯片电路设计时钟芯片采用PCF8563,晶振采用32.768K,电容使用15pf。
PCF8563 是PHILIPS 公司推出的一款工业级内含I2C 总线接口功能的具有极低功耗的多功能时钟/日历芯片。
内部时钟电路、内部振荡电路、内部低电压检测电路(1.0V)以及两线制I2C 总线通讯方式,不但使外围电路及其简洁,而且也增加了芯片的可靠性。
同时每次读写数据后,内嵌的字地址寄存器会自动产生增量。
电路如图3所示。
图3 时钟芯片电路设计3.显示芯片电路设计显示芯片采用ZLG7289,晶振为12MHz。
ZLG7289A 是广州周立功单片机发展有限公司自行设计的,具有SPI 串行接口功能的可同时驱动8 位共阴式数码管(或64 只独立LED )的智能显示驱动芯片,该芯片同时还可连接多达64 键的键盘矩阵,单片即可完成LED 显示﹑键盘接口的全部功能。
电路如图4所示。
图4 显示芯片电路设计4.双电源电路设计系统采用双电源,平时使用V1=10V的外接电源,停电时使用电池,由V2输入。
电池有6节,其电压为9V。
当电池电压低于6V时,LED亮,说明电池电量不足。
电路如图5所示。
图5 双电源电路设计三、程序设计程序开始时先对系统初始化,并设置好各种中断。
下步操作主要是对时钟芯片进行操作,首先要给时钟芯片设置初值,时钟芯片便自行计数。

基于单片机的晶闸管触发器的设计1 引言晶闸管也叫可控硅整流器.是目前工业应用中最为广泛的大功率变换器件。
晶闸管在烧结炉、电弧炉等整流场合主要采用移相触发控制,即通过调节晶闸管导通时刻的相位实现控制输出。
传统的晶闸管触发器采用模拟控制电路,无法克服其固有缺点。
数字式控制电路与模拟式相比,主要优点是输出波形稳定和可靠性高,但其缺点是电路比较复杂,移相触发角较大时控制精度不高。
随着单片机技术的发展,由单片机组成的控制电路的优势越明显,除具有与数字式触发电路相同的优点外,更因其移相触发角通过软件计算完成,触发电路结构简单,控制灵活,温漂影响小,控制精度可通过软件补偿,移相范围可任意调节等特点,目前已获得业界的广泛认可。
以三相桥式全控整流电路为例,介绍应用单片机组成晶闸管触发器硬件电路的设计,以及软件实现移相触发脉冲控制的方法。
2 单片机触发器的组成单片机控制的晶闸管触发器主要由同步信号检测、CPU硬件电路、复位电路和触发脉冲驱动电路4部分组成,如图l所示。
CPU通过检测电路获知触发信号,依据所要控制的电路要求,通过编程实现预定的程序流程,在相应时间段内通过单片机I/O端输出触发脉冲信号,复位电路可保证系统安全可靠的运行。
3 移相触发脉冲的控制原理相位控制要求以变流电路的自然换相点为基准,经过一定的相位延迟后,再输出触发信号使晶闸管导通。
在实际应用中,自然换相点通过同步信号给出,再按同步电压过零检测的方法在CPU中实现同步,并由CPU控制软件完成移相计算,按移相要求输出触发脉冲。
图2为三相桥式全控整流电路,触发脉冲信号输出的时序也可由单片机根据同步信号电平确定,当单片机检测到A相同步信号时,输出脉冲时序通常采用移相触发脉冲的方法,即用一个同步电压信号和一个定时器完成触发脉冲的计算。
这在三相电路对称时是可行的。
因为三相完全对称,各相彼此相差120°,电路每隔60°换流一次,且换流的时序事先已知。

X25045编程器的制作摘要介绍X25045的编程特性以及用单片机GMS97C2051制作的编程器。
关键词单片机E2PROM 编程1 引言X25045是美国Xicor公司的产品,它将三种功能:电压监控、看门狗定时器和E2PROM 组合在单个芯片之内。
因其体积小、占用I/O口少等优点已被广泛应用于工业控制、仪器仪表等领域,是一种理想的单片机外围芯片。
为了对X25045内的E2PROM编程,用GMS97C2051单片机制作了一个简易编程器,该编程器与PC的串行口相接,编程数据可通过PC机写入X25045的E2PROM。
2 X25045简介2.1 X25045引脚:芯片选择输入;SO:串行输出;SI:串行输入;SCK:串行时钟输入;:写保护输入;Vss:地;Vcc:电源电压;RESET:复位输出。
2.2 X25045工作原理X25045内含512×8的串行E2PROM,可以直接与微控制器的I/O口串行相接。
X25045内有一个位指令寄存器,该寄存器可以通过SI来访问。
数据在SCK的上升沿由时钟同步输入,在整个工作期内,必须是低电平且必须是高电平。
如果在看门狗定时器预置的超时时间内没有总线的活动,那么X25045将提供复位信号输出。
X25045内部有一个“写使能”锁存器,在执行写操作之前该锁存器必须被置位,在写周期完成之后,该锁存器自动复位。
X25045还有一个状态寄存器,用来提供X25045状态信息以及设置块保护和看门狗的超时功能。
表1 X25045的指令集2.3 X25045的读时序(a)读E2PROM的时序(b)读状态寄存器的时序图2 X25045读时序2.4 X25045的写时序(a)写使能锁存器的时序(b)字节写操作的时序图3 X25045写时序2.5 复位操作当Vcc降至门限电压以下或看门狗定时器已达到编程的极限值,X25045的RESET引脚将输出高电平。
3 X25045编程器的组成及原理X25045编程器主要由单片机、MAX232、PS7219和LED等组成,如图4所示(虚线框部分)。

多功能器件X25045特点及应用
沈永滨;关志杰
【期刊名称】《电测与仪表》
【年(卷),期】1999(036)003
【摘要】讨论了智能仪表设计中的一般性问题。
通过新型器件的运用,使单片机系统的设计更加紧凑,性能更加完善,为单片机系统的设计提供一种新的思路。
【总页数】3页(P55-56,25)
【作者】沈永滨;关志杰
【作者单位】哈尔滨理工大学;哈尔滨电工仪表研究所
【正文语种】中文
【中图分类】TP216.02
【相关文献】
1.多功能器件X25045及其在总线节点中的应用 [J], 王俊波;王红蕾
2.基于多功能器件X25045 的智能阀门定位器设计 [J], 廖正军;薛心喜
3.与单片机配套的多功能集成电路X25045 [J], 李学海
4.多功能器件X25045在智能阀门定位器上的应用 [J], 廖正军;薛心喜
5.多功能电致变色器件:从多器件到单器件集成 [J], 范宏伟;李克睿;侯成义;张青红;李耀刚;王宏志
因版权原因,仅展示原文概要,查看原文内容请购买。

SPI接口应用之一---看门狗芯片X25045hadao 发表于 2006-5-8 0:08:41一、引脚定义及通信协议SO:串行数据输出脚,在一个读操作的过程中,数据从SO脚移位输出。
在时钟的下降沿时数据改变。
SI:串行数据输入脚,所有的操作码、字节地址和数据从SI脚写入,在时钟的上升沿时数据被锁定。
SCK:串行时钟,控制总线上数据输入和输出的时序。
/CS :芯片使能信号,当其为高电平时,芯片不被选择,SO脚为高阻态,除非一个内部的写操作正在进行,否则芯片处于待机模式;当引脚为低电平时,芯片处于活动模式,在上电后,在任何操作之前需要CS引脚的一个从高电平到低电平的跳变。
/WP:当WP引脚为低时,芯片禁止写入,但是其他的功能正常。
当WP引脚为高电平时,所有的功能都正常。
当CS为低时,WP变为低可以中断对芯片的写操作。
但是如果内部的写周期已经被初始化后,WP变为低不会对写操作造成影响。
二、硬件连接三、程序设计状态寄存器:WIP:写操作标志位,为1表示内部有一个写操作正在进行,为0则表示空闲,该位为只读。
WEL:写操作允许标志位,为1表示允许写操作,为0表示禁止写,该位为只读。
BL0,BL1:内部保护区间的地址选择。
被保护的区间不能进行看门狗的定时编程。
WD0,WD1:可设定看门狗溢出的时间。
有四种可选择:1.4s,600ms,200ms,无效。
操作码:WREN 0x06 设置写允许位WRDI 0x04 复位写允许位RDSR 0x05 读状态寄存器WRSR 0x01 写状态寄存器READ 0x03/0x0b 读操作时内部EEPROM页地址WRITE 0x02/0x0a 写操作时内部EEPROM页地址程序代码:#i nclude <reg51.h>sbit CS= P2^7;sbit SO= P2^6;sbit SCK= P2^5;sbit SI= P2^4;#define WREN 0x06 //#define WRDI 0x04 //#define RDSR 0x05 //#define WRSR 0x01 //#define READ0 0x03 //#define READ1 0x0b //#define WRITE0 0x02 //#define WRITE1 0x0a //#define uchar unsigned charuchar ReadByte() //read a byte from device{bit bData;uchar ucLoop;uchar ucData;for(ucLoop=0;ucLoop<8;ucLoop++){SCK=1;SCK=0;bData=SO;ucData<<=1;if(bData){ ucData|=0x01; }}return ucData;}void WriteByte(uchar ucData)//write a byte to device {uchar ucLoop;for(ucLoop=0;ucLoop<8;ucLoop++){if((ucData&0x80)==0) //the MSB send first{SI=0;}else{SI=1;}SCK=0;SCK=1;ucData<<=1;}}uchar ReadReg() //read register{uchar ucData;CS=0;WriteByte(RDSR);ucData=ReadByte();CS=1;return ucData;}uchar WriteReg(uchar ucData) //write register{uchar ucTemp;ucTemp=ReadReg();if((ucTemp&0x01)==1) //the device is busyreturn 0;CS=0;WriteByte(WREN);//when write the WREN, the cs must have a high lev elCS=1;CS=0;WriteByte(WRSR);WriteByte(ucData);CS=1;return 1;}void WriteEpm(uchar cData,uchar cAddress,bit bRegion)/* 写入一个字节,cData为写入的数,cAddress为写入地址,bRegion为页 */{while((ReadReg()&0x01)==1); //the device is busyCS=0;WriteByte(WREN); //when write the wren , the cs must have a high l evelCS=1;CS=0;if(bRegion==0){ WriteByte(WRITE0);} //write the page addrelse{WriteByte(WRITE1);}WriteByte(cAddress);WriteByte(cData);SCK=0; //CS=1;}uchar ReadEpm(uchar cAddress,bit bRegion)/* 读入一个字节,cAddress为读入地址,bRegion为页 */{uchar cData;while((ReadReg()&0x01)==1);//the device is busyCS=0;if(bRegion==0){WriteByte(READ0); }else{WriteByte(READ1);}WriteByte(cAddress);cData=ReadByte();CS=1;return cData;}main(){WriteReg(0x00);//set the watchdog time as 1.4sCS=1;CS=0; //reset the watchdog}基于X25045的新型看门狗电路图作者:重庆三峡学院应用技术学院谢辉来源:不详点击数:更新时间:2007年02月14日看门狗(watchdog)电路是嵌入式系统需要的抗干扰措施之一。
液体点滴速度控制教学实验装置的设计◆王 强单片机的教学实验在信息电子专业的教学中占有十分重要的地位,为了使同学们掌握单片机的开发系统的基本知识,本文设计了一个液体点滴速度自动控制的实验装置,该装置能够由人工设定点滴速度,并能根据监测到的点滴速度通过控制算法达到设定速度,而且调整时间较快。
该装置不仅可以很好地应用到教学实验中,并且还可以推广到实际应用中。
点滴速度自动控制装置教学装置一、前言在传统医疗过程中,给病人输液一直采用人工观测和人工调节点滴的速度,点滴的监控受到医务人员责任心和熟练程度的限制,给病人和医疗过程带来一定的安全隐患。
同时,现阶段实践性教学环节有它的薄弱之处,大都处于滞后、分散、针对性不强、系统性不够、综合性不强等低层次循环状态,师生重视程度不够,一方面,造成学生找不到工作,另一方面,某些岗位的高级应用技术人才紧缺。
为此,必须充分重视实践教学环节,充分发挥出实践性教学的最大功效。
其有效措施之一,就是配合一些优秀的实验教学模型,开展设计性、系统性、综合性的实验和实习教学。
对实验教学模型有几点主要要求:(1)系统性;(2)新技术的综合性;(3)设计性;(4)直观性。
本文将89C51单片机用于对输液实验装置的设计,实现键盘设定输液速度,通过传感系统来确定点滴速度和对液位警戒线的检测,利用LED 数码显示屏实时显示,通过电机控制储液瓶的高度来达到控速的目的,整个系统结构简单,易于实现。
二、硬件设计系统硬件结构框图如图1所示。
主要包括单片机系统、液滴探测、液位检测、报警输出、步进电机控制、看门狗等电路。
单片机系统选用AT89C51,内含4K 字节的EEPRO M ,便于研制阶段反复调试和修改;为提高系统的可靠性,使得当系统掉电、上电后程序可以恢复正常,本文设计了看门狗硬件电路。
图1 系统的整体结构图1.点滴速度检测滴速检测是采用LM339过零比较电路,采用红外发射—接收对管作为液滴检测器件,根据接收到的光强的强弱判断是否有液滴滴下。
18科技资讯 SCIENCE & TECHNOLOGY INFORMATION2009 NO.32SCIENCE & TECHNOLOGY INFORMATION信 息 技 术在单片机系统中,通常需要在外围连接一个看门狗电路,以防止程序走飞;同时,单片机系统也需要监测电源电压的情况,以便系统掉电时能及时复位,从而避免因电源波动影响系统的正常工作;另外,单片机应用时,需要提前设置一些参数,比如时钟初值、控制算法参数等,一旦设置完成后,这些参数往往需要掉电保存。
X25045是美国Xicor 公司出品的新型可编程看门狗监控EEPROM 芯片。
X25045把常用的看门狗定时、电压监控和EEPROM 三种功能组合在单个封装之内,从而降低了系统成本并减少了电路板空间的要求。
我们曾将X25045应用到“步进电机细分驱动器”、“食堂收费终端”中,在实际使用中收到了良好的效果。
1 X25045的结构及特点1.1引脚功能X25045是Xicor 公司生产的微处理器监控电路,采用8脚DIP 封装,各引脚见图4,其作用分别是:CS:芯片选择输入引脚;SO:串行输出引脚,在读周期内,数据在此引脚上输出,数据由串行的时钟的下降沿同步输出;WP:写保护输入引脚,当WP 为低电平时,X25045的写操作被禁止;VSS:地引脚;SI:串行输入引脚,所有操作码、字节地址以及写入存储器的数据在此引脚上输入,串行时钟的上升沿锁存SI 数据;SCK:串行时钟引脚,用于数据输入和输出的串行总线定时;RESET:复位输出引脚,高电平有效;VCC:电源电压。
1.2主要特点(1)可编程的看门狗定时器;(2)低Vcc 检测;(3)512×8位串行E2PROM;(4)低功耗CMOS:10μA 备用电流;3mA 工作电流;(5)电源电压范围宽:2.2V 到5.5V;(6)块锁定:可以保护1/4,1/2或所有EEPROM 阵列;(7)内建写保护:上电/掉电保护电路、写锁存、写保护引脚;(8)高可靠,数据保存期为100年;(9)8引脚小型DIP 封装;(10)X25045为RESET 复位控制。
电子车速里程表的单片机实现方案摘要:介绍了一个基于单片机的电子式转速里程表实现方案,讨论了里程计数的原理和转速指示原理,给出了用单片机AT89C2051和LM1819驱动器设计的汽车转速里程表的具体电路原理图。
关键词:转速里程表;空气轴表芯;LM1819;驱动器;单片计算机1概述传统的汽车转速里程表的功能有两个,一是用指针指示汽车行驶的瞬时车速,二是用机械计数器记录汽车行驶的累计里程。
现代汽车正向高速化方向发展,随着车速的提高,用软轴驱动的传统车速里程表受到前所未有的挑战,这是因为软轴在高速旋转时,由于受钢丝交变应力极限的限制而容易断裂,同时,软轴布置过长会出现形变过大或运动迟滞等现象,而且,对于不同的车型,转速里程表的安装位置也会受到软轴长度及弯曲度的限制。
凡此种种,使得基于非接触式转速传感器的电子式转速里程表得以迅速发展。
2里程累计实现原理车速里程表的速比表示的是:车速里程表转轴(软轴)在汽车行驶一公里时所转过的转数。
基于单片机的车速里程表采用霍尔型非接触式转速传感器。
这种车速里程表转轴每转一圈,霍尔传感器将感应发出8个脉冲。
现在以速比为1:624的车型为例汽车行驶一公里则霍尔传感器发出的脉冲数共为8×624=4992个,或者说,每个脉冲代表了1/4992公里的里程。
将这些脉冲信号当作外部中断源输入给单片机,使每个脉冲产生一个中断,并通过中断服务程序对每个脉冲进行计数,这样,当计满4992时,表明汽车行驶了1公里,然后再给累计单元加一,并存入EEPROM单元,最后通过刷新LCD液晶显示器,即可实现里程计数功能。
但在编程时要注意,MCS-51系列单片机的外部中断有两种触发方式,即电平触发和边沿触发,本设计选用边沿触发方式,即采用负跳变引起中断。
3车速测量及指示原理车速指示可采用双线圈汽车转速表头,它由空气轴表芯和驱动电路组成,空气轴表芯通常由三部分组成:磁铁、与转轴相连的指针和两个互成九十度的线圈。