视觉slam介绍58页PPT
- 格式:ppt
- 大小:8.50 MB
- 文档页数:58
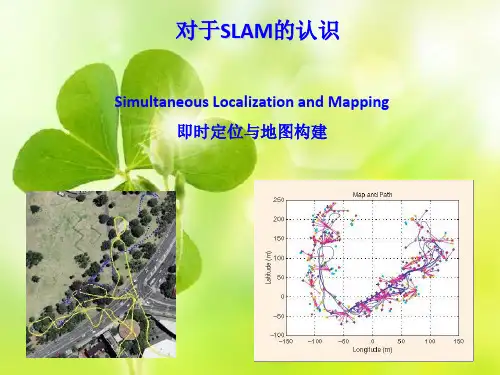
SLAM简介SLAM简介1. 关于SLAMSLAM是同步定位与地图构建(Simultaneous Localization And Mapping)的缩写,最早由Hugh Durrant-Whyte 和 John J.Leonard 提出。
SLAM主要用于解决移动机器人在未知环境中运行时定位导航与地图构建的问题。
SLAM通常包括如下几个部分,特征提取,数据关联,状态估计,状态更新以及特征更新等。
对于其中每个部分,均存在多种方法。
针对每个部分,我们将详细解释其中一种方法。
在实际使用过程中,读者可以使用其他的方法代替本文中说明的方法。
这里,我们以室内环境中运行的移动机器人为例进行说明,读者可以将本文提出的方法应用于其他的环境以及机器人中。
SLAM既可以用于2D运动领域,也可以应用于3D运动领域。
这里,我们将仅讨论2D领域内的运动。
2. 机器人平台在学习SLAM的过程中,机器人平台是很重要的,其中,机器人平台需要可以移动并且至少包含一个测距单元。
我们这里主要讨论的是室内轮式机器人,同时主要讨论SLAM的算法实现过程,而并不考虑一些复杂的运动模型如人形机器人。
在选择机器人平台时需要考虑的主要因素包括易用性,定位性能以及价格。
定位性能主要衡量机器人仅根据自身的运动对自身位置进行估计的能力。
机器人的定位精度应该不超过2%,转向精度不应该超过5%。
一般而言,机器人可以在直角坐标系中根据自身的运动估计其自身的位置与转向。
从0开始搭建机器人平台将会是一个耗时的过程,也是没有必要的。
我们可以选择一些市场上成熟的机器人开发平台进行我们的开发。
这里,我们以一个非常简单的自己开发的机器人开发平台讨论,读者可以选择自己的机器人开发平台。
目前比较常见的测距单元包括激光测距、超声波测距、图像测距。
其中,激光测距是最为常用的方式。
通常激光测距单元比较精确、高效并且其输出不需要太多的处理。
其缺点在于价格一般比较昂贵(目前已经有一些价格比较便宜的激光测距单元)。


slam原理SLAM原理。
SLAM(Simultaneous Localization and Mapping)即同时定位与地图构建,是指机器人或无人驾驶汽车等自主移动设备在未知环境中同时实现自身定位和环境地图构建的过程。
SLAM技术在无人驾驶、智能导航、室内定位等领域有着广泛的应用,是实现自主移动设备智能化的关键技术之一。
SLAM的基本原理是通过传感器获取环境信息,包括视觉、激光雷达、超声波等传感器,利用这些信息实现自身定位和地图构建。
在SLAM中,自身定位是指确定自身在环境中的位置和姿态,地图构建是指利用传感器信息构建环境的地图。
通过不断地获取传感器信息,并结合运动模型和观测模型,实现自身定位和地图构建的过程。
在SLAM中,传感器起着至关重要的作用。
视觉传感器能够获取环境的图像信息,通过图像处理和特征提取,实现对环境的感知和地图构建;激光雷达能够获取环境的三维点云信息,通过对点云数据的处理和分析,实现对环境的感知和地图构建;超声波传感器能够获取环境的距离信息,通过对距离数据的处理和分析,实现对环境的感知和地图构建。
不同的传感器在SLAM中各有优势和局限,可以根据具体的应用场景选择合适的传感器组合。
SLAM的实现过程中,运动模型和观测模型是至关重要的。
运动模型描述了自主移动设备的运动规律,包括平移和旋转;观测模型描述了传感器获取环境信息的规律,包括特征提取和匹配。
通过运动模型和观测模型,可以将传感器信息和自身运动进行融合,实现自身定位和地图构建的精确度和稳定性。
SLAM技术的发展离不开计算机视觉、机器学习和传感器技术的进步。
计算机视觉为SLAM提供了强大的图像处理和特征提取能力,机器学习为SLAM提供了强大的模式识别和数据分析能力,传感器技术为SLAM提供了丰富的环境感知和信息获取能力。
这些技术的不断进步和融合,推动了SLAM技术的不断发展和应用。
总之,SLAM作为一种重要的自主移动设备技术,具有广阔的应用前景和发展空间。
SLAM算法什么是SLAM算法SLAM(同时定位与地图构建)是一种自主机器人或无人驾驶车辆(Autonomous Vehicles, AVs)能够在未知环境中同时实现自身位置定位与地图构建的算法。
SLAM算法是一个关键的技术,让机器人或AV能够在没有先验地图或GPS定位的情况下,通过使用传感器数据实现实时的定位与地图构建。
传统上,用于SLAM算法的传感器包括摄像头、激光雷达、惯性测量单元(Inertial Measurement Unit, IMU)和里程计。
这些传感器将机器人周围的环境信息转换为数字信号,并且通过机器人自身的运动模型实现对机器人位置的估计。
SLAM算法使用这些传感器数据和运动估计来构建地图,并且随着时间的推移不断更新地图和机器人的位置估计。
SLAM算法的应用领域SLAM算法在许多领域中都有广泛的应用,包括机器人导航、无人驾驶车辆、增强现实(Augmented Reality, AR)和虚拟现实(Virtual Reality, VR)等。
以下是SLAM算法的一些具体应用领域:•机器人导航:SLAM算法使机器人能够在未知环境中进行自主导航,如无人机、巡逻机器人等。
•无人驾驶车辆:SLAM算法在无人驾驶车辆中起着关键作用,它允许车辆实时定位和地图构建,并且根据地图进行路径规划和避障。
•增强现实:SLAM算法可用于识别和追踪物体,从而在用户的视觉场景中添加虚拟对象。
•虚拟现实:SLAM算法可以将虚拟对象与现实世界对齐,从而实现用户在虚拟场景中的自由移动。
SLAM算法的挑战和方法SLAM算法面临着一些挑战,包括传感器噪声、数据关联、计算复杂度和环境动态性等。
为了克服这些挑战,SLAM算法研究者提出了许多方法和技术。
以下是一些常用的SLAM算法方法:•基于滤波器的方法:这些方法使用状态估计滤波器,如卡尔曼滤波器和粒子滤波器,来对机器人的位置进行估计和校正,并且对地图进行构建和更新。
•基于优化的方法:这些方法通过最小化误差函数来估计机器人位置和地图,例如最小二乘法(Least Squares)和非线性优化算法(如梯度下降)。
视觉SLAM的分类引言随着计算机视觉和机器人技术的发展,视觉SLAM(Simultaneous Localization and Mapping,即时定位与建图)作为一种重要的感知和导航技术,被广泛应用于自主导航、增强现实、机器人导航等领域。
视觉SLAM通过从视觉传感器获取图像信息,并将其与运动估计算法相结合,实现同时定位机器人的位置和构建环境地图。
在这篇文章中,我们将对视觉SLAM的分类进行全面、详细、完整且深入地探讨。
单目视觉SLAM概述单目视觉SLAM是指仅通过单个摄像头获取的图像信息来实现同时定位和建图的技术。
相对于使用多个传感器的多传感器SLAM来说,单目视觉SLAM更加具有挑战性,因为单个视角往往无法提供足够的几何信息来进行定位和建图。
方法•特征点法:基于特征点的方法是最常用的单目视觉SLAM方法之一。
通常通过提取图像中的关键点,并使用特征描述子来进行特征匹配和跟踪。
同时,该方法也会估计摄像头的运动和三维场景点的位置,以实现定位和建图。
•直接法:直接法是另一种常用的单目视觉SLAM方法。
该方法通过将图像像素值直接用于估计摄像头的运动和场景的深度信息。
与特征点法相比,直接法能够获得更多的几何信息,但该方法对光照变化和纹理稀疏场景比较敏感。
应用•自主导航:单目视觉SLAM可以用于机器人的自主导航。
通过结合图像信息和运动估计,机器人可以实时地感知自身位置和周围环境,从而进行路径规划和避障。
•增强现实:单目视觉SLAM也可以应用于增强现实。
通过追踪相机的运动以及对场景中物体的建模,可以将虚拟对象与真实世界进行融合,使用户能够在现实世界中与虚拟对象进行交互。
双目视觉SLAM概述双目视觉SLAM是指基于双目(左右)摄像头获取的图像信息来实现同时定位和建图的技术。
相对于单目视觉SLAM来说,双目视觉SLAM可以通过摄像头之间的视差来获得更多的三维信息,从而提高定位和建图的精度。
方法•立体匹配法:双目视觉SLAM中最常用的方法是立体匹配法。
超全SLAM技术及应用介绍SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。
问题可以描述为:将一个机器人放入未知环境中的未知位置,是否有方法让机器人一边逐步描绘出此环境完全的地图,所谓完全的地图〔a consistent map〕是指不受障碍行进到房间可进入的每个角落。
SLAM最早由Smith、Self和Cheeseman于1988年提出。
由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
词语解释Simultaneous Localization and MappingSimultaneous Localization and Mapping, 同步定位与建图。
SLAM问题可以描述为: 机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的根底上建造增量式地图,实现机器人的自主定位和导航。
Scanning Laser Acoustic MicroscopeScanning Laser Acoustic Microscope, 激光扫描声学显微镜。
激光扫描声学显微镜是一种强有力的广泛应用于诸如工业用材料和生物医学领域的无损检测工具,其使用的频率范围为10MHz ~ 500MHz。
Lymphocyte Activation MoleculeLymphocyte Activation Molecule, 医学用语。
Supersonic Low Altitude MissileSLAM — Supersonic Low Altitude Missile〔超音速低空导弹〕的缩写,是美国的一项导弹研制方案。
Symmetrically Loaded Acoustic ModuleSLAM是Symmetrically Loaded Acoustic Module的英文缩写 [1] ,中文意思是平衡装载声学模块。