基于磁阻芯片和MSP430单片机的电子罗盘设计_郭检柟
- 格式:pdf
- 大小:1.10 MB
- 文档页数:4
三轴磁阻电子罗盘的设计和误差补偿邵婷婷【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2014(14)7【摘要】A 3-axes tilt compensation magnetoresistive electronic compass is developed,whose error is compensated.The magnetoresistive sensor HMC1043 and MEMS accelerometer ADXL203 are used to be the sampling module,and MSP430F149 is used to be the process-ing module,which can acquire and process the magnetic field intensity and gravity acceleration respectively,and the course angle and atti-tude angle are displayed by bining classic ellipse hypothesis method and Fourier series model,the error is compensa-ted.The experiment result shows that the designed electronic compass can display the carrier's course angle and attitude angle at real time,which achieves integration and intelligence,and the heading error can achieve ±0.6°steadily.%设计了一款具有倾斜补偿功能的三轴磁阻电子罗盘,并对样机系统做了误差补偿。
浙注创扌储离院本科生毕业论文(设计)开题报告题目:基于AT89S52单片机的电子罗盘系统的设计与实现学生姓名******0*** *200 ***指导教师******二级学院信息学院专业名称计算机科学与技术班级0* 计算机*班2012年3月浙江财经学院毕业论文(设计)对学生的要求1.学生应充分认识毕业论文(设计)工作的重要性,学生本人应对工作的质量负责,有高度的责任感,在规定的时间内全面完成毕业论文(设计)的各项工作,争取优异成绩。
2.学生在接到毕业论文(设计)任务书后,在领会课题的基础上,进一步了解任务的范围及涉及的素材,应向指导教师提呈调查研究提纲,查阅、收集、整理、归纳资料,学生在毕业论文(设计)中都应结合毕业论文(设计)课题进行必要的外文阅读以及完成规定的外文资料翻译和文献综述。
3.学生应在充分调研的基础上编写毕业论文(设计)工作计划,列出完成毕业论文(设计)任务所采取的方案与步骤,认真做好论文提纲。
4.学生应主动接受教师的检查与指导,定期向指导教师汇报工作进程,听取教师对?作的意见和指导。
5.学生在毕业论文(议计)工作中应充分发挥主动性傌创造性,树立实事求是的科学作风,严格遵守规章制度,要独立完成毕业论文(设计)任务,严禁抄袭。
6.学生在毕业论文(设计)答辩结束后,应亠回毕业论文(设计)的所有材料,对设计内容中涉及的有关技术资料$学生负有保密责任,未经允许不得擅自对外交流或转让,并华助做好归档工作。
摘自《浙江财经学院本科毕上论文(设计)工作管理暂行规定》、论文(设计)选题的依据(选题的目的和意义、该选题国内外的研究现状及发展趋由于GPS导航定位的不稳定性,而地磁大小和方向随地点(甚至随时间)而异,无论何地磁场的水平分量永远指向磁北,这是所有电子罗盘的制作基础,所以电子罗盘可以用于稳定的精确的汽车导航定向,电子罗盘系统的市场需求也在我国日趋明显,而且也初具规模。
其主要发展趋势概括如下:(1)制定行业规范与产业标准(2)专业分工和产业化(3)与GPS技术结合,提高系统性能,实现定位一体化。
基于MSP430F149的电子罗盘设计陈学锋;张会永【摘要】文章提出了以三轴磁阻传感器HMC5883L和三轴加速度传感器ADXL345负责采集信号,16位超低功耗微控制器MSP430F149负责处理传感器采集的信号,进行相应的补偿然后输出显示航向的电子罗盘.【期刊名称】《科技创业月刊》【年(卷),期】2016(029)012【总页数】2页(P135-136)【关键词】HMC5883L;ADXL345;MSP430F149;电子罗盘【作者】陈学锋;张会永【作者单位】河南工学院河南新乡 453000;唐河中等职业学校河南南阳473400【正文语种】中文【中图分类】TP368.1电子罗盘是通过测量地球磁场水平方向分量进而推算出地磁北极方向从而得到电子罗盘载体前进方向的一种工具。
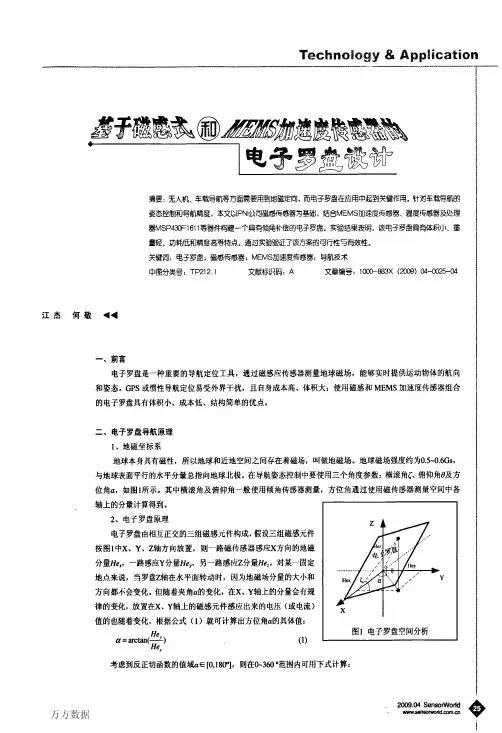
其中电子罗盘所在平面上与轴向方向(X方向)垂直的方向(Y方向)和电子罗盘在水平面上的投影的夹角称为翻滚角θ,电子罗盘的轴向方向(X方向)和它在水平面上的投影的夹角叫做俯仰角φ(见图1)。
测量电子罗盘的翻滚角和俯仰角能够经过三轴加速度传感器分别求出三个轴向上的重力加速度分量gX、gY、gZ进而计算出翻滚角和俯仰角。
翻滚角和俯仰角计算公式见式(1)、(2)。
已知电子罗盘的翻滚角θ和俯仰角φ,根据三轴磁阻传感器测得三个轴向上的地球磁场强度分量HX、HY、HZ,其中HX、HY两个分量在水平坐标系水平面上的投影分别为H*X、H*Y,水平磁场强度分量H*X、H*Y的计算公式见式(3)、(4)。
根据求出的水平磁场强度分量H*X、H*Y,可以计算出电子罗盘载体的地磁航向角。
地磁航向角指的是电子罗盘纵轴方向在水平面上的投影与地磁北极间的夹角,地磁航向角α计算公式见式(5)。
考虑到反正切函数的值域以及地磁航向角的范围,地磁航向角α在不同象限的取值分别为:当H*X<0时,α=180°-arctan当H*X>0,时,α=arctan当H*X>0,H*Y>0时,α=360°-arctan当H*X=0,H*Y>0,时,α=270°当H*X=0,H*Y<0,时,α=90°由于地磁北极和地理北极并不重合,他们之间有一个夹角,该夹角叫做磁偏角Y。

基于磁阻传感器与微处理器的二维磁电子罗盘的设计
李怡达;张中平;秦明;黄庆安
【期刊名称】《功能材料与器件学报》
【年(卷),期】2008(14)2
【摘要】介绍了磁电子罗盘的工作原理。
利用Honeywell的HMC1022双轴磁阻传感器设计了一种小型化的电子罗盘。
信号调理电路采用AD8656高精度放大器。
利用C8051F350微处理器完成A/D转换、方位角计算以及数字化输出等工作。
采用置位电路配合微处理器有效解决了传感器失调和漂移的影响。
对硬铁干扰和软铁干扰进行了分析,并给出了解决方法。
对数字罗盘实物进行了测试,最大误差小于1°。
【总页数】4页(P557-560)
【关键词】磁阻传感器;微处理器;二维磁电子罗盘
【作者】李怡达;张中平;秦明;黄庆安
【作者单位】东南大学MEMS教育部重点实验室
【正文语种】中文
【中图分类】V241.611
【相关文献】
1.基于磁阻传感器的车载型磁电子罗盘的设计 [J], 程波;徐威;何鹄;靳佰良
2.基于隧道磁阻传感器的三维电子罗盘设计∗ [J], 王琪;李孟委;王增跃;蒋孝勇;李锡广
3.基于磁阻传感器的二维电子罗盘设计 [J], 施利春;肖海梅
4.基于磁阻传感器和加速度计的电子罗盘设计 [J], 杨红红;程慧娟
5.基于HMC1022磁阻传感器的数字电子罗盘的设计与实现 [J], 王丽颖;支炜;孙红霞;张伟
因版权原因,仅展示原文概要,查看原文内容请购买。
基于STC单片机的电子罗盘-超声波测障系统设计周鹏【摘要】为了提高移动机器人的定位能力,提出一种基于STC89C52单片机的电子罗盘-超声波测障系统方案,并完成系统的软硬件设计.系统中,电子罗盘模块测试障碍物的方位(角度和方向),超声波模块测试与障碍物的距离,STC89C52单片机系统处理上述数据后在液晶显示器LCD1602上显示.实验表明,系统能精确测试障碍物的方位和距离,并实时显示,达到设计要求.【期刊名称】《电子设计工程》【年(卷),期】2013(021)010【总页数】4页(P163-166)【关键词】单片机;电子罗盘;超声波;测障【作者】周鹏【作者单位】华侨大学信息学院,福建厦门361021【正文语种】中文【中图分类】TP368超声波具有束射性好,方向性和抗干扰性强的特点使其被广泛应用于移动机器人的自动导航[1-2]。
但仅用超声波测障无法精确确定移动机器人的位置,因为它不能全面获知障碍物的方位(角度和方向),所以必须附加具有测试方位的传感器。
针对上述问题,提出一种基于STC89C52单片机的电子罗盘-超声波测障方案,实验表明,系统在定位精度和可靠性达到设计要求。
1 系统架构及工作原理系统主要由STC89C52单片机,超声波电路(超声波发射电路和接收电路),电子罗盘电路,LCD1602液晶显示电路和电源组成(如图1所示)。
图1 系统框图Fig.1 Structure diagram of MCU系统中,超声波电路用于测试与障碍物的距离。
其工作原理[3]是根据系统发射超声波和接收到反射波的时间差,结合修正后的波速计算出与障碍物距离。
测距公式如下:其中,S为与障碍物距离,单位m。
v为带温度补偿的超声波传播速度,单位m/s。
t为超声波发射与接收到反射波时的时间差,单位s。
331.5 为0℃时超声波在空气中的传播速度,单位m/s。
Δ为实测温度,由测温度电路测得,单位℃。
电子罗盘电路用于测试与障碍物的方位(角度和方向)。
本科毕业论文便携式电子罗盘软件设计与校准学生姓名:沈彤学号:20120214241学院:机电工程学院专业:机械设计制造及其自动化(机电一体化)指导教师:葛海浪 (助教)2016年 5 月 9 日目录引言 (4)第一章.电子罗盘的测量与倾角补偿原理 (5)1.1 电子罗盘的测量原理 (5)1.2 倾角补偿原理 (6)第二章电子罗盘的硬件设计与实现 (7)2.1 系统框架 (7)2.2 传感器的选择 (7)2.3. 单片机开发环境 (8)第三章.电子罗盘误差分析与补偿 (9)3.1 误差来源 (9)3.2 误差的补偿 (10)3.2.1 漂移补偿 (10)3.2.2 椭球化补偿 (10)第四章.校正及其程序设计 (12)4.1 8字型校准 (12)4.2 8字型校准的程序设计 (12)4.3 倾斜补偿的程序设计与实现 (13)4.4 滤波算法 (14)第五章.结论与展望 (15)致谢 (16)参考文献 (17)便携式电子罗盘软件设计与校准摘要本设计采用了STM32F103C8T6高速单片机为控制核心,连接了采用IIC总线通讯方式的磁阻传感器HMC5883L集成模块和加速度传感器MMA8452集成模块,通过磁阻传感器测量大地磁场,但是测量的数据仅仅在水平面内有效。
在倾斜时侧需要使用加速度计进行补偿。
在经过加速度传感器的姿态数据采集后使用单片机进行数据整理、运算,经过加速度计得到的X、Y、Z三轴姿态信息进行分别计算出俯仰角PITCH和横滚角ROLL。
磁阻传感器采集的大地磁场的X、Y、Z三轴数据经过单片机进行俯仰角和横滚角的倾斜度补偿。
在经过补偿之后,通过SPI连接的OLED显示屏输出磁阻传感器的大地磁场角度信息。
关键词:STM32单片机磁阻传感器加速度计电子罗盘The design and calibration of portable electronic compass systemAbstract This design adopts the stm32f103c8t6 high-speed microcontroller as control core, connecting the IIC bus communication hmc5883l magnetoresistive sensor integrated module and acceleration sensor MMA8452 integrated module, by magnetoresistive sensor to measure the magnetic field of the earth, but the measurement data only in the horizontal plane effectively. Accelerometer is used to compensate for the inclination of the side. In after acceleration sensor attitude data acquisition SCM data arrangement, calculation, after acceleration meter is obtained the X, y, Z three-axis attitude information are respectively to calculate the pitching angle of pitch and transverse roll angle, roll. The X, Y and Z three axis data of the magnetic field of the magnetic field of the magnetic field of the magnetic field of the magnetic resistance sensor are carried out by the single chip microcomputer to carry on the pitch angle and roll angle of the roll angle compensation. After compensation, the earth's magnetic field angle information of the OLED display is connected with the SPI display screen.Key words STM32 MCU ; magnetoresistive sensor ;acceleration sensor; electronic compass引言本课题所使用的电子罗盘属于磁罗盘,它是一种根据大地磁场各个方向的矢量的大小计算出方向的装置。
一种基于MSP430FR6989的磁阻传感水表超低功耗设计刘云鹏
【期刊名称】《数字技术与应用》
【年(卷),期】2016(000)003
【摘要】如何降低功耗、提高电源的可靠性以提高智能水表的使用寿命,是智能水表发展的一个重要议题。
本文使用MSP430FR6989超低功耗微控制器,采用休眠-中断唤醒的工作机制,利用其扩展扫描接口ESI,设计了一种超低功耗磁阻传感器水表,有效的降低了该智能水表的平均功耗,同时采用MBUS总线的通讯方式,通讯线复用为供电线,进一步提高电源的可靠性。
【总页数】2页(P185-186)
【作者】刘云鹏
【作者单位】广州市自来水公司广东广州510000
【正文语种】中文
【中图分类】TP274
【相关文献】
1.一种基于各向异性磁阻(AMR)技术的角位移传感器的原理及设计方案 [J], 罗炳海;王剑萍
2.一种基于MSP430FR6989的磁阻传感水表超低功耗设计 [J], 刘云鹏
3.一种超低功耗无线震动传感器设计 [J], 修威国;唐胜武;王政;咸婉婷;周胜
4.一种基于磁阻传感器的数字罗盘的设计 [J], 王永强;曾连荪;金志华
5.一种超低功耗高精度温度传感器芯片设计 [J], 赵宇佳;姜汉钧;张羊;王志华
因版权原因,仅展示原文概要,查看原文内容请购买。
基于磁电阻传感器的电子罗盘研制
白雪;姜庆;刘有彬;张志红;彭根斋
【期刊名称】《磁性材料及器件》
【年(卷),期】2022(53)3
【摘要】基于磁电阻传感器设计了一款电子罗盘,其硬件电路包括地磁信息及姿态信息采集电路、信号放大滤波电路、模数转换电路等;在电子罗盘硬件电路设计完成的基础上,基于MDK-ARM开发环境,进行软件部分设计。
其主要功能包括:控制AMR对磁电阻传感器和三轴加速度计的数据进行采集和处理;对数据进行补偿校准和方位角解算;将数据传输至上位机中进行显示和存储。
经实际测量,在倾角不大于30°时,方位角精度可达1°,实现了输出高精度方位角的目标。
【总页数】6页(P86-91)
【作者】白雪;姜庆;刘有彬;张志红;彭根斋
【作者单位】中国电子科技集团第九研究所;联合微电子中心有限责任公司
【正文语种】中文
【中图分类】TP212.1
【相关文献】
1.基于磁感式和MEMS加速度传感器的电子罗盘设计
2.基于电阻应变式传感器的电子天平的研制
3.基于MM212XMG磁传感器的电子罗盘设计
4.基于巨磁电阻的电子罗盘研制
5.基于磁阻传感器的带倾斜补偿的电子罗盘的研制
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MSP430的低功耗无线磁记号系统设计及应用
谢刚;李江博;孙庚寅
【期刊名称】《石油管材与仪器》
【年(卷),期】2015(001)002
【摘要】传统磁记号深度系统存在精度低、故障高等问题。
设计了一种基于MSP430的低功耗无线磁记号系统,通过软硬件的信号处理,实现测井深度的高精度无线测量。
实际应用及对比分析表明,该系统可以有效减少现场故障,极大提高精度、测井时效和深度测量设备的可靠性。
【总页数】4页(P14-17)
【作者】谢刚;李江博;孙庚寅
【作者单位】中国石油集团测井有限公司长庆事业部,陕西西安710201
【正文语种】中文
【中图分类】P631.81
【相关文献】
1.基于MSP430的低功耗无线磁记号系统设计及应用 [J], 谢刚;李江博;孙庚寅
2.基于MSP430低功耗温度无线网络监测系统的设计 [J], 时振伟
3.基于MSP430与HC06的低功耗无线温湿度检测系统 [J], 章腾辉
4.基于MSP430和LabVIEW的无线低功耗多通道温度测试系统设计与实现 [J], 李浩;郭左;陈传清
5.温室超低功耗无线传感器智控系统设计——基于MSP430和ZigBee [J], 魏纯;刘红艳
因版权原因,仅展示原文概要,查看原文内容请购买。
三维磁阻式电子罗盘的设计与实现
张玮;王冬青
【期刊名称】《工业控制计算机》
【年(卷),期】2014(027)003
【摘要】所设计的三维磁阻式电子罗盘的硬件方面是由三维磁阻传感器
HMC58831(深圳市凡高科技有限公司)、三维加速度传感器ADXL345B(深圳市创联发科技有限公司)以及微处理器MCU LPC1114FBD48(NXP公司)所组成,来测定系统的航向角、俯仰角和翻滚角.软件方面,通过对误差来源的分析,提出了椭圆拟合误差校正方法,来消除影响罗盘测量精度的误差,实现了高精度、运行稳定的三维电子罗盘.
【总页数】2页(P119-120)
【作者】张玮;王冬青
【作者单位】青岛大学自动化工程学院控制科学与工程,山东青岛266001;青岛大学自动化工程学院控制科学与工程,山东青岛266001
【正文语种】中文
【相关文献】
1.基于隧道磁阻传感器的三维电子罗盘设计∗ [J], 王琪;李孟委;王增跃;蒋孝勇;李锡广
2.一种磁阻式电子罗盘测试和标定方法研究 [J], 陈瑜;张铁民;彭孝东
3.三维磁阻式电子罗盘的研制 [J], 朱荣华;林新华;孔德义;梅涛
4.微型磁阻式电子罗盘的设计及罗差补偿方法的研究 [J], 崔瑞芬;常佶
5.基于HMC1022磁阻传感器的数字电子罗盘的设计与实现 [J], 王丽颖;支炜;孙红霞;张伟
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于MSP430单片机磁导航传感器的设计
杜林玉;卫蒙;马凯
【期刊名称】《新型工业化》
【年(卷),期】2018(008)008
【摘要】随着工业自动化的发展,AGV自动导引小车在仓储物流中的应用越来越广泛,磁带导航是目前应用比较广泛的导航方式,与其他导航方式相比其对环境的要求低、安装简单、容易维护、成本较低.本文介绍的AGV磁导航传感器采用的是线圈一维矩阵来检测外磁场的变化,目前,磁带导航传感器多采用并口或者串口232或485的输出方式,相比串口,并口的输出方式和数据传输更加稳定、高效,但要求AGV小车控制器提供更多的I/O口.本文介绍一种用两路信号表示AGV小车偏差的AGV磁导航传感器,通过设计合理的算法向AGV小车提供准确高效的偏差数据.经实验验证该设计是可行的.
【总页数】5页(P70-73,84)
【作者】杜林玉;卫蒙;马凯
【作者单位】西安石油大学电子工程学院,陕西西安 710065;西安石油大学电子工程学院,陕西西安 710065;西安石油大学电子工程学院,陕西西安 710065
【正文语种】中文
【中图分类】TJ410.2
【相关文献】
1.基于MSP430F149单片机与AM2301传感器的温湿度计设计 [J], 化腾飞
2.基于MSP430氦光泵磁敏传感器吸收比测试系统设计 [J], 何聪;周志坚;王君;连明昌
3.基于MSP430的仿生偏振光导航传感器的设计与实现 [J], 褚金奎;林林;陈文静;王寅龙
4.一种基于MSP430F112单片机的智能温度传感器设计 [J], 文汉云;莫晓明
5.一种基于MSP430单片机无位置传感器的非金属管道倾角度的检测及实现 [J], 王海军;李春鹏;吕海双;徐屹东;谢茹
因版权原因,仅展示原文概要,查看原文内容请购买。
第8卷 第1期信 息 与 电 子 工 程Vo1.8,No.12010年2月 INFORMATION AND ELECTRONIC ENGINEERING Feb.,2010 文章编号:1672-2892(2010)01-0012-04基于磁阻芯片和MSP430单片机的电子罗盘设计郭检柟(东南大学 IC 学院,江苏 南京 210096)摘 要:电子罗盘是一种获取载体姿态航向的设备。
介绍磁电子罗盘的工作原理及其具体实现,利用Honeywell 的HMC1022双轴磁阻传感器设计了一种小型化的电子罗盘,利用AD623高精密度放大器作信道调理电路,利用低功耗的MSP430微处理器完成A /D 转换、方位角计算以及数字化输出等工作。
采用置位/复位电路配合微处理器有效解决了传感器失调和漂移的影响。
实验表明该系统具有良好的获取航向能力,且运行稳定,功耗低,误差小于1°。
关键词:地磁场;电子罗盘;磁阻芯片;MSP430微处理器 中图分类号:TN911.72 文献标识码:ADesign of digital compass with magneto resistive chip and the MCU of MSP430GUO Jian -nan(School of IC,Southeast University,Nanjing Jiangsu 210096,China)Abstract:Digital compass is a kind of device which can acquire the carrier ’s attitude. This study introduced the principle of an electronic compass. By using magneto resistive sensor chip HMC1022 made by Honeywell,a 2-axis electronic compass was developed. The amplifier AD623 was used as the signal conditioning circuit. The MPU MSP430 was in charge of A/D converting, azimuth computing and digital outputting. And the Set/Reset(S/R) circuit was adopted so that the error due to null and drift could be minimized. Experiment results showed that the system had good ability to acquire the carrier ’s attitude with stable operation and low power consumption. The error was below 1°.Key words:geomagnetic field;digital compass;magneto resistive sensor chip;MSP4301 电子罗盘的测量原理地球的磁感应强度大约为50 μT~60 μT ,相当于沿着地球中心的一个磁棒,磁棒的两极相对于地理的两极有大约11.5°的夹角。
无论何地,地球磁场的水平分量永远指向磁北极。
这一原理是所有罗盘的制作基础。
所有罗盘都是测量地球磁场的北方向,其他方向即可推算出来。
地球磁场的北方向和实际的北方向有差别,而这种差别的大小在地球上的不同地点是不同的,所以必须知道罗盘所在的大致位置,才能计算出如何补偿地磁和真实北方向的差别,以显示出真实的北方向。
磁北的方向就是地磁场在水平面上分量的方向。
假设电子罗盘处于水平面上,要确定其相对于磁北的航向角α。
由磁阻传感器可以直接得出地磁场的水平分量H x ,H y ,因此相对于磁北的航向角为:arctanβ=xyH H (1) 正切函数的周期为180°,为保证数据有效性,船体航向角α转换到相对磁北0°~360°的范围内。
可将式(1)分解为式(2),由此可以得到相对于磁北极的360°范围内(顺时针方向)的航向角,加上当地的磁偏角就可以算出与真北的航向角。
2 电子罗盘系统硬件结构本设计使用Honeywell 生产的AMR 二轴磁阻传感器HMC1022作为磁场测量元件,通过置位/复位(S/R)电路收稿日期:2009-09-10;修回日期:2009-11-20第1期郭检柟:基于磁阻芯片和MSP430单片机的电子罗盘设计 1300,01800,0arctan 180900arctan 1802700α°=>⎧⎪°=<⎪⎪⎪×°⎪=⎨°+<⎪π⎪⎪×°⎪°+>⎪π⎩y x y x x yy x y y H H H H H H H H H H (2)消除强磁场对磁阻传感器灵敏度的影响。
磁阻传感器的输出经过精密运算放大器AD623放大后,再由高性能单片机MSP430F449对数据进行模/数转换、角度运算,得到载体的航向角。
最后方向角数据通过串口传送给用户终端,从而构成一个完整的系统。
系统原理框图见图1。
图 1 系统原理框图2.1 磁阻传感器HMC1022测量范围为±600 μT(地磁场通常为50 μT~60 μT ,在其测量范围之内),可单电源工作,输出信号为弱电压值,在桥压为5 V 时,灵敏度和分辨力分别为0.01 mV/V/μT 和0.85 μT [1]。
磁阻传感器HMC1022内部集成了2个惠斯通电桥,这2个电桥相互垂直,分别对应直角坐标系中的x 轴和y 轴,输出毫伏级电压V x 和V y [2]。
2.2 置位复位电路当磁阻传感器暴露于干扰磁场中时,传感器元件会分成若干方向随机的磁区域,从而导致灵敏度衰减,见图2。
环境中的强磁场会导致磁传感器输出信号变异,为了消除这种影响并使输出信号达到最佳,就需要应用磁开关技术(SR+/SR–)来抵消剩余磁场,HMC1022通过集成在芯片内部的置位/复位合金带对薄膜施加2 A~4 A,20 ns~ 50 ns 的脉冲电流就可以重新将磁区域对准,统一到一个方向上,这样可确保高灵敏度。
本系统采用置位/复位电路见图3,出于硬件电路实现的方便性和体积的考虑,S/R 电路引入了+5 V 电源和钽电容,利用手动触发开关连通电源与磁阻传感器的复位引脚,产生复位脉冲。
经实际应用证明,这样设计的电路简洁有效。
2.3 信道调理电路磁阻传感器HMC1022输出的是差分信号,输出的有效值是OUT+和OUT–之间的差值,为毫伏级。
为了有效利用A/D 的采样精密度,在进行采样前,需预先把传感器输出的信号进行放大。
电路中选用低噪声、低功耗output by serialR 17 10 k ΩR 18 1 M ΩC 14 100 μFS/R+S/R-GND+5 VS 3Fig.3 Circuit of S/R 图3 置位/复位电路1021/1022 V b =5 V-20 -15 -10 -5 0 5 10 15 20B /104TrescanFig.2 Sensor output vs. magnetic fieldwhen the bridge supply is 5 V2 5 V 电桥电压下输出与磁场强度曲线Fig.4 Circuit of signal conditioning图4 信道调理电路GND54 R 6 200 Ω +5 V12 876C 7 10 μFOUT(A)-U 3C 6 0.1 μF OUT(A)+V out1 AD623+1.8 V3GND14信 息 与 电 子 工 程 第8卷的AD623运算放大器,其电路原理见图4。
G =100/R G ,G 为放大倍数,R G 的单位为k Ω。
因此G =500,基准电压为1.8 V 。
2.4 微处理器本系统采用TI 公司的16位RISC 结构超低功耗单片机MSP430F449作为微控制器,其最突出的优点是低电源电压、超低功耗。
MSP430系列单片机的电源电压为1.8 V~3.6 V 。
在工作频率为1 MHz 的激活模式下,其功耗小于400 μA ;在等待方式下,耗电为1.1 μA ,在节电方式下,最低可达0.1 μA ,I/O 输入端口的漏电流最大仅为50 nA ,并且从待机模式到唤醒的响应时间不超过6 μs 。
超低的电流要求和快速唤醒时间,可使用户设计出一个低功耗的系统。
另外,MSP430F449还集成了一些常用的外围模块和存储器,比如ADC12,RAM,看门狗定时器等。
因此,MSP430适合应用于使用电池供电的仪器、仪表类产品中。
此外,MSP430系列单片机所使用的一套应用C 语言的集成开发环境和调试器是由IAR 公司提供的WORKBENCH 和C–SPY ,可直接下载程序至片内FLASH 内存,脱机运行。
大大缩短开发周期,降低开发难度[3]。
本设计应用MSP430F449自带的12位A/D 转换端口以及串行通信模块(UART 异步模式)输出数据,简化了电路设计。
ADC12内核使用2个可编程的参考电压(V R+和V R –)定义转换的最大/最小值。
本设计通过寄存器选取模拟电源的正端和负端作为参考电压。
同时在串行通信模块中使用max3232代替了常见的max232作为串口通信芯片,使系统功耗降低。
3 系统软件设计系统软件除了完成初始化、A/D 转换、数据采集、方向角计算和数字量输出外,还要对由于传感器失调、温度漂移以及硬铁和软铁干扰造成的误差进行补偿。
失调和温度漂移会在传感器敏感信号上面叠加一个直流偏置,软件通过将传感器在置位和复位情况下得到的信号求平均值,即可得到由于失调和漂移造成的直流偏置信号,在方向角计算前对该偏置信号进行补偿即可消除其影响。
为了补偿铁质材料的干扰,即硬铁和软铁干扰,可以根据椭圆假设法[4−5]进行补偿,确定2个定标因数X sf和Y sf ,将输出电压由椭圆改为圆。
并计算偏移值X off 和Y off ,将圆心定位在零点。
用来计算航向角的H x ,H y 值为:H x =X sf X+X off 和H y =Y sf X+Y off ,其中X 和Y 为x 轴和y 轴的实际磁场强度。
软件流程见图5。
图5 软件流程图4 测试结果和结论在实验中,将电子罗盘固定在水平面上,每隔15°测1个读数,得到图6,即双轴磁电子罗盘在水平条件下x 轴和y 轴2个正交传感器单元的经过放大后的输出信号。