两相步进电机驱动器设计
- 格式:doc
- 大小:250.81 KB
- 文档页数:20
收稿日期:2008-10 作者简介:安立宇(1979—),男,硕士研究生,研究方向为嵌入式系统设计。
基于FPG A 的两相步进电机细分驱动器设计安立宇1,赵曙光2,杜 丘1(1.东华大学信息科学与技术学院,上海201620;2.东华大学数学化纺织服装技术教育部工程研究中心,上海201620) 摘要:采用步进电机驱动的机构中,为了提高定位精度,文章提出了一种高性能的步进电机细分控制系统设计,该系统由FPG A 和专用集成电路I X MS 150PSI 构成,在FPG A 中嵌入Cos/Sin 表,通过查表控制步进电机两项绕组电流,实现了高精度的步进电机细分控制系统,提高了步进电机的运行精度,消除了低速震荡现象,该系统可用于机器人,打印机和光学平台等精密位置控制系统。
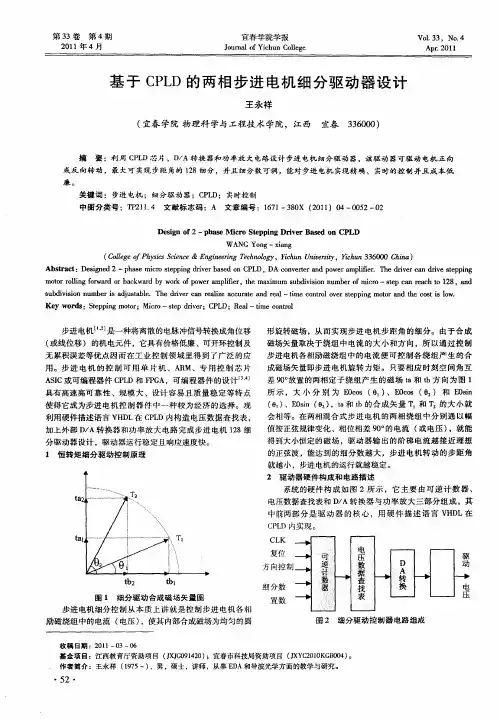
关键词:步进电机;细分;FPG A中图分类号:T M930 文献标识码:B 文章编号:1006-2394(2009)01-0030-03D esi gn of Two 2pha se M i crostepp i n g D r i ver Ba sed on FPGAAN L i 2yu 1,ZHAO Shu 2guang 2,DU Q iu1(1.College of I nf or mati on Science and Technol ogy,Donghua University,Shanghai 201620,China;2.D igital Textile and Gar ment Technol ogy Engineering Research Center f or the M inistry of Educati on,Shanghai 201620,China )Abstract:A high perf or mance syste m f or stepper mot or contr ol in a m icr ostepp ing mode is p resented,which was designed and perf or med with FPG A and high 2perfor med dedicated integrated circuits I X MS 150PSI .By app lying cos/sin l ook 2up table in FPG A,the m icr ostepp ing contr ol syste m can be achieved,which i m p r oves the positi oning accuracy and eli m inates l ow s peed ri pp le and res onance effects in a stepper mot or electrical drive .The sa me m icr ostepp ing syste m is ideal f or r obotics,p rinters,X -Y tables and can facilitate the constructi on of very s ophisticated positi oning contr ol syste m.Key words:stepper mot or;m icr ostep;FPG A1 细分驱动原理细分驱动可以保留步进电机开环控制的优点,减小步进电机步距角,消除步进电机低频振荡。
两相混合式步进电机H桥驱动电路设计原理H桥功率驱动电路可应用于步进电机、交流电机及直流电机等的驱动。
永磁步进电机或混合式步进电机的励磁绕组都必须用双极性电源供电,也就是说绕组有时需正向电流,有时需反向电流,这样绕组电源需用H桥驱动。
本文以两相混合式步进电机驱动器为例来设计H桥驱动电路。
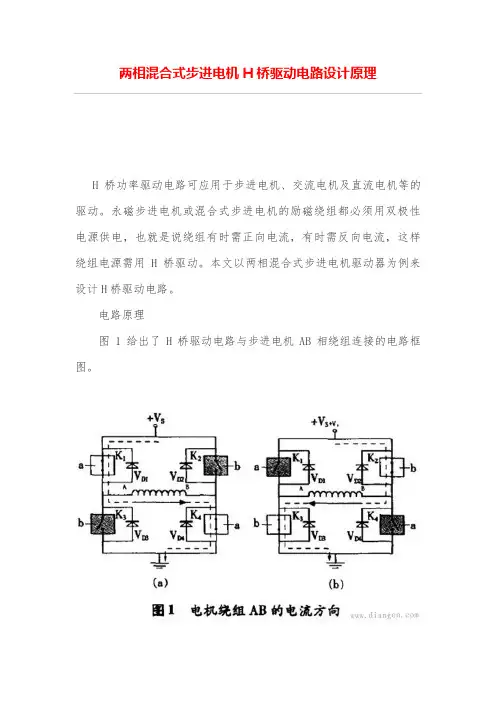
电路原理图1给出了H桥驱动电路与步进电机AB相绕组连接的电路框图。
4个开关K1和K4,K2和K3分别受控制信号a,b的控制,当控制信号使开关K1,K4合上,K2,K3断开时,电流在线圈中的流向如图1(a),当控制信号使开关K2,K3合上,K1,K4断开时,电流在线圈中的流向如图1(b)所示。
4个二极管VD1,VD2,VD3,VD4为续流二极管,它们所起的作用是:以图1(a)为例,当K1,K4开关受控制由闭合转向断开时,由于此时线圈绕组AB上的电流不能突变,仍需按原电流方向流动(即A→B),此时由VD3,VD2来提供回路。
因此,电流在K1,K4关断的瞬间由地→VD3→线圈绕组AB→VD2→电源+Vs形成续流回路。
同理,在图1(b)中,当开关K2,K3关断的瞬间,由二极管VD4,VD1提供线圈绕组的续流,电流回路为地→VD4→线圈绕组BA→VD1→电源+Vs。
步进电机驱动器中,实现上述开关功能的元件在实际电路中常采用功率MOSFET管。
由步进电机H桥驱动电路原理可知,电流在绕组中流动是两个完全相反的方向。
推动级的信号逻辑应使对角线晶体管不能同时导通,以免造成高低压管的直通。
另外,步进电机的绕组是感性负载,在通电时,随着电机运行频率的升高,而过渡的时间常不变,使得绕组电流还没来得及达到稳态值又被切断,平均电流变小,输出力矩下降,当驱动频率高到一定的时候将产生堵转或失步现象。
因此,步进电机的驱动除了电机的设计尽量地减少绕组电感量外,还要对驱动电源采取措施,也就是提高导通相电流的前后沿陡度以提高电机运行的性能。
步进电机的缺陷是高频出力不足,低频振荡,步进电机的性能除电机自身固有的性能外,驱动器的驱动电源也直接影响电机的特性。
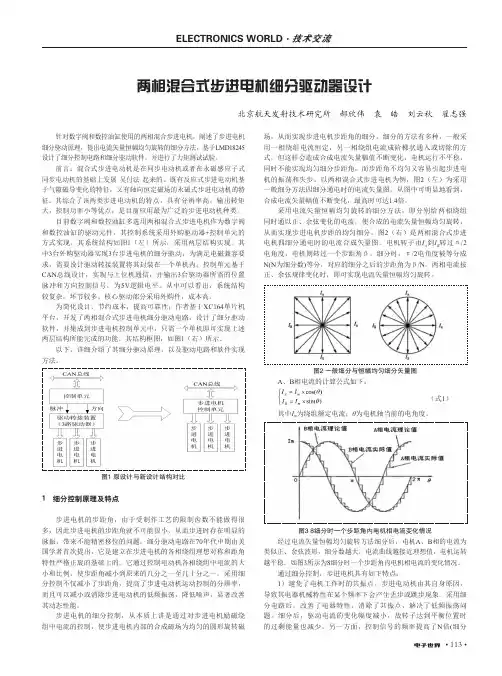
• 113•两相混合式步进电机细分驱动器设计北京航天发射技术研究所 郝欣伟 袁 皓 刘云秋 翟志强针对数字阀和数控油缸使用的两相混合步进电机,阐述了步进电机细分驱动原理,提出电流矢量恒幅均匀旋转的细分方法,基于LMD18245设计了细分控制电路和细分驱动软件,并进行了力矩测试试验。
前言:混合式步进电动机是在同步电动机或者在永磁感应子式同步电动机的基础上发展 吴付法 起来的。
既有反应式步进电动机基于气隙磁导变化的特征,又有轴向恒定磁场的永磁式步进电动机的特征。
其综合了该两类步进电动机的特点,具有分辨率高,输出转矩大,控制功率小等优点,是目前应用最为广泛的步进电动机种类。
目前数字阀和数控油缸多选用两相混合式步进电机作为数字阀和数控油缸的驱动元件,其控制系统采用外购驱动器+控制单元的方式实现。
其系统结构如图1(左)所示,采用两层结构实现。
其中3台外购驱动器实现3台步进电机的细分驱动,为满足电磁兼容要求,需要设计驱动转接装置将其封装在一个单机内;控制单元基于CAN 总线设计,实现与上位机通信,并输出3台驱动器所需的位置脉冲和方向控制信号,为5V 逻辑电平。
从中可以看出,系统结构较复杂,环节较多,核心驱动部分采用外购件,成本高。
为简化设计,节约成本,提高可靠性,作者基于XC164单片机平台,开发了两相混合式步进电机细分驱动电路,设计了细分驱动软件,并集成到步进电机控制单元中,只需一个单机即可实现上述两层结构所能完成的功能。
其结构框图,如图1(右)所示。
以下,详细介绍了其细分驱动原理,以及驱动电路和软件实现方法。
图1 原设计与新设计结构对比1 细分控制原理及特点步进电机的步距角,由于受制作工艺的限制齿数不能做得很多,因此步进电机的步距角就不可能很小,从而步进时存在明显的脉振,带来不能精密移位的问题。
细分驱动电路在70年代中期由美国学者首次提出,它是建立在步进电机的各相绕组理想对称和距角特性严格正旋的基础上的。
两相步进电机控制系统设计.综合课程设计题目两相步进电机学院计信学院专业10自动化班级2班学生姓名指导教师文远熔2012 年12 月28 日两相步进电机课程设计报告步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。
控制系统通过单片机存储器、I/O 接口、中断、键盘、LED 显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。
为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。
人们用它来驱动时钟和其他采用指针的仪器,打印机、绘图仪,磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等机械装置。
此外作为执行元件,步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中,随着微电子和计算机技术的发展,它的需要量与日俱增,在各个国民经济领域都有应用。
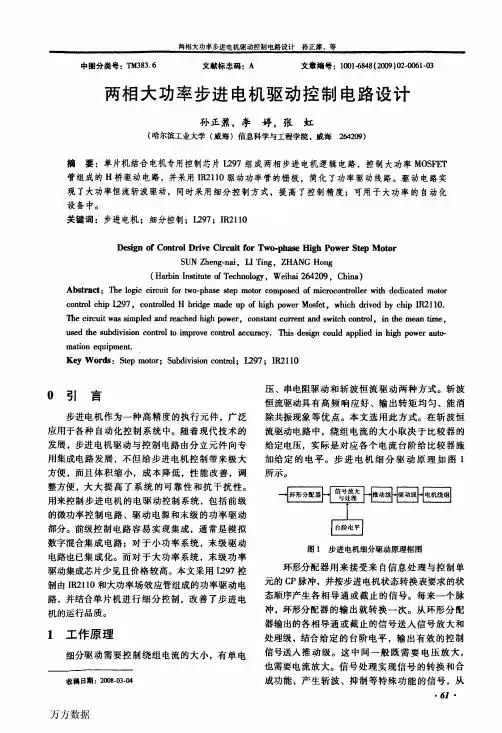
步进电机是机电数字控制系统中常用的执行元件,由于其精度高、体积小、控制方便灵活,因此在智能仪表和位置控制中得到了广泛的应用,大规模集成电路的发展以及单片机技术的迅速普及,为设计功能强,价格低的步进电机控制驱动器提供了先进的技术和充足的资源。
关键字: 步进电机单片机1 设计内容根据给定的任务要求选择合适的单片机和其他电子元件,进行系统硬件电路设计和软件编程,根据系统制作并调试电路板,使之实现任务要求。
两相步进电机,步距角为3度,编程实现下列功能:(1)按键,步进电机按一定速度正转。
基于TMC262的两相步进电机驱动控制器设计Design of Two-phase Stepper Motor DriveController Based on TMC262何正伟翁%信作者(长江大学电子信息学院,湖北荆州434023)[摘要]步进电机作为一种感应式直流电机,具有操作简单,功率低等特D,被广泛应用在工业生产中。
本文设计了一款基于TMC262的两相步进电机驱动控制器,集成了RS-485现场总线,采用Modbus-RTU通信协议与上位机通信。
[关键词]STM32;TMC262;细分控制技术[中图分类号]TM932[文献标识码]B引言步进电机是将电脉冲信号,变为角位移或线位移的控制电机⑴,在非过载的情况下,电机的步距角和转速大小不受电压波动和负载变化的影响,也不受环境条件如温度、气压、冲击、振动等的影响,只与脉冲频率有关。
步进电机通常采用开环控制。
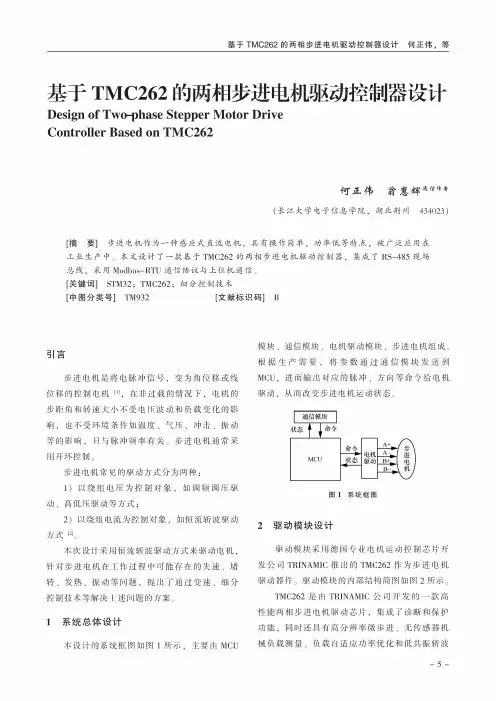
步进电机常见的驱动方式分为两种:1)以绕组电压为控制对象,如调频调压驱动、高低压驱动等方式;2)以绕组电流为控制对象,如恒流斩波驱动方式[2]$本次设计采用恒流斩波驱动方式来驱动电机,针对步进电机在工作过程中可能存在的失速、堵转、发热、振动等问题,提出了通过变速、细分控制技术等解决上述问题的方案$1系统总体设计本设计的系统框图如图1所示,主要由MCU 模块、通信模块、电机驱动模块、步进电机组成$根据生产需要,将参数通过通信模块发送到MCU,进而输出对应的脉冲、方向等命令给电机驱动,从而改变步进电机运动状态$图1系统框图2驱动模块设计驱动模块采用德国专业电机运动控制芯片开发公司TRINAMIC推出的TMC262作为步进电机驱动器件$驱动模块的内部结构简图如图2所示$ TMC262是由TRINAMIC公司开发的一款高性能两相步进电机驱动芯片,集成了诊断和保护功能,同时还具有高分辨率微步进、无传感器机负载、负载率化和低振斩波DIR1NCool s tep 2xADCGate"DriverHSc-BM □—E+严+Vm QSTEP.VCC 10TMC262MCUCSN SCK .SPI control, Config & DiagsProtaction& DiagnosticsChopperV2 x Current ComparatorSine Table 4*256entry■ A stallGuard SG_TST图2驱动模块结构图操作。
【关键字】设计毕业论文(设计)2010届电气工程及其自动化专业班级题目两相混合式步进电动机驱动控制系统设计姓名学号指导教师职称二О一二年五月二十五日摘要本文源于解决步进电动机的失步问题。
论文在了解步进电动机的特点及工作原理的基础上,重点研究两相步进电动机的单片机控制技术。
根据两相混合式步进电动机的驱动控制特点,本文采用了双极性驱动方式,通过脉冲分配合理控制绕组中的电流保证步进电动机内部合成磁场的幅值恒定,合成磁场的角度均匀,并在此基础上设计了一种两相混合式步进电动机驱动器。
该驱动器以单片机8098为控制核心,选用PBL3717、H桥驱动器件等构成驱动电路,论文从驱动技术方案、硬件电路、控制软件设计方面进行了详细地描述。
在反馈检测电路设计时,采用光电编码器来进行步进电动机的转速。
通过8279扩展键盘显示电路来显示电动机的转速和给定速度;另外利用ISD1420语音芯片实现语音报速功能。
最后对所设计的两相混合式步进电动机驱动器进行了性能测试分析,结果表明:该驱动器达到了系统设计前所提出的各项指标。
系统运行安全、可靠、稳定。
整个系统电路简单实用、性能优良、通用性强。
设计原则适用于各种步进电动机,有一定的实用价值。
关键词:2相混合式步进电动机,非线性动态模型,单片机,细分控制AbstractThis dissertation is about a fundamental research that solve the problem of desynchronizing, Based on the characteristics and the work principle of stepping motor, the paper emphasizes the control technology of stepping motor which controlled by the 8098 SCM.According to the character, the paper uses dual bridge driving control technology. Through analyzing and establishing the subdivision model, this paper controls the winding current reasonably, and guarantees constant magnetic field value, even angle.A new driver for 2-phase stepping motor is designed.The driver takes single chip 8098 as the control core, selects BPL3717 and H-bridge as the driver circuit. The paper discusses the technology of driver, the hardware and software designing in detail .In order to design the feedback of the current and speed of 2-phase hybrid stepping motor, using speed monitor to detect the speed of stepping motor. At the same time, using key- board to input the speed and output by LED, which is taken by chip 8279.In the other way, we use pronunciation chip ISD1420 to report the current steep.At last, a whole test for driver is made. The experiment result indicates that this driver reaches the qualities required. The system runs smoothly and safety. The circuit is simple, and has a good performance. The design principle fits many kinds of stepping motor, and has a good practical value.Key Words: 2-phase hybrid stepping motor, Nonlinear dynamic model Single chip,Subdivision control目录绪论 (1)1.1课题研究背景及主要内容............... 错误!未定义书签。
第3期高嵩:高性能两相步进电机驱动器设计APOS<=‘1’:ANEG<=‘0’.IBPOS<=‘0’:BNEG<=‘1’:elsif(countl<(2木count))thenAPOS<=‘1’:ANEG<=‘0’:BPOS<=‘1’:BNEG<=‘0’:elsif(countl<(3count))thenAPOS<=‘0’:ANEG<=‘1’:BPOS<=‘1’:BNEG<=‘0’:elseAPOS<=‘0’:ANEG<=‘1’:BPOS<=‘0’:BNEG<=‘1’:endif;elsif(DIR—IN=‘0’)then一反转endif;endif;endprocess;其16细分仿真结果如图4所示。
图4仿真结果图3结束语本步进电机驱动器电路应用斩波恒流细分驱动方式,设计合理且性能优良。
使用EPLD器件提高了灵活性和实时性;同时运用驱动集成电路IR2304,电路简单可靠,驱动能力强,大大减小电路体积并减少电源品种;充分利用了电流控制器L6506的特性,使得电流控制响应快、精度高,电机运行平稳。
以EPLD为控制核心的两相步进电机驱动器已通过性能测试,能够满足使用要求。
参考文献:[1]刘宝廷程树康,等.步进电动机及其驱动控制系统[M].黑龙江:哈尔滨工业大学出版社,1997[2]叶树明,李项立.PWM细分恒流步进电机驱动电路的设计[J].机电工程,2004,21(12):20[3]王晓明.电动机的单片机控制[M].北京:航空航天大学出版社,2002[4]潘琢金,施国君.C8051F×××高速SOC单片机原理及应用[M].北京:航空航天大学出版社,2002[5]佘艳,孙云莲.半桥驱动集成电路IR2304[J].电子世界,2005(1)[6]林明权,等编著.VHDL数字控制系统设计范例[M].北京:电子工业出版社,2003作者简介:高嵩(1972一),男,江苏南京人,高级工程师,工学硕士,主要从事地面雷达伺服系统及相关器件设计与研究工作。
文章编号:1001-2265(2007)01-0076-02收稿日期:2006-07-11作者简介:黄健(1979—),男,合肥人,合肥工业大学硕士研究生,(E -mail )fly1379@ 。
基于双极性桥式电路的两相制步进电机驱动器设计黄健,尹志强,王玉琳(合肥工业大学机械与汽车工程学院,合肥 230009)摘要:文章提出了一种结构简单的用于两相制步进电机的控制驱动器的设计。
该控制驱动器由L297步进电机控制芯片与功率驱动电路组成。
L297芯片产生脉宽可调的脉冲相序信号,该信号作为双极性桥式功率驱动电路的输入信号,放大后驱动步进电机。
文中介绍了L297芯片与双极性桥式电路的设计原理。
该步进电机驱动器在微机数控机床中已成功应用。
关键词:L297步进电机微控制器;脉冲宽度调制;信号状态;双极性H 桥电路中图分类号:T M383.4 文献标识码:AThe D esi gn of Quarter 2pha se Stepper M otor D r i ver Ba sed on D ua l Br i dge D r i v i n g C i rcu itHUANG J ian,YI N Zhi 2qiang,WANG Yu 2lin(School of Mechanical &Aut omotive Engineering,Hefei University of Technol ogy,Hefei 230009,China )Abstract:This article intr oduces a contr ol 2driver used for quarter 2phase stepper mot or .The driver consists of the L297stepper mot or contr ol chi p and the power 2driven circuit .L297chi p generates pulse phase sequence signals of which the pulse width is adjustable .The signals are the input ones of dual bridge driving circuit and drive the stepper mot or after a mp lificati on .I n this article,the design p rinci p le of L297chi p and dual bridgedriving circuit is stated .The driver is used for NC machine t ool successfully .Key words:L297step mot or contr oller;pulse width modulati on;signal state;dual bridge driving circuit0 引言步进电机是一种将电脉冲信号转换成直线或角位移的电机,在机电控制中得到了广泛的应用。
两相步进电机驱动器设计目录第1章绪论 (3)1.1 引言 (3)1.2 步进电机常见的控制方法与驱动技术简介 (3)第2章设计方案 (5)2.1 步进电机的介绍 (5)2.2 步进电机的特点 (6)2.3 步进电机的分类 (6)2.4步进电机运动特性及性能参数 (7)2.5 设计方案的确定 (8)2.6 设计思想与设计原理 (9)第3章单元电路的设计 (9)3.1方波产生电路设计 (9)3.2 信号的分配 (13)3.3功率放大电路设计 (15)3.4 总体设计 (16)第4章设计方案的论证 (18)第5章心得体会 (18)第6章参考文献 (19)第1章1.1 引言步进电动机一般以开环运行方式工作在伺服运动系统中,它以脉冲信号进行控制,将脉冲电信号变换为相应的角位移或线位移。
步进电动机可以实现信号的变换,是自动控制系统和数字控制系统中广泛应用的执行元件。
由于其控制系统结构简单,控制容易并且无累积误差,因而在20世纪70 年代盛行一时。
80 年代之后,随着高性能永磁材料的发展、计算机技术以及电力电子技术的发展,矢量控制技术等一些先进的控制方法得以实现,使得永磁同步电机性能有了质的飞跃,在高性能的伺服系统中逐渐处于统治地位。
相应的,步进电机的缺点越来越明显,比如,其定位精度有限、低频运行时振荡、存在失步等,因而只能运用在对速度和精度要求不高,且对成本敏感的领域。
技术进步给步进电动机带来挑战的同时,也带来了新的发展遇。
由于电力电子技术及计算机技术的进步,步进电动机的细分驱动得以实现。
细分驱动技术是70 年代中期发展起来的一种可以显著改善步进电机综合性能的驱动控制技术。
实践证明,步进电机脉冲细分驱动技术可以减小步进电动机的步距角,提高电机运行的平稳性,增加控制的灵活性等。
由于电机制造技术的发展,德国百格拉公司于1973 年发明了五相混合式步进电动机,又于1993 年开发了三相混合式步进电动机。
根据混合式步进电动机的结构特点,可以将交流伺服控制方法引入到混合式步进电机控制系统中,使其可以以任意步距角运行,并且可以显著削弱步进电机的一些缺点。
若引入位置反馈,则混合式步进电机控题正是借鉴了永磁交流伺服系统的控制方法,研制了基于DSP的三相混合式步进电机驱动器.1.2 步进电机常见的控制方法与驱动技术简介1.2.1常见的步进电机控制方案1、基于电子电路的控制步进电机受电脉冲信号控制,电脉冲信号的产生、分配、放大全靠电子元器件的动作来实现。
由于脉冲控制信号的驱动能力一般都很弱,因此必须有功率放大驱动电路。
步进电机与控制电路、功率放大驱动电路组成一体,构成步进电机驱动系统。
此种控制电路设计简单,功能强大,可实现一般步进电机的细分任务。
这个系统由三部分组成:脉冲信号产生电路、脉冲信号分配电路、功率放大驱动电路。
系统组成如图1.1所示。
脉冲控制器功率放大驱动电路环形分配器步进电机图1.1 基于电子电路控制系统此种方案即可为开环控制,也可闭环控制。
开环时,其平稳性好,成本低,设计简单,但未能实现高精度细分。
采用闭环控制,即能实现高精度细分,实现无级调速。
闭环控制是不断直接或间接地检测转子的位置和速度,然后通过反馈和适当的处理,自动给出脉冲链,使步进电机每一步响应控制信号的命令,从而只要控制策略正确电机不可能轻易失步[4]。
该方案多通过一些大规模集成电路来控制其脉冲输出频率和脉冲输出数,功能相对较单一,如需改变控制方案,必须需重新设计,因此灵活性不高。
2、基于PLC的控制PLC也叫可编程控制器,是一种工业上用的计算机。
PLC作为新一代的工业控制器,由于具有通用性好、实用性强、硬件配套齐全、编程简单易学和可靠性高等优点而广泛应用于各行业的自动控制系统中。
步进电机控制系统有PLC、环形分配器和功率驱动电路组成。
控制系统采用PLC来产生控制脉冲。
通过PLC 编程输出一定数量的方波脉冲,控制步进电机的转角进而控制伺服机构的进给量,同时通过编程控制脉冲频率来控制步进电机的转动速度,进而控制伺服机构的进给速度。
环形脉冲分配器将PLC输出的控制脉冲按步进电机的通电顺序分配到相应的绕组。
PLC控制的步进电机可以采用软件环形分配器,也可采用硬件环形分配器。
采用软件环形分配器占用PLC资源较多,特别是步进电机绕组相数大于4时,对于大型生产线应该予以考虑。
采用硬件环形分配器,虽然硬件结构稍微复杂些,但可以节省PLC资源,目前市场有多种专用芯片可以选用。
步进电机功率驱动电路将PLC输出的控制脉冲放大,达到比较大的驱动能力,来驱动步进电机。
采用软件来产生控制步进电机的环型脉冲信号,并用PLC中的定时器来产生速度脉冲信号,这样就可以省掉专用的步进电机驱动器,降低硬件成本。
但由于PLC的扫描周期一般为但由于PLC的扫描周期一般为几毫秒到几十毫秒,相应的频率只能达到几百赫兹,因此,受到PLC工作方式的限制及其扫描周期的影响,步进电机不能在高频下工作,无法实现高速控制。
并且在速度较高时,由于受到扫描周期的影响,相应的控制精度就降低了。
3、基于单片机的控制采用单片机来控制步进电机,实现了软件与硬件相结合的控制方法。
用软件代替环形分配器,达到了对步进电机的最佳控制。
系统中采用单片机接口线直接去控制步进电机各相驱动线路。
由于单片机的强大功能,还可设计大量的外围电路,键盘作为一个外部中断源,设置了步进电机正转、反转、档次、停止等功能,采用中断和查询相结合的方法来调用中断服务程序,完成对步进电机的最佳控制,显示器及时显示正转、反转速度等状态。
环形分配器其功能由单片机系统实现,采用软件编程的办法实现脉冲的分配。
第2章2.1 步进电机介绍步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
2.2.步进电机特点(1)旋转角度与输入脉冲成比例,角度误差小,不会产生积累误差。
(2)利用输入脉冲频率高低可做转速调整。
(3)由于精度高,可采用开环控制,避免使用复杂的反馈控制电路,成本低。
(4)电动机的动态反应快,起动、停止、加速、减速、正反转反应快,容易控制。
(5)可以直接带负载低速运行,不必接减速器。
(6)结构简单,可靠性高,使用寿命长。
(7)在低速和共振区时可能产生振动和噪声,细分步距角可减轻震荡。
(8)有可能产生失步现象。
步进电动机有一个起动频率,电动机起动时,如果输入脉冲过高,电动机来不及获得足够能量,转子跟不上旋转磁场速度,会引起失步。
提高电动机转矩,减小步距角,减小负载转动惯量都将可以提高电动机起动频率。
制动和突然转向时,转子获得过多能量,产生严重过冲,引起失步。
过快加速或减速时,也可能引起失步。
2.3.步进电机分类(1)可变磁阻式(VR型)步进电机该类电动机由定子绕组产生的反应电磁力吸引用软磁钢制成的齿型转子进行步进驱动,故又称作反应式步进电动机,其定子与转子分别由铁心构成。
定子上嵌有线圈,转子朝定子间磁阻最小方向转动,并由此而得名为可变磁阻型。
(2)永磁式(PM型)步进电机PM型进电动机的转子采用永久磁铁,定子采用软磁钢制成,绕组轮流通电,建立的磁场与永久磁铁的恒定磁场相互吸引与排斥产生转矩。
这种电动机由于采用了永久磁铁,即使定子绕组断电也能保持一定转矩,故具有记忆能力,可用作定位驱动。
(3)混合式(HB型)步进电机这种电动机转子上嵌有永久磁铁,故可以说是PM型步进电动机,但从定子和转子的导磁体来看,又和VR型相似,所以是PM型和VR型相结合的一种形式,故称为混合性步进电动机。
他不仅具有VR型步进电动机步距角小、响应频率高的优点,而且还具有PM型步进电动机励磁功率小、效率高的优点。
2.4.步进电机运动特性及性能参数(1)分辨力在一个电脉冲作用下,步进电动机转子转过的角位移即步距角α。
(2)矩-角特性图2.1 矩-角特性(3)启动频率步进电动机能够不失步起动的最高脉冲频率成为起动频率。
所谓失步是转子前进的步数不等于输入的脉冲数,包括丢步和越步两种情况。
(4)最高工作频率步进电动机起动后,将脉冲频率逐步升高,在额定负载下,电动机能不失步正常运行的极限频率为最高工作频率。
(5)转矩-工作频率特性步进电动机转动后,其输出转矩随工作频率增高而下降,当输出转矩下降到一定程度是,步进电动机就不能正常工作。
图2.2 转矩-工作频率特性J1>J2>J32.5 设计方案的确定→→图2.3 步进电机驱动器整体框图2.6设计思想与设计原理它由方波产生电路,脉冲环形分配电路和功率放大电路三大主要电路组成。
方波产生电路主要为脉冲环形分配电路提供方波脉冲信号,使得驱动信号发生电路输出四相驱动信号,经过功率放大电路,为电机提供足够的电流,从而控制电机的运转。
第3章在本次设计中,要进行以下几个单元电路的设计:第一,方波产生电路;第二,环形计数电路;第三,功率放大电路。
以下的篇幅将对上述电路分别进行设计及原理阐述。
3.1方波产生电路设计方波产生电路的功能很简单,就是为后续电路提供方波脉冲。
结合数电教材上的理论知识,很容易想到用555定时器来构成方波产生器。
555定时器内部结构的简化原理图和引脚图如图2所示。
它由3个阻值为5千欧的电阻组成的分压器、两个电压比较器C1和C2、基本RS触发器、放电BJT T以及缓冲器G组成。
图3.1 555定时器原理图和引脚图555为一8脚封装的器件,其各引脚的名称和作用如下:1脚—GND,接地脚2脚—TL,低电平触发端3脚—Q,电路的输出端4脚—/RD,复位端,低电平有效5脚—V_C,电压控制端6脚—TH,阈值输入端7脚—DIS,放电端8脚—VCC,电源电压端,其电压范围为:3~18V定时器的主要功能取决于比较器,比较器的输出控制RS触发器和放电BJT 的状态。
图中4为复位输入端,当4为低电平时,不管其他输入端的状态如何,输出V0为低电平。
因此在正常工作时,应将其接高电平。
由图可知当5脚悬空时,比较器C1和C2的比较电压分别为2/3Vcc和1/3Vcc。
当V6>2/3Vcc,V2>1/3Vcc时,比较器C1输出低电平,比较器C2输出高电平,基本RS触发器被置0,放电三极管T导通,输出端V0为低电平。
当V6<2/3Vcc,V2<1/3Vcc时,比较器C1输出高电平,比较器C2输出低电平,基本RS触发器被置1,放电三极管T截止,输出端V0为高电平。