智能机器人専用输入输出信号
- 格式:doc
- 大小:474.00 KB
- 文档页数:18
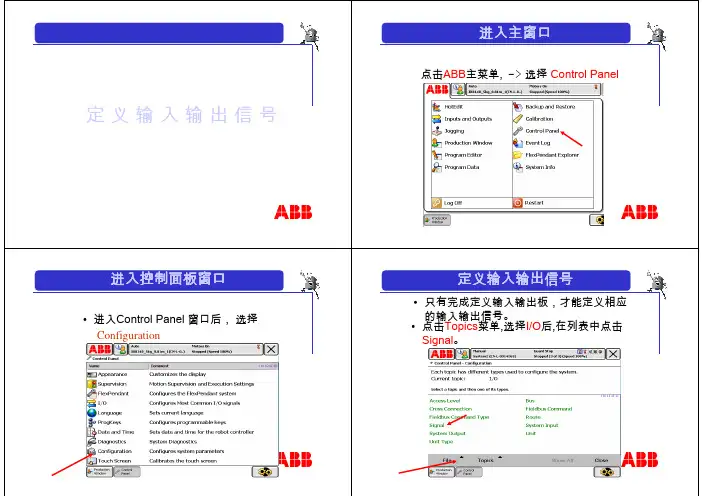
进入主窗口点击ABB主菜单, -> 选择 Control Panel定义输入输出信号进入控制面板窗口• 进入Control Panel 窗口后, 选择 Configuration定义输入输出信号• 只有完成定义输入输出板,才能定义相应 的输入输出信号。
• 点击Topics菜单,选择I/O后,在列表中点击 Signal。
定义输入输出信号• 点击Add, 增加输入输出信号。
定义输入输出信号• Name-信号名称。
按住Name进入文本编辑窗口,定义输入输 出信号名称,在系统内名称不允许重复, 第一位必须为字母,最长 16 位字符。
定义输入输出信号• Type of signal-输入输出信号的类型。
按住Type of signal, 在出现的列表中选择相 应的信号类型。
定义输入输出信号• Assigned to unit-分配输入输出板。
按住Assigned to unit,在列表中选择相应的 输入输出板。
定义输入输出信号• Unit mapping -映射物理端口。
按住该选项,进入输入窗口输入相应的映射 端口号.与输入输出板的特性相关。
定义输入输出信号• Access level 按住Access level,在列表中选择相应的 Access level 。
定义数字输入信号-DI 及GI• Filter time passive-低电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 0 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Filter time active-高电平保持时间。
按住该选项进入输入窗口,输入相应值。
在机器人运动前,输入值 1 必须保持相应 时间,单位毫秒,最小 10毫秒 ( 默认 ),最 大 32 秒。
定义数字输入信号-DI 及GI• Invert physical value -信号倒置。
一、ABB 机器人信号配置简介ABB 机器人信号配置是指对机器人进行信号连接和配置,使其能够正常地接收和发送信号,实现与外部设备的联动和控制。
信号配置是机器人应用中的重要环节,直接影响到机器人的工作效率和精度。
二、ABB 机器人信号配置的基本步骤1. 准备工作在进行信号配置之前,首先要准备好相应的设备和工具,包括计算机、ABB 机器人控制器、连接线等。
2. 连接设备将计算机与ABB 机器人控制器进行连接,确保二者能够正常通信和传输数据。
3. 打开配置工具启动ABB 机器人信号配置的软件工具,通过该工具可以对机器人进行信号配置和调试。
4. 选择信号类型根据实际需求,选择需要配置的信号类型,如数字输入信号、数字输出信号、模拟输入信号、模拟输出信号等。
5. 配置信号参数在配置工具中,设置相应的信号参数,包括信号名称、信号类型、信号触发条件、信号响应动作等。
6. 联动设备根据配置的信号参数,将机器人与外部设备进行联动,并进行相应的调试和测试,确保信号配置的准确性和稳定性。
7. 保存配置完成信号配置后,及时保存配置文件,以便日后的参考和修改。
三、ABB 机器人信号配置的注意事项1. 确认设备联接正确在进行信号配置之前,要确保设备之间的连接是正确的,避免由于连接错误导致的信号配置异常。
2. 注意信号参数设置在配置信号参数时,要根据实际需求和设备特性进行合理设置,避免出现信号触发不准确或响应异常的情况。
3. 进行充分测试完成信号配置后,要对机器人和外部设备进行充分的联动测试,确保配置的信号能够正常触发和响应。
4. 系统稳定性验证在信号配置完成后,要对整个系统进行稳定性验证,确保配置的信号能够在长时间和高负荷的工作环境下稳定运行。
四、结语ABB 机器人信号配置是机器人应用中不可或缺的一部分,正确的信号配置能够提高机器人的工作效率和精度,实现更加智能化的生产制造。
通过以上步骤和注意事项的介绍,相信读者已经对ABB 机器人信号配置有了一定的了解,希望能够在实际工作中运用这些知识,提升工作效率,改善生产制造的质量和效益。

Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
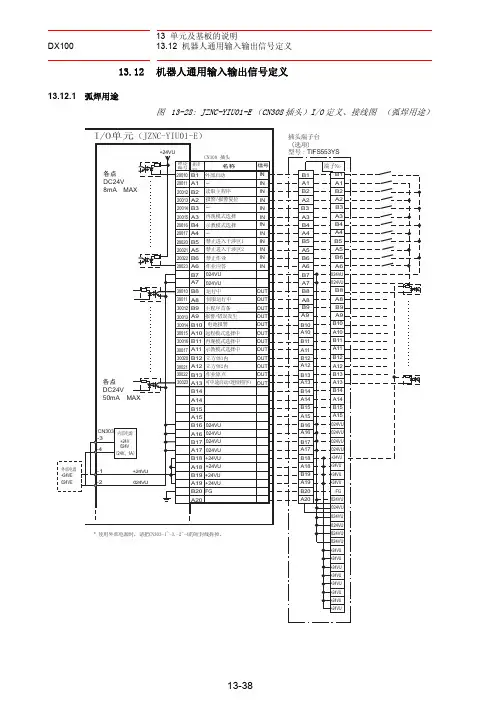
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。

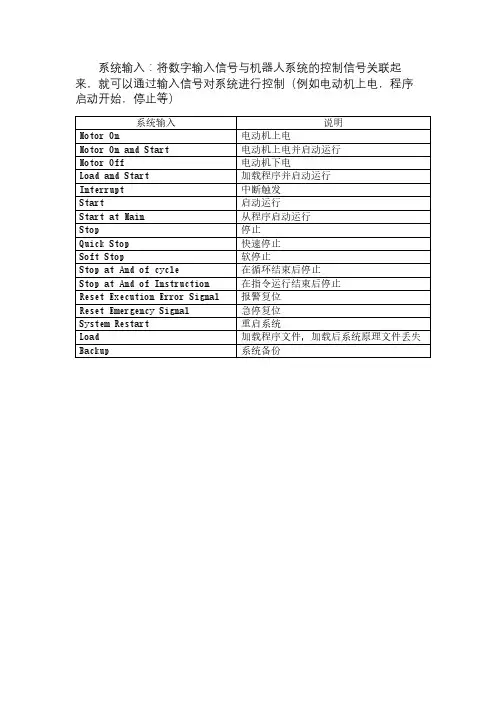
System Input Action内的功能:1、Motors On:伺服使能On,和控制柜上电机开启是一样的功能;2、Motors Off:伺服使能Off,机器人控制器会在状态变化前停止;3、Star t:启动,机器人程序启动,和示教器上启动按钮功能一致;4、Start at main:在主程序启动,机器人从主程序从头开始并启动;5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致;6、Quick Stop:快速停止,机器人程序、本体快速停止,和Stop不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样;7、Soft Sto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、Stop at end of cycle:程序在执行完整个循环时停止;9、Interrupt:中断,触发机器人中断程序;10、Load and start:从大容量存储装置中载入一段RAPID程序然后启动;11、Reset Emergency stop:复位紧急停止,仅在硬件急停没在按下的情况下有效;12、Reset Execution Error Signal:复位并输出出错信号;13、Motors On and Start:电机使能并启动程序;14、Stop at end of Instruction:程序会在执行完当前指令后停止;15、System Reset:重启系统;16、Load:从大容量存储装置中载入一段RAPID程序;17、Backup:备份,把当前系统内数据、参数备份;18、SimMode:模拟模式;19、Disable backup:避免启动一次备份;20、Limit Speed:极限速度,降低机器人运动速度;21、PP to Main:PP移至Main,与示教器上调试的选项一致;22、Collision Aviodance:激活碰撞避免,仅适用于IRB14000;23、Write Access:获得写权限;24、Enable Energy Saving:启动节能模式;System Output Status内的功能:1、Motor On:当电机使能为On时输出;2、Motor Off:当电机使能为Off时输出;3、Cycle On:执行机器人程序时输出;4、Emergency Stop:当紧急停止被触发时输出;5、Auto On:自动运行时输出;6、Runchain Ok:安全链链OK;7、TCP Speed:TCP运行速度的模拟信号;8、Execution Error:报警出错时输出;9、Motor On State:电机在启动状态;10、Motor Off State:电机在关闭状态;11、Power Fair Error:程序无法在上电失败后从当前位置继续执行时输出;12、Motion Supervision Triggered:触发运动监控;13、Motion Supervision On:运动监控启动;14、Path return Region Error:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出;15、TCP Speed Reference:TCP编程速度的模拟信号;16、Simulated I/O:系统内至少有一个IO被仿真时输出;17、Mechanical Unit Active:机械单元启动;18、TaskExecution:执行已配置任务时输出;19、Mechanical Unit Not Moving:机械单元不在运动中;20、Production Execution Error:生产发生错误;21、Backup in progress:正在进行备份;22、Backup error:备份失败时输出;23、SimMode:仿真模式下输出;24、Limit Speed:由系统输入信号LimitSpeed触发;25、Collision Avoidance:碰撞避免激活时输出,仅限于IRB14000;26、Write Access:获得写权限;27、Energy Saving Blocked:节能模式下时输出;28、CPU Fan Not Running:中央处理器散热风扇没有启动;29、Temperature Warning:温度过高(95度);30、Absolute Accuracy Active:绝对精度激活时输出;31、SMB Bettery Charge Low:SMB电池电量过低;系统输入:系统输入的意义为当输入点为1时对应的功能动作。
ABB机器机器人组合信号的说明在ABB机器人中一共有三种信号类型,他们分别是1.数字量输入输出(DO/DI)、2.模拟量输入输出(AO/AI)、3.组合输入输出(GO/GI),这里针对第三种组合输入输出做详细介绍:1.什么是组合输入输出?解析:组输入输出就是把2个或2个以上的数字输入或者输出信号通过一个组输入输出信号去控制输出或者获取输入。
例如:ABB机器人在和PLC走IO通讯时,机器人需要通过DO1=1、DO2=0、DO3=1这样的组合去告诉PLC机器人取料完成,或者PLC通过DI1=1、DI2=1,DI3=0这样的组合来告诉机器人去取1号物料,那么用一般的程序如下:机器人输出:机器人输入;Setdo DO1,1; WaitDI DI1=1;Setdo DO2,0; WaitDI DI2=0;Setdo DO3,1; WaitDI DI3=1;这样的程序就会有两个问题:(1).整个程序很臃肿;(2).信号是顺序给的不是同时,PLC就会有可能误判。
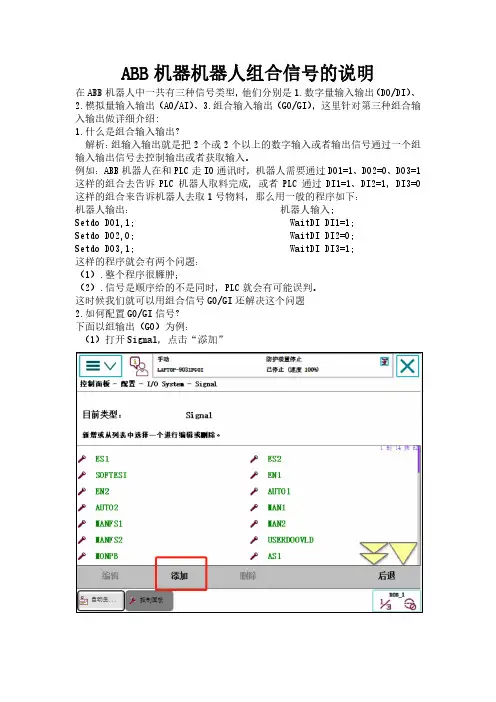
这时候我们就可以用组合信号GO/GI还解决这个问题2.如何配置GO/GI信号?下面以组输出(GO)为例:(1)打开Signal,点击“添加”(2)“Name”输入我们组输入/输出的名称,这里我以“GO1”为例(3).在Type of Signal中选择信号类型为组输出“Group Output”(4)在Assigned to Device 中选择的IO单元和需要绑定的DO信号一致。
(5)在Device Mapping填写地址填写地址原则:这里填写的地址和需要绑定的DO信号的地址一致例如地址是连续的:DO1地址是1,DO2地址是2,DO3地址是3则可以填:1-3如果DO的地址不是连续的:DO1地址是1,DO4地址是4,DO6地址是6 则可以用:1,4,6*此处地址一定要和需要绑定的DO地址一致(6)配置完点击“确定”,重启机器人,等待重启完成至此组信号已经全部配置完成,下面介绍GO的值如何计算因为GO是通过二进制的值取控制DO信号的输出,所以要输出DO1-DO3中的信号,就需要给GO赋予对应的二进制的值,按DO的地址在GO中排的位数对应的二进制数,需要第几位就拿他们相加。
System Input Action内的功能:1、Motors On :伺服使能 On,和控制柜上电机开启是同样的功能;2、Motors Off:伺服使能Off ,机器人控制器会在状态变化前停止;3、Star t :启动,机器人程序启动,和示教器上启动按钮功能一致;4、Start at main:在主程序启动,机器人从主程序重新开始并启动;5、Stop :停止,机器人程序停止,和示教器上停止按钮功能一致;6 、Quick Stop :迅速停止,机器人程序、本体迅速停止,和Stop 不同的是,迅速停止会让机器人本体迅速停下来,而停止会有些许的减速过程,二者停止的反响速度不同样;7、Soft Sto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止;8、Stop at end of cycle:程序在履行完好个循环时停止;9、Interrupt :中止,触发机器人中止程序;10、Load and start:从大容量储存装置中载入一段RAPID程序而后启动;11、Reset Emergency stop:复位紧迫停止,仅在硬件急停没在按下的状况下有效;12、Reset Execution Error Signal:复位并输出犯错信号;13、Motors On and Start:电机使能并启动程序;14、Stop at end of Instruction:程序会在履行完目前指令后停止;15、System Reset:重启系统;16、Load:从大容量储存装置中载入一段RAPID程序;17、Backup:备份,把目前系统内数据、参数备份;18、SimMode:模拟模式;19、Disable backup:防止启动一次备份;20、Limit Speed:极限速度,降低机器人运动速度;21、PP to Main: PP移至 Main,与示教器上浮试的选项一致;22、Collision Aviodance:激活碰撞防止,仅合用于IRB14000;23、Write Access :获取写权限;24、Enable Energy Saving:启动节能模式;System Output Status内的功能:1、Motor On :当电机使能为On 时输出;2、Motor Off :当电机使能为 Off 时输出;3、Cycle On :履行机器人程序时输出;4、Emergency Stop:当紧迫停止被触发时输出;5、Auto On :自动运转时输出;6、Runchain Ok :安全链链 OK;7、TCP Speed: TCP运转速度的模拟信号;8、Execution Error:报警犯错时输出;9、Motor On State:电机在启动状态;10、Motor Off State:电机在封闭状态;11、Power Fair Error:程序没法在上电失败后从目前地点持续履行时输出;12、Motion Supervision Triggered:触发运动监控;13、Motion Supervision On:运动监控启动;14、Path return Region Error:系统在试试启动有关机器人程序(可是因为有关机器人离编程路径太远,所以启动将会失败)时输出;15、TCP Speed Reference : TCP编程速度的模拟信号;16、Simulated I/O:系统内起码有一个 IO 被仿真时输出;17、Mechanical Unit Active:机械单元启动;——仅供参照18、TaskExecution :履行已配置任务时输出;19、Mechanical Unit Not Moving:机械单元不在运动中;20、Production Execution Error:生产发生错误;21、Backup in progress:正在进行备份;22、Backup error :备份失败时输出;23、SimMode:仿真模式下输出;24、Limit Speed :由系统输入信号LimitSpeed 触发;25、Collision Avoidance:碰撞防止激活时输出,仅限于IRB14000;26、Write Access :获取写权限;27、Energy Saving Blocked:节能模式下时输出;28、CPU Fan Not Running:中央办理器散热电扇没有启动;29、Temperature Warning:温度过高( 95 度);30、Absolute Accuracy Active:绝对精度激活时输出;31、SMB Bettery Charge Low:SMB电池电量过低;系统输入:系统输入的意义为当输入点为 1 时对应的功能动作。
ABB[a]-J-4ABB 机器人的IO 通信4.1 任务目标了解ABB 机器人I/O 通信的种类。
掌握常用ABB 标准I/O 板的配置。
掌握Profibus 适配器与PLC 进行通信的配置方法。
4.2 任务描述⏹以ABB 标准I/O 板DSQC651 为模块,模块单元为board10,总线连接DeviceNet1,地址为10,创建数字输入信号DI1、数字输出信号DO1、组输入信号GI1(4 位)、组输出信号GO1(4 位)和模拟输出信号AO1,并实现I/O 信号的监控及操作。
⏹除了通过ABB 机器人提供的标准I/O 板进行与外围设备进行通信以外,ABB 机器人还可以使用DSQC667模块通过Profibus 与PLC 进行快捷和大数据量的通信。
如何连接ABB03-5 Profibus 适配器?4.3 知识储备4.3.1ABB 机器人I/O 通信种类机器人提供了丰富的I/O 通信接口,可以轻松地实现与周边设备进行通信。
ABB 机器人注1:一种通信协议注2:不同厂商推出的现场总线协议关于ABB 机器人的I/O 通信接口的说明:1)ABB 的标准I/O 板提供的常用信号处理有数字输入di、数字输出do、模拟输入ai、模拟输出ao、以及输送链跟踪,在本章中会对此进行介绍。
2)ABB 机器人可以选配标准ABB 的PLC,省去了原来与外部PLC 进行通信设置的麻烦,并且在机器人精彩文档示教器上就能实现与PLC 相关的操作。
3)在本章中,以最常用的ABB 标准I/O 板DSQC651 和Profibus-DP 为例,进行详细的讲解如何进行相关的参数设定。
IRC 5 控制柜接口说明:标号说明A 附加轴,电源电缆连接器(不能用于此版本)B FlexPendant 连接器C I/O 连接器D 安全连接器E 电源电缆连接器F 电源输入连接器G 电源连接器H DeviceNet 连接器I 信号电缆连接器精彩文档精彩文档J 信号电缆连接器K 轴选择器连接器L 附加轴,信号电缆连接器(不能用于此版本)控制柜接口示意图:4.3.2ABB 标准I/O 板本节将介绍常用的ABB 标准I/O 板(具体规格参数以ABB 官方最新公布为准)。
機器人之専用輸出輸入接続配置於如下図之CRM2A Connector上、其中接続 01(IMSTP)、02(HOLD)、03(SFSPD)要連接B接點。
周辺機器INTERFACE A1専用輸入信號1 IMSTP(Immediate Stop)緊急停止1.1 意義:SOFTWARE 上之緊急停止“IMSTP 回路連接B 接點”回路“開”後、成爲緊急停止状態。
1.2 信號之使用範例(Relay 或 PLC):1.3 注意:本回路“B 接點”未使用時要回路短絡。
因爲機器人緊急停止對機械部份之負荷大、所以基本上機器人要一時停止時、使用“HOLD ”。
另外B 接點爲常閉開關、A 接點爲常開開關。
2 HOLD(一時停止)2.1 意義:一時停止的信號輸入時、回路在OFF 状態、機器人將減速停止。
機器人成爲PAUSE 状態。
再度啓動時、HOLD 信號ON 後、START 以PULSE 信號輸出。
安全PLUG X010緊急SW X011(B 接點)IMSTP Y100教導MODE SWX012機器人動作中HOLD(一時停止) ONOFF START(再度啓動) ONOFF2.2 信號之使用範例(Relay 或 PLC):注意:本回路“B 接點”未使用時要回路短絡。
2.3 備詿:HOLD 與IMSTP 輸入後、機器人停止時的差異。
*IMSTP ……馬達電源切断 “緊急時使用” *HOLD ……・馬達減速後停止 “平常運轉時使用”3 SFSPD(SAFETY SPEED)安全速度3.1 意義:安全柵内之教導作業時使用。
本信號OFF 時、外部啓動輸入信號(如RSR /PNS 或START)無効、以確保作業者之安全。
又機器人自動運轉中、本信號OFF 時機器人暫時停止。
此時可用教導盤操作機器人。
又、教導或再啓動暫時停止的機器人時有速度制限。
3.2 信號之使用範例(Relay 或 PLC):3.3 注意:本回路“B 接點”未使用時要回路短絡。
3.4 備詿:SFSPD 有効時、限制速度可由系統変数設定。
例如:* $SCR.$FENCEORD:設定安全柵開時的最高速度。
* $SCR.$SFJOGVLIM:設定完全柵開時、JOG 操作的最高速度。
* $SCR.$SFRUNOVLIM:設定安全柵開時、程式執行中的最高速度。
一時停止按鈕 X101機器人停止 M100HOLD Y101安全PLUG X010SFSPDY1024.1 意義:RSR /PNS 初期啓動信號之取消信號。
<CSTOP1輸入前><CSTOP1輸入後>4.2 信號之使用範例(Relay 或 PLC)(RSR 未使用時、不要使用):機器人状態RSR1 RSR2 RSR3 動作中(RSR1程式)RSR2RSR3機器人状態RSR1 RSR2 RSR3RSR 預約解除 (CYCLE STOP) X012CSTOP1 Y104A4.3 注意:系統変数 $SHELL_CFG.$USE_ABORT “FALSE ”時、且A 之状態爲。
“TRUE ”時、現在執行中之RSR1程式動作立即停止、且成爲終了状態。
4.4 備詿:一般的機器人之CYCLE 循環状態(RSR1輸入1次後、開始循環)之解除如下 <PROGRAM :RSR0001>1: UTOOL_NUM=1 ;2: LBL[1];3:J PR[1:HOME] 50% FINE ;53: END;* 詿:DI[1]是設定爲系統操作盤上的循環停止SW(ALTERNATE)。
5 FAULT RESET 異常解除5.1 意義:機器人異常発生後、異常原因解除的輸入信號。
本信號ON 時、機器人回復待機状態。
例如、FAULT RESET 的輸入、可解除緊急停止的状態。
若本信號ON /OFF 後、仍不會解除ALARM 時、表示異常還没有解決。
5.2 信號之使用範例(Relay 或 PLC):循環停止信號DI[1]輸入循環 控制盤 RESET 鈕 X020FAULT RESETY105操作盤 RESET 鈕 X0216.1 意義:在程式執行過程中、暫定停止。
若要再次啓動、請注意程式中的游標位置、啓動時將由目前游標位置接下去執行。
程式執行前是否出現對話框可由系統変数 $SHELL_CFG.$CONT_ONLY 設定。
PAUSED(一時停止)中之程式再啓動時、$SHELL_CFG.$CONT_ONLY 若設爲TRUE 、則將出現一對話框詢問、是否由游標所在位置啓動。
若設爲FALSE 、則無詢問、直接由游標所在位置啓動(標準設定) 爲確保安全、建議設爲TRUE 。
6.2 信號之使用範例(Relay 或 PLC):6.3 注意:$SHELL_CFG.$CONT_ONLY 若設爲FALSE 時、按START 後、將無預先警告而立即起動目前書面上程式。
故爲了安全起見、此時PLC 中要加裝上述的範例回路。
7 HOME現在本信號未使用。
8 ENBL8.1 意義:機器人動作許可信號。
當本信號OFF 時、無法執行程式。
故平常信號爲ON。
8.2 信號之使用範例(Relay 或 PLC):機器人動作HOLD(一時停止) ONOFFSTART(再度啓動)ONOFF最啓動鈕 X080機器人 PAUSED X036START Y106常時ONENBLY1089.1 意義:自動運転時、従外部選擇程式並起動的信號。
如下圖所示1個信號對應1個程式、最大選擇程式数量4個。
信號程式RSR1 RSR0001RSR2 RSR0002RSR3 RSR0003RSR4 RSR0004RSR程式啓動前的Timing Chart如下圖所示RSR1(1)ACK1(O)PROGRUN(O)RSR2(1)ACK2(O)9.2 信號之使用範例:(1)由外部按鈕直接起動RSR程式SW1製具1按鈕RSR1製具2按鈕RSR2製具3按鈕RSR3製具4按鈕RSR424VSW3SW4RSR的程式RSR0001RSR00021: J P[1] 50% FINE ;2: J P[2] 30% CNT10030: END(2)由汎用信號輸入啓動RSR 程式1: IF GI[1]=1 CALL A_PROG 2: IF GI[1]=2 CALL B_PROG20: IF GI[1]=20 CALL T_PROGRSR 00011: GO[1]=12: WAIT DI[10]=ON 20: ENDA_PROG ROBOTPROGRUN ROBOT BUSYAUTO START M100 車體定位 ROBOTATPERCHSHUTTE 抵達RSR1 Y100車體信號OKM100SDI1 Y101M201SDI2 Y102M202SDI8 Y108 M208 OK 1 M301SDO1M201 OK 2 M302SDO2M202 OK 8 M308SDO8M208 機種確認OKM310M302M301 M308SDI10(START)Y120M310機種信號機種確認10.1 意義:自動運転時、従外部選擇程式並起動的信號。
但是無法和RSR 同時使用。
PNS 啓動信號如下圖所示依二進位方式選擇程式啓動。
PNS 可選擇之程式最大至255個。
PNS 程式啓動前的Timing chart 如下圖所示CMDENBL(O) PNS1~8(1) 8PNSTROBE(1)読取PNS (内部処理) SNO1~8(O)SNACK(O)PROD _PROGRUN(O)要保持100msec 以上。
没有一直保持ON 的設定法。
10.2 信號之使用範例:PNS1 Y101M201PNS2 Y102M202PNS8 Y108M208 M300SNO1 M301M202SNO2 M307M208SNO8 機種確認OKM310M301M300 M307PROD_STARTY121M310 PNSTROBE Y120M250 Data SETOKM201SNACK PROGRUN BUSY8BIT詿:M201、M202・・…M208是輸送帯或周邊開關等所送出的信號。
SNO1、SNO2・…SNO8是機器人爲確認PNS****信號従外部所回来的信號。
10.3 備詿:RSR及PNS的程式名稱可由設定BASE號碼更改。
例如、RSR0001~RSR0004及PNS0001~PNS0255可分別改爲RSR0201~RSR0204及PNS5001~PNS5225.教示盤内的設定書面如下。
【RSR設定】【PNS設定】*BASE No 可能SYSTEM変数設定 $SHELL_CFG.$JOB_BASE ***11.1 意義:由PLC程式中選擇PNS1~8啓動輸出信號至機器人、並由PLC程式輸出至PNSTROBE信號(即選擇信號輸出完畢OK)。
當機器人收到此信號後、機器人將輸出(PNS1~PNS8)相同訊號至(SNO1~SNO8)、回到PLC做確認。
12 PROD_START12.1 意義:當PLC収到由機器人輸出之確認信號“SNACK”後、此信號可確認雙方選擇輸出是否爲相同信號。
當相同時、可由PLC送一訊號給機器人之PROD_START、依此信號啓動機器人。
若信號不相同時、可能爲信號線断線、此時不可由PLC給予PROD_START信號、此時請於操作盤上表示、“程式選擇錯誤”之Message Lamp。
PNS_STROBE與PROD_START爲PNS啓動信號。
RSR使用時、此信號不使用。
専用輸出信號1 CMDENBL1.1意義:本信號ON 時表示、PROD_START 、START 、RSR 等功能可使用。
其輸出條件爲機器人没有異常、且機器人處於Remote 状態。
且機器人符合以下條件。
(1) 教示盤T.P 處於OFF 状態。
(2) 控制盤上[Remote(外部控制)/Local(鍵盤控制)]之選擇鈕、選擇Remote(外部)。
(3) SFSPD 信號爲常閉接通ON 状態。
1.2信號之使用範例:1.3 注意:輸出條件需符号1之(1)、(2)、(3)項、故若有使用MMI 時、當本信號爲OFF 時、請於MMI 中顯示下列訊息告知操作者。
(1) 請確認教示盤T.P 處於OFF 状態。
(2) 請確認控制盤上選擇鈕選擇Remote(外部控制)。
(3) 請確認SFSPD 信號爲常閉接通ON 状態。
2 SYSRDY2.1意義:SERVO 電源ON 時輸出此信號、通常當電源ON 時即輸出(即系統正常)。
SERVO-OFF 状態、電源OFF 、HARD 接點SVOFF1~SVOFF2之間等系統有異常時、此時信號爲開状態(即不輸出信號)。
2.2信號之使用範例:CMDENBLROBOTREADY Y125SYSRDYY1263.1 意義:程式執行中、此信號輸出。