如何计算多维数组的地址数据结构
- 格式:docx
- 大小:78.25 KB
- 文档页数:4
三维数组存储位置计算方法
在编程中,我们经常需要使用数组来存储数据。
在一些特殊的情况下,我们需要使用三维数组来存储数据。
三维数组相比于二维数组可以存储更多的数据,但同时也需要更多的空间来存储。
在使用三维数组时,我们需要知道如何计算数据在数组中的存储位置,以下是三维数组存储位置计算方法:
假设我们有一个三维数组arr[x][y][z],其中x表示第一维的长度,y表示第二维的长度,z表示第三维的长度。
为了计算数组中一个元素的存储位置,我们需要使用以下公式:
index = (x * y * z) * i + (y * z) * j + z * k 其中,i表示第一维的下标,j表示第二维的下标,k表示第三维的下标。
通过这个公式,我们可以计算出任意一个元素在数组中的存储位置。
例如,如果我们要访问数组中的元素arr[2][3][4],我们可以使用以下公式计算其在数组中的存储位置:
index = (x * y * z) * 2 + (y * z) * 3 + z * 4 其中,x = 3,y = 5,z = 7。
将这些数据带入公式中,得到: index = (3 * 5 * 7) * 2 + (5 * 7) * 3 + 7 * 4 = 245 因此,元素arr[2][3][4]在数组中的存储位置为245。
通过以上的计算方法,我们可以方便地访问三维数组中的任意一个元素。
在编程中,我们可以将计算存储位置的代码封装成一个函数,方便调用。
2007 C C C 语言的特点,简单的C 程序介绍,C 程序的上机步骤。
1 、算法的概念2、简单的算法举例3、算法的特性4、算法的表示(自然语言、流程图、N-S 图表示) 1 、 C 的数据类型、常量与变星、整型数据、实型数据、字符型数据、字符串常量。
2、 C 的运算符运算意义、优先级、结合方向。
3、算术运算符和算术表达式,各类数值型数据间的混合运算。
4、赋值运算符和赋值表达式。
5、逗号运算符和逗号表达式。
1 、程序的三种基本结构。
2、数据输入输出的概念及在C 语言中的实现。
字符数据的输入输出,格式输入与输出。
1 、关系运算符及其优先级,关系运算和关系表达式。
2、逻辑运算符及其优先级,逻辑运算符和逻辑表达式。
3、if语句。
if语句的三种形式,if语句的嵌套,条件运算符。
4、switch 语句. 1 、while 语句。
2、do/while 语句。
3、for 语句。
4、循环的嵌套。
5、break 语句和continue 语句。
1 、一维数组的定义和引用。
2、二维数组的定义和引用。
3、字符数组。
4、字符串与字符数组。
5、字符数组的输入输出。
6、字符串处理函数1 、函数的定义。
2、函数参数和函数的值,形式参数和实际参数。
3、函数的返回值。
4、函数调用的方式,函数的声明和函数原型。
5、函数的嵌套调用。
6、函数的递归调用。
7、数组作为函数参数。
8、局部变量、全局变量的作用域。
9、变量的存储类别,自动变星,静态变量。
1 、带参数的宏定义。
2、“文件包含”处理。
1 、地址和指针的概念。
2、变量的指针和指向变量的指针变量。
3、指针变量的定义和引用。
4、指针变量作为函数参数。
5、数组的指针和指向数组的指针变量。
6、指向数组元素的指针。
7、通过指针引用数组元素。
8、数组名作函数参数。
9、二维数组与指针。
1 0、指向字符串的指针变星。
字符串的指针表示形式,字符串指针作为函数参数。
11 、字符指针变量和字符数组的异同。

如何计算多维数组的地址数据结构在计算多维数组的地址时,我们需要了解数组在内存中的存储方式。
在大多数编程语言中,多维数组是按顺序存储的,也就是说数组中的元素是连续存储的。
为了计算多维数组的地址,我们需要知道每个维度的长度以及元素的字节大小。
假设我们有一个三维数组`arr[a][b][c]`,并假设每个元素的字节大小为`sizeof(T)`,那么我们可以使用以下公式来计算元素在内存中的地址:```address = base_address + [(i * (b * c)) + (j * c) + k] * sizeof(T)```其中,`i`是第一个维度的索引,`j`是第二个维度的索引,`k`是第三个维度的索引,`base_address`是数组的起始地址。
让我们来详细解释一下这个公式。
在第一个维度中,有`i`个元素,每个元素占据了`(b * c) *sizeof(T)`的连续内存空间,所以第一个维度的偏移量是`i * (b * c) * sizeof(T)`。
在第二个维度中,有`j`个元素,每个元素占据了`c * sizeof(T)`的连续内存空间,所以第二个维度的偏移量是`j * c * sizeof(T)`。
在第三个维度中,有`k`个元素,每个元素占据了`sizeof(T)`的连续内存空间,所以第三个维度的偏移量是`k * sizeof(T)`。
最终,我们将这三个偏移量相加,并加上`base_address`,就可以获得元素在内存中的准确地址。
需要注意的是,这个公式是针对三维数组的情况,对于更高维度的数组,我们可以将其转化为多个三维数组的嵌套来计算。
除了上述方法外,有些编程语言也提供了直接获取多维数组元素地址的方法或函数。
这样,我们不需要手动计算多维数组的地址,而可以直接使用语言提供的功能来进行访问。
总结起来,计算多维数组地址的关键是理解数组在内存中的存储方式,并利用索引和偏移量的关系来计算得到准确的地址。
数据结构之数组(Array)详解数组(Array)是由相同类型的元素(element)集合组成的固定长度(Size)的⼀种数据结构。
在内存中是连续存储的,因此可以通过索引(Index)计算出某个元素的地址。
下⾯介绍都是已java为⽰例。
对于没有详细了解过的相信有所收获。
基础知识声明type arrayName[] 或者 type[] arrayName。
如:int arrInt[] 或者int[] arrInt声明过程,只是告诉编译器: arrInt变量保存了⼀个int类型的数组。
这个过程并没有分配内存。
new分配内存分配内存需要通过new完成,同时指明类型和数组⼤⼩。
如:int[] arrInt = new int[4];数组中元素通过new分配后⾃动完成初始化,⼀般有⼏种:数字类型初始化为0(如:int/byte/short/long初始化为0,float/double初始化为0.0),布尔型初始化为false(boolean 初始化为false),String或者其他对象类型初始化为null。
数组赋值也有两种int[] arrInt = {1,3,5,7};或int[] arrInt = new int[4];arrInt[0] = 1;arrInt[1] = 3;arrInt[2] = 5;arrInt[3] = 7;⽰意图如下:多维数组多维数组类似,即数组中的元素也是数组。
如int[][] arrInt = {{1,3,5},{2,4,6},{0,10,20}};⽰意图如下:数组特点1. 索引(即下标) ⼀般从0开始,如java, C/C++。
2. 长度固定,在申请时长度固定。
内存连续,在内存中则是申请⼀块连续的固定⼤⼩的空间。
3. 数组有⼀维数组和多维数组,数组元素可以是基本数据类型(Primitive),也可以是对象引⽤(Reference)。
4. 随机访问,能够根据位置(下标)直接访问到元素。

《数据结构与算法》第五章数组和广义表本章介绍的数组与广义表可视为线性表的推广,其特点是数据元素仍然是一个表。
本章讨论多维数组的逻辑结构和存储结构、特殊矩阵、矩阵的压缩存储、广义表的逻辑结构和存储结构等。
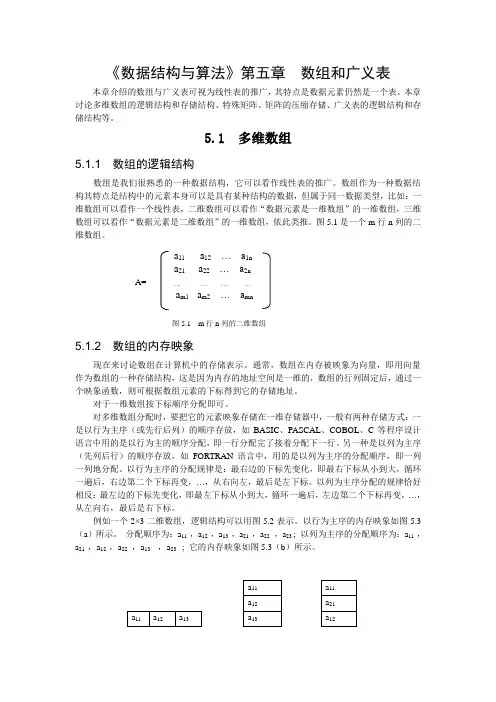
5.1 多维数组5.1.1 数组的逻辑结构数组是我们很熟悉的一种数据结构,它可以看作线性表的推广。
数组作为一种数据结构其特点是结构中的元素本身可以是具有某种结构的数据,但属于同一数据类型,比如:一维数组可以看作一个线性表,二维数组可以看作“数据元素是一维数组”的一维数组,三维数组可以看作“数据元素是二维数组”的一维数组,依此类推。
图5.1是一个m行n列的二维数组。
5.1.2 数组的内存映象现在来讨论数组在计算机中的存储表示。
通常,数组在内存被映象为向量,即用向量作为数组的一种存储结构,这是因为内存的地址空间是一维的,数组的行列固定后,通过一个映象函数,则可根据数组元素的下标得到它的存储地址。
对于一维数组按下标顺序分配即可。
对多维数组分配时,要把它的元素映象存储在一维存储器中,一般有两种存储方式:一是以行为主序(或先行后列)的顺序存放,如BASIC、PASCAL、COBOL、C等程序设计语言中用的是以行为主的顺序分配,即一行分配完了接着分配下一行。
另一种是以列为主序(先列后行)的顺序存放,如FORTRAN语言中,用的是以列为主序的分配顺序,即一列一列地分配。
以行为主序的分配规律是:最右边的下标先变化,即最右下标从小到大,循环一遍后,右边第二个下标再变,…,从右向左,最后是左下标。
以列为主序分配的规律恰好相反:最左边的下标先变化,即最左下标从小到大,循环一遍后,左边第二个下标再变,…,从左向右,最后是右下标。
例如一个2×3二维数组,逻辑结构可以用图5.2表示。
以行为主序的内存映象如图5.3(a)所示。
分配顺序为:a11 ,a12 ,a13 ,a21 ,a22,a23 ; 以列为主序的分配顺序为:a11 ,a21 ,a12 ,a22,a13 ,a23 ; 它的内存映象如图5.3(b)所示。
单元练习6一.判断题(下列各题,正确的请在前面的括号内打√;错误的打╳ ) (√)(1)n 维的多维数组可以视为n-1维数组元素组成的线性结构。
(√)(2)稀疏矩阵中非零元素的个数远小于矩阵元素的总数。
(ㄨ)(3)上三角矩阵主对角线以上(不包括主对角线中的元素),均为常数C 。
(√)(4)数组元素可以由若干个数据项组成。
(√)(5)数组的三元组表存储是对稀疏矩阵的压缩存储。
(ㄨ)(6)任何矩阵都可以进行压缩存储。
(ㄨ)(7)广义表是线性表的推广,所以广义表也是线性表。
(ㄨ)(8)广义表LS=(a 0,a 1,……a n-1),则a n-1是其表尾。
(√)(9)广义表((a,b),a,b)的表头和表尾是相等的。
(√)(10)一个广义表的表尾总是一个广义表。
二.填空题(1) 多维数组的顺序存储方式有按行优先顺序存储和 按列优先顺序存储两种。
(2) 在多维数组中,数据元素的存放地址可以直接通过地址计算公式算出,所以多维数组是一种 随机 存取结构。
(3) 在n 维数组中的每一个元素最多可以有 n 个直接前驱。
(4) 输出二维数组A[n][m]中所有元素值的时间复杂度为 O(n*m) 。
(5) 数组元素a[0..2][0..3]的实际地址上2000,元素长度是4,则LOC[1,2]= 2024 。
LOC[1,2]=2000+(1*4+2)*4(6)稀疏矩阵的三元组有 3 列。
(7)稀疏矩阵的三元组中第1列存储的是数组中非零元素所在的 行数 。
(8)n 阶对称矩阵,如果只存储下三角元素,只需要 n (n-1)/2 个存储单元。
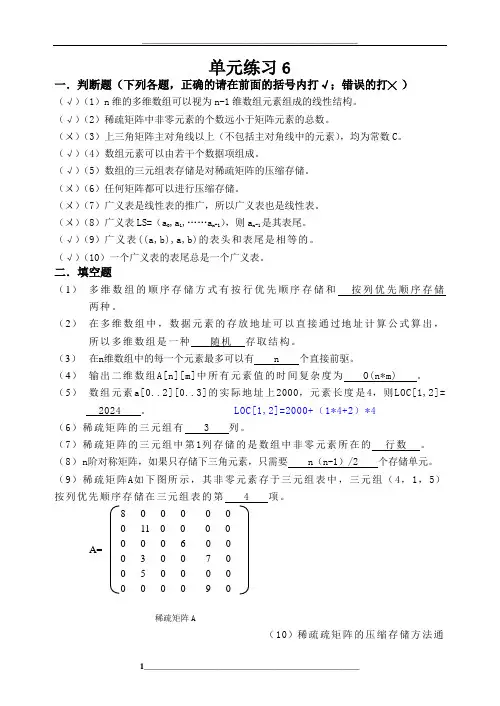
(9)稀疏矩阵A 如下图所示,其非零元素存于三元组表中,三元组(4,1,5)按列优先顺序存储在三元组表的第 4 项。
(10)稀疏疏矩阵的压缩存储方法通稀疏矩阵A A=常有三元组表和十字链表两种。
(11)任何一个非空广义表的表尾必定是广义表(或子表)。
(12)tail(head((a,b),(c,d))= b 。
一、判断题(第一章绪论)1.数据元素是数据的最小单元。
答案:错误2.一个数据结构是由一个逻辑结构和这个逻辑结构上的基本运算集构成的整体。
答案:错误3.数据的存储结构是数据元素之间的逻辑关系和逻辑结构在计算机存储器内的映像。
答案:正确4.数据的逻辑结构是描述元素之间的逻辑关系,它是依赖于计算机的。
答案:错误5.用语句频度来表示算法的时间复杂度的最大好处是可以独立于计算机的软硬件,分析算法的时间答案:正确(第二章线性表)6.取顺序存储线性表的第i个元素的时间同i的大小有关。
答案:错误7.线性表链式存储的特点是可以用一组任意的存储单元存储表中的数据元素。
答案:正确8.线性链表的每一个节点都恰好包含一个指针域。
答案:错误9.顺序存储方式的优点的存储密度大,插入和删除效率不如练市存储方式好。
答案:正确10.插入和删除操作是数据结构中最基本的两种操作,所以这两种操作在数组中也经常使用。
答案:错误(第三章栈)11.栈是一种对进栈和出栈作了限制的线性表。
答案:错误12.在C(或C++)语言中设顺序栈的长度为MAXLEN,则top=MAXLEN表示栈满。
答案:错误13.链栈与顺序栈相比,其特点之一是通常不会出现满栈的情况。
答案:正确14.空栈就是所有元素都为0上的栈。
答案:错误15.将十进制数转换为二进制数是栈的典型应用之一。
答案:正确(第四章队列)16.队列式限制在两端进行操作的线性表。
答案:正确17.判断顺序队列为空的标准是头指针和尾指针都指向同一结点。
答案:错误18.在循环链列队中无溢出现像。
答案:错误19.在循环队列中,若尾指针rear大于头指针front,则元素个数为rear-front。
答案:正确20.顺序队列和循环队列关于队满和队空的判断条件是一样的。
答案:错误(第五章串)21.串是n个字母的有限序列。
答案:错误22.串的堆分配存储是一种动态存储结构。
答案:正确23.串的长度是指串中不同字符的个数。
python多维数组定义Python是一种高级编程语言,它提供了许多数据结构和功能,使我们能够轻松地处理多维数组。
多维数组是一个可以在多个维度上存储和访问数据的结构。
在本文中,我们将探讨如何在Python中定义和使用多维数组。
在Python中,我们可以使用列表(list)来定义多维数组。
列表是一种有序的可变数据类型,可以包含任意类型的元素。
我们可以将一个列表作为另一个列表的元素,从而创建多维数组。
下面是一个简单的例子,展示了如何定义一个二维数组:```pythonarray_2d = [[1, 2, 3], [4, 5, 6], [7, 8, 9]]```在这个例子中,我们定义了一个名为`array_2d`的二维数组,它包含了3个子列表。
每个子列表都代表一行数据,而每个元素则代表一个列数据。
通过使用索引,我们可以访问和修改数组中的元素。
要访问二维数组中的元素,我们需要使用两个索引,一个用于指定行,另一个用于指定列。
例如,要访问第一行第二列的元素,我们可以使用以下代码:```pythonelement = array_2d[0][1]print(element) # 输出 2```在这个例子中,`array_2d[0]`表示第一行,而`[1]`表示第二列。
通过这种方式,我们可以访问到第一行第二列的元素,并将其赋值给变量`element`。
除了访问元素,我们还可以修改二维数组中的元素。
例如,如果我们想将第三行第三列的元素修改为10,我们可以使用以下代码:```pythonarray_2d[2][2] = 10```在这个例子中,`array_2d[2][2]`表示第三行第三列的元素,我们将其赋值为10。
除了二维数组,我们还可以定义更高维度的数组。
例如,下面是一个三维数组的定义示例:```pythonarray_3d = [[[1, 2], [3, 4]], [[5, 6], [7, 8]]]```在这个例子中,`array_3d`是一个三维数组,它包含了两个二维数组。
6数据结构复习题(广义表)一.判断题(下列各题,正确的请在前面的括号内打√;错误的打╳)(√)(1)n维的多维数组可以视为n-1维数组元素组成的线性结构。
(√)(2)稀疏矩阵中非零元素的个数远小于矩阵元素的总数。
(ㄨ)(3)上三角矩阵主对角线以上(不包括主对角线中的元素),均为常数C。
(√)(4)数组元素可以由若干个数据项组成。
(√)(5)数组的三元组表存储是对稀疏矩阵的压缩存储。
(ㄨ)(6)任何矩阵都可以进行压缩存储。
(ㄨ)(7)广义表是线性表的推广,所以广义表也是线性表。
(ㄨ)(8)广义表LS=(a0,a1,……a n-1),则a n-1是其表尾。
(√)(9)广义表((a,b),a,b)的表头和表尾是相等的。
(√)(10)一个广义表的表尾总是一个广义表。
二.填空题(1)多维数组的顺序存储方式有按行优先顺序存储和按列优先顺序存储两种。
(2)在多维数组中,数据元素的存放地址可以直接通过地址计算公式算出,所以多维数组是一种随机存取结构。
(3)在n维数组中的每一个元素最多可以有 n 个直接前驱。
(4)输出二维数组A[n][m]中所有元素值的时间复杂度为O(n*m) 。
(5)数组元素a[0..2][0..3]的实际地址上2000,元素长度是4,则LOC[1,2]= 2024 。
LOC[1,2]=2000+(1*4+2)*4(6)稀疏矩阵的三元组有 3 列。
(7)稀疏矩阵的三元组中第1列存储的是数组中非零元素所在的行数。
(8)n阶对称矩阵,如果只存储下三角元素,只需要 n(n-1)/2 个存储单元。
(9)稀疏矩阵A如下图所示,其非零元素存于三元组表中,三元组(4,1,5)按列优先顺序存储在三元组表的第 4 项。
A=稀疏矩阵A(10)稀疏疏矩阵的压缩存储方法通常有三元组表和十字链表两种。
(11)任何一个非空广义表的表尾必定是广义表(或子表)。
(12)tail(head((a,b),(c,d))= b 。
(13)设广义表((a,b,c)),则将c分离出来的运算是 head(tail(tail(head(L)))) 。
6数据结构复习题(广义表)一.判断题(下列各题,正确的请在前面的括号内打√;错误的打╳)(√)(1)n维的多维数组可以视为n-1维数组元素组成的线性结构。
(√)(2)稀疏矩阵中非零元素的个数远小于矩阵元素的总数。
(ㄨ)(3)上三角矩阵主对角线以上(不包括主对角线中的元素),均为常数C。
(√)(4)数组元素可以由若干个数据项组成。
(√)(5)数组的三元组表存储是对稀疏矩阵的压缩存储。
(ㄨ)(6)任何矩阵都可以进行压缩存储。
(ㄨ)(7)广义表是线性表的推广,所以广义表也是线性表。
(ㄨ)(8)广义表LS=(a0,a1,……a n-1),则a n-1是其表尾。
(√)(9)广义表((a,b),a,b)的表头和表尾是相等的。
(√)(10)一个广义表的表尾总是一个广义表。
二.填空题(1)多维数组的顺序存储方式有按行优先顺序存储和按列优先顺序存储两种。
(2)在多维数组中,数据元素的存放地址可以直接通过地址计算公式算出,所以多维数组是一种随机存取结构。
(3)在n维数组中的每一个元素最多可以有n 个直接前驱。
(4)输出二维数组A[n][m]中所有元素值的时间复杂度为O(n*m) 。
(5)数组元素a[0..2][0..3]的实际地址上2000,元素长度是4,则LOC[1,2]= 2024 。
LOC[1,2]=2000+(1*4+2)*4(6)稀疏矩阵的三元组有 3 列。
(7)稀疏矩阵的三元组中第1列存储的是数组中非零元素所在的行数。
(8)n阶对称矩阵,如果只存储下三角元素,只需要n(n-1)/2 个存储单元。
(9)稀疏矩阵A如下图所示,其非零元素存于三元组表中,三元组(4,1,5)按列优先顺序存储在三元组表的第 4 项。
A=稀疏矩阵A(10)稀疏疏矩阵的压缩存储方法通常有三元组表和十字链表两种。
(11)任何一个非空广义表的表尾必定是广义表(或子表)。
(12)tail(head((a,b),(c,d))= b 。
(13)设广义表((a,b,c)),则将c分离出来的运算是head(tail(tail(head(L)))) 。
一、课程内容5.1 多维数组(1课时)数组的定义数组(Arrays)是由一组类型相同的数据元素构造而成的。
它的每个元素由一个值和一组下标确定。
二维数组An1n2…nm的每个元素ai1i2…im都属于m个向量,最多可以有m个直接前趋和m个直接后继。
数组的顺序存储结构数组的顺序存储结构指的是用一组连续的存储单元依次存放数组元素。
行优先顺序行优先顺序:将数组元素按行向量排列,第i+1个行向量紧接在第i个行向量后面。
行优先顺序规定为先排最右的下标,从右向左,最后排最左下标。
列优先顺序列优先顺序:将数组元素按列向量排列,第j+1个列向量紧接在第j个列向量之后。
列优先顺序规定为先排最左下标,从左向右,最后排最右下标。
二维数组Amn按“行优先顺序”存储在内存中,假设每个元素占d个存储单元,则aij的地址计算函数为:LOC(aij)=LOC(a11)+[(i-1)×n+j-1]×d 对应C语言的二维数组:DataType A[m][n];数组A[m][n]的两个下标的下界均为0,上界分别为m-1、n-1,每个数据元素占k个存储单元,二维数组中任一元素a[i,j]的存储位置可由下列公式确定。
loc[i,j]=loc[0,0]+( n * i + j ) * k其中,loc[0,0]是A[0][0]的存储位置,它是该二维数组的起始地址。
loc[i,j]是A[i][j]的存储位置。
这个式子确定了C语言的二维数组元素的位置和下标的关系。
5.2 矩阵的压缩存储(1课时)压缩存储:即为多个相同的非零元素只分配一个存储空间,对零元素不分配空间。
所谓特殊矩阵(Special Matrices)是指非零元素或零元素的分布有一定规律的矩阵。
几种特殊矩阵的压缩存储:对称矩阵在一个n阶方阵A中,若元素满足下述性质:aij=aji0≤i,j≤n-1则称A为对称矩阵。
如图所示:存储元素为:{1,5,0,1,8,9,3,0,2,5,7,0,6,1,3},共15个。
数据结构重点知识点第一章概论1. 数据是信息的载体。
2. 数据元素是数据的基本单位。
3. 一个数据元素可以由若干个数据项组成。
4. 数据结构指的是数据之间的相互关系,即数据的组织形式。
5. 数据结构一般包括以下三方面内容:数据的逻辑结构、数据的存储结构、数据的运算①数据元素之间的逻辑关系,也称数据的逻辑结构,数据的逻辑结构是从逻辑关系上描述数据,与数据的存储无关,是独立于计算机的。
②数据元素及其关系在计算机存储器内的表示,称为数据的存储结构。
数据的存储结构是逻辑结构用计算机语言的实现,它依赖于计算机语言。
③数据的运算,即对数据施加的操作。
最常用的检索、插入、删除、更新、排序等。
6. 数据的逻辑结构分类: 线性结构和非线性结构①线性结构:若结构是非空集,则有且仅有一个开始结点和一个终端结点,并且所有结点都最多只有一个直接前趋和一个直接后继。
线性表是一个典型的线性结构。
栈、队列、串等都是线性结构。
②非线性结构:一个结点可能有多个直接前趋和直接后继。
数组、广义表、树和图等数据结构都是非线性结构。
7.数据的四种基本存储方法: 顺序存储方法、链接存储方法、索引存储方法、散列存储方法(1)顺序存储方法:该方法把逻辑上相邻的结点存储在物理位置上相邻的存储单元里,结点间的逻辑关系由存储单元的邻接关系来体现。
通常借助程序语言的数组描述。
(2)链接存储方法:该方法不要求逻辑上相邻的结点在物理位置上亦相邻,结点间的逻辑关系由附加的指针字段表示。
通常借助于程序语言的指针类型描述。
(3)索引存储方法:该方法通常在储存结点信息的同时,还建立附加的索引表。
索引表由若干索引项组成。
若每个结点在索引表中都有一个索引项,则该索引表称之为稠密索引,稠密索引中索引项的地址指示结点所在的存储位置。
若一组结点在索引表中只对应一个索引项,则该索引表称为稀疏索引稀疏索引中索引项的地址指示一组结点的起始存储位置。
索引项的一般形式是:(关键字、地址)关键字是能唯一标识一个结点的那些数据项。
多维数组地址的计算方法一、二维数组
若求Cl jJ2在内存中的存储位置:1・a hj2在dj〜°久+1段内的第丿・2的位置上:2・dj前共有力段,每段加个存储单元,HP:h2xj}.
因此a jJ2的存储地址为(英中厶为基本类型数拯的字节数):
LOC(j、9j2)= SC(0,0)+ 仮 x 人 + j2)L
若求a j}j2j i在内存中的存储位置,需根据各维下标的变化分段来计算:
1.当第一维下标为力时,djl前共有力段,其中每段内均可依次被划分成加段,加段又被划分成加个已不可再分的最小基本类型数据单元,因此前第“丿]段前中共有h2 xZ?3 x j}个存储单元:
2・当第二维下标为力时,"恥在第绻 至纬+1段内,本段内幻』2前共有力段,其中每段内均可依次被划分成加个已不可再分的最小基本类型数据单元,因
此前第a
jJ 2段前中共有仇x j 2个存储单元: 3.当第3维下标为力时,a
j i j 2j i 在幻也至幻也+1段内,本内段共有力个最基本的基本类型的数据单元,即丿3 因此,a jiJih 的存储地址的字节数为(貝中厶为基本类型数据所占的字节数):
LOC (7i ,J 2 '人)=LOC
(0,0,0)+ (6 x b 3 x J J + & x J 2)+J 3)L 三.多维数组
C 程序表示:A[J1][J2][ .. ][Jn]>其数据结构定义为:a ・ …jj 力=1,2, ......... ,b\i J2=l,2, . 02, ............ , Jn=l,2, .. ,bno 内存存储排列如下图:
若求 在内存中的存储位置,需根据各维下标的变化分段来计算:
• • •
1. 当第一维下标为力时,a hir-ir j n 在你 至绻+1段内JlJV'Jn 的位置上,其中你 前共有力段,其中每段内均可依次被划分成加段,加段又被划分
成加段,加段又可分为伽段, ................ ,如此划分下去,直至划分至b”个已不可再分的最小基本类型数据单元为止,因此前第。
Z 段前中共有
b2xb3xb4x........ xx b n x拆个存储单元:
• • •
2.当第二维下标为力时,a j[j2-jr j n在第段内的a hh至幻』+1段内的厶丿4…厶,你内a j l j2前共有力段,英中每段内均可依次被划分成加段,
6段又可分为山段,加段又被划分成加段,........... ,如此划分下去,直至划分至心个已不可再分的最小基本类型数据单元为止,因此前第。
_/』段前中共有
h3xb4 x ..... x /?zr-I xb n xL 个存储单元;
3................. :
• • •
4.当第i维下标为力时,…Z…人在口维坐标下第段内第至"/J2…知段内的丿J+1…丿",段内前共有》段,
其中每段内均可依次被划分成伤+】段,伤+】段又可分为伤+2段,山+2段又可分为h+3段,..... ,如此划分下去,直至划分至b”个已不可再分的最小基本类型数据单元为止,因此前第"川2…Z段前中共有bg x bi+2 X X /?…_! x b n X ji个存储单元
5.................
■
6.当第"维下标为%时,a jj2-Jrjn在小维的a jjy-j i-j…-i至%…jrh段内的第厶个位置上,本段内均为最基本的基本类型的数据单元,不能再继
■
续划分,因此a j[j2-jr i n在本段内的共有人个存储单元
最终得出,%・・』・・讥的存储地址的字节数为(其中厶为基本类型数摒所占的字节数):
LOC(J,山...... J J = LOC(0,0)+ (血xb3xb4x.......... x 悩xb n x j})+(b3xb4x .......... x xb n x j2)+ (b4xb5x............... x b 心xb n xj3)++ 亿 xZz +j n)L。