两轮自平衡小车设计
- 格式:pdf
- 大小:709.04 KB
- 文档页数:4
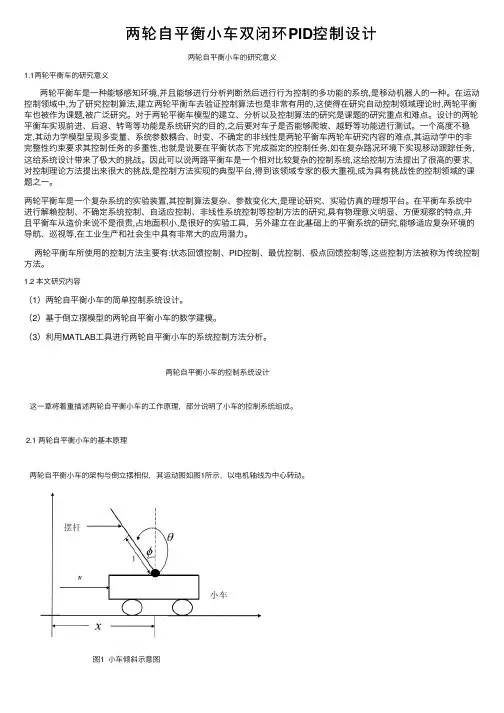
两轮⾃平衡⼩车双闭环PID控制设计两轮⾃平衡⼩车的研究意义1.1两轮平衡车的研究意义两轮平衡车是⼀种能够感知环境,并且能够进⾏分析判断然后进⾏⾏为控制的多功能的系统,是移动机器⼈的⼀种。
在运动控制领域中,为了研究控制算法,建⽴两轮平衡车去验证控制算法也是⾮常有⽤的,这使得在研究⾃动控制领域理论时,两轮平衡车也被作为课题,被⼴泛研究。
对于两轮平衡车模型的建⽴、分析以及控制算法的研究是课题的研究重点和难点。
设计的两轮平衡车实现前进、后退、转弯等功能是系统研究的⽬的,之后要对车⼦是否能够爬坡、越野等功能进⾏测试。
⼀个⾼度不稳定,其动⼒学模型呈现多变量、系统参数耦合、时变、不确定的⾮线性是两轮平衡车两轮车研究内容的难点,其运动学中的⾮完整性约束要求其控制任务的多重性,也就是说要在平衡状态下完成指定的控制任务,如在复杂路况环境下实现移动跟踪任务,这给系统设计带来了极⼤的挑战。
因此可以说两路平衡车是⼀个相对⽐较复杂的控制系统,这给控制⽅法提出了很⾼的要求,对控制理论⽅法提出来很⼤的挑战,是控制⽅法实现的典型平台,得到该领域专家的极⼤重视,成为具有挑战性的控制领域的课题之⼀。
两轮平衡车是⼀个复杂系统的实验装置,其控制算法复杂、参数变化⼤,是理论研究、实验仿真的理想平台。
在平衡车系统中进⾏解賴控制、不确定系统控制、⾃适应控制、⾮线性系统控制等控制⽅法的研究,具有物理意义明显、⽅便观察的特点,并且平衡车从造价来说不是很贵,占地⾯积⼩,是很好的实验⼯具,另外建⽴在此基础上的平衡系统的研究,能够适应复杂环境的导航、巡视等,在⼯业⽣产和社会⽣中具有⾮常⼤的应⽤潜⼒。
两轮平衡车所使⽤的控制⽅法主要有:状态回馈控制、PID控制、最优控制、极点回馈控制等,这些控制⽅法被称为传统控制⽅法。
1.2 本⽂研究内容(1)两轮⾃平衡⼩车的简单控制系统设计。
(2)基于倒⽴摆模型的两轮⾃平衡⼩车的数学建模。
(3)利⽤MATLAB⼯具进⾏两轮⾃平衡⼩车的系统控制⽅法分析。
本科毕业设计基于PID控制器的两轮自平衡小车设计摘要两轮自平衡小车具有体积小、结构简单、运动灵活的特点,适用于狭小和危险的工作空间,在安防和军事上有广泛的应用前景。
两轮自平衡小车是一种两轮左右平衡布置的,像传统倒立摆一样,本身是一种自然不稳定体,其动力学方程具有多变量、非线性、强耦合、时变、参数不确定性等特性,需要施加强有力的控制手段才能使其保持平衡。
本文在总结和归纳国内外对两轮自平衡小车的研究现状,提出了自己的两轮自平衡小车软硬件设计方案,小车硬件采用陀螺仪和加速度传感器检测车身的重力方向的倾斜角度和车身轮轴方向上的旋转加速度,数据通过控制器处理后,控制电机调整小车状态,使小车保持平衡。
由于陀螺仪存在温漂和积分误差,加速度传感器动态响应较慢,不能有效可靠的反应车身的状态,所以软件使用互补滤波算法将陀螺仪和加速度传感器数据融合,结合陀螺仪的快速的动态响应特性和加速度传感器的长时间稳定特性,得到一个优化的角度近似值。
文中最后通过实验验证了自平衡小车软硬件控制方案的可行性。
关键词:自平衡互补滤波数据融合倒立摆Two-wheeledSelf-balancingRobotMaXuedong(CollegeofEngineering,SouthChinaAgriculturalUniversity,Guangzhou510642,China) Abstract:Thetwo-wheeledself-balancingrobotissmallinmechanism,withsimplestructureandcanmakeflexiblemotion,目录华南农业大学本科生毕业设计成绩评定表1前言研究意义应用意义。
自平衡车巧妙地利用地心引力使其自身保持平衡,并使得重力本身成为运动动能的提供者,载重越大,行驶动能也就越大,具有环保的特点(胡春亮等,2007)。
驾驶者不必担心掌握平衡,车体自身的平衡稳定性,使得原本由于平衡能力障碍而无法骑自行车的人群也同样可以驾驭。
自平衡小车设计汇报摘要.......................................................................... 错误!未定义书签。
一、系统完毕旳功能............................................... 错误!未定义书签。
二、系统总体设计原理框架图 ............................... 错误!未定义书签。
三.系统硬件各个构成部分简介 ............................. 错误!未定义书签。
四、软件设计 .......................................................... 错误!未定义书签。
五、制作困难 .......................................................... 错误!未定义书签。
六.总结..................................................................... 错误!未定义书签。
摘要:本作品采用STM32单片机作为主控制器,用一种陀螺仪传感器来检测车旳状态,通过TB6612控制小车两个电机,来使小车保持平衡状态,通过蓝牙与小车上蓝牙模块连接以控制小车运行状态。
关键字:智能小车;单片机;陀螺仪;蓝牙模块。
一、系统完毕旳功能根据老师旳指导规定,在规定旳时间内,由团体合作完毕两轮自平衡小车旳制作,使小车在一定期间内可以自助站立并且自由行走,以和原地转圈,上坡和送高处跃下站立。
二、系统总体设计原理框架图图2.1 系统总体框图三.系统硬件各个构成部分简介3.1.STM32单片机简介(stm32rbt6)主控模块旳STM32单片机是控制器旳关键部分。
该单片机是ST意法半导体企业生产旳32位高性能、低成本和低功耗旳增强型单片机,它旳内核采用ARM企业最新生产旳Cortex—M3架构,最高工作频率可达72MHz,256K旳程序存储空间、48K旳RAM,8个定期器/计数器、两个看门狗和一种实时时钟RTC,片上集成通信接口有两个I2C、3个SPI、5个USART、一种USB、一种CAN、两个和一种SDIO,并集成有3个ADC和一种DAC,具有80个I/0端口。
两轮自平衡小车毕业设计毕业设计题目:两轮自平衡小车设计一、毕业设计背景与意义目前,智能机器人技术已经在各个领域得到广泛的应用,其中自平衡小车是一种非常具有代表性的机器人。
自平衡小车能够通过自身的控制系统来保持平衡姿态,并能够实现各种转向和动作。
因此,自平衡小车不仅能够广泛应用于工业生产中,还可以成为搬运、巡逻和助力等领域的优秀协助工具。
本毕业设计的目标是设计和实现一种能够自动控制、实现平衡的两轮自平衡小车。
通过这个设计,进一步探究并研究自平衡技术的原理及应用,增加对机器人控制系统和传感器的理解,提高对计算机控制和嵌入式系统的应用能力。
二、毕业设计的主要内容和任务1.研究和调研a)研究两轮自平衡小车的构造和原理;b)调研目前市场上相关产品,并分析其特点和存在的问题。
2.模块设计a)根据研究结果,设计自平衡小车的主要模块,包括平衡控制模块、动作控制模块和传感器模块;b)设计相关控制算法和策略,使小车能够保持平衡并能够实现转向和动作。
3.硬件搭建和调试a)根据模块设计的结果,搭建小车的硬件系统,包括选择适用的电机、陀螺仪、加速度计等;b)进行相应的调试和优化,保证小车的平衡和动作控制能力。
4.软件开发和系统集成a)开发小车的控制系统软件,包括实时控制系统和传感器数据处理等;b)将硬件系统和软件系统进行有机地集成,实现小车的平衡和动作控制。
5.实验和测试a)进行实验测试,验证设计的有效性和稳定性;b)进行相关的性能测试和比较研究。
三、设计预期成果1.自平衡小车的系统设计和实现,能够平衡姿态并能够实现转向和动作控制;2.控制系统软件的开发和优化,实现小车的实时控制和数据处理;3.相关模块和算法的设计和实现,如平衡控制模块和动作控制模块;4.实验和测试结果的总结和分析;5.毕业设计报告的撰写。
四、设计周期和工作安排1.阶段1:研究和调研阶段(1周)2.阶段2:模块设计阶段(2周)3.阶段3:硬件搭建和调试阶段(2周)4.阶段4:软件开发和系统集成阶段(2周)5.阶段5:实验和测试阶段(1周)6.阶段6:总结和报告撰写阶段(2周)五、预期解决的关键问题和技术难点1.小车平衡控制算法的设计和优化;2.小车动作控制算法的设计和优化;3.小车硬件系统与软件系统的有效集成;4.多个传感器数据的处理和融合。
两轮自平衡小车设计报告设计报告:两轮自平衡小车一、引言二、设计理念本设计希望实现一个简洁、稳定和高效的两轮自平衡小车。
考虑到小车需要快速响应外界环境变化,并迅速做出平衡调整,因此采用了传感器、控制器和执行机构相结合的设计思路。
通过传感器获取小车倾斜角度和加速度等数据,通过控制器对采集的数据进行处理和判断,并通过执行机构实时调整车身的倾斜角度,以实现平衡行走。
三、原理四、硬件结构1.车身结构:车身由两个电机、一个控制器、一个电池和一个平衡摆杆组成。
2.电机:采用直流无刷电机,具有较高的转速和输出功率。
3.控制器:采用单片机控制模块,能够对传感器数据进行处理和判断,并输出控制信号给电机。
4.传感器:主要包括陀螺仪、加速度计和倾斜传感器,用于感知小车的倾斜角度和加速度等数据。
5.电池:提供小车的电力供应,保证小车正常运行。
五、软件控制小车的软件控制主要包括数据处理和判断、控制信号生成和输出三个方面。
1.数据处理和判断:通过获取的传感器数据,包括倾斜角度和加速度等信息,根据预设的控制算法进行数据处理和判断。
2.控制信号生成:根据处理和判断得出的结果,生成相应的控制信号。
控制信号包括电机的转动方向和速度。
3.控制信号输出:将生成的控制信号输出给电机,实现倒立摆的平衡。
六、小车性能测试为了验证小车的设计和功能是否符合预期,进行了多项性能测试。
1.平衡行走测试:将小车放在平坦的地面上,通过传感器检测到小车的当前倾斜角度并进行调整,实现小车的自平衡行走。
2.转向测试:在平衡行走的基础上,通过控制信号调整两个电机的速度差,从而实现小车的转向。
3.避障测试:在平衡行走和转向的基础上,添加超声波传感器等避障装置,实现小车的避障功能。
七、总结通过本设计报告的详细介绍,我们可以看出两轮自平衡小车具备平衡行走、转向和避障等功能,为用户提供了一个稳定、高效的移动平台。
未来,我们将进一步优化小车的设计和控制算法,提高小车的性能和应用范围。
两轮自平衡小车控制系统的设计摘要:介绍了两轮自平衡小车控制系统的设计与实现,系统以飞思卡尔公司的16位微控制器MC9S12XS128MAL作为核心控制单元,利用加速度传感器MMA7361测量重力加速度的分量,即小车的实时倾角,以及利用陀螺仪ENC-03MB测量小车的实时角速度,并利用光电编码器采集小车的前进速度,实现了小车的平衡和速度控制。
在小车可以保持两轮自平衡前提下,采用摄像头CCD-TSL1401作为路径识别传感器,实时采集赛道信息,并通过左右轮差速控制转弯,使小车始终沿着赛道中线运行。
实验表明,该控制系统能较好地控制小车平衡快速地跟随跑道运行,具有一定的实用性。
关键词:控制;自平衡;实时性近年来,随着经济的不断发展和城市人口的日益增长,城市交通阻塞以及耗能、污染问题成为了一个困扰人们的心病。
新型交通工具的诞生显得尤为重要,两轮自平衡小车应运而生,其以行走灵活、便利、节能等特点得到了很大的发展。
但是,昂贵的成本还是令人望而止步,成为它暂时无法广泛推广的一个重要原因。
因此,开展对两轮自平衡车的深入研究,不仅对改善平衡车的性价比有着重要意义,同时也对提高我国在该领域的科研水平、扩展机器人的应用背景等具有重要的理论及现实意义。
全国大学生飞思卡尔智能车竞赛与时俱进,第七届电磁组小车首次采用了两轮小车,模拟两轮自平衡电动智能车的运行机理。
在此基础上,第八届光电组小车再次采用两轮小车作为控制系统的载体。
小车设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械及能源等多个学科的知识。
1 小车控制系统总体方案小车以16位单片机MC9S12XS128MAL作为中央控制单元,用陀螺仪和加速度传感器分别检测小车的加速度和倾斜角度[1],以线性CCD采集小车行走时的赛道信息,最终通过三者的数据融合,作为直流电机的输入量,从而驱动直流电机的差速运转,实现小车的自动循轨功能。
同时,为了更方便、及时地观察小车行走时数据的变化,并且对数据作出正确的处理,本系统调试时需要无线模块和上位机的配合。
基于PID控制器的两轮自平衡小车设计一、引言在自动控制领域中,PID控制器是一种常用的控制器。
它通过对系统输出进行反馈,来调节系统的输入,使系统的输出尽可能接近预期值。
本文将基于PID控制器设计一个两轮自平衡小车。
二、系统模型两轮自平衡小车是由两个驱动电机控制的,通过控制电机的转速来实现小车的前进、后退、转向等功能。
小车的整体结构是一个倒立摆,通过控制电机的转速,使其保持垂直状态。
系统的输入是电机转速,输出是小车的倾斜角度。
三、PID控制器PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
这三个部分根据误差来计算控制信号,实现对系统的控制。
1.比例控制部分:比例控制器根据误差的大小来计算控制信号。
误差是指系统输出与期望输出之间的差异。
比例控制器的计算公式为u_p=K_p*e(t),其中u_p是比例输出,K_p是比例增益,e(t)是误差。
2. 积分控制部分:积分控制器根据误差的累积值来计算控制信号。
积分控制器的计算公式为u_i = K_i * ∫e(t)dt,其中u_i是积分输出,K_i是积分增益,∫e(t)dt是误差的累积值。
3. 微分控制部分:微分控制器根据误差的变化率来计算控制信号。
微分控制器的计算公式为u_d = K_d * de(t)/dt,其中u_d是微分输出,K_d是微分增益,de(t)/dt是误差的变化率。
PID控制器的输出信号为u(t)=u_p+u_i+u_d,其中u(t)是控制信号。
四、设计与实现在设计两轮自平衡小车的PID控制器时,需要根据系统的特性来选择合适的参数。
通常可以通过试验或仿真来获得系统的模型,进而进行参数调节。
1.参数调节:首先,可以将系统的转角作为输入信号,通过试验或仿真来获得小车的倾斜角度与转角的关系。
然后,可以根据比例、积分和微分控制部分的特性,来选择合适的增益参数。
比例增益越大,系统的响应速度越快,但可能会引起震荡;积分增益可以消除静态误差,但可能会引起过冲;微分增益可以减小震荡,但可能会引起超调。
两轮自平衡小车的设计与实现一、本文概述随着科技的飞速发展,智能化、自主化已经成为现代机器人技术的重要发展方向。
两轮自平衡小车作为一种典型的动态稳定控制机器人,其设计与实现技术对于推动机器人技术的进步具有重要意义。
本文旨在深入探讨两轮自平衡小车的设计理念、实现方法以及关键技术,为相关领域的研究者和爱好者提供有益的参考。
本文将首先介绍两轮自平衡小车的基本概念和原理,阐述其动态稳定控制的基本思想。
随后,将详细介绍两轮自平衡小车的硬件设计,包括电机驱动、传感器选型、控制器设计等关键部分,并阐述各部件之间的协同工作原理。
在此基础上,本文将重点探讨两轮自平衡小车的软件实现,包括平衡控制算法、运动控制算法以及人机交互界面设计等。
本文还将对两轮自平衡小车的性能优化和实际应用进行深入分析,探讨如何提高其稳定性、响应速度以及续航能力等问题。
本文将对两轮自平衡小车的发展趋势和前景进行展望,为相关领域的研究和发展提供有益的参考。
通过本文的阐述,读者可以全面了解两轮自平衡小车的设计与实现过程,掌握其关键技术和应用方法,为推动机器人技术的发展做出贡献。
二、两轮自平衡小车的基本原理两轮自平衡小车,又称作双轮自稳车或双轮倒立摆,是一种基于动态稳定技术设计的个人交通工具。
其基本原理主要涉及到力学、控制理论以及传感器技术。
两轮自平衡小车的稳定性主要依赖于其独特的力学结构。
与传统三轮或四轮的设计不同,双轮自平衡小车只有两个支撑点,这意味着它必须通过动态调整自身姿态来维持稳定。
这种动态调整的过程类似于杂技演员走钢丝,需要精确的平衡和快速的反应。
实现自平衡的关键在于控制理论的应用。
两轮自平衡小车通常搭载有先进的控制系统,该系统通过传感器实时监测小车的姿态(如倾斜角度、加速度等),并根据这些信息计算出必要的调整量。
控制系统随后会向电机发送指令,调整小车的运动状态,以保持平衡。
传感器在两轮自平衡小车中扮演着至关重要的角色。
常见的传感器包括陀螺仪、加速度计和角度传感器等。
本科毕业设计(论文)题目两轮自平衡小车的设计学院电气与自动化工程学院年级专业班级学号学生姓名指导教师职称论文提交日期两轮自平衡小车的设计摘要近年来,两轮自平衡车的研究与应用获得了迅猛发展。
本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用飞思卡尔16位单片机MC9S12XS128为控制核心,完成了传感器信号的处理,滤波算法的实现及车身控制,人机交互等。
整个系统制作完成后,各个模块能够正常并协调工作,小车可以在无人干预条件下实现自主平衡。
同时在引入适量干扰情况下小车能够自主调整并迅速恢复稳定状态。
小车还可以实现前进,后退,左右转等基本动作。
关键词:两轮自平衡陀螺仪姿态检测卡尔曼滤波数据融合IDesign of Two-Wheel Self-Balance VehicleAbstractIn recent years, the research and application of two-wheel self-balanced vehicle have obtained rapid development. This paper presents a design scheme of two-wheel self-balanced vehicle. Gyroscope ENC-03 and MEMS accelerometer MMA7260 constitute vehicle posture detection device. System adopts Kalman filter to complete the gyroscope data and accelerometer data fusion.,and adopts freescale16-bit microcontroller-MC9S12XS128 as controller core. The center controller realizes the sensor signal processing the sensor signal processing, filtering algorithm and body control, human-machine interaction and so on.Upon completion of the entire system, each module can be normal and to coordinate work. The vehicle can keep balancing in unmanned condition. At the same time, the vehicle can be adjusted independently then quickly restore stability when there is a moderate amount of interference. In addition, the vehicle also can achieve forward, backward, left and right turn and other basic movements.Key Words: Two-Wheel Self-Balance; Gyroscope; Gesture detection; Kalman filter; Data fusionII目录1.绪论 (1)1.1研究背景与意义 (1)1.2两轮自平衡车的关键技术 (2)1.2.1系统设计 (2)1.2.2数学建模 (2)1.2.3姿态检测系统 (2)1.2.4控制算法 (3)1.3本文主要研究目标与内容 (3)1.4论文章节安排 (3)2.系统原理分析 (5)2.1控制系统要求分析 (5)2.2平衡控制原理分析 (5)2.3自平衡小车数学模型 (6)2.3.1两轮自平衡小车受力分析 (6)2.3.2自平衡小车运动微分方程 (9)2.4 PID控制器设计 (10)2.4.1 PID控制器原理 (10)2.4.2 PID控制器设计 (11)2.5姿态检测系统 (12)2.5.1陀螺仪 (12)2.5.2加速度计 (13)2.5.3基于卡尔曼滤波的数据融合 (14)2.6本章小结 (16)3.系统硬件电路设计 (17)3.1 MC9SXS128单片机介绍 (17)3.2单片机最小系统设计 (19)3.3 电源管理模块设计 (21)3.4倾角传感器信号调理电路 (22)III3.4.1加速度计电路设计 (22)3.4.2陀螺仪放大电路设计 (22)3.5电机驱动电路设计 (23)3.5.1驱动芯片介绍 (24)3.5.2 驱动电路设计 (24)3.6速度检测模块设计 (25)3.6.1编码器介绍 (25)3.6.2 编码器电路设计 (26)3.7辅助调试电路 (27)3.8本章小结 (27)4.系统软件设计 (28)4.1软件系统总体结构 (28)4.2单片机初始化软件设计 (28)4.2.1锁相环初始化 (28)4.2.2模数转换模块(ATD)初始化 (29)4.2.3串行通信模块(SCI)初始化设置 (30)4.2.4测速模块初始化 (31)4.2.5 PWM模块初始化 (32)4.3姿态检测系统软件设计 (32)4.3.1陀螺仪与加速度计输出值转换 (32)4.3.2卡尔曼滤波器的软件实现 (34)4.4平衡PID控制软件实现 (36)4.5两轮自平衡车的运动控制 (37)4.6本章小结 (39)5. 系统调试 (40)5.1系统调试工具 (40)5.2系统硬件电路调试 (40)5.3姿态检测系统调试 (41)5.4控制系统PID参数整定 (43)5.5两轮自平衡小车动态调试 (44)IV5.6本章小结 (45)6. 总结与展望 (46)6.1 总结 (46)6.2 展望 (46)参考文献 (47)附录 (48)附录一系统电路原理图 (48)附录二系统核心源代码 (49)致谢 (52)V常熟理工学院毕业设计(论文)1.绪论1.1研究背景与意义近年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前科学研究最活跃的领域之一,移动机器人的应用范围越来越广泛,面临的环境和任务也越来越复杂,这就要求移动机器人必须能够适应一些复杂的环境和任务。
2012年省电子竞赛设计报告项目名称:自平衡小车姓名:连文金、林冰财、陈立镔指导老师:吴进营、苏伟达、李汪彪、何志杰日期: 2012年9月7日摘要:本组的智能小车底座采用的是网上淘宝的三轮两个电机驱动的底座,主控芯片为STC89C52,由黑白循迹采集模块对车道信息进行采集,将采集的信息传送到主控芯片,再由主控芯片发送相应的指令到电机驱动模块L298N,从而控制电机的运转模式。
关键词:STC89C52 L298N 色标传感器E18-F10NK 自动循迹引言:近现代,随着电子科技的迅猛发展,人们对技术也提出了更高的要求。
汽车的智能化在提高汽车的行驶安全性,操作性等方面都有巨大的优势,在一些特殊的场合下也能满足一些特殊的需要。
智能小车系统涉及到自动控制,车辆工程,计算机等多个领域,是未来汽车智能化是一个不可避免的大趋势。
本文设计的小车以STC89C52为控制核心,用色标传感器E18-F10NK作为检测元件实现小车的自动循迹前行。
一、系统设计本组智能小车的硬件主要有以STC89C52 作为核心的主控器部分、自动循迹部分、电机驱动部分。
1.1方案论证及选择:根据设计要求,可以有多种方法来实现小车的功能。
我们采用模块化思想,从各个单元电路选择入手进行整体方案的论证、比较与选择。
本方案以STC89C52作为主控芯片,通过按键进行模式的选择切换,按键一选择三轮循迹,按键二进行两轮循迹。
1.1.1模式一(三轮循迹):模式一(按键一控制):三轮循迹的时候,通过色标传感器和激光传感器进行实时的数据采集,反馈给主控芯片,主控芯片通过驱动L298来控制两路直流减速电机,从而保证路线的准确性。
引导线断开区域:由于小车是逆时针行走,考虑到惯性,五个传感器全部没有检测到,就直接一定程度上的左转,正好和惯性在一定程度上进行抵消,校正电机两轮电机的线性偏差。
直接从D区域走到E区域。
S型曲线:通过安装传感器,实地模拟所有经过的所有情况,来经过“S”型曲线。
两轮自平衡小车毕业设计04161120(总24页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除两轮自平衡小车的设计摘要最近这几年来,自平衡电动车的研发与商用获得了快速发展。
自平衡车具有体积小,运动十分灵活,便利,节能等特点。
本文提出了一种双轮自平衡小车的设计方案,机械结构采用了双轮双马达驱动;控制主要采用的是反馈调节,为了使车体更好的平衡,使用了PID调节方式;硬件上采用陀螺仪GY521 MPU-6050来采集车体的旋转角度以及旋转角加速度,同时采用了加速度传感器来间接测量车体旋转角度。
采用意法半导体ST 公司的低功耗控制器芯片stm32作为主控,采集上述传感器信息进行滤波,分析等操作后进而控制马达的驱动,从而达到反馈调节的闭环,实现小车的自动平衡。
系统设计,调试完成后,能够实现各个功能部件之间协调工作,在适度的干扰情形下仍然能够保持平衡。
同时,也可以使用手机上的APP通过蓝牙与小车通信控制小车的前进和后退以及转弯。
关键词:自平衡小车陀螺仪传感器滤波 APPDesign of Two-Wheel Self-Balance VehicleAbstractIn the last few years, with the development of commercial self balancing electric vehicle was developed rapidly. Self balancing vehicle has the advantages of small volume, the movement is very flexible, convenient, energy saving etc.. This paper presents a two wheeled self balancing robot design, mechanical structure adopts double motor drive; controlled mainly by the feedback regulation, in order to make the balance of the body better, with the PID regulation; hardware using gyroscope GY521 mpu-6050 to collect the rotation angle of the car body and the rotation angle acceleration. At the same time, acceleration sensor to measure indirectly body rotation angle. St, the low power consumption controller STM32 chip used as the main control, collecting the sensor information filtering, analysis backward and control motor drive, so as to achieve close loop feedback regulation, the realization of the car automatic balance. System design, debugging is completed, the coordination between the various functional components can be achieved, in the case of moderate interference can still maintain a balance. At the same time, you can also use the APP on the mobile phone with the car to control the car's forward and backward and turning.Key Words: Self balancing car gyroscope sensor filter APP目录1.绪论 0研究背景与意义 0自平衡小车的设计要点 0整体构思 0姿态检测系统 0控制算法 (1)本文主要研究目标与内容 (1)论文章节安排............................................... 错误!未定义书签。
第30卷第12期2020年12月长春大学学报JOURNAL OF CHANGCHUN UNIVERSITYVol.30No.12Dec.2020基于单片机的两轮自动平衡小车系统的设计杜丽敏,王岩(长春大学电子信息工程学院,长春130022)摘要:通过对倒立摆模型的受力分析,使两轮小车保持自平衡运行状态。
硬件上采用STM32F103ZET6单片机为核心控制器,利用MPU6050检测小车的速度和加速度,选择L298N驱动两个两相直流电机,采用霍尔测速码盘获得电机的转速,通过电磁检测电路实现电磁轨迹跟踪。
软件上采用PI和PD构成串级控制算法,MPU6050采集到的小车姿态数据经卡尔曼滤波进行数据处理。
最终实现了平衡车的稳定控制,完成了小车直立和行走功能。
关键词:两轮自动平衡小车;STM32F103ZET6;MPU6050;串级控制器;卡尔曼滤波中图分类号:TP273文献标志码:A文章编号:1009-3907(2020)12-0019-06两轮自动平衡车凭借其运动灵活、体积小巧、经济环保等优点逐渐被人们喜欢,并且在人们的生产生活中起着越来越重要的作用。
两轮自动平衡小车采用倒立摆工作原理,使小车保持平衡状态,其系统具有非线性、强耦合、不稳定等特点⑴。
因此,两轮自平衡车不仅在市场中有很大的价值和前景,在验证或校验控制算法和控制理论上更有一个很好的实验平台[2]。
文献[3-4]设计了基于LQR的最优控制器,该控制算法具有较快的动态响应速度,对于干扰具有良好的鲁棒性;文献[5]针对和LQR两种控制方法进行了对比分析,证明了前者在欠驱动系统的控制中具有一定的参考价值;文献[6]针对两轮平衡小车给出了硬件设计方案,以及基于PID的控制算法,实验中验证了设计方案的可行性。
本文主要研究了PID控制算法在两轮自动平衡小车中的应用。
首先,构建以STM32F103ZET6单片机为核心的两轮直立小车控制系统;其次,对两轮自动平衡小车进行了数学建模,验证了PD控制算法可以使小车保持直立稳定状态,进而基于PID设计了串级控制算法;最后将所设计的控制算法应用在了实物中,实现了小车的直立和行走功能。
学号:***********毕业设计说明书两轮自平衡小车的设计Design of self balancing two wheeled vehicle学院计算机与电子信息学院专业电子信息科学与技术摘要摘要近年来,两轮自平衡车研究和应用获得了快速的发展,但是存在陀螺仪漂移及加速度计的动态响应慢的问题。
针对这个问题,本文提出了一种改进的两轮平衡车设计方案,采用陀螺仪以及MEMS加速度传感器构成小车姿态检测模块,使用卡尔曼滤波算法完成陀螺仪与加速度计的数据融合。
系统选用飞思卡尔32位单片机Kinetis K10为控制核心,完成各种传感器的信号放大处理,滤波算法的研究实现以及车身的状态控制等。
整个系统完成后,各个模块能够正常协调工作,小车可以在无人干预的情况下实现直立平衡的功能。
同时两轮平衡小车能够在引入适量干扰的情况下,自动地调整小车的姿态并恢复稳定的状态,基本实现本文设计的要求。
关键词:两轮自平衡飞思卡尔姿态检测陀螺仪卡尔曼滤波广东石油化工学院本科毕业设计:两轮自平衡小车的设计AbstractIn recent years, the research and application of two-wheels self-balanced vehicle have an obtained rapid development, but there is the problem of slow response of dynamic drift and acceleration gyrometer. To solve this problem, this paper presents a design schemes of two-wheels self-balanced vehicles. Gyroscopes and MEMS accelerometer constitute vehicle posture detection device. System adopts to Kalman filters to complete the gyroscope‘s data and accelerometer data fusion, and adopts freescale32-bit microcontroller-Kinetis K10 as core controller. The center controller realize the sensor signal processing and the sensor signal processing, filtering algorithm and body control and so on. Upon completion of the entire system, the each modules can normal and to coordinate work. The vehicles can keep balancing in unmanned condition. At the same time, the vehicle can be adjust independently and then quickly restores stabilitly when there is a moderates amount of interference, basic to meet the design requirements.Key Words: Two-Wheel Self-Balance; Freescale; Gesture detection; Gyroscope; Kalman filter目录目录摘要 (I)目录 ................................................................................................................................................. I II 第1章绪论. (1)1.1研究背景及意义 (1)1.2两轮自平衡小车的发展概况 (1)1.2.1国外的研究成果 (2)1.2.2国内的研究成果 (2)1.3研究目的与内容 (3)1.4本章小结 (3)第2章系统原理分析 (4)2.1平衡控制原理分析 (4)2.2 自平衡车数学模型 (5)2.2.1 两轮平衡车的受力分析 (5)2.2.2两轮自平衡小车运动微分的方程 (8)2.3 PID控制器 (9)2.3.1 PID控制器原理 (9)2.3.2 PID控制器设计 (10)2.4 倾角检测系统 (11)2.4.1 陀螺仪 (12)2.4.2 加速度计 (12)2.4.3 基于卡尔曼滤波的数据融合 (13)2.5 本章小结 (15)第3章系统硬件设计 (16)3.1飞思卡尔Kinetis K10单片机介绍 (16)3.2 单片机最小系统设计 (17)3.3 电源管理模块设计 (18)3.4 倾角传感器信号调制电路 (19)3.4.1 加速度计电路设计 (19)3.4.2 陀螺仪电路设计 (19)广东石油化工学院本科毕业设计:两轮自平衡小车的设计3.5 直流无刷电机 (21)3.5.1 直流无刷电机特性 (21)3.5.2 直流无刷电机工作原理 (21)3.5.3 直流无刷电机调速 (21)3.6 电机驱动电路设计 (22)3.6.1 驱动芯片介绍 (22)3.6.2 驱动电路设计 (23)3.7 速度检测模块设计 (24)3.7.1 编码器介绍 (25)3.7.2 编码器的电路设计 (26)3.8 硬件设计中的抗干扰措施 (26)3.9 本章小结 (27)第4章系统软件设计 (28)4.1 单片机初始化软件设计 (29)4.1.1 延时初始化 (29)4.1.2 通用输入输出口(GPIO)初始化 (29)4.1.3 模数转换模块(ADC)初始化 (29)4.1.4 脉冲宽度调制模块(PWM)初始化 (29)4.2 姿态检测软件设计 (30)4.2.1 陀螺仪与加速度计输出值处理 (30)4.2.2 卡尔曼滤波器的软件实现 (31)4.3 PID控制算法软件实现 (32)4.4 运动控制 (33)4.5 本章小结 (34)第5章系统调试 (35)5.1 硬件调试 (35)5.2 软件调试 (35)5.3 串口调试 (36)5.4 本章小结 (37)全文总结与展望 (38)致谢 ...................................................................................................................错误!未定义书签。
双轮自平衡小车项目设计报告电子与信息工程学院项目设计报告项目名称双轮自平衡小车设计学生姓名戴磊103621015廖崎107221046李旭103621045王思然103522024专业电子信息科学与技术班级103622指导教师李东京万青赵东目录一自平衡小车的总体方案设计 (3)1、自平衡小车的设计方案 (3)2、自平衡小车的总体框图 (3)二系统的具体设计与实现 (4)1、单片机控制模块 (4)2、陀螺仪加速度计模块 (4)3、光码盘测速模块 (6)4、稳压模块 (7)5、电机驱动模块 (8)6、LCD1602显示模块 (11)三软件系统设计 (16)1、设计思想 (16)(1)PID技术 (16)(2)应用现状 (16)(3)PID调节规律 (17)(4)极点配置 (18)(5)极点配置条件 (18)(6)极点配置控制器 (21)2、程序流程图 (22)3、程序代码 (23)摘要随着科技进步,生活水平的提高,人们追求智能与舒适的愿望也日益强烈。
从而催生了许多智能化的产品。
如智能电视、智能小车等。
如何实现小车的小车的自动快捷驾驶,也成为人们心中的向往与疑问,基于这种趋势与需求,着眼于实际情况。
本文介绍了基于STC90C51单片机的自平衡小车系统的设计。
系统基于陀螺仪等传感器,利用PID平衡算法,对小车的速度倾斜角度平衡状态来进行检测,并通过单片机来控制电机来实现双轮小车自如平衡地运动。
从而实现小车智能自主控制的目的。
关键词:STC90C51 自平衡PID算法一自平衡小车的总体方案设计1、自平衡小车的设计方案该自平衡小车,采用STC90C51单片机和各种传感器的组合,构成了自平衡小车系统。
其系统主要由以下几个部分组成:单片机控制系统、陀螺仪加速度检测模块、光码盘测速模块、稳压模块、电机驱动模块、LCD1602显示模块组成。
本设计的自平衡小车工作原理:给小车通电,平衡放在地上,当小车开始倾斜时,陀螺仪及时地采集的小车倾斜角度数据传给单片机,而加速度计将车子倾斜的瞬时加速度采集后也传给单片机,同时,光码测速仪也将车子的实时速度采集后传给单片机。
2013年全国大学生电子设计竞赛两轮自平衡小车设计作者:杨魏,黄敏杰,夏俊逸2015.7.17摘要本文采用自制的两轮简易小车作为试验平台,以MEMS传感MPU6050为传感器的姿态感知系统,通过离散卡尔曼滤波器对两种传感器的数据进行滤波融合,选用32位单片机STM32F103RB为控制核心处理器,完成对数据的采集处理和车身控制,采用PID控制算法实现小车两轮自平衡。
用蓝牙控制前后运动。
实验结果验证了该系统的性能满足设计要求。
关键词:两轮自平衡;姿态感知;STM32F103RB;卡尔曼滤波;PID控制。
目录1系统方案 (1)1.1 姿态检测模块的论证与选择 (1)1.2 电机驱动模块的论证与选择 (1)2 系统硬件设计 (1)2.1 STM32F103RB 单片机系统 (2)2.1.1 STM32F103RB 单片机介绍 (2)2.1.2单片机最小系统设计 (3)2.1.3 电源管理模块设计 (4)2.2 姿态检测模块MPU-6050 (5)2.2.1 MPU-6050简介 (5)2.2.3数字运动处理器(DMP) (6)2.3速度检测模块设计 (7)2.3.1编码器介绍 (7)2.3.2 编码器电路设计 (8)2.4 电机驱动模块 (8)2.4.1 L298N简介 (8)2.4.2 L298N特点 (9)3理论分析与计算 (9)3.1 两轮平衡小车数学模型 (9)3.2 PID控制器设计 (10)3.2.1 PID控制器原理 (10)3.2.2 PID控制器设计 (11)3.2.3 PID程序 (12)3.3 基于卡尔曼滤波的数据融合 (13)4 系统软件设计 (15)4.1 系统软件设计框架 (15)4.2 资源模块初始化 (15)4.3 两轮小车姿态信息检测 (16)5测试方案与测试结果 (16)5.1测试方案 (16)5.1.1硬件连接检测 (16)5.1.2小车功能检测 (16)5.2 测试分析与结论 (16)1系统方案本系统主要由姿态检测模块、电机驱动模块、蓝牙模块、红外对管模块、电源模块组成,下面分别论证这几个模块的选择。
两轮自平衡小车设计
一、任务要求
图1两轮自平衡车
两轮自平衡车结构原理如图1所示,主控制器(DSP)通过采集陀螺仪和加速度传感器得到位置信号,通过控制电机的正反转实现保持小车站立。
1、通过控制两个电机正反运动,实现小车在原地站立。
2、实现小车的前进、后退、转弯、原地旋转、停止等运动;
二、方案实现
2.1电机选型
图2直流电机
两轮自平衡车由于需要时刻保持平衡,对于倾角信号做出快速响应,因此对电机转矩要求较大。
在此设计中选用国领电机生产的直流电机,其产品型号为GB37Y3530,工作电压6v-12v。
为增大转矩,电机配有1:30传动比的减速器。
2.2电机测速方案
图3霍尔测速传感器
在电机测速方案上主流的方案有两种,分别是光电编码器和霍尔传感器。
光电编码器测量精度由码盘刻度决定,刻度越多精度越高;霍尔传感器精度由永磁体磁极数目决定,同样是磁极对数越高精度越高。
由于两轮自平衡车工作于剧烈震动环境中,光电编码器不适应这种环境,因此选用霍尔传感器来测量速度。
电机尾部加装双通道霍尔效应编码器,AB双路输出,单路每圈脉冲16CPR,双路上下沿共输出64CPR,配合1:30的减速器传动比,可以计算出车轮转动一圈输出的脉冲数目为64X30=1920CPR,完全符合测速要求。
2.3电机驱动控制系统概述
本平台电机驱动采用全桥驱动芯片L298N,内部包含4通道逻辑驱动电路,两个H-Bridge的高电压、大电流双全桥式驱动器。
本驱动桥能驱动46V、2A 以下的电机。
其输出可以同时控制两个电机的正反转,非常适合两轮自平衡车开发,其原理图如下图所示
图4L298N原理图
采用脉宽调制方式(即PWM,Pulse Width Modulation)来调整电机的转速和转向。
脉宽调制是通过改变发出的脉冲宽度来调节输入到电机的平均电
压,即通过不同方波的平均电压不同来改变电机转速。
图5PWM脉宽调节示意
2.4倾角位置采集
倾角和角速度采集是两轮自平衡车控制的重点,选用MPU6050模块作为其采集模块。
图6MPU6050模块
模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态。
可以输出XYZ三个方向的角度、角速度以及角加速度,精度达到0.01度,非常适合自平衡车角度信号采集。
2.5两轮自平衡车平衡控制和转向控制
图4.1展示的整车平衡控制的控制框图,可以看到通过采集车轮转动角度θ和整车倾角角度ψ,经过PID控制器得出输出给电机的电压U。
图4.2给出小车转向控制以及车速控制的基本原理。
转向时通过给定两轮极性相反的转速信号,小车可以实现原地转向。
同时为了实现小车在非转向情况下能够直线运动,设置了转差检测,保证时刻纠正小车方向。
图7控制器平衡控制框图
图8控制器转向控制框图
两轮自平衡车最终设计如下图所示,通过修正平衡控制和转向控制参数,小车最终达到稳定工作状态。
图9两轮自平衡车实物图。