第6章 变形计算
- 格式:ppt
- 大小:808.50 KB
- 文档页数:29
完整版)《建筑地基基础设计规范》上的建筑物,应按变形控制设计原则,满足使用功能要求。
第5章“地基基础设计的计算方法”之强制性条文:第5.2.1条:地基基础设计中,应根据地基土和岩石的性质和特点,选择合适的承载力计算方法和参数,确保设计的合理性和安全性。
第6章“地基基础设计的变形计算”之强制性条文:第6.2.1条:地基基础设计中,应根据地基土和岩石的变形特点,选择合适的变形计算方法和参数,确保设计的合理性和安全性。
第7章“地基基础设计的稳定性计算”之强制性条文:第7.2.1条:地基基础设计中,应根据地基土和岩石的稳定性特点,选择合适的稳定性计算方法和参数,确保设计的合理性和安全性。
第8章“地基基础设计的施工及验收”之强制性条文:第8.2.1条:地基基础施工前,应进行地基土和岩石的勘察和试验,确定地基的性质和特点,制定合理的施工方案和验收标准。
第9章“地基基础设计的监测与检测”之强制性条文:第9.2.1条:地基基础施工后,应进行地基的监测和检测,及时发现和解决地基问题,确保建筑物的安全和稳定。
第10章“特殊地基基础设计”之强制性条文:第10.2.1条:特殊地基基础设计中,应根据地基的特殊性质和特点,选择合适的设计方法和参数,确保设计的合理性和安全性。
新规范于2002年4月1日开始实施,取代了原规范(GBJ7-89)。
新规范共有27条强制性条文,分别分配在第3章至第10章中。
新规范明确了地基基础设计中承载力极限状态和正常使用极限状态的使用范围和计算方法,并强调按变形控制设计的原则,满足建筑物使用功能的要求。
同时,对岩石分类和地基土的冻胀分类进行了细化,并增加了有限压缩层地基变形和回弹变形计算方法、岩石边坡支护设计方法、复合地基设计方法、基坑工程设计方法、地基基础检测与监测内容。
取消了壳体基础设计的规定。
新规范第1.0.2条明确规定了地基基础设计必须坚持因地制宜、就地取材、保护环境和节约资源的原则,精心设计。

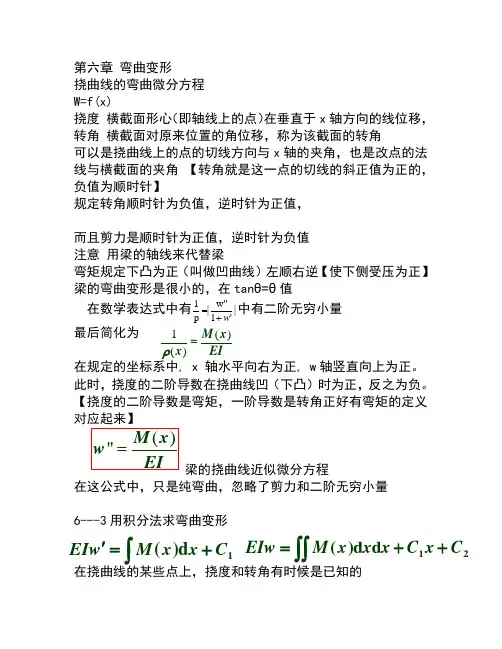
第六章 弯曲变形挠曲线的弯曲微分方程W=f(x)挠度 横截面形心(即轴线上的点)在垂直于x 轴方向的线位移, 转角 横截面对原来位置的角位移,称为该截面的转角可以是挠曲线上的点的切线方向与x 轴的夹角,也是改点的法线与横截面的夹角 【转角就是这一点的切线的斜正值为正的,负值为顺时针】规定转角顺时针为负值,逆时针为正值,而且剪力是顺时针为正值,逆时针为负值注意 用梁的轴线来代替梁弯矩规定下凸为正(叫做凹曲线)左顺右逆【使下侧受压为正】 梁的弯曲变形是很小的,在tan θ=θ值 在数学表达式中有|'1"w |p 1w +=中有二阶无穷小量 最后简化为 在规定的坐标系中, x 轴水平向右为正, w 轴竖直向上为正。
此时,挠度的二阶导数在挠曲线凹(下凸)时为正,反之为负。
【挠度的二阶导数是弯矩,一阶导数是转角正好有弯矩的定义对应起来】梁的挠曲线近似微分方程 在这公式中,只是纯弯曲,忽略了剪力和二阶无穷小量6---3用积分法求弯曲变形在挠曲线的某些点上,挠度和转角有时候是已知的 1()()M x x EIρ=()"M x w EI =1()d EIw M x x C '=+⎰12()d d EIw M x x x C x C =++⎰⎰积分常数的确定1.边界条件简支梁左右胶支座挠度为0;悬臂梁固定端挠度是零,转角也是零2.连续条件(1)挠度连续条件(2)转角连续条件3.感悟弯矩为零处转角取极值;转角为零处,挠度取极值【更加简单的是从挠度曲线上来判读】4.事实上:在简支梁中, 不论集中载荷作用于什么位置, 其最大挠度值一般都可用梁跨中点处的挠度值来代替, 精确度能够满足工程要求.技巧:(a )对各段梁,都是由坐标原点到所研究截面之间的梁段上的外力来写弯矩方程的.所以后一段梁的弯矩方程包含前一段梁的弯矩方程.只增加了(x-a)的项. 对于见对方对于简支梁的来说;中间作用一个集中力的话,要是判断那一段的挠度和转角的话,1 比较a 和b 的值,谁大挠度最大值就在那一侧;因为转角是在弯矩等于零的地方,所以可以知道转角一定会在 角支座处可能取得2比较集中力作用点的转角值得正负也可以判断6--4用叠加法求弯曲变形载荷叠加法和结构叠加法(逐段钢化法)在简支梁的一段作用的非集中载荷时候;要用积分的方法;取一小段dx 算出这一点的集度,再用第九栏的公式计算0)(a x M -+对于外伸梁一般用逐段钢化法;一般分为简支梁和固定端约束的梁;支点的简化时候有力和力偶两个(弯矩)[刚体作用时候是力可以平移的]剪力直接传递到支座上不引起变形6.5简单超静定梁独立平衡方程的数目的确定n次超静定梁寻求变形协调方程的关键是找到挠度的连接点6.6减小弯曲变形的一些措施改善机构的形式和载荷的作用方式,减小弯矩缩小跨度选择合适的截面形状工字形,等离对称轴较远的面例题中引入的是简支梁的三角形载荷;首先将载荷无限分解特别注意此时叠加的时候是积分2.简支梁部分载荷作用下的(载荷分布点的挠度和两端的转角)方法二的简化简支梁集中力在中间的作用下视为固定端约束3.对于外伸梁的端口的挠度和转角方法是固定的,一般有两种分段求变形(在脚支座的地方简化成力和弯矩,查表得出挠度和转角的表达式。
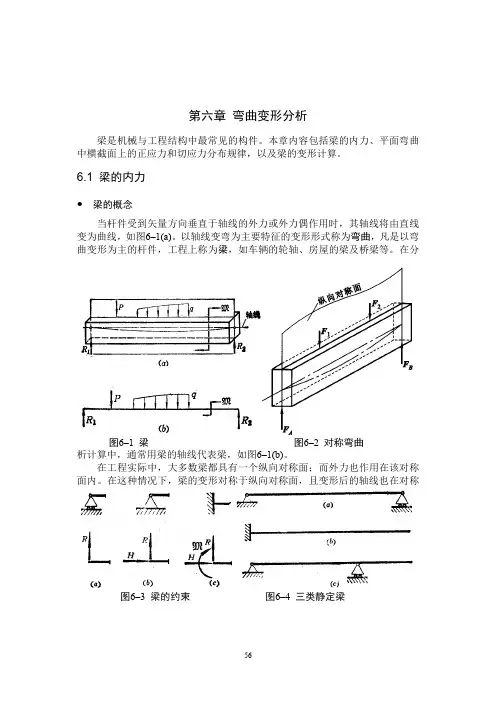
第六章 弯曲变形分析梁是机械与工程结构中最常见的构件。
本章内容包括梁的内力、平面弯曲中横截面上的正应力和切应力分布规律,以及梁的变形计算。
6.1 梁的内力● 梁的概念当杆件受到矢量方向垂直于轴线的外力或外力偶作用时,其轴线将由直线变为曲线,如图6–1(a)。
以轴线变弯为主要特征的变形形式称为弯曲,凡是以弯曲变形为主的杆件,工程上称为梁,如车辆的轮轴、房屋的梁及桥梁等。
在分析计算中,通常用梁的轴线代表梁,如图6–1(b)。
在工程实际中,大多数梁都具有一个纵向对称面;而外力也作用在该对称面内。
在这种情况下,梁的变形对称于纵向对称面,且变形后的轴线也在对称图6–1 梁 图6–2 对称弯曲图6–3 梁的约束 图6–4 三类静定梁面内,即所谓的对称弯曲,如图6–2。
它是弯曲问题中最基本、最常见的情况。
本章只讨论梁的对称弯曲。
图6–3表示了梁的三种常见约束形式及相应的约束力:可动铰支座(图6–3(a)),固定铰支座(图6–3(b))和(平面)固定端约束(图6–3(c))。
在以上三种约束方式下,有三种常见的梁形式,如图6–4所示。
图6–4(a)为简支梁,两端分别为固定铰支座和活动铰支座;图6–4(b)为悬臂梁,一端固定端约束,一端自由;图6–4(b)为外伸梁,它是具有一个或两个外伸部分的简支梁。
这三种梁都是静定梁。
作用在梁上的外载荷,常见的有集中力偶M (图6–5(a))、分布载荷q (图6–5(b))和集中力F (图6–5(c))。
在实际问题中,q 为常数的均布载荷较为常见。
● 梁的剪力与弯矩在4.2中已经介绍了求杆件内力的通用方法,即截面法。
具体到梁,其内力分量为剪力和弯矩,规定当剪力相对于横截面的转向为顺时针为正,使杆件发生上凹下凸的弯矩为正,如图4–5(b)和(c)。
例6–1:如图6–6所示悬臂梁,受均布载荷q ,在B 点处受矩为2qa M =的力偶作用,试绘梁的剪力图与弯矩图。
解:设固定端的约束力和约束力偶为C R 和C M ,则由平衡方程00=-=∑qa R F C y ,qa R C =05.102=--⋅=∑C C M qa qa a m ,221qa M C = 以杆件左端为坐标原点,以B 为分界面,将梁分为AB 和BC 两段。
第6章 弯曲变形习题解答6-1 用直接积分法求下列各梁的挠曲线方程和最大挠度。
梁的抗弯刚度EI 为已知。
(a )解:(1)弯矩方程 0≤ x ≤l+aM (x )=qlx -qx 2/2+q<x-l>2/2-ql 2/2(2)积分 EI θ (x )= qlx 2/2-qx 3/6+q<x-l>3/6-ql 2x /2+CEI ν(x )= qlx 3/6-qx 4/24+q<x-l>4/24-ql 2x 2/4+Cx+D (3)定常数x = 0 θ = 0 → C = 0 x = 0 ν= 0 → D = 0νmax =ν B =)341(84laEI ql +-(↓)(b )解:(1)支反力 F A = M o / l (↑), F C =-M o / l (↓) (2)弯矩方程 0≤ x ≤ 4l/3M (x )= M o x / l -M o <x-l> / l (3)积分EI θ (x )= M o x 2 / 2l - M o <x-l>2 /2 l +CEI ν(x )= M o x 3 / 6l - M o <x-l>3/6 l +C x+D (4)定常数x = 0 ν= 0 → D = 0x = l ν= 0 → C =-M o l /6νmax =ν B =EIl M o 62(↑)6-2 写出下列各梁的边界条件,并根据弯矩图和支座情况画出挠度曲线的大致形状。
解:x = 0 ν= 0 x = a ν= 0x = l ν= ∆k = M o / lk x = 3a ν= ∆l = Fa /2EA(b) ν(b) (a)x = 0 θ = 0 x = 0 ν= 0 x = 0 ν=0 x = 3a ν= 0x = 0 ν= 0 x = 0 ν= 0 , θ = 0x =2a ν=0 x = 2a ν= 06-3 用叠加法求下列各梁C 截面的挠度和B 截面的转角。
第六章 弹塑性平面问题任何一个弹塑性体实际上都是空间(三维)物体,且一般的载荷严格说来也是空间力系.因此,所有弹塑性力学问题实际上都是空间问题,即所有的力学量都是坐标),,(z y x 的函数。
但是,当所考察的物体(结构)及其所承受的载荷具有某些特点时,则可将它们近似地看作平面(二维)问题,即所有的力学量都是两个坐标(如y x ,)的函数,从而使问题得简化,且所得解答又具有工程所要求的精度。
由第二章知,弹塑性力学平面问题可分为平面应力问题和平面应变问题两种,本章主要讨论弹塑性平面问题求解的一般方法。
6.1 弹性平面问题的基本方程由第二章己经知道,两类平面问题的基本未知量虽然是完全相同的,但非零的应力分量、应变分量和位移分量不是完全相同的. 1。
1平衡方程无论是平面应力问题还是平面应变问题,由于在z 方向自成平衡,因此,两类问题的平衡方程均为⎪⎪⎭⎪⎪⎬⎫=+∂∂+∂∂=+∂∂+∂∂00Y y x X y x yxy xyx σττσ (6。
1-1)1.2几何方程由于只需要考虑面内的几何关系,因此,对于两类平面向题均有 xvy u ,yv ,xuxy y x ∂∂+∂∂=∂∂=∂∂=γεε (6。
1—2)由式(6。
1-2)可得到平面问题的变形协调方程为y x xy xyy x ∂∂∂=∂∂+∂∂γεε22222 (6.1—3) 1。
3本构关系两类平面问题的非零应力分量和应变分量不相同,因此,由广义虎克定律所得本构方程也必然不尽相同.(1) 平面应力问题对于平面应力问题,因,0=z σ 0==zx yz ττ,根据广义虎克定律显然有0==zx yz γγ。
因此本构方程为⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫+=+-=-=-=xy xy y x z x y y y x x E EE Eτνγσσνενσσενσσε)1(2)()(1)(1 (6.1-4a)或⎪⎪⎪⎭⎪⎪⎪⎬⎫+=+-=+-=xyxy x y y y x x E E E γντνεενσνεενσ)1(2)(1)(122(6。