几大主流开源飞控平台优劣比较
- 格式:doc
- 大小:29.50 KB
- 文档页数:3

单价999元 姿态稳定,高度锁定支持6轴及以下多轴飞行器,不支持8轴及自定义安装方向确定,安装位置固定提供LED指示灯支持多种遥控器,可进行遥控器校准两种控制模式 — 手动模式、姿态模式自驾参数可调试两轴云台增稳 失控保护,遥控器回中自稳,超时自动降落电压保护电压一级保护为LED闪灯报警二级为自动降落D-Bus, 支持S-Bus 支持远程调参 启动方式同WK-M 支持参数导入导出支持在线升级单价1999一体设计,6轴陀螺仪组合器件独立电源模块大疆第四代全新姿态算法支持九种不同机型(八轴不支持大震动机架)多种飞行模式自行切换(只有三种)gps模块精度《2.5米,高低《0.8米智能方向控制失控保护,低电压保护掰杆启动及掰杆停止模式 四通道和四通道以上的接收机均可支持iosd(航拍时显示姿态)Zenmuse GoPro云台(控制俯仰2轴云台)蓝牙调参单价5999功能在大风环境下的精确定位悬停增稳达到一个更高的境界热点环绕功能遥控器触发自动返航功能免费激活单点地面站增加对PPM接收机的支持云台舵机输出频率范围:400hz,200hz,100hz和50hz 云台舵机横滚与俯仰限位放宽至90°gps模块精度《2.5米,高低《0.8米面向商用及工业用多旋翼平台的飞控系统扩展功能大疆对所有接口封装,只能换自己的配件不适合开发,适合商业运行支持市面上最常见的第三方电调单价1200(自己的代码,不存在侵权问题)功能15种飞行模式多种翼型(各种多旋翼,包括大震动八轴)和车辆控制支持市面上所有常见电调gps模块精度《1.0米,高低《0.5米(优化的双GPS差分定位法)全新的姿态算法wookong-m 我们开发的开源飞控naza-m lite 功能扩展功能naza-m v2功能扩展功能整合型 3 轴角速度和 3 轴加速度传感器气压传感器光流传感器(室内飞行定位)自主设计的超低功耗无线收发模块优化的强大的地面站功能,摆脱遥控束缚,电脑鼠标控制飞行轨迹四通道和四通道以上的接收机均可支持可脱离摇控飞行最多可支持256个航点扩展功能支持市面上3轴云台航拍功能(飞行超稳定)apk安卓手机控制,强于大疆的地面站D飞行,一键返航,定点、定高飞行,绕点飞行,执行巡航任务,自动导航,精确定位,低电压自动返航,遥控器失效保护,自航,遥控器失效保护,自动降落,跟随飞行(使用者携带gps设备)等。
Pixhawk和Paparazzi从入门到精通:开源飞控概述概述无人机是无人驾驶飞机的简称(Unmanned Aerial Vehicle,UAV),是利用无线电遥控设备和自备的程序控制装置的不载人飞机,包括无人直升机、固定翼机、多旋翼飞行器、无人飞艇、无人伞翼机。
广义地看也包括临近空间飞行器(20-100 公里空域),如平流层飞艇、高空气球、太阳能无人机等。
从某种角度来看,无人机可以在无人驾驶的条件下完成复杂空中飞行任务和各种负载任务,可以被看做是“空中机器人”。
飞控系统是无人机完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的核心系统,飞控对于无人机相当于驾驶员对于有人机的作用,我们认为是无人机最核心的技术之一。
飞控一般包括传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。
飞控按照是否公开源代码的方式分为开源飞控和商品飞控:(1)开源飞控世界各地的精英本着开源的精神,将所做的无人机工作开源开放,主要有MicroCopter, Paparazzi, AutoQuad, OpenPilot,MWC,KK, APM,PX4....MicroCopter, Paparazzi算是飞控开源的开山鼻祖,尤其Paparazzi以算法强大和稳定性著称,其下面也有很多版本,MCU采用ST和NXP的方案。
用户最多的应算APM,在经历基于Arduino的发展后,现在已经逐步过渡到PX4/Pixhawk平台,采用双ST MCU、冗余电源及传感器的方案,以满足未来更苛刻的需求和功能。
(2)商品飞控国外没有找到什么有名的商品飞控,国内到是有一堆,比如大疆的、极飞、零度、亿航....扒开外壳看下,大疆采用NXP方案(可以类比Paparazzi),极飞ST,零度有个AT91+FPGA,亿航(呵呵,似乎是APM,只是不公开),都可以从开源飞控找到他们影子,只要商品飞控有的功能,开源飞控都有,但是开源飞控有的功能,商品不一定有,那么商品飞控有什么特点呢?1)加了一个漂亮的外壳,尤其是铝合金的;2)加了个优化算法,比如大疆似乎有个H∞;3)简化了调参和线束。

云平台开源云平台5大优劣势分析
QuinStreet;Chris Preimesberger;范平
【期刊名称】《通讯世界》
【年(卷),期】2012(000)008
【摘要】开源云系统部署只是近几年兴起来的事物,还没有很.多用户案例,对于企业来说这些开源系统技术是否已经准备就绪?近几个月来,Rackspace/NASA、HP、VMware、Citrix都极力响应开源云计算倡议,使得开源云计算框架得到显著发展。
这些主要厂商都在持续构建各自的公有云基础设施,与目前的云服务商巨头AWS(Amazon Web Services)展开生死角逐。
【总页数】1页(P48)
【作者】QuinStreet;Chris Preimesberger;范平
【作者单位】
【正文语种】中文
【相关文献】
1.利用教学资源搭建开源云平台 [J], 刘毅
2.OpenStack开源云平台主模块的架构分析 [J], 张进铎;毛承国;李硕;张卫华;马迅飞
3.比拼:细数四大开源云平台优势 [J], 孙杰贤
4.OpenStack开源云平台主模块的架构 [J], 张海涛;
5.基于OpenStack开源云平台搭建学校教学私有云的研究与实现 [J], 杨秀芳因版权原因,仅展示原文概要,查看原文内容请购买。

最流行的十大开源云监控工具Linux系统在企业中的应用程度已经非常广泛,人们听到过太多关于Docker和Kubernetes的消息,以至于忘记了监控和日志记录也是同样重要的任务。
Docker延续开展,随之而来的是围绕它构建的效劳生态系统的成长。
虽然部署系统主要涉及在系统内运行单个应用程序或效劳,但随着部署规模越来越大,不仅仅是在操作系统或应用程序级别,了解环境状态和运行状况也变得越来越重要。
监控和测试工具分为实时数据库、数据采集工具、可视化工具、意见反应工具、日志记录器等等。
在过去的几年里,开源产品和商业监控应用程序发生了爆炸式增长,下面是其中10个X的开源云监控工具。
PrometheusPrometheus是一个开源云监控解决方案,它可以处理时间序列监控等问题。
它是CNCF支持的9个工程之一,也是继Kubernetes之后由CNCF主办的第二个工程。
因为谷歌、CoreOS、RedHat、IBM等厂商的支持,使得Prometheus 成为监控云应用程序的首选。
Prometheus最初是由音乐网站SoundCloud开发的,现在已经成为Docker生态系统中不可或缺的方案CoreOS团队也在积极使用Prometheus来改良Kubernetes的性能。
Prometheus已经开展成为一种先进的系统警报和监视工具包,能够监视包含系统、Hadoop集群、言语运行,以及Python、Go等应用程序堆栈。
很多人将它与Graphite(见下文)进行比拟。
简而言之,Prometheus是一个开源监控系统、时间序列数据库和完成代码的框架。
但是Prometheus不会生成指标,企业必须让它能够通过以一种能够理解的言语使指标可用。
GraphiteGraphite是一种流行的开源工具,可以构建基于web的用于监视和分析的仪表板。
它最初是由Orbitz的Chris Davis在十多年前创立和设计,用于监视和绘制计算机系统的性能。
开源飞控知多少所谓开源飞控就是建立在开源思想基础上的飞行自主控制器项目(Open Source AutoPilot),同时包含开源软件和开源硬件,而软件则包含飞控硬件中的固件和地面站软件。
一开源飞控发展第一代开源飞控系统使用Arduino或其他类似开源电子平台为基础,扩展连接各种MEMS传感器,能够让无人机能平稳地飞起来。
主要特点是模块化和可扩展能力。
第二代开源飞控系统大多拥有自己的开源硬件、开发环境和社区,采用全集成的硬件架构。
主要特点是高度集成、高可靠,其功能已经接近商业自动驾驶仪第三代开源飞控系统将会在软件、人工智能以及云应用方面进行革新。
加入集群飞行、图像识别、自主避障、自动跟踪飞行等高级飞行功能,向机器视觉、集群化、开发过程平台化的方向发展。
二开源飞控介绍Arduino飞控Arduino 是最早的开源飞控,由Massimo Banzi、David Cuartielles、Tom Igoe、Gianluca Martino、David Mellis 和Nicholas Zambetti于2005年在意大利交互设计学院合作开发而成。
Arduino公司首先为电子开发爱好者搭建了一个灵活的开源硬件平台和开发环境,用户可以从Arduino官方网站取得硬件的设计文档,调整电路板及元件,以符合自己实际设计的需要。
Arduino可以通过与其配套的Arduino IDE软件查看源代码并上传自己编写的代码,Arduino IDE使用的是基于C语言和C++的Arduino语言,十分容易掌握,并且Arduino IDE可以在Windows、Macintosh OSX和Linux三大主流操作系统上运行。
随着该平台逐渐被爱好者所接受,各种功能的电子扩展模块层出不穷,其中最为复杂的便是集成了MEMS传感器的飞行控制器。
为了得到更好的飞控设计源代码,Arduino公司决定开放其飞控源代码,他们开启了开源飞控的发展道路。
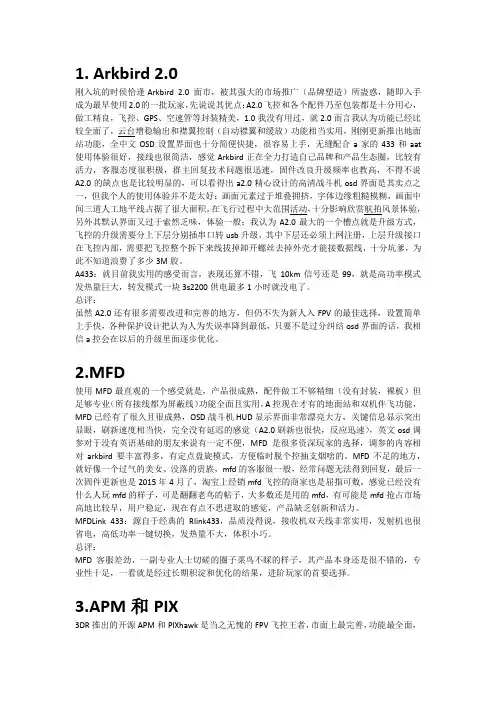
1. Arkbird2.0刚入坑的时侯恰逢Arkbird 2.0 面市,被其强大的市场推广(品牌塑造)所蛊惑,随即入手成为最早使用2.0的一批玩家,先说说其优点:A2.0飞控和各个配件乃至包装都是十分用心,做工精良,飞控、GPS、空速管等封装精美,1.0我没有用过,就2.0而言我认为功能已经比较全面了,云台增稳输出和襟翼控制(自动襟翼和缓放)功能相当实用,刚刚更新推出地面站功能,全中文OSD设置界面也十分简便快捷,很容易上手,无缝配合a家的433和aat 使用体验很好,接线也很简洁,感觉Arkbird正在全力打造自己品牌和产品生态圈,比较有活力,客服态度很积极,群主回复技术问题很迅速,固件改良升级频率也教高,不得不说A2.0的缺点也是比较明显的,可以看得出a2.0精心设计的高清战斗机osd界面是其卖点之一,但我个人的使用体验并不是太好:画面元素过于堆叠拥挤,字体边缘粗糙模糊,画面中间三道人工地平线占据了很大面积,在飞行过程中大范围活动,十分影响欣赏航拍风景体验,另外其默认界面又过于索然乏味,体验一般;我认为A2.0最大的一个槽点就是升级方式,飞控的升级需要分上下层分别插串口转usb升级,其中下层还必须上网注册,上层升级接口在飞控内部,需要把飞控整个拆下来线拔掉卸开螺丝去掉外壳才能接数据线,十分坑爹,为此不知道浪费了多少3M胶。
A433:就目前我实用的感受而言,表现还算不错,飞10km信号还是99,就是高功率模式发热量巨大,转发模式一块3s2200供电最多1小时就没电了。
总评:虽然A2.0还有很多需要改进和完善的地方,但仍不失为新人入FPV的最佳选择,设置简单上手快,各种保护设计把认为人为失误率降到最低,只要不是过分纠结osd界面的话,我相信a控会在以后的升级里面逐步优化。
2.MFD使用MFD最直观的一个感受就是,产品很成熟,配件做工不够精细(没有封装,裸板)但足够专业(所有接线都为屏蔽线)功能全面且实用,A控现在才有的地面站和双机伴飞功能,MFD已经有了很久且很成熟,OSD战斗机HUD显示界面非常漂亮大方,关键信息显示突出显眼,刷新速度相当快,完全没有延迟的感觉(A2.0刷新也很快,反应迅速),英文osd调参对于没有英语基础的朋友来说有一定不便,MFD是很多资深玩家的选择,调参的内容相对arkbird要丰富得多,有定点盘旋模式,方便临时脱个控抽支烟啥的。
四轴飞控总结详尽的介绍各种飞控来源及硬件资源核心部分四轴飞控总结详尽的介绍各种飞控来源及硬件资源核心部分从团队选择无人机项目开始,我的前期工作就是了解现在市场上所有的飞控以及功能,为接下来的无人机飞控打下基础。
现在市场上的飞控种类很多,常见的有MK、KK、KK flycam、EAGLE N6、玉兔飞控、FF、WKM、FC1212-S、MWC、FY等等,国内也是有越来越多的团队开始研究四轴飞控,其中很多属于山寨。
MK是德国的开源项目,但一般价格较贵,整个一套估计要1000多,且对模友的基础要求较高,玩的人不是很多。
KK是法国的开源项目,国内许多团队利用其开源的特点,将硬件电路和程序照搬过来然后在市场上卖,竞争比较激烈,因此价格很便宜,贵一点的也就100多便宜的只要60左右,目前最新版本是KK5.5,与其他飞控相比,KK飞控只有一个低端的陀螺仪而且不含加速度计,因此不能实现自稳,但价格低廉是其最大的优势,而且支持固定翼模式,很多模友在玩。
KK flycam是韩国的模友在KK的基础上开发的,添加了加速度计,用了更好一点的陀螺仪,因此能实现自稳,价格为145美元,目前国内卖得一般是其山寨版本,功能差不多,只有280左右。
EAGLE N6是国内一个团队刚刚研发的,使用的AVR单片机且效果很不错,支持8种飞行模式,每次启动只需要将拨码开关拨至指定模式就完成了模式的切换,且其288元的价格得到了很多模友的追捧,美中不足的是其没有加速度计,不能实现自稳,航拍性能不好。
/item.htm?id=12801941326玉兔飞控也是近期比较热门的一种飞控,由国外模友研发,采用ARM处理器,售价为288元,性价比较高。
功能特点:•主处理器,ARM32位,主频50MHZ•可以支持140g的mini小4轴,要知道小4轴比大4轴更“贼”哦。
•板载高精度数字3轴陀螺仪和3轴加速度计,实现自动稳定和自动平衡。
•8路接收通道,除了主要的4个摇杆通道外,还可以定义辅助开关通道或云台控制通道。


国内外⽐较好的⼏款飞控系统介绍和性能配置国内外⼏款⽐较好的飞控产品(1)零度智控的YS09飞控套件主要参数:开发板硬件资源介绍电源芯⽚LM2596-5,允许输⼊7~20V电压,为电路板提供稳定5V;LM2677,为舵机、接收机提供6V电压,统⼀供电。
中央处理器CPU ATMEL公司的AT91RM9200,⼯业级,主频200MHZ。
外部动态存储器1⽚SDRAM,HY57V641620E。
FLASH 1⽚512K的DATAFLASH;可扩充32M的FLASH,RC28F320J3C-125。
串⼝4个全双⼯串⼝,包含1个DBG⼝。
调试及下载接⼝⼀个标准10芯JTAG⼝。
FPGA ALTERA公司的CYCLONE系列EP1C3T100。
LED指⽰灯两个贴⽚LED,可由程序及FPGA代码控制点亮与熄灭。
GPS模块UBLOX的LEA-4S,⽀持4HZ刷新率。
压⼒计集成IMU 两个MS5534A⽓压传感器,数字SPI总线,精度0.1mba,可获得⽓压⾼度与空速。
Analog Devices公司新推出的3轴加速度计与3轴陀螺仪集成器件ADIS16355,IMU整体解决⽅案,消除正交误差。
电压转换芯⽚⼀⽚AD7998,8个独⽴通道,12位转换精度,TWI总线。
其它留有系统扩展接⼝,输出到舵机的信号全部由驱动芯⽚74LVC16245进⾏了隔离。
图13 YS09飞控正视图图14 YS09飞控后视图(2)北京普洛特⽆⼈飞⾏器科技有限公司的UP30/40飞控系统UP30性能参数:集成3轴MEMS加速度计、速率陀螺,GPS,空速传感器,及更⾼精度的全数字⽓压⾼度计供电范围扩展为4~26V,很多电动飞机的动⼒电可以直接给其供电体积相对UP20更⼩巧,仅为40X100X12mm3,重量26g外部接⼝和任务功能灵活且可以定制可内置3轴电⼦罗盘,⽀持3轴云台控制具备GPS/INS惯性导航功能,满⾜在丢星情况下返回起飞点舵机扩展到10~24个,分别可以执⾏飞⾏控制和其他任务⽀持国产低速通讯电台(最低波特率⾄1200bps),使得通讯距离更远、更可靠、误码率更低2~6个10位AD,1路16位AD,充分满⾜任务数据采集需求⼤⽓数据探测能⼒,可以观测⼤⽓温压湿,以及风向风速具备UP20所具备的定时定距以及定点的航拍功能具备2路转速监测,特别适合于双发动机的⽆⼈机、⽆⼈飞艇的转速监测新的电⽓停车功能⽀持除了原来的磁电机发动机(如⼩松系列),还⽀持CDI点⽕的发动机(如3w等)⽀持全⾃动伞降;可连接超声波⾼度传感器实现全⾃动的滑跑降落,只需要在地⾯站上指定降落点与⽅向以及左右盘旋,飞控⾃动推算下滑航线。

【北航无人驾驶飞行器设计研究所】开源飞控知多少随着科技的进步,无人机走进普通大众生活只是时间问题。
然而,一直困扰着无人机发展的关键设备就是自动驾驶仪。
随着开源飞控的发展,这个问题得到了突破性的解决,为无人机产品的进一步民用化奠定了基础。
李大伟北京航空航天大学无人驾驶飞行器设计研究所副教授杨炯北京航空航天大学无人驾驶飞行器设计研究所工程师在纷繁复杂的无人机产品中,四旋翼飞行器以其结构简单、使用方便、成本低廉等优势,最先进入了大众的视线。
但是,这种飞行器对飞行控制能力的要求是最高的,因此它刺激了大批基于MEMS传感器的开源飞控的出现。
1 如何定义开源开源(Open Source)的概念最早被应用于开源软件,开放源代码促进会(Open Source Initiative)用其描述那些源码可以被公众使用的软件,并且此软件的使用、修改和发行也不受许可证的限制。
每一个开源项目均拥有自己的论坛,由团队或个人进行管理,论坛定期发布开源代码,而对此感兴趣的程序员都可以下载这些代码,并对其进行修改,然后上传自己的成果,管理者从众多的修改中选择合适的代码改进程序并再次发布新版本。
如此循环,形成“共同开发、共同分享”的良性循环。
开源软件的发展逐渐与硬件相结合,产生了开源硬件。
开源硬件的原则声明和定义是开源硬件协会(Open Source HardWare Association,OSHWA)的委员会及其工作组,以及其他更多的人员共同完成的。
硬件与软件不同之处是实物资源应该始终致力于创造实物商品。
因此,生产在开源硬件(OSHW)许可下的品目(产品)的人和公司有义务明确该产品没有在原设计者核准前被生产,销售和授权,并且没有使用任何原设计者拥有的商标。
硬件设计的源代码的特定格式可以被其他人获取,以方便对其进行修改。
在实现技术自由的同时,开源硬件提供知识共享并鼓励硬件设计开放交流贸易。
开源硬件(OSHW)定义 1.0是在软件开源定义基础上定义的。
(增加U22)浅析Arkbird、MFD、APM、Pix飞控优缺点本帖最后由小艺的忆于 2016-7-28 09:38 编辑入FPV坑已经有一段时间了,抱着新人对一切充满好奇的心态,已经分别使用过Arkbird、MFD(果子)、APM、Pix等飞控,已经对各飞控平台有了一定了解,现在在此根据个人经验分享一下使用体验,大家多多交流,老鸟勿喷。
1. Arkbird2.0刚入坑的时侯恰逢Arkbird 2.0 面市,被其强大的市场推广(品牌塑造)所蛊惑,随即入手成为最早使用2.0的一批玩家,先说说其优点:A2.0飞控和各个配件乃至包装都是十分用心,做工精良,飞控、GPS、空速管等封装精美,1.0我没有用过,就2.0而言我认为功能已经比较全面了,云台增稳输出和襟翼控制(自动襟翼和缓放)功能相当实用,刚刚更新推出地面站功能,全中文OSD设置界面也十分简便快捷,很容易上手,无缝配合a家的433和aat使用体验很好,接线也很简洁,感觉Arkbird正在全力打造自己品牌和产品生态圈,比较有活力,客服态度很积极,群主回复技术问题很迅速,固件改良升级频率也教高,不得不说A2.0的缺点也是比较明显的,可以看得出a2.0精心设计的高清战斗机osd界面是其卖点之一,但我个人的使用体验并不是太好:画面元素过于堆叠拥挤,字体边缘粗糙模糊,画面中间三道人工地平线占据了很大面积,在飞行过程中大范围活动,十分影响欣赏航拍风景体验,另外其默认界面又过于索然乏味,体验一般;我认为A2.0最大的一个槽点就是升级方式,飞控的升级需要分上下层分别插串口转usb升级,其中下层还必须上网注册,上层升级接口在飞控内部,需要把飞控整个拆下来线拔掉卸开螺丝去掉外壳才能接数据线,十分坑爹,为此不知道浪费了多少3M胶。
A433:就目前我实用的感受而言,表现还算不错,飞10km信号还是99,就是高功率模式发热量巨大,转发模式一块3s2200供电最多1小时就没电了。
就我拥有的四轴飞控做⼀个⽐较(KK、MWC、⽟兔、FF)我之前从未飞过直机,先后飞过的四轴飞控有KK、⽼乔牌MWC、⽟兔、FF,现在就这四款飞控作⼀下个⼈的使⽤测评。
KK是我⼊门四轴的第⼀块飞控,可以这么说,⾃从MR将KK的暴利打成了原形,才有了今天多旋翼的如此流⾏。
我先后⼀共拥有过六块KK,第⼀块KK是168元买的散件,后来承蒙某商家搞活动,送了我5⽚KK的PCB空板,我⾃购元件,焊出了五板:em00: 。
KK的使⽤确实⽐较简单,调试也⾮常简便,这才让我对四轴彻底的⼊了迷,但KK由于没有⾃稳功能,导致了多次在飞远后或有风天因为看不清姿态⽽炸机收场。
初飞KK时,我创下了⼀块电池的飞⾏内炸了⼋⽀桨的纪录,⼀个星期炸了100元的时候的1045正反桨还很贵,⼀⽀5块5,炸起来真是⾁痛:em17: 。
后来⼊了LAMA桨,炸桨再也不⼼痛了。
还引领了⼀次LAMA桨的风潮,导致淘宝上的某商家⼀天销售LAMA桨数千⽀的热潮:em15:的总结是:便宜、调试简单、升级固件⽅便、⽀持单轴到N轴的飞⾏模式,但功能⽐较少,是带领⼴⼤模友⼊门四轴的功⾂。
并且始终感觉KK是练技术的第⼀选择。
对KK的总结后来⼊⼿了⽼乔的MWC飞控,第⼀次体会到了⾃稳的乐趣,只要⼀松杆,飞机马上就能恢复到⽔平状态,感觉真是太爽了,也体会到了罗盘的作⽤,只要罗盘⼀开,⽅向就能锁得死死的,但⽓压定⾼,感觉从来没有⽣效过,感觉应该是定⾼的算不过MWC的调试确实很难,有时候不怎么调,都能好飞得不得了,有时候却会很难飞,所幸的是,⽼乔的售后做的⾮常好,经常半夜帮我远程调机,并且⽼乔也有详细的教程。
但估计由于MWC的作者是国外的,有时很难正确理解到MWC原作者件的PID也没有⼀个很好的理解,我们的意见也⽆法得到作者的⽀持。
后来MWC也有了CF功能,由于我的飞控寄回给⽼乔升级了,现在新的机架还没有,⼀直没有真正的体会过。
对MWC总结总结:调试⽐较⿇烦,调试好了,⾮常好飞;英⽂好的模友,可以看看官⽹,可能会有⽐较⼤的收获;⽓压定⾼效果⼀般;⽼乔的服务很好;那份教程是⽬前见过最详细的。
四大主要开源云平台对比摘要:据悉,天云趋势在中国市场的CloudStack商用成功案例已经超过10家,用户类型包括电信运营商、大型企业、软件园区和政府机构等。
尽管OpenStack和CloudStack的较量聚集了太多关注的目光,但这一市场还有其他重要的参与者。
相比影响力相对有限的oVirt,Eucalyptus和OpenNebula是两个不可被忽视的开源云平台项目。
目前,这两个项目也拥有自己的生态系统,以及忠实的开发者群体。
对中国企业而言尤为重要的是,Eucalyptus和OpenNebula在中国市场均拥有重量级的企业用户。
笔者特别对目前四大主要开源云平台进行了对比,具体如附表所示(以开源项目名称为序)。
从大学研究项目发源的Eucalyptus具有浓厚的研究风格,在开发者中拥有较高的知名度。
Eucalyptus系统公司现任CEO为MySQL前任 CEO Marten Mickos,其管理团队对开放源代码项目拥有丰富的管理和运营经验。
Eucalyptus的生态圈聚拢了包括戴尔、惠普、Intel、NetApp、 Novell、红帽、VMware在内的重量级厂商。
在其网站提供的客户列表中,索尼、Puma、趋势科技、Infosys等知名国际化企业,以及中国工商银行、中国镇江市政府名列其中。
OpenNebula则拥有温和、优雅的欧洲基因。
它是由欧洲研究学会发起的虚拟基础设备和云端运算的计划。
该项目在2005年启动,2008年年初发布首个开放源代码版本。
OpenNebula的支持厂商和用户主要在欧洲,其在中国拥有两个重量级的用户。
中国移动研究院的“大云”和中国科学院的“凌云” 项目均基于OpenNebula开源框架构建。
虽然各具特色并拥有重量级的粉丝,但不得不承认,Eucalyptus和OpenNebula 开源社区的规模无法与OpenStack的高人气相比。
CloudStack从GPL转向Apache 之后,其社区活跃度快速攀升,成为企业用户和开发者在OpenStack之外重点考察的选项。
【工具篇】7款最佳开源运维监控软件!对于企业而言,保证服务器的安全性是非常重要的一项工具,因为服务器是确保网站、业务正常运行的关键,所以做好监控防御工作是十分必要的。
在这种情况下,好用的运维监控软件是必不可少的,它是提高我们工作效率的重中之重,那么好用的运维监控软件有哪些?本文为大家介绍常用的7款最佳开源运维监控软件!第一个:NagiosNagios成立于1999年,是提供从小型到企业级基础设施的监控解决方案的行业领导者之一。
Nagios能够监控几乎所有类型的组件,如网络协议、操作系统、系统指标、应用程序、服务、Web服务器、网站、中间件等。
Nagios在Core4监控引擎上运行,该引擎通过消耗更少的服务器资源来提供高水平的性能。
你可以利用Nagios来监控WebLogic、WebSphere、JBoss等。
第二个:ZabbixZabbix是一款出色的企业级软件,旨在监控从服务器、网络设备到Web应用程序和数据库的性能和可用性的一切。
Zabbix被全球数千家公司使用,包括DELL、Salesforce、ICANN、Orange等。
第三个:CheckmkCheckmk是一个高度可扩展的工具,可监控服务器、网络、云资产、数据库、容器、物联网等。
它有两种模式可用。
基础版,完全开源并提供免费和无限制的监控;企业版,附带附加功能。
第四个:CactiCacti是另一个可以安装在Linux或Windows操作系统上的开源网络监控工具。
它连接到RRD T ool,可以生成与相关网络数据的图表。
第五个:OpenNMSOpenNMS可以使用JMX、WMI、SNMP、NRPE、XML HTTP、JDBC、XML、JSON等收集系统指标。
可以发现网络中的第二层网络拓扑。
它建立在事件驱动的架构之上,并支持Grafana。
OpenNMS内置了报表,这意味着您可以在漂亮的仪表板和图表中查看报告。
总的来说,OpenNMS有一个出色的用户界面。
⼏个基于STM32的开源⽆⼈机飞控1、OpenPilotOpenPilot是⼀个开源的⽤于飞机模型的⽆⼈驾驶飞⾏器项⽬,最初由David Ankers、Angus Peart和Vassilis Varveropoulos于2009年创⽴,旨在⽀持多旋翼以及固定翼的飞机,提供强⼤稳定的⽆⼈驾驶平台。
OpenPilot通过社区的⼒量发展起来的,开发者可以通过此平台学习⼩型的⽆⼈机技术。
OpenPilot软件是基于GPLv3许可协议的。
OpenPilot当前有两个硬件平台:CopterControl 和 Revolution。
OpenPilot Revolution具有完整的板上惯性系统单元,⽽CopterControl板带有3轴陀螺仪和加速度计。
CopterControl 可以扩展不同传感器和通讯系统。
CopterControl是第⼀代板⼦,后因陀螺仪问题修改为CC3D板⼦,Atom是最新的版本,功能完全兼容CC3D,但尺⼨⼩了。
OpenPilot OpenControl微控制器STM32F103CBT6传感器Analog Devices ADXL345 AccelInvensense IDG-500 XY Axis GyroInvensense ISZ-500 Z Axis GyroOpenPilot - /OpenControl 3D/Atom微控制器:STM32F103CBT6传感器:Invensense MPU-3/6000, 3-axis Gyros & Accel on 6000Revolution微控制器:STM32F405RGT6, ARM Cortex-M4 内核@210MIPS调制解调器:采⽤了433MHz品牌/OPlink Modem。
OPLinkMINI采⽤STM32F103CBT6传感器:3 Axis Gyro3 Axis Accelerometer3 Axis MagnetometerBarometric pressure sensor参考资料2、PX4 autopilotPX4是⼀个独⽴的开源软件、开源硬件的开源项⽬,⽬的在于为学术、爱好和⼯业团体提供⼀款低成本⾼性能的⾼端的⾃动驾驶仪。