多站无源雷达系统作战效能研究与应用
- 格式:pdf
- 大小:288.97 KB
- 文档页数:4
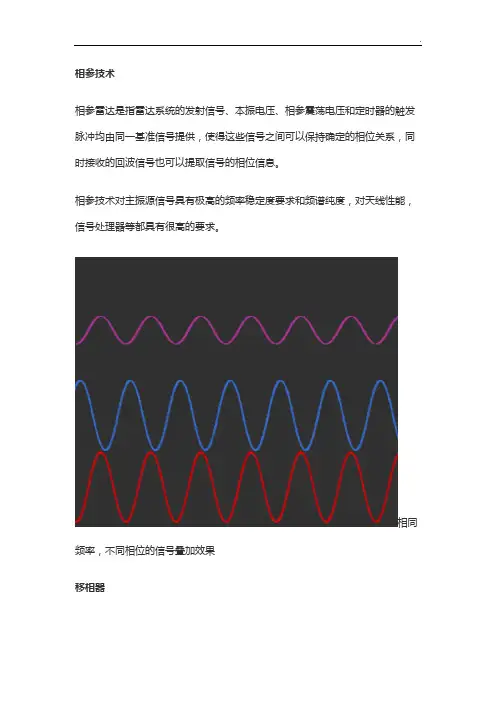
相参技术相参雷达是指雷达系统的发射信号、本振电压、相参震荡电压和定时器的触发脉冲均由同一基准信号提供,使得这些信号之间可以保持确定的相位关系,同时接收的回波信号也可以提取信号的相位信息。
相参技术对主振源信号具有极高的频率稳定度要求和频谱纯度,对天线性能,信号处理器等都具有很高的要求。
相同频率,不同相位的信号叠加效果移相器移相器的作用是将信号的相位移动一个角度,相位和频率保持稳定的对应关系是移相器的一个重要特性。
铁氧体移相器铁氧体移相器的基本原理是利用外加直流磁场改变波导内铁氧体的导磁系数,从而改变电磁波的相速,得到不同的相移量。
铁氧体移相器的主要优点是承受功率较高,插入损耗较小,带宽较宽。
其缺点是所需激励功率比PIN管移相器大,开关时间在微秒(us)量级。
半导体PIN二极管PIN二极管开关从“开”到“关”或者相反动作的起始状态达到稳定状态的时间称为开关时间。
以半导体PIN二极管作为开关器件的数字式移相器相位转换时间可以达到纳秒(ns)量级。
GaAs FETGaAs FET开关是数控移相器的主要构成元素,它作为一个三端器件,可以通过对栅偏置电压的控制来改变源漏间电阻,从而实现开关动作,转换时间也在纳秒(ns)量级。
相控阵雷达原理有了信号叠加的原理和移相器,相控阵雷达原理就好理解了,其基本思想:通过移相器改变每个辐射元件发射信号的相位,以提供相长/相消干涉,从而实现波束的电子扫描,在期望的方向上形成窄波束,雷达天线不需要机械转动。
电子扫描阵列很好的解决了机械雷达的机械惯性和扫描需要时间长等问题,实现了波束指向的无惯性快速扫描,为任务的灵活敏捷性创造了很好的条件。
相控阵天线是相控阵雷达组成的核心之一,相控阵天线既有有源、无源之分,也有一维、二维之分。
无源电子扫描阵列Passive Electronically Scanned Array, PESA无源电子扫描阵列天线表面的阵元只有改变信号相位的能力而没有发射信号的能力,信号的产生还是依靠天线后方的信号产生器,然后利用波导管将产生的信号号送到信号放大器上,再传送到阵列单元上面,接收时则反向而行。
基于双基地距离的多站多外辐射源无源定位算法赵勇胜;赵拥军;赵闯【摘要】针对利用多个外辐射源和多个接收站的无源雷达目标定位场景,提出了一种利用三步加权最小二乘的双基地距离(Bistatic Range,BR)定位问题代数解.首先,在第一步加权最小二乘估计中,通过引入多个辅助参数,将BR观测方程线性化,并得到目标位置粗估计;在后两步加权最小二乘估计中利用辅助参数与目标位置参数的约束关系来提高目标位置的估计精度.对算法理论误差分析表明,其定位精度可以达到克拉美罗界.蒙特卡罗仿真结果表明,算法的定位精度优于现有算法.【期刊名称】《电子学报》【年(卷),期】2018(046)012【总页数】8页(P2840-2847)【关键词】无源定位;多站多外辐射源;双基地距离;加权最小二乘【作者】赵勇胜;赵拥军;赵闯【作者单位】解放军信息工程大学导航与空天目标工程学院,河南郑州450001;解放军信息工程大学导航与空天目标工程学院,河南郑州450001;解放军信息工程大学导航与空天目标工程学院,河南郑州450001【正文语种】中文【中图分类】TN9711 引言无源雷达作为一种特殊的双基地雷达,其利用环境中的民用或商用辐射源作为机会照射源来探测和定位目标[1,2].由于其具有的隐蔽性高、覆盖性好、操作和维护成本低、不占用频谱资源等优点,近年来在军用和民用领域均引起了学者的广泛兴趣[3,4].无源雷达的显著特点是其配置了两条接收通道,其中一条为参考通道,用于接收来自外辐射源的直达波信号,另一条为目标监视通道,用于接收经目标反射后的回波信号.参考通道和目标监视通道中信号的到达时差(Time Difference Of Arrival,TDOA),可以用于估计目标位置[5].在无源定位中,TDOA通常转化为双基地距离(Bistatic Range,BR),其定义为外辐射源至目标的距离与目标至接收站的距离之和[6].对于辐射源定位问题,TDOA转化为了距离差(Range Difference,RD)测量,在几何上RD测量确定一双曲线(面)[7],而在无源定位中,BR测量确定了一个椭圆(球),其焦点为分别为外辐射源和接收站.各个BR测量值对应的椭圆(球)的交点,即为目标位置[6].目前,基于RD的辐射源定位问题得到了广泛研究,并已经发展出了多种算法[8~15].而对于基于BR的目标定位问题,还缺少系统的研究,目前对其研究主要集中在一些特殊的简化场景,如多站单外辐射源场景[16,17]、单站多外辐射源场景[6,18~20]等.对于多站多外辐射源定位场景,其挑战性和难度更大.但近年来,随着BR定位问题受到日益重视,已经有一些文献针对多站多外辐射源场景下的BR 定位问题进行了研究.文献[21]选取部分BR观测,并将其转化为RD测量,而后利用最小二乘(Least Squares,LS)方法求解.但文献[16]分析表明,RD定位的定位精度低于BR定位.文献[22]提出了一种基于加权最小二乘(Weighted Least Squares,WLS)的BR定位算法,其通过引入辅助参数,将对应某一外辐射源的BR 观测线性化,而后扩展至多个外辐射源,实现了对系统整体观测方程的线性化,然后利用WLS算法得到目标位置估计.但文献[22]忽略了目标位置与辅助参数之间的约束关系,因此其算法并非最优.文献[23]提出了一种基于分组的两步加权最小二乘(Group-2WLS)算法,其在将BR观测方程线性化并得到目标粗估计的基础上,利用目标位置参数与辅助参数之间的约束关系进一步提高目标位置的估计精度.然而,文献[23]为了减小求解难度,采取了分组优化的方式得到的目标位置的最终估计,但这种分组进行估计的处理方式理论上并非最优.文献[24]提出了一种无需分组的三步加权最小二乘(Three-Step WLS,3WLS)算法,其在第一步完成BR方程线性化及粗估计的基础上,在后续两步WLS处理中,利用第一步WLS估计中辅助参数的估计值来提高目标位置的估计精度.但文献[24]中算法仅利用了辅助参数的估计值,而忽略了对目标位置粗估计值的利用,因此,文献[24]中算法亦非最优. 本文针对利用多个外辐射源和多个接收站的无源雷达目标定位场景,借鉴RD定位问题中经典的两步加权最小二乘算法,在文献[24]中3WLS算法的基础上进行改进,得到了一种新的BR定位问题代数解.与文献[24]相比,本文算法在第二步WLS处理中,同时利用了第一步WLS中目标位置和辅助参数的估计值,因此定位精度更高.最后通过仿真实验验证算法的优越性.2 定位场景本文考虑如下的二维定位场景(可直接扩展至三维):假设场景中有M个外辐射源和N个接收站,其位置分别已知为和目标位置x=[x,y]T为待估参量.那么,目标到外辐射源m的距离为(1)目标到接收站n的距离为(2)外辐射源m到接收站n的距离为(3)假设信号传播速度为c,那么外辐射源m的直达波信号与其经过目标反射后的回波信号到达接收站n的时差为(4)在无源定位中,为便于算法描述,通常将时差转化为双基地距离.那么根据双基地距离的定义,对应于外辐射源m和接收站n的双基地距离为考虑到实际中存在的测量误差,得到双基地距离的观测方程为(5)式中,em,n(m=1,2,…,M,n=1,2,…,N)为双基地距离的观测误差,这里假设其服从零均值的高斯分布,其协方差矩阵为Q.显然,对于本文M个外辐射源和N个接收站,共可获得MN个双基地距离的观测方程.本文的主要目的就是要通过测量对应不同外辐射源-接收站的MN个双基地距离,来估计出目标位置.3 定位算法3.1 第1步WLS估计求解式(5)的主要困难在于其非线性.为实现BR观测方程的线性化,首先将式(5)中移项至等式左侧,得(6)将式(6)两边平方,并忽略其中的二阶误差项,得将式(7)按照外辐射源分组,那么其中对应外辐射源m和接收站1,2,…,N的表达式可表示为如下矩阵形式Amφm=bm+εm(8)式中,(9)εm为由于BR测量误差而导致的等式(8)的误差.在忽略了二阶误差项后,其可以表示为(10)其中,em=[em,1,em,2,…,em,N]T.那么,将式(8)扩展至M个外辐射源,得G1θ1=h1+Δh1(11)式中,(12)(13)为式(11)的误差向量,其同样可以表示为关于目标位置的函数:Δh1=B1e(14)式中,(15)通过引入辅助参数观测方程被转化为了关于θ1的线性方程.假设向量θ1中辅助参数与目标位置参数无关,则可以得到θ1的加权最小二乘解为(16)式中,W1为加权矩阵.根据加权最小二乘理论,其最优选取为(17)从式(17)可以看出,W1的计算需要未知的目标位置真实值.因此,在计算过程中,首先令W1=Q-1,计算θ1,而后利用θ1中目标位置估计构建更加准确的W1,然后用W1得到更加准确的θ1.根据加权最小二乘理论,θ1的估计误差协方差矩阵(18)3.2 第2步WLS估计然而,式(16)中θ1的加权最小二乘解是在忽略了式(11)中辅助参数与目标位置参数的约束关系的前提下得到的,所以其并非目标位置的最优解.为此,在第2步WLS估计中,利用辅助参数与目标位置参数的约束关系来构建方程,从而提高目标位置的估计精度.将约束关系两边平方,并移项整理,得(19)考虑到的估计误差,将代入式(19)中,并忽略其中的二阶误差项,得(20)根据Chan和Ho的两步加权最小二乘思想[9],目标位置估计除应满足式(20)中的约束关系外,还应满足因此,令θ2=[x,y,ρ]T,其中ρ=x2+y2,则可以构建如下线性方程G2θ2=h2+Δh2(21)式中,(22)Δh2为方程式(21)两边的误差:(23)注意到,与文献[24]中的3WLS算法相比,本文式(21)中增加了对θ1中x、y估计值的利用,因此,本文算法的定位精度更高.式(21)的加权最小二乘解为(24)式中,W2为加权矩阵,其最优选取为(25)根据加权最小二乘理论,θ2的估计误差协方差矩阵为(26)3.3 第3步WLS估计式(24)虽然消除了辅助参数但θ2中却同时引入了另外的辅助参数ρ.显然,θ2中ρ和x,y是相关的,因此式(24)的结果同样并非最优.为此,在第3步中,利用θ2中辅助参数ρ与目标位置x,y的约束关系来构建方程,从而进一步提高目标位置的估计精度.考虑的估计误差,则由ρ=x2+y2可得:G3θ3=h3+Δh3(27)式中,(28)式(27)的加权最小二乘解为(29)式中,W3为加权矩阵,其最优选取为(30)根据加权最小二乘理论,θ3的估计误差协方差矩阵(31)对式(29)中中的元素进行开方运算,即可得到目标位置估计.(32)式中,其目的是为了消除开方运算过程中出现了正负符号模糊的情况.4 误差分析本节推导算法的理论误差,并将其与CRLB对比,以分析算法的理论性能.假设目标位置的估计误差为Δx,那么根据式(28)中θ3的定义可得:(33)式中,B4=2diag(x,y).将式(33)乘以其转置,并求期望,可得:(34)进一步地,将式(31)、(30)、(26)、(25)、(18)、(17),依次代入式(34)中,可得(35)式中,将式(35)与文献[24]中目标位置估计的CRLB进行比较,可以发现二者相同.也就是说,本文算法的理论误差可以达到CRLB.5 仿真实验本节通过仿真实验评估算法的定位性能.仿真实验场景设计如下:2维场景中有4个外辐射源,5个接收站,其位置如表1所示.双基地距离的测量误差设置为服从零均值的高斯分布,其协方差矩阵为Q=σ2R,其中矩阵R的主对角线上元素为1,其余为0.5.算法的定位误差为3000次蒙特卡洛仿真的均方根误差(Root Mean Square Error,RMSE)和偏差(Bias),其定义如下:(37)(38)式中,‖·‖2为2-范数,K为蒙特卡洛仿真次数,为在第k次蒙特卡洛仿真中目标位置的估计值.表1 外辐射源和接收站的位置(单位:km)Rx no.nxrnyrn Tx no.mxtmytm 100110025027730530104-504-7750-5仿真1 算法对近场和远场目标的定位精度首先,为了突出本文算法的定位性能,在不同测量误差条件下,利用本文算法进行仿真定位实验,统计算法的均方根误差和偏差,并将其与1WLS算法[22]、Group-2WLS算法[23],3WLS算法[24]及CRLB对比.如图1所示,目标位置设置为近场和远场两种情况:近场目标位置为[5,5]Tkm;远场目标位置为[50,50]Tkm.仿真结果如图2和图3所示.图2(a)给出了BR测量误差为1m~104m时,算法对近场目标定位的均方根误差情况.可以看出,显然文献[22]中的1WLS算法达不到CRLB,这是由于其忽略了对辅助参数与目标位置之间约束关系的利用.文献[23]的Group-2WLS算法和文献[24]的3WLS算法的定位精度相当,且在测量误差较小时,定位误差接近CRLB,但从局部放大图可以看出,二者其实并没有达到CRLB.相比之下,仅有本文算法的定位精度达到了CRLB,且在测量误差较大时,偏离CRLB的程度相对其它几种算法较小.图2(b)给出了几种算法的偏差比较情况,可以看出,本文算法的偏差最低,Group-2WLS算法和3WLS算法的偏差相当,而1WLS算法的偏差最大.此外,由于BR定位问题的非线性原因,以上几种算法的偏差均随着测量误差的增加而增大.图3给出了算法对远场目标定位的均方根误差和偏差情况.可以看出,算法同样表现出了优于其它三种算法的定位性能.在测量误差较小时,仅本文算法可以达到CRLB.Group-2WLS算法无法达到CRLB的原因在于其分组优化的方式导致其无法达到全局最优解.文献[24]的3WLS算法无法达到CRLB的原因在于其在第二步WLS中仅利用了第一步WLS估计中辅助参数估计,而忽略了对目标位置粗估计值的利用,导致了第二步WLS中有用信息的丢失和方程数量的减少,从而降低了定位精度.与近场目标相比,相同的测量误差条件下,算法对远场目标的定位误差较大.仿真2 布站数量对算法定位精度的影响仿真1中只分析了一种布站方式下算法对远近目标的定位,接下来给出另一种布站方式下算法的定位性能,并分析布站数量对目标定位精度的影响.定位场景如图4所示:利用接收站Rx1、Rx2和外辐射源Tx1、Tx2、Tx3,对位于[5,5]Tkm处的目标进行定位.仿真结果如图5所示.图5给出了改变布站方式后,算法对目标定位的均方根误差和偏差情况.可以看出,改变布站方式后,本文算法的定位RMSE和偏差仍然是几种算法中最低的.布站方式2与布站方式1相比,主要是布站数量的减少.对比图5和图2可以明显看出,减少外辐射源和接收站的数量后,系统的定位精度显著下降.仿真3 算法对运动目标的跟踪定位性能分析下面分析算法在一段时间内对运动目标的持续跟踪定位效果.假设目标的初始位置为[50,50]Tkm,以速度[-500,-500]Tm/s运动,测量误差σ=102m,利用仿真1中的布站方式,每1秒对目标进行1次定位.不同算法对目标的跟踪定位性能如图6所示.从图6(a)可以看出,算法对运动目标位置的估计逼近其真实轨迹.图6(b)统计并比较了几种算法的估计误差,从中可以直观地看出,本文算法的估计误差要明显小于其余三种算法,并且随着目标靠近接收站,几种算法的定位精度均显著增加,这与仿真1中远近目标定位性能的比较结果一致.仿真4 GDOP分析系统几何精度因子(Geometric Dilution Of Precision,GDOP)也是衡量系统定位性能的重要指标,其定义为(39)式中tr(·)表示矩阵的迹,cov(x)如式(35)所示.为分析目标位置对系统估计精度的影响,画出了不同目标位置上的GDOP等高线图,如图7所示.图7给出了测量误差分别为σ=10m和σ=103m时算法的GDOP图.可以看出,两种测量误差条件下,算法的定位误差分布具有相似的规律,即在外辐射源和接收站所在的近场区域,定位精度最高,而随着目标远离,定位精度逐渐降低.这与仿真1中近场和远场目标的定位误差的比较情况是一致的.仿真5 计算运算量分析以上仿真实验给出了与多种现有方法在精度方面的比较,接下来,通过统计以上这些算法运行中的乘法次数,来比较算法的运算量.外辐射源和接收站位置等实验参数与仿真1相同.算法运算量比较的结果如表2所示.表2 算法运算量比较算法运算量运算量比1WLSO{Np(2M2N2(M+2)+2MN(M+2)2+(M+2)3) +MN(M+2))} 1.000Group-2WLSO{NpM(6N2+21N+27)+82M+8} 0.1973WLSO{Np(2M2N2(M+2)+2MN(M+2)2+(M+2)3 +MN(M+2))+6M2+21M+101} 1.021Proposed methodO{Np(2M2N2(M+2) +2MN(M+2)2+(M+2)3 +MN(M+2))+6(M+2)2+21(M+2)+101} 1.033表2给出了本文算法与现有多种算法的运算量比较情况,其中,Np为第一步WLS估计中加权矩阵的迭代次数,这里统一设置为2.可以看出,Group-2WLS算法的运算量最低,本文算法与1WLS、3WLS算法相比,运算量略有增加,但差异并不明显.而考虑到本文算法在定位精度方面的提升,这种程度的运算量增加是值得的.6 结束语本文研究了多站多外辐射源场景下基于双基地距离的目标定位问题,借鉴辐射源定位问题中经典的两步加权最小二乘思想,提出了一种新的三步加权最小二乘定位算法.本文算法具有如下优势:(1)算法针对的是多站多外辐射源场景,对于单站多外辐射源场景和多站单外辐射源场景同样适用,具有较高的通用性.(2)作为一种代数解算法,本文算法无需初始值和迭代,避免了迭代类算法的局部收敛问题.(3)与文献[24]中的三步加权最小二乘算法相比,本文算法增加了对目标位置粗估计值的利用,因此定位精度更高.(4)仿真实验表明,算法的定位性能优于现有算法,在测量误差较小时,定位精度可以达到CRLB.参考文献【相关文献】[1] 高志文,陶然.外辐射源雷达的相干积累增益计算及性能分析[J].电子学报,2008,36(6):1227-1230. Gao Zhi-wen,Tao putation and analysis of coherent accumulation gain forpassive radar[J].Acta Electronica Sinica,2008,36(6):1227-1230.(in Chinese).[2] Michael E,Alexander S,Fabienne M.Design and performance evaluation of a matureFM/DAB/DVB-T multi-illuminator passive radar system[J].IET Radar,Sonar and Navigation,2014,8(2):114-122.[3] Higgins T,Webster T,Mokole E L.Passive multistatic radar experiment using WiMAX signals of opportunity.Part 1:Signal processing[J].IET Radar Sonar andNavigation,2016,10(2):238-247.[4] 唐波,程水英,张浩.外辐射源雷达模糊函数副峰抑制算法研究[J].电子学报,2015,43(6):1058-1064. Tang Bo,Cheng Shui-ying,Zhang Hao.Ambiguity function side peaks suppression for passive radar[J].Acta Electronica Sinica,2015,43(6):1058-1064.(in Chinese).[5] Daun M,Nickel U,Koch W.Tracking in multistatic passive radar systems usingDAB/DVB-T illumination[J].Signal Processing,2012,92(6):1365-1386.[6] Malanowski M,Kulpa K.Two methods for target localization in multistatic passiveradar[J].IEEE Transactions on Aerospace & Electronic Systems,2012,48(1):572-580.[7] 陈永光,李昌锦,李修和.三站时差定位的精度分析与推算模型[J].电子学报,2004,32(9):1452-1455. Chen Yong-guang,Li Chang-jin,Li Xiu-he.A precision analyzing & reckoning model in tri-station TDOA location[J].Acta Electronica Sinica,2004,32(9):1452-1455.(in Chinese).[8] Smith J O,Abel J S.Closed-form least-squares source location estimation from range-difference measurements[J].IEEE Transactions on Acoustics Speech & Signal Processing,1988,35(12):1661-1669.[9] Chan Y T,Ho K C.A simple and efficient estimator for hyperbolic location[J].IEEE Transactions on Signal Processing,1994,42(8):1905-1915.[10] Huang Y,Benesty J,Elko G W,et al.Real-time passive source localization:a practical linear-correction least-squares approach[J].IEEE Transactions on Speech & Audio Processing,2001,9(8):943-956.[11] Beck A,Stoica P,Li J.Exact andapproximate solutions of source localizationproblems[J].IEEE Transactions on Signal Processing,2008,56(5):1770-1778.[12] Lui K W K,Chan F K W,So H C.Semidefinite programming approach for range-difference based source localization[J].Signal Processing IEEE Transactionson,2009,57(4):1630-1633.[13] Yang K,An J,Bu X,et al.Constrained total least-squares location algorithm using time-difference-of-arrival measurements[J].IEEE Transactions on VehicularTechnology,2010,59(3):1558-1562.[14] 王鼎,张瑞杰,吴瑛.无源定位观测方程的两类伪线性化方法及渐近最优闭式解[J].电子学报,2015,43(4):722-729.Wang Ding,Zhang Rui-jie,Wu Ying.Two pseudo-linearization processing methods and the asymptotically optimal closed-form solutions for passive location[J].Acta ElectronicaSinica,2015,43(4):722-729.(in Chinese).[15] 朱国辉,冯大政,聂卫科.传感器位置误差情况下基于多维标度分析的时差定位算法[J].电子学报,2016,44(1):21-26.Zhu Guo-hui,Feng Da-zheng,Nie Wei-ke.Multidimendional scaling based TDOA localization algorithm with sensor location errors[J].Acta Electronica Sinica,2016,44(1):21-26.(in Chinese).[16] Noroozi A,Sebt M parison between range-difference-based and bistatic-range-based localization in multistatic passive radar[A].International Radar Symposium (IRS)[C].Dresden,Germany:IEEE,2015.1058-1063.[17] Rui L,Ho K C.Elliptic localization:performance study and optimum receiver placement[J].IEEE Transactions on Signal Processing,2014,62(18):4673-4687.[18] Li W,Wei P,Xiao X.A robust TDOA-based location method and its performance analysis[J].Science in China Series F:Information Sciences,2009,52(5):876-882.[19] Anastasio V,Farina A,Colone F,et al.Cramer-Rao lower bound with Pd<1 for target localisation accuracy in multistatic passive radar[J].IET Radar,Sonar andNavigation,2014,8(7):767-775.[20] Chalise B K,Zhang Y D,Amin M G,et al.Target localization in a multi-static passive radar system through convex optimization[J].Signal Processing,2014,102(9):207-215. [21] Dianat M,Taban M R,Dianat J,et al.Target localization using least squares estimation for MIMO radars with widely separated antennas[J].IEEE Transactions on Aerospace & Electronic Systems,2013,49(4):2730-2741.[22] Noroozi A,Sebt M A.Target localization from bistatic range measurements in multi-transmitter multi-receiver passive radar[J].IEEE Signal Processing Letters,2015,22(12):2445-2449.[23] Einemo M,So H C.Weighted least squares algorithm for target localization in distributed MIMO radar[J].Signal Process,2015,115(C):144-150.[24] Park C,Chang J.Closed-form localization for distributed MIMO radar systems using time delay measurements[J].IEEE Transactions on WirelessCommunications,2016,15(2):1480-1490.。
无源雷达无源雷达是一种利用接收机接收自然环境中已存在的电磁波信号进行目标检测的雷达系统。
与传统基于发射机发射电磁波的有源雷达不同,无源雷达通过提取和分析自然电磁波信号来实现对目标的探测。
无源雷达具有以下优势:不需要自身发射电磁波,因此不易被敌方探测;隐蔽性高,减少了电磁辐射对环境和人体的影响;功耗低,延长了系统的使用寿命;并且成本较低,易于大规模部署。
在无源雷达系统中,接收机是核心组件。
接收机的任务是将接收到的自然电磁波信号进行放大、混频、滤波等处理,以获取目标的相关信息。
接收机通常包括前端接收机和信号处理单元两个部分。
前端接收机负责接收和放大电磁波信号,采用高灵敏度的天线和低噪声放大器,并能适应不同频率范围的电磁波信号。
信号处理单元则对接收到的信号进行频谱分析、信号识别和目标特征提取等操作,以实现目标检测和跟踪。
相比于有源雷达,无源雷达在目标检测方面具有一些独特的挑战。
首先是信噪比问题。
自然电磁波信号通常非常微弱,受到地球大气、电离层、人造电磁波等干扰,信噪比较低。
因此,在无源雷达中,提高信噪比是一个重要的技术难题。
其次是目标分辨问题。
由于无源雷达无法控制电磁波的波束形状和辐射方向,因此难以实现对目标的精确定位和形状分辨。
这就需要通过复杂的信号处理算法和模型来提高目标识别和分类的准确性。
无源雷达的应用领域非常广泛。
军事领域中,无源雷达可以用于实现对潜艇、舰船和飞机等目标的隐蔽性侦测和追踪;国土安全领域中,无源雷达可以用于边境监控和防卫系统的建设;民用领域中,无源雷达可以用于气象监测、地震预警和无人驾驶等应用。
近年来,随着无源雷达技术的不断发展,越来越多的应用领域开始关注并采用无源雷达技术。
为了进一步提高无源雷达的性能和应用领域,目前正在进行一些研究和发展工作。
其中包括对接收机的敏感度和动态范围的提升、信号处理算法的改进、目标特征提取方法的优化等。
此外,还有一些新型的无源雷达技术正在兴起,如基于光学波的无源雷达、基于声波的无源雷达等,这些新技术有望进一步推动无源雷达的发展。
Science and Technology &Innovation ┃科技与创新2021年第08期·47·文章编号:2095-6835(2021)08-0047-02提高雷达战场生存能力的方法研究王昫,冯顺平,张嘉祥,李铭伟(空军预警学院,湖北武汉430019)摘要:现代雷达面临着电子干扰、反辐射武器、隐身目标、低空突防等方面的威胁,雷达生存能力堪忧。
为提高雷达战场生存能力,主要从提高反侦察、抗干扰、抗摧毁、抗隐身目标、抗低空突防能力等方面入手展开研究,探讨提高雷达战场生存能力的方法策略。
关键词:雷达;侦察;干扰;反辐射中图分类号:E933文献标志码:ADOI :10.15913/ki.kjycx.2021.08.016随着各种电子武器装备的发展与运用,现代战场电磁环境呈现出复杂多变的趋势,加上电子侦察、电子干扰、火力摧毁、低空突防、隐身技术等手段的日益成熟,当前雷达目标的生存环境愈发恶劣。
如何提高雷达战场生存能力是当前该领域的重难点问题。
本文首先介绍了雷达战场生存能力的基本概念,分析了雷达存在的固有缺陷,然后总结了影响雷达生存的因素,最后从提高反侦察、反干扰、抗摧毁、抗隐身目标、抗低空突防能力五方面提出了相应的提高雷达生存能力的方法策略。
1雷达战场生存能力的概念及主要影响因素1.1雷达战场生存能力的基本概念雷达战场生存能力是指雷达系统在电子对抗、反对抗过程中能持续保持有效执行作战任务能力。
雷达战场生存能力是雷达系统在现代战争激烈对抗斗争环境中实战能力的概括反映[1]。
1.2影响雷达战场生存能力的主要因素自雷达问世以来,已经走过近一个世纪的发展。
现代雷达的各项技术已经趋于成熟,具有相当的先进性。
但由于雷达本身固有的一些特性,暴露出了其在战场的一些缺点,主要表现为以下几方面:①雷达主动发射电磁信号,易暴露自身;②雷达利用信号回波对目标进行探测,易受干扰;③与电子对抗相比,雷达探测距离更短;④雷达易受地杂波、天气等环境因素的影响。
多站纯方位无源定位算法研究进展一、本文概述随着现代战争环境的日趋复杂,对目标进行精确的无源定位已成为军事和民用领域的重要需求。
多站纯方位无源定位算法,作为一种不依赖于直接观测目标距离,仅通过多个观测站测得的目标方位角信息来确定目标位置的方法,近年来受到了广泛关注。
该方法具有隐蔽性好、抗干扰能力强、设备成本低等优点,在雷达、声呐、无线电侦测等领域具有广泛的应用前景。
本文旨在综述多站纯方位无源定位算法的研究进展,通过梳理国内外相关文献和研究成果,分析不同算法的原理、优缺点及适用范围,探讨算法性能评估方法和实际应用中的关键问题。
本文还将关注最新研究成果和技术趋势,为相关领域的研究人员和实践者提供有益的参考和启示。
本文首先简要介绍了无源定位技术的发展背景和纯方位定位的基本原理,然后重点分析了多站纯方位无源定位算法的主要研究内容和方法,包括基于几何关系的定位算法、基于优化理论的定位算法以及基于技术的定位算法等。
在此基础上,本文还将讨论算法性能评估的常用指标和方法,以及实际应用中需要解决的关键问题,如观测误差、多径效应、目标运动等。
通过本文的综述和分析,希望能够为相关领域的研究人员和实践者提供全面的信息和深入的理解,推动多站纯方位无源定位算法的研究和应用发展。
二、多站纯方位无源定位基本原理多站纯方位无源定位算法,是一种利用多个观测站对目标进行纯方位测量的定位方法。
所谓“纯方位”,指的是在定位过程中,仅利用目标相对于观测站的方向信息,而不依赖距离或其他类型的测量数据。
多站则指的是使用多个观测站对目标进行协同观测,以获取更全面、更精确的定位信息。
数据采集:各个观测站通过自身的传感器设备,如雷达、声呐等,捕获目标发出的信号或反射的信号,从而确定目标相对于观测站的方位角。
数据融合:各观测站将测得的方位角信息传输至数据处理中心,进行数据融合。
数据融合的目的是将多个观测站的信息结合起来,形成对目标位置的更全面、更准确的描述。
无源雷达的定位原理无源雷达是一种无需发射信号而能够获取目标位置的定位技术。
其原理是基于天线接收到目标发射的无线电波,通过信号处理和计算,可以计算出目标的位置和速度信息。
无源雷达主要由两个部分组成:接收天线和信号处理器。
接收天线会接收到目标发射的信号,并传送到信号处理器中进行处理分析。
信号处理器需要进行频谱分析、多普勒分析和时域分析等操作,对接收到的信号进行加工处理,通过多种算法计算出目标的距离、速度以及方位角等信息。
其中,频谱分析是无源雷达定位的关键技术之一。
通过对接收到的信号进行频谱分析,可以得到频域信息。
在接收目标信号时,无源雷达会接收到多种频率、不同相位和不同功率的信号,而这些信号都会对目标位置和速度的计算产生影响。
因此,无源雷达需要通过频谱分析和计算,识别出所有信号的信息,再进行处理后确定目标位置和速度。
另一个重要技术是多普勒分析。
当目标向雷达靠近或远离时,目标发射的信号会发生多普勒频移。
这种频移可以通过多普勒分析技术来计算出目标的速度信息。
同时,多普勒分析也可以用于识别并过滤掉各种杂波和背景噪声,从而提高雷达的定位精度。
总的来说,无源雷达的优点在于对空间目标主动隐蔽,无需信号发射,避免了被探测的风险。
但是也存在一些局限性,比如需要目标自发射信号,目标发射器的功率和发射方式需满足雷达系统的接收条件等。
此外,信号的识别和处理算法设计也是无源雷达技术发展的重要方向。
总之,无源雷达的定位原理是基于目标发射信号被接收后的信号处理和分析,识别出目标的位置、速度、方位角等信息。
该技术的优点在于能够有效隐蔽目标,但也有其局限性,需要继续进行相关技术研究和探索。
无源雷达的定位原理一、引言无源雷达是一种新兴的无线电定位技术,相比传统的有源雷达具有低成本、低功耗、方便部署的优势。
本文将详细介绍无源雷达的定位原理,包括工作原理、技术挑战以及应用场景等内容。
二、工作原理1. 无源雷达概述无源雷达基于接收来自目标的环境噪声信号,通过处理和分析这些信号来实现目标的定位。
无源雷达的核心思想是利用目标本身发射的信号或周围环境中的信号,而不是使用有源雷达一样的发射信号,从而实现定位。
2. 接收系统无源雷达的接收系统包括天线、前端放大器和信号处理器等组件。
天线用于接收环境噪声信号,并将其输入到前端放大器中。
前端放大器负责将接收到的微弱信号放大到能够被信号处理器处理的水平。
3. 信号处理器信号处理器是无源雷达的重要组成部分,其功能是对接收到的信号进行处理和分析,从而实现目标的定位。
信号处理器通常包括信号增强、时频分析、目标识别和定位等模块。
其中,时频分析模块用于提取信号的时延和频率特征,目标识别模块用于判断目标的类型,定位模块利用时延和频率特征计算目标的位置。
三、技术挑战1. 环境噪声由于无源雷达依赖接收环境噪声的特点,环境噪声的干扰成为技术挑战之一。
环境噪声来源复杂、幅度较小,如何在弱信号中提取出目标信号成为一个难题。
2. 目标识别无源雷达需要通过信号处理器对目标进行识别和分类,但不同目标的信号特征各异,如何准确地识别目标成为技术挑战。
3. 定位精度无源雷达的定位精度受到多种因素的影响,如环境噪声、信号功率和天线的角度等。
提高定位精度是无源雷达技术发展的关键挑战之一。
四、应用场景1. 航空领域无源雷达在航空领域中有广泛应用。
例如,无源雷达可以用于飞机的自主导航、空中交通管制和飞机的隐身技术等方面。
2. 智能交通无源雷达可以应用于智能交通系统中。
通过将无源雷达安装在红绿灯或者路边,可以实现对交通流量、车辆速度等信息的实时监测和分析。
3. 安防监控无源雷达在安防监控领域也有着重要应用。
无源相控阵雷达摘要:无源相控阵雷达是一种新型的雷达系统,它能够通过调控多个发射器和接收器之间的相位差,实现对目标的高精度定位和目标信号的波束形成。
本文将对无源相控阵雷达的原理、工作方式、优缺点和应用领域进行详细介绍,以及未来发展方向的展望。
一、引言无源相控阵雷达是一种无源无源线性阵列传感器系统,利用多通道接收并合成目标信号,能够实现目标的高精度定位和波束形成。
相比传统的有源雷达系统,无源相控阵雷达具有成本低、节省能源和具备隐蔽性等优势,目前在军事、航空航天和民用领域都具有广泛的应用前景。
二、原理介绍无源相控阵雷达利用多个发射器和接收器构成一个线性阵列,每个发射器和接收器之间的间距非常小,以达到对目标进行高分辨率扫描的目的。
当发射器发射波束,波束经过目标后会产生散射回波,这些回波信号会被接收器接收,并经过放大和处理后,通过相位控制电路,调整每个通道之间的相位差,以使回波信号形成一个合成波束。
通过改变发射器和接收器之间的相位差,可以实现波束的定位和波束的方向控制。
三、工作方式无源相控阵雷达的工作方式如下:1. 发射:发射器将雷达信号以波束形式发射出去,每个发射器发射的信号相互独立,且相位差不同。
2. 接收:接收器接收目标返回的回波信号,并经过放大和处理。
3. 相位差计算:利用相位控制电路,计算每个通道之间的相位差。
4. 波束形成:根据相位差的计算结果,将回波信号进行合成,形成一个合成波束。
5. 目标定位:利用合成波束的方向和强度信息,实现对目标的高精度定位。
四、优缺点无源相控阵雷达相比传统的有源雷达系统具有以下优点:1. 成本低:无源相控阵雷达不需要频率合成器和功率放大器等昂贵的组件,因此成本更低。
2. 节省能源:传统的有源雷达系统需要大量的能量来产生足够的发射功率,而无源相控阵雷达由于不需要发射器,因此能够节省大量的能源。
3. 隐蔽性:无源相控阵雷达没有发射器,避免了被敌方探测的风险,具备较高的隐蔽性。
海上目标无源态势感知技术试验研究
张财生;刘瑜;宋杰;孙顺;王聪;何友
【期刊名称】《现代雷达》
【年(卷),期】2024(46)2
【摘要】对海上目标全天时全天候的准确态势感知是维护国家海洋权益和保障海上安全的关键。
针对现有无线电侦测、光电探测等无源探测技术在探测目标类型和多目标探测能力方面和有源雷达在抗干扰和隐蔽性方面的局限,以海面上的各种船舶为目标,开展了基于脉冲雷达信号的海上目标无源感知技术试验研究,给出了无源态势感知系统探测目标的基本原理,结合外场实测数据完成了直达波脉冲信号参数的测量、天线扫描特性分析和数据预处理、脉冲积累与动目标显示处理、恒虚警检测和显示校正等方面的问题,并利用船舶自动识别系统信息对试验处理结果进行了检验分析,验证了基于脉冲雷达信号的海上目标无源态势感知技术的可行性和有效性。
【总页数】8页(P48-55)
【作者】张财生;刘瑜;宋杰;孙顺;王聪;何友
【作者单位】海军航空大学
【正文语种】中文
【中图分类】TN971
【相关文献】
1.针对GEO目标的美国天基态势感知技术发展研究
2.基于态势感知技术的智能电网网络态势评估模型及感知预测研究
3.多源融合的矿用电缆态势感知技术研究
4.空间目标态势感知及多源数据融合技术发展与应用
因版权原因,仅展示原文概要,查看原文内容请购买。
无源雷达的工作原理无源雷达是一种利用目标自身发出的信号进行探测和跟踪的雷达系统,与传统雷达系统不同,无源雷达不需要自身发射信号,而是通过接收目标本身发射的信号来实现对目标的侦察和识别。
无源雷达系统利用目标发射的电磁信号来进行目标定位和跟踪。
目标通常会发射具有一定频率和波形的电磁信号,这些信号可以是目标自身所产生的无线电频率或者是目标与环境相互作用所产生的信号。
无源雷达系统包括一个或多个接收天线和信号处理单元。
接收天线会接收到目标发射的信号,并将信号传输给信号处理单元进行处理。
信号处理单元对接收到的信号进行解调、滤波和放大等处理,以提取有用的目标信息。
通过分析和处理目标发射的信号,无源雷达系统可以获取目标的方位、距离、速度等信息。
无源雷达系统的工作原理可以通过多普勒效应来解释。
根据多普勒效应原理,当目标相对于雷达系统运动时,目标发射的信号会发生频率偏移。
这个频率偏移可以用来计算目标相对于雷达系统的速度。
通过分析接收到的信号的频率偏移,无源雷达系统可以获取目标的速度信息。
除了多普勒效应,无源雷达系统还可以利用目标的信号反射特性来进行目标定位和跟踪。
当目标发射的信号遇到环境中的障碍物或者其他目标时,信号将会发生反射。
通过接收和分析目标发射信号的反射信号,无源雷达系统可以确定目标的位置和方位。
无源雷达系统的优点在于其不需要自身发射信号,因此可以减小雷达系统的尺寸和功耗,同时也减少暴露在外界探测中的风险。
此外,无源雷达的工作原理使其在隐蔽性和隐身性方面具有一定的优势,因为无源雷达不会产生电磁辐射,很难被敌方的电子战干扰。
然而,无源雷达也存在一些限制。
首先,无源雷达系统需要目标发射特定频率和波形的信号,因此需要目标具备一定的电磁辐射能力。
其次,由于无源雷达系统依赖于目标的自身发射信号,因此其工作距离和侦测能力受到目标信号功率的限制。
此外,无源雷达在复杂的电磁环境中可能受到其他目标和干扰源的影响,从而导致目标定位和跟踪的误差。
一、电子对抗的简述1、电子对抗的定义为削弱、破坏敌方电子设备的使用效能,保障己方电子设备发挥效能而采用的综合技术措施,其实质是斗争双方利用电磁波的作用来争夺对电磁频谱的有效使用权,是现代战争中一种重要的作战手段。
由于军队广泛应用先进的电子技术和装备进行战场侦察、目标监视、作战指挥、通信联络、武器控制与制导,从而大大提高了作战能力和快速反应能力。
电子对抗的目的就在于:削弱或破坏敌方而同时又保护己方的这种能力,为掌握战场主动权,夺取战役、战斗的胜利创造有利条件。
有的国家称“电子战”或“电子斗争”。
电子对抗按其对象可分为通信对抗、导航对抗、雷达对抗、制导对抗、光电对抗、敌我识别对抗、无线电引信对抗、遥控遥测对抗等。
随着电子技术应用的扩展,新的对抗领域还会出现。
2、电子对抗的形式电子对抗主要包括电子对抗侦察、电子干扰和电子防御三个基本内容。
3、电子对抗的形成与发展电子对抗始于20世纪初无线电通信应用于军事斗争之后。
第一次世界大战中,交战双方曾用无线电通信设备侦收对方的信息和干扰对方通信联络。
第二次世界大战期间,电子对抗的领域、手段和规模都有了很大发展。
在通信对抗不断发展的同时,导航对抗出现,雷达对抗迅速兴起。
一些国家相继建立了电子对抗专业部队,研究发展了有源干扰技术和无源干扰技术,生产了数十种电子对抗设备和器材,并用于作战。
伴随着干扰技术的发展,各种相应的反干扰技术如改变频率、扩展频段、活动目标显示等也付诸使用。
英军在空袭汉堡时,苏军在斯大林格勒会战以及其他战役中,英、美联军在诺曼底登陆战役中,都成功地运用各种电子对抗手段,有效地保障了战役、战斗的顺利进行。
50年代中期以后,电子技术、航天技术、导弹技术飞速发展,特别是在越南、中东等局部战争中,各种战术导弹、制导炸弹和用雷达控制的火炮广泛应用,促进了电子对抗的全面发展。
电子对抗侦察活动自第二次世界大战结束以来,一直在不间断地进行着,电子侦察卫星、无人驾驶侦察飞机、投掷式电子侦察设备等多种侦察手段相继投入使用。