abaqus屈曲分析实例
- 格式:doc
- 大小:2.66 MB
- 文档页数:13
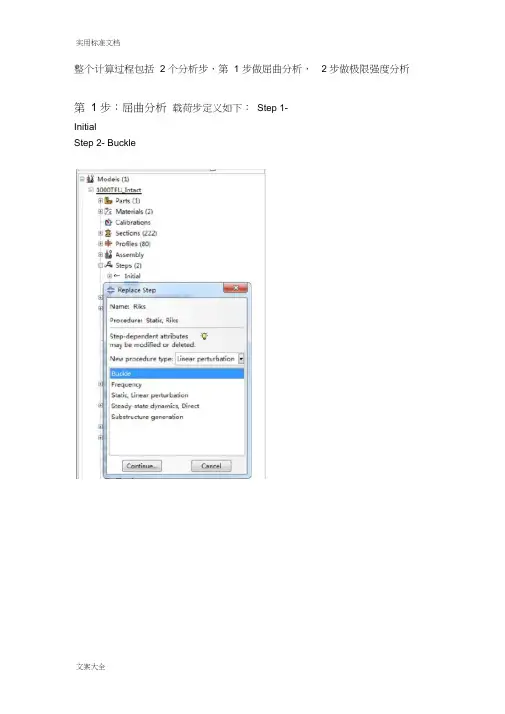
实用标准文档整个计算过程包括 2 个分析步,第 1 步做屈曲分析,第 1 步:屈曲分析载荷步定义如下:Step 1-InitialStep 2- Buckle2 步做极限强度分析0奪莖UWICWHIK . 叽I J I*' *iirl |U*ii:* ri«-2- c.仲[U**t Wfl| «R =・|0T* |«|M4 11 屮W Ml 町扌垮・3 4M4; *E>|轴亠白*wr»44* «*M *A*S MMM-in 4414-* Ita1! I >H*d *■.■ Lrfi|i-t*b*i UWi^ *4」>jU***^ ::切2冲<a:K-.L口sMwSniLpc^l Efl «o 誓光n-3 wa HF HB・・n c:^ > q士* f *B£ -A <MI '■■*W■uTp*』«MLrii4 *M;■pofit ■直j.i t…叫町■ ' H.,机...i . r |fl»-L , | |-£I -t fr E叶*盅1并在Model-Edit Keywords 的图中位置加入下面的文字,输出屈曲模态*nodefile, global=yesU,Create job 名称为“ Buckling点击continue ,完成第 1 步的计算第 2 步:极限强度分析将“ buckle ”分析步替换为“ riks ”分析步在Basic 选项卡中,Nlgeom:选择打开在Instrumentation 选项卡中,定义如下参数,然后点击OK Array定义一个新计算工作,输入名称,点击continue在Parallelization 选项卡,选择 2 个CPU,如下所示,点击OK。
在此编辑Model-edit keywords ,删除“第 1 步”加入的文字“ *nodefile, global=yesU,”,并在下图位置加入下段文字:*imperfection, file=buckling, step=1 1, 2.5点击OK,再保存文件最后提交计算。

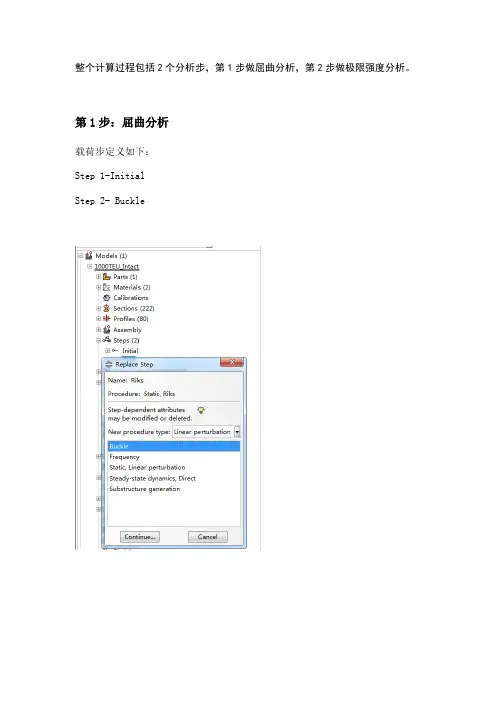
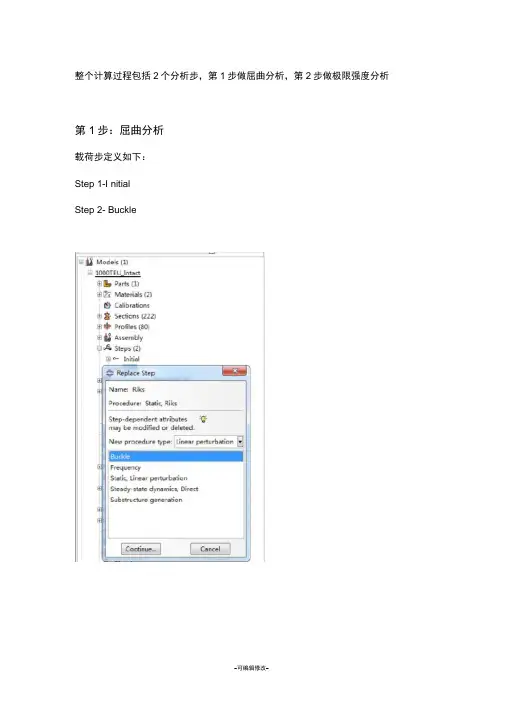
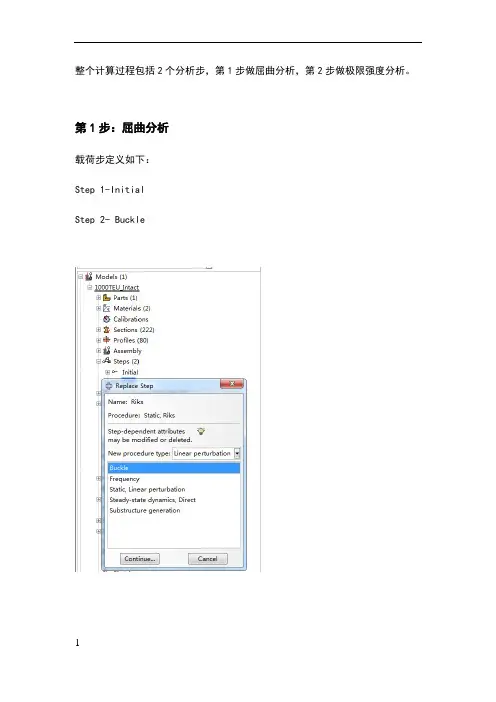
整个计算过程包括2个分析步,第1步做屈曲分析,第2步做极限强度分析。
第1步:屈曲分析载荷步定义如下:Step 1-InitialStep 2- Buckle并在Model-Edit Keywords的图中位置加入下面的文字,输出屈曲模态*nodefile, global=yesU,Create job 名称为“Buckling”点击continue,完成第1步的计算。
第2步:极限强度分析将“buckle”分析步替换为“riks”分析步在Basic选项卡中,Nlgeom:选择打开在Instrumentation选项卡中,定义如下参数,然后点击OK定义一个新计算工作,输入名称,点击continue在Parallelization选项卡,选择2个CPU,如下所示,点击OK。
在此编辑Model-edit keywords,删除“第1步”加入的文字“*nodefile, global=yesU,”,并在下图位置加入下段文字:*imperfection, file=buckling, step=11, 2.5点击OK,再保存文件。
最后提交计算。
提取计算结果进入visualization Module点击 Create XY data选择 ODB filed output,点击continuePosition选择 Unique Nodal, CF:point loads选择 CF2,再点击elements/nodes选项卡,选择跨中载荷加载点,最后点击save。
重复上一步操作,Position选择 Unique Nodal, U:spatial displacement 选择 U3,再点击elements/nodes选项卡,选择板格中心点,最后点击save。
点击Create XY data, 选择operate on XY data,点击continue选择Combine(X,X)命令,横坐标选择保存的displacement曲线,纵坐标选择保存的Point load曲线,点击最后一行Create XY Data与Save as。
ABAQUS非线性屈曲分析步骤分享:ABAQUS 非线性屈曲分析步骤来源:杨洋洋的日志riks法,或者general statics法(加阻尼),或者动力法一共三种方法,【问】在aba中能实现非线性屈曲分析吗?在step中选定line- perturbation下的各项,其Nlgeom都为Off,是不是意味着是进行不了啊?【答】line-perturbation应该是特征值屈曲分析,只能是线性的,要想进行非线性屈曲分析要引入初始缺陷ABAQUS中非线性屈曲分析采用riks算法实现,可以考虑材料非线性、几何非线性已经初始缺陷的影响。
其中,初始缺陷可以通过屈曲模态、振型以及一般节点位移来描述。
no.1: 利用abaqus进行屈曲分析,一般有两步,首先是特征值屈曲分析,此分析为线性屈曲分析,是在小变形的情况进行的,也即上面提到过的模态,目的是得出临界荷载(一般取一阶模态的eigenvalue乘以所设定的load),且需要在inp文件中,作如下修改*node file,global=yes*End Step此修改目的在于:在下一步后屈曲分析所需要的初始缺陷的节点输出为.fil文件。
no.2:其次,就是所谓的后屈曲分析,此步一般定义为非线性,原因在于是在大变形情况进行的,一般采用位移控制加修正的弧长法,可以定义材料非线性,以及几何非线性,加上初始确定,所以也称为非线性屈曲分析。
此步分析,为了得到极限值,需要得出荷载位移曲线的下降段,除了采用位移控制以及弧长法设定外,需在所得到的inp文件中,嵌入no.1中的.fil节点数据。
修改如下:*IMPERFECTION(缺陷), FILE=results_file(此文件名为.fil), STEP=step(特征值分析步名),1(模态),2e-3(模态的比例因子,此值一般取杆件的1%,壳体厚度1%)此修改一般加在boundary之后step之前。
Re:新手请教非线性屈曲中如何加初始扰动?6.2.4 Unstable collapse and postbuckling analysisRik法用于跳越失稳问题的研究,也可以用于分支屈曲的后屈曲研究。
整个计算过程包括2个分析步,第1步做屈曲分析,第2步做极限强度分析第1步:屈曲分析载荷步定义如下:Step 1-I nitialStep 2- Buckle]" BldMll% "Gfi hSM "Btifr女问g RM :L44Lai4Jlb L-l-SteJ SW34 to*- &mp»hjiv9匂Pl DjeMfi.c-5 ba^a bm "一 ~Z te -!^l -Si|| v*V* IA4W f*i <pd貝呎■吟1 和訐ym 印炖d FMffv 讹V 匚曲反..76^* + r 、::和A£T 巴:T=肛八FT •-百只“二o 土- .丫E案H IB ndi 4'B-rtBPCT14 FBW5^/W r«vfFK 口[• J甲■g CiM#»i4n M»oh totiG A g w^rirj出戶ii >W1MW4 >W#iTl4ChW曲比£丹71 怕iKSdUK«rtrin 导>F1MBB5M/WU ■T-**n *li«r I ll^hfli wThe jaj^.4toe 1 iibQL>j4| .h-2 內贞 J^r 11411 X>v m 均Lbit S KJ -1 Silled 3 EBri? pLufiE -汕 4 耳 D I si 泊■« 0TOD l&sm iy*i»Je !i?d bv 呵 ■怙O . -Ifcu 町临 Xrtpftii r* ihe 自他迈灯 曲妣仙哙 白jrttE The- K ^±L isi-SDfrse- :hs 当 be«i ami ID 'J T^*p AZLQIL L ISLCA :-se- 1 TT*s "4TAI1" Ikhli ^f4l :h-9 W IVAntJiB'^fl ■帀 *4111 h I 10 1 iw*AW^ihl f iwwl I riAFe -4B4B-A* 并在 Model-Edit Keywords*no defile, global=yesU,聞 孕 ”询詡 fit 审 0(*r T*$l< Ruy-hi 孑母 ¥*口占■❷建It 十亡叫乐口輯1 •占0 lb S3'Void««dm« : 9 弱 »W M I .CL I .yariUi b **TI 插 ■ FA VW MT * 心■l* 町 E 岂 Std* g .Flibi■ y g 村啤. J "oft Ia* It 迅Qg I 宝 H ET I UTT Uid^ut t3 *W *«iTfc- 弘 4f Mu»Fr ] n ★”■■也… 册 feMvidrttar M fLcmtad 诵 CcmdllMMik Id C-uffin.1! 9 Mid lx (■miitov'h 'ZfftHeur bet 卜 J £«4* rt. ■— -■-,N^nd. —$ 1 ■曹 e R 1 °IfMK nev *w 居 The Ji-^.4hje ] UDQL3-J4I .n-J 沖女 j'lir alCil J>v 切 xbc^- atjft glic 讯 试 Ebt* pCy fili TQ . . I xiid "d 耳Or Q -iOD Ififi in-u w UitiJfl sd K 说 TBP .亠I 汕 «l!fa frSMcj C* llw 冃论迈叩 xcmLDi 哙 nwi««tr :4=-L ftss t«e& xF w □ T -**p Ai&^ZL L IMA :-seii j * ■ih * i>¥ii "i4i ii -I -t>A4 TYE 巾尼‘旳! B 帀 *rn n ■:riF YW «T in ib* 钻巒■nlM ・ e 1力『円「0,何■比 I 4- IJ I ■ Ml 曲 |Tfl4 hr r- fckdiie 4wne- M?p-]J 2加 甘植小乜CL fa W 31 E El KUhF* !1, 审 WlitM '■ g ^Ktd -IHC EIl ⑷册冇 Qg K aii e/y - B A ‘ 宝Hwlwr U I J^U ! t3 W-^SM B -in «U 4rrt^Ta* %n I H H wli aE 甘 hltnarl 旨內岭A] H CjMivi CdMT9 if C-OHKlInMt : 昭 I Mali创(-miitoMilj■ Ejwrfnr fact .f Mb乞H B 『鼻為& -x J r T n 一 :w 0 MoM fMhW-L ■灰 OM4L LE 中鼻Eai OfMW rti p T !--^ IdHI f - A ・■*<< X ・(V )屮 d 1*",・L=> ":昭!:站我 tbrian I ;E ■毗 CH-^R W«W^r. r<jw|a<r or ■ftoritf flvfFML LMII ^ sewihiH ・ ・H rr*Mi «<h rapd TK I M ar 4-cai p^ak^ad ■3=n> #ia ari -jn^tDr cad Ktk wrii:・ Mid… . PF T4J P «■ c * ® '■ ■ 29WW^ n.^.的图中位置加入下面的文字,输出屈曲模态Create job 名称为“ Buckling点击continue ,完成第1步的计算(D &eJfiew Sfte 口 Output Other loo-S Mug-in? Q [予 &J*nager..s & ModflL| Copy Modd 卜宕htod 亡呻O^Kt —\二也・ 甘 L宀 Ed4 Anri butts • Modd Viewport: 匕匕口人t 2 3 4 Modu *t 「-: Modd : x Rf^inw ► L 占 | Q slrt 电 . C> C^al ibralsDFS 4 S' Sectior-g (2221 _. -ix n __ i —. tafn第2步:极限强度分析将“ buckle ”分析步替换为“ riks ”分析步”二AE - -4J 1Bk 歴詔#1 嶠如pxt 垦w Qwpv* Other £M I*H呼戸屮L MRk +<* %女X M iM UnPnUdA 1®I {jiad— Vipjrptitl 乩疏1IF Jib-lpji Othgr Icids. s ij^'ns. £j?lp 审I J3S-中C叫匚却u g M 1Morit Re^yiii舜I制讶甘:QI |2 Meddf (I)::誠贰右ParH Q|jf |?< Mawfiaic i;7)宫Giibr』口M菟Sr Swtbn, [223fc> ZT I8UIbupt lilF*=,Qi Pi"; i; HiE 伍*M«teriali [2| fir tiEH-i.蛊h«Bor-s J_ - I 幸Pr^le i (KB■出Al i^ltlLiji 咼bbt印L -S Hitch Conlcxl Orl t S^piHeM B*»C C-iPTEr-*Time PALE AdMlJirftrratIwac Elm. &Hlfomtc iHipp^rtifi*Cc^ldc s■Cmitr;AddsAmoIrtLLo^di <^7W Ai HmEEiDMd &l Urd-rCall^pse JLJI LlndtrAridOHisscryModUt r 趾P■心ESIM CK:U I« rSlep在Basic 选项卡中,Nlgeom :选择打开在Instrumentation 选项卡中,定义如下参数,然后点击 Oih«rTI «•4^-rarpJlk ■ P -.uadlumbar & hcd«fn»rM :Iniiid Mnmurn MagnumArc le-^ih rKmiwc C J OI. L£-D15 ilfOJdE^mjied nzcdJ 1Ncrtt: Used] off tu rcompute :he DA lobd pruRiHiorin ry 口書定义一个新计算工作,输入名称,点击 con ti nueOK N JIE ■: Rika。
压杆屈曲分析1.问题描述在钢结构中,受压杆件一般在其达到极限承载力前就会丧失稳定性,所以失稳是钢结构最为突出的问题。
压杆整体失稳形式可以是弯曲、扭转和弯扭。
钢构件在轴心压力作用下,弯曲失稳是常见的失稳形式。
影响轴心受压构件整体稳定性的主要因素为纵向残余应力、初始弯曲、荷载初偏心及端部约束条件等。
实际的轴心受压构件往往会存在上述的一种或多种缺陷,导致构件的稳定承载力降低。
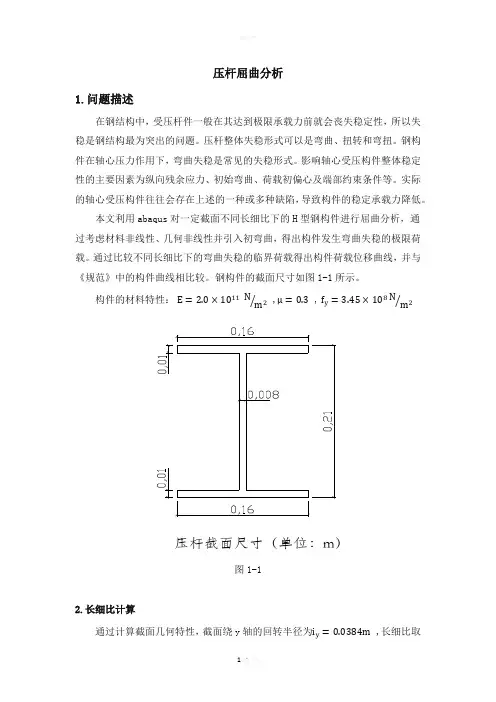
本文利用abaqus 对一定截面不同长细比下的H 型钢构件进行屈曲分析,通过考虑材料非线性、几何非线性并引入初弯曲,得出构件发生弯曲失稳的极限荷载。
通过比较不同长细比下的弯曲失稳的临界荷载得出构件荷载位移曲线,并与《规范》中的构件曲线相比较。
钢构件的截面尺寸如图1-1所示。
构件的材料特性: E =2.0×1011 N m 2⁄ ,μ=0.3 , f y =3.45×108N m 2⁄图1-12.长细比计算 通过计算截面几何特性,截面绕y 轴的回转半径为i y =0.0384m ,长细比取压杆截面尺寸(单位:m)值及杆件长度见表1:表13.模型分析ABAQUS非线性屈曲分析的方法有riks法,general statics法(加阻尼),或者动力法。
非线性屈曲分析采用riks算法实现,可以考虑材料非线性、几何非线性已及初始缺陷的影响。
其中,初始缺陷可以通过屈曲模态、振型以及一般节点位移来描述。
利用abaqus进行屈曲分析,一般有两步,首先是特征值屈曲分析,此分析为线性屈曲分析,是在小变形的情况进行的,也即上面提到过的模态,目的是得出临界荷载(一般取一阶模态的eigenvalue乘以所设定的load)。
其次,就是后屈曲分析,此步一般定义为非线性,原因在于是在大变形情况进行的,一般采用位移控制加修正的弧长法,可以定义材料非线性,以及几何非线性,加上初始缺陷,所以也称为非线性屈曲分析。
此步分析,为了得到极限值,需要得出荷载位移曲线的下降段。
压杆屈曲分析1.问题描述在钢结构中,受压杆件一般在其达到极限承载力前就会丧失稳定性,所以失稳是钢结构最为突出的问题。
压杆整体失稳形式可以是弯曲、扭转和弯扭。
钢构件在轴心压力作用下,弯曲失稳是常见的失稳形式。
影响轴心受压构件整体稳定性的主要因素为纵向残余应力、初始弯曲、荷载初偏心及端部约束条件等。
实际的轴心受压构件往往会存在上述的一种或多种缺陷,导致构件的稳定承载力降低。
本文利用abaqus对一定截面不同长细比下的H型钢构件进行屈曲分析,通过考虑材料非线性、几何非线性并引入初弯曲,得出构件发生弯曲失稳的极限荷载。
通过比较不同长细比下的弯曲失稳的临界荷载得出构件荷载位移曲线,并与《规范》中的构件曲线相比较。
钢构件的截面尺寸如图1-1所示。
构件的材料特性: , ,图1-12.长细比计算通过计算截面几何特性,截面绕y轴的回转半径为 ,长细比取值及杆件长度见表1:表13.模型分析ABAQUS非线性屈曲分析的方法有riks法,general statics法(加阻尼),或者动力法。
非线性屈曲分析采用riks算法实现,可以考虑材料非线性、几何非线性已及初始缺陷的影响。
其中,初始缺陷可以通过屈曲模态、振型以及一般节点位移来描述。
利用abaqus进行屈曲分析,一般有两步,首先是特征值屈曲分析,此分析为线性屈曲分析,是在小变形的情况进行的,也即上面提到过的模态,目的是得出临界荷载(一般取一阶模态的eigenvalue乘以所设定的load)。
其次,就是后屈曲分析,此步一般定义为非线性,原因在于是在大变形情况进行的,一般采用位移控制加修正的弧长法,可以定义材料非线性,以及几何非线性,加上初始缺陷,所以也称为非线性屈曲分析。
此步分析,为了得到极限值,需要得出荷载位移曲线的下降段。
缺陷较小的结构初始位移变形较小,在极值点突变,而初始缺陷较大的结构,载荷位移曲线较平滑。
4.建模计算过程建模计算过程以长细比为50的构件为例,其余构件建模计算过程与之类似。
整个计算过程包括2个分析步,第1步做屈曲分析,第2步做极限强度分析。
第1步:屈曲分析载荷步定义如下:Step 1-InitialStep 2- Buckle并在Model-Edit Keywords的图中位置加入下面的文字,输出屈曲模态*nodefile, global=yesU,Create job 名称为“Buckling”点击continue,完成第1步的计算。
第2步:极限强度分析将“buckle”分析步替换为“riks”分析步在Basic选项卡中,Nlgeom:选择打开在Instrumentation选项卡中,定义如下参数,然后点击OK定义一个新计算工作,输入名称,点击continue在Parallelization选项卡,选择2个CPU,如下所示,点击OK。
在此编辑Model-edit keywords,删除“第1步”加入的文字“*nodefile, global=yesU,”,并在下图位置加入下段文字:*imperfection, file=buckling, step=11,点击OK,再保存文件。
最后提交计算。
提取计算结果进入visualization Module 点击 Create XY data选择 ODB filed output,点击continuePosition选择 Unique Nodal, CF:point loads选择 CF2,再点击elements/nodes选项卡,选择跨中载荷加载点,最后点击save。
重复上一步操作,Position选择 Unique Nodal, U:spatial displacement 选择 U3,再点击elements/nodes选项卡,选择板格中心点,最后点击save。
点击Create XY data, 选择operate on XY data,点击continue选择Combine(X,X)命令,横坐标选择保存的displacement曲线,纵坐标选择保存的Point load曲线,点击最后一行Create XY Data与Save as。
基于ABAQUS复合材料薄壁圆筒的屈曲分析由于玻璃钢复合材料的薄壁圆筒结构具有强度高、重量轻、刚度大、耐腐蚀,电绝缘及透微波等优点,目前已广泛应用于航空航天和民用领域中。
工程中广泛使用的这些薄壁圆筒,当它们受压缩、剪切、弯曲和扭转等荷载作用时,最常见的失效模式为屈曲。
因此,为了保证结构的安全,需要进行屈曲分析。
对结构进行屈曲分析,涉及到较复杂的弹(塑)性理论和数学计算,要通过求解高阶偏微分方程组,才能求解失稳临界荷载,而且只有少数简单结构才能求得精确的解析解。
因此,只能采用能量法、数值方法和有限元方法等近似的分析方法进行分析。
近20年来,随着计算机和有限元方法的迅猛发展,形成了许多的实用分析程序,提高了对复杂结构进行屈曲分析的能力和设计水平。
ABAQUS 就是其中的杰出代表。
1.屈曲有限元理论有限元方法中,对结构的屈曲失稳问题的分析方法主要有两类:一类是通过特征值分析计算屈曲载荷,另一类是利用结合Newton—Raphson迭代的弧长法来确定加载方向,追踪失稳路径的几何非线性分析方法,能有效分析高度非线性屈曲和后屈曲问题。
1.1线性屈曲假设结构受到的外载荷模式为P0。
,幅值大小为λ,结构内力为Q,则静力平衡方程应为λP0=λQ进一步考察结构在(λ+△λ)P0载荷作用下的平衡方程,得到K E+K S S+λ△S+K G u+λu△u=△λP0由于结构达到保持稳定的临界载荷时有△λ,代入上式得K E+λK S△σ+K G△u△u=0该方程对应的特征值问题为det K E+λK S△σ+K G△u=0如果忽略几何刚度增量的影响,屈曲分析的方程又可进一步简化为det K E+λK S△σ=0该方程即为求解线性屈曲的特征值方程。
λ为屈曲失稳载荷因子,△u为结构失稳形态的特征向量。
1.2非线性屈曲非线性屈曲分析方法多采用弧长法进行分步迭代计算,在增量非线性有限元分析中,沿着平衡路径迭代位移增量的大小(也叫弧长)和方向,确定载荷增量的自动加载方案,可用于高度非线性的屈曲失稳问题。
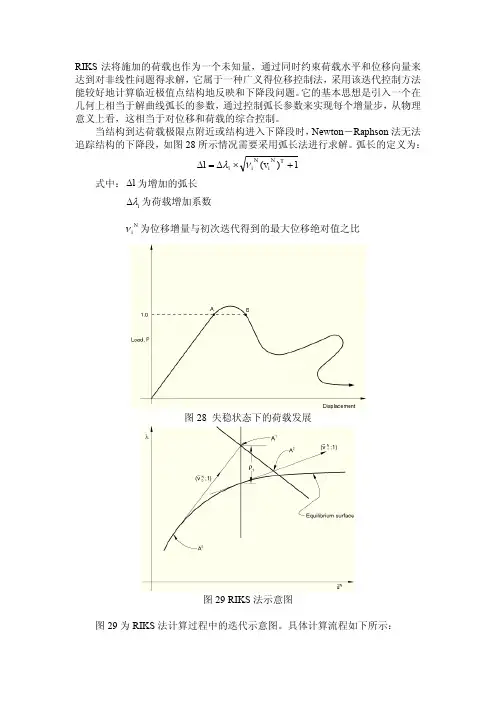
RIKS 法将施加的荷载也作为一个未知量,通过同时约束荷载水平和位移向量来达到对非线性问题得求解,它属于一种广义得位移控制法,采用该迭代控制方法能较好地计算临近极值点结构地反映和下降段问题。
它的基本思想是引入一个在几何上相当于解曲线弧长的参数,通过控制弧长参数来实现每个增量步,从物理意义上看,这相当于对位移和荷载的综合控制。
当结构到达荷载极限点附近或结构进入下降段时,Newton -Raphson 法无法追踪结构的下降段,如图28所示情况需要采用弧长法进行求解。
弧长的定义为:
1)(+⨯∆=∆T N
i N i i v l νλ 式中:l ∆为增加的弧长
i λ∆为荷载增加系数
N
i ν为位移增量与初次迭代得到的最大位移绝对值之比
图28 失稳状态下的荷载发展
图29 RIKS 法示意图
图29为RIKS 法计算过程中的迭代示意图。
具体计算流程如下所示:
初始情况下:
对于 i=迭代步 (i=1,2,3,etc): a. 形成内部节点应力矩阵I N
b. 检查平衡方程
如果R i N 足够小,则计算收敛,否则求解方程
得到v i N 和c i N
c. 将初始矢量(1,N i v )加上(N i N i c ρ,)(其中N
N N i i P P R /=ρ),这样解就由点A 1移动到点A 2,如图29所示。
求解等式
得到:
则最终的解为:
d. 更新到下一次迭代
返回到a,进行下一步迭代。
Abaqus屈曲分析(四)引入缺陷的Riks法A4-1 带初始缺陷的弧长法(载荷控制,正向缺陷)其他设置与弧长法一致。
在*End Assembly后插入关键字,*Imperfection, file=a1_buckle, step=11, 0.12引入正向缺陷,初始形状如上图所示。
A4-2 带初始缺陷的弧长法(载荷控制,负向缺陷)其他设置与弧长法一致。
在*End Assembly后插入关键字,*Imperfection, file=a1_buckle, step=11, -0.12引入负向缺陷,初始形状如上图所示。
A4-3 带初始缺陷的弧长法(位移控制,正向缺陷)设置与位移控制的弧长法一致A4-4 带初始缺陷的弧长法(位移控制,负向缺陷)设置与位移控制的弧长法一致弧长法(载荷控制):18476N弧长法(位移控制):18468N弧长法(正向缺陷,载荷控制):10666N弧长法(负向缺陷,载荷控制):15599N弧长法(正向缺陷,位移控制):10647N弧长法(负向缺陷,位移控制):15584N从以上结果可以看出,这种结构对缺陷很敏感,同样,作为一般规则,在对非对称结构进行建模时应格外小心,因为缺陷会产生截然不同的结果。
关于缺陷引入的一些要点:在模型中引入缺陷有两种方法:1.几何缺陷:是最常用的方法:模型初始几何形状的扰动导致结构以适当的方式变形。
2.加载缺陷:也可以用来确保结构以适当的方式变形,使用较小的虚拟触发载荷使模型变形,以使其正确弯曲。
几何缺陷:1.它们通常基于先前的特征值屈曲分析。
2.通常使用某些屈曲模式来扰动几何形状。
然而,一般认为最低阶屈曲模式会给出最关键的缺陷,所以通常情况下,使用较低的几阶屈曲模式来进行缩放,并添加到完整的几何形状中,以创建微扰动网格。
3.缺陷的大小应根据实际选择。
例如,缺陷的大小可以由制造公差决定。
通常选择的大小是相关结构尺寸的几个百分点,如梁的横截面或壳的厚度。
基于ABAQUS复合材料薄壁圆筒的屈曲分析由于玻璃钢复合材料的薄壁圆筒结构具有强度高、重量轻、刚度大、耐腐蚀,电绝缘及透微波等优点,目前已广泛应用于航空航天和民用领域中。
工程中广泛使用的这些薄壁圆筒,当它们受压缩、剪切、弯曲和扭转等荷载作用时,最常见的失效模式为屈曲。
因此,为了保证结构的安全,需要进行屈曲分析。
对结构进行屈曲分析,涉及到较复杂的弹(塑)性理论和数学计算,要通过求解高阶偏微分方程组,才能求解失稳临界荷载,而且只有少数简单结构才能求得精确的解析解。
因此,只能采用能量法、数值方法和有限元方法等近似的分析方法进行分析。
近20年来,随着计算机和有限元方法的迅猛发展,形成了许多的实用分析程序,提高了对复杂结构进行屈曲分析的能力和设计水平。
ABAQUS 就是其中的杰出代表。
1.屈曲有限元理论有限元方法中,对结构的屈曲失稳问题的分析方法主要有两类:一类是通过特征值分析计算屈曲载荷,另一类是利用结合Newton—Raphson迭代的弧长法来确定加载方向,追踪失稳路径的几何非线性分析方法,能有效分析高度非线性屈曲和后屈曲问题。
1.1线性屈曲假设结构受到的外载荷模式为。
,幅值大小为,结构内力为Q,则静力平衡方程应为进一步考察结构在载荷作用下的平衡方程,得到由于结构达到保持稳定的临界载荷时有,代入上式得该方程对应的特征值问题为如果忽略几何刚度增量的影响,屈曲分析的方程又可进一步简化为该方程即为求解线性屈曲的特征值方程。
为屈曲失稳载荷因子,为结构失稳形态的特征向量。
1.2非线性屈曲非线性屈曲分析方法多采用弧长法进行分步迭代计算,在增量非线性有限元分析中,沿着平衡路径迭代位移增量的大小(也叫弧长)和方向,确定载荷增量的自动加载方案,可用于高度非线性的屈曲失稳问题。
与提取特征值的线性屈曲分析相比,弧长法不仅考虑刚度奇异的失稳点附近的平衡,而且通过追踪整个失稳过程中实际的载荷、位移关系,获得结构失稳前后的全部信息,适合于高度非线性的屈曲失稳问题。
压杆屈曲非线性分析专业:结构工程******学号:**********压杆屈曲分析1.问题描述在钢结构中,受压杆件一般在其达到极限承载力前就会丧失稳定性,所以失稳是钢结构最为突出的问题。
压杆整体失稳形式可以是弯曲、扭转和弯扭。
钢构件在轴心压力作用下,弯曲失稳是常见的失稳形式。
影响轴心受压构件整体稳定性的主要因素为纵向残余应力、初始弯曲、荷载初偏心及端部约束条件等。
实际的轴心受压构件往往会存在上述的一种或多种缺陷,导致构件的稳定承载力降低。
本文利用abaqus 对一定截面不同长细比下的H 型钢构件进行屈曲分析,通过考虑材料非线性、几何非线性并引入初弯曲,得出构件发生弯曲失稳的极限荷载。
通过比较不同长细比下的弯曲失稳的临界荷载得出构件荷载位移曲线,并与《规范》中的构件曲线相比较。
钢构件的截面尺寸如图1-1所示。
构件的材料特性: E =2.0×1011 N m 2⁄ ,μ=0.3 , f y =3.45×108N m2⁄图1-1压杆截面尺寸(单位:m)2.长细比计算通过计算截面几何特性,截面绕y轴的回转半径为i y=0.0384m ,长细比取值及杆件长度见表1:表13.模型分析ABAQUS非线性屈曲分析的方法有riks法,general statics法(加阻尼),或者动力法。
非线性屈曲分析采用riks算法实现,可以考虑材料非线性、几何非线性已及初始缺陷的影响。
其中,初始缺陷可以通过屈曲模态、振型以及一般节点位移来描述。
利用abaqus进行屈曲分析,一般有两步,首先是特征值屈曲分析,此分析为线性屈曲分析,是在小变形的情况进行的,也即上面提到过的模态,目的是得出临界荷载(一般取一阶模态的eigenvalue乘以所设定的load)。
其次,就是后屈曲分析,此步一般定义为非线性,原因在于是在大变形情况进行的,一般采用位移控制加修正的弧长法,可以定义材料非线性,以及几何非线性,加上初始缺陷,所以也称为非线性屈曲分析。
压杆屈曲非线性分析专业:结构工程姓名:刘耀荣学号:2110150113压杆屈曲分析1.问题描述在钢结构中,受压杆件一般在其达到极限承载力前就会丧失稳定性,所以失稳是钢结构最为突出的问题。
压杆整体失稳形式可以是弯曲、扭转和弯扭。
钢构件在轴心压力作用下,弯曲失稳是常见的失稳形式。
影响轴心受压构件整体稳定性的主要因素为纵向残余应力、初始弯曲、荷载初偏心及端部约束条件等。
实际的轴心受压构件往往会存在上述的一种或多种缺陷,导致构件的稳定承载力降低。
本文利用abaqus 对一定截面不同长细比下的H 型钢构件进行屈曲分析,通过考虑材料非线性、几何非线性并引入初弯曲,得出构件发生弯曲失稳的极限荷载。
通过比较不同长细比下的弯曲失稳的临界荷载得出构件荷载位移曲线,并与《规范》中的构件曲线相比较。
钢构件的截面尺寸如图1-1所示。
构件的材料特性: E =2.0×1011 N m 2⁄ ,μ=0.3 , f y =3.45×108N m 2⁄图1-1压杆截面尺寸(单位:m)2.长细比计算通过计算截面几何特性,截面绕y轴的回转半径为i y=0.0384m ,长细比取值及杆件长度见表1:表13.模型分析ABAQUS非线性屈曲分析的方法有riks法,general statics法(加阻尼),或者动力法。
非线性屈曲分析采用riks算法实现,可以考虑材料非线性、几何非线性已及初始缺陷的影响。
其中,初始缺陷可以通过屈曲模态、振型以及一般节点位移来描述。
利用abaqus进行屈曲分析,一般有两步,首先是特征值屈曲分析,此分析为线性屈曲分析,是在小变形的情况进行的,也即上面提到过的模态,目的是得出临界荷载(一般取一阶模态的eigenvalue乘以所设定的load)。
其次,就是后屈曲分析,此步一般定义为非线性,原因在于是在大变形情况进行的,一般采用位移控制加修正的弧长法,可以定义材料非线性,以及几何非线性,加上初始缺陷,所以也称为非线性屈曲分析。
整个计算过程包括2个分析步,第1步做屈曲分析,第2步做极限强度分析。
第1步:屈曲分析
载荷步定义如下:
Step 1-Initial
Step 2- Buckle
;
并在Model-Edit Keywords的图中位置加入下面的文字,输出屈曲模态*nodefile, global=yes
U,
&
Create job 名称为“Buckling”
点击continue,完成第1步的计算。
第2步:极限强度分析
将“buckle”分析步替换为“riks”分析步
%
在Basic选项卡中,Nlgeom:选择打开
在Instrumentation选项卡中,定义如下参数,然后点击OK
定义一个新计算工作,输入名称,点击continue
在Parallelization选项卡,选择2个CPU,如下所示,点击OK。
[
在此编辑Model-edit keywords,删除“第1步”加入的文字“*nodefile, global=yes U,”,并在下图位置加入下段文字:
*imperfection, file=buckling, step=1
1,
点击OK,再保存文件。
最后提交计算。
提取计算结果
,
进入visualization Module
点击Create XY data
选择ODB filed output,点击continue
Position选择Unique Nodal,CF:point loads选择CF2,再点击elements/nodes 选项卡,选择跨中载荷加载点,最后点击save。
》
重复上一步操作,Position选择Unique Nodal,U:spatial displacement选择U3,再点击elements/nodes选项卡,选择板格中心点,最后点击save。
点击Create XY data, 选择operate on XY data,点击continue
选择Combine(X,X)命令,横坐标选择保存的displacement曲线,纵坐标选择保存的Point load曲线,点击最后一行Create XY Data与Save as。