根据MSP430单片机循迹小车
- 格式:doc
- 大小:1.48 MB
- 文档页数:24
基于MSP430的多功能小车摘要:本小车以MSP超低功耗单片机MSP430F168为控制核心,通过各种传感器采集外部信号,经过信号放大及滤波电路对信号进行处理后,利用单片机进行综合判别及对信号的运算处理,通过指令控制执行部件工作。
结合各信号处理及控制电路实现了小车的寻迹、避障、避悬崖、寻光、语音录放等功能,并且能够精确地在停车线附近停车。
本设计采用单片机输出PWM信号给集成驱动芯片来控制直流电机,使用了反射式红外传感器ST188检测红外线信号来矫正行车路线以及躲避障碍物和悬崖,通过光敏电阻检测光强。
多传感器并行工作,MCU 则提供外部检测信号综合处理,并控制小车的正确运行。
关键字:MSP430F168 PWM 寻迹避障避悬崖语音录放前言:多功能小车采用MSP430F168为控制器,采用多传感器进行信息采集,运用反射式红外传感器ST188进行路径检测和速度控制。
另外,采用PWM技术控制小车电机的转向与转速,系统还扩展了语音录放及趋光等功能。
此外,寻迹算法的采用使小车行进性能更加优越。
1.系统方案设计和论证系统可以划分为以下几个基本模块,其模块组成1.1控制核心的选择采用以MSP430F168为控制核心,所有编程语言围绕MSP430F168进行描述。
MSP430F168单片机,功耗低、运算速度快、精度高、外围模块丰富,像该单片机片上自带的比较捕获单元能够方便的产生频率和占空比可调的PWM信号,比其他单片机使用定时器来实现方便得多。
1.2检测方案的选择红外线光电传感器ST188能够检测到一定距离内自身发射的红外线信号,以下各功能模块的实现基于它的这个特性。
寻迹时小车行驶的跑道贴有黑色胶带,通过不同颜色背景对于光线的反射系数不同能够实现对寻迹时黑线的检测;而在避障环节则通过传感器能否接受到自身发出的红外线来判断前方是否存在障碍物;避悬崖实现原理与此类似,只是传感器安装方式不同。
使用ST188可以方便地实现实时监控,有效的防止误触发,灵敏度容易控制,而且可以改变电阻来增加红外光电传感器的探测距离,因此选择方案三。
基于MSP430的智能小车寻迹模块设计方案
本文详细介绍了反射式光电传感器寻迹模块的工作原理,寻迹模块的电路0 引言
智能小车又称轮式移动机器人,能够按预设模式在特定环境中自动移动,无需人工干预,可用于科学勘测、现代物流等方面。
针对路面采用黑色标记线条作为路径引导线的应用场合,反射式光电传感器是常用的路径识别传感器。
反射式光电传感器因信号处理方式和物理结构简单的特点而被广泛应用于结构化环境和低成本产品中,虽然存在检测距离近、预测性差的弱点,但通过合理设计和选择反射式光电传感器并结合合适的信息处理软件能够满足上述简单环境场合应用。
随着汽车ECU 电子控制的发展,在汽车上配备远程信息处理器,传感器和接收器,通过这些器件的协调控制可以实现汽车的无人驾驶。
本文提出基于MSP430 单片机的控制装置,通过反射式光电传感器寻迹,MSP430 单片机处理反射式光电传感器检测到的信号,从而控制智能车的转向,实现智能小车的自动寻迹。
1 系统总体设计方案
在小车车体的前端贴近地面的地方安装有4 组寻迹模块,如
单片机通过判断当前的运行状态,然后对L298 驱动模块进行相应的操作。
当正常时,不进行调整;当左偏时,通过对L298 驱动模块进行调整,使小车的左轮速度大于右轮速度,即可实现小车向右调整。
由于左偏有三种情形,但每种情形只是使能端的PWM 参数不同。
当右偏时,处理流程与左偏类似。
2 寻迹模块的硬件设计
绘制完成的反射式光电传感器电路。
基于MSP430的智能循迹运料小车设计
高振新;孙建红
【期刊名称】《实验室研究与探索》
【年(卷),期】2016(035)008
【摘要】用MSP430单片机设计了一种智能循迹运料小车,介绍了运料方式和系统总体设计框架.小车装料并检测有料后,通过红外反射式传感器TCRT5000检测路面信息并反馈给单片机,单片机输出PWM信号并通过L298N全桥驱动芯片控制小车电机运转,从而控制小车的路径和速度.当到达终点后,停车等待卸料,检测卸料完成后,返回起点重新装料,从而实现小车循迹运料的目的.小车运行还可通过红外遥控人为控制.试验结果表明,整个系统的电路结构简单,可靠性高,运行灵活方便,实现了预期的智能小车循迹运料功能.
【总页数】5页(P71-74,97)
【作者】高振新;孙建红
【作者单位】南京理工大学电子工程与光电技术学院,江苏南京210094;南京理工大学电子工程与光电技术学院,江苏南京210094
【正文语种】中文
【中图分类】TP273+.5
【相关文献】
1.基于STC12C5410的自动循迹运料电动车的设计 [J], 梁荫;黄冬梅
2.基于MSP430可循迹智能小车控制系统设计 [J], 杨楠;王恩泽
3.基于蓝牙监控的智能循迹运输小车设计 [J], 朱林海;洪晓芳;高芳芳;韩莉娜;刘茜
4.基于STM32的智能小车循迹优化设计 [J], 曾尧
5.基于STM32的智能小车循迹避障测距的设计 [J], 洪一民;钱庆丰;章志飞
因版权原因,仅展示原文概要,查看原文内容请购买。
智能循迹小车【摘要】智能循迹小车的设计是以MSP430F149单片机为控制核心,利用TCRT5000反射式光电传感器、比较器实现黑线检测,并将检测的信息送单片机分析和处理,单片机根据计算和分析的结果,控制电机的速度及方向,从而实现自动循迹功能。
其中驱动电机由L298N驱动电路实现,速度由单片机输出的PWM实现,并通过单片机内部的AD采样,采样传感器的电压值,根据采集的数据判断小车的行驶状态。
为了实现人机交互功能,设计中增加了LCD和键盘,用LCD12864液晶显示器来显示所检测的黑线状态,按键实现小车的启动和停止。
经测试,智能循迹小车能够自动识别黑线,按照引导线行进,可以左转、右转,也可对测量结果进行实时显示。
达到了预期要求。
【关键字】小车 MSP430单片机 L298N TCRT5000传感器Abstract: The design of intelligent tracking car is based on MSP430F149 microcontroller as the control core ,TCRT5000 reflection type photoelectric sensor is used for comparator implement todetect black line, the information will be sent to microcontroller to analysis and processing,besides, microcontroller according to the result of calculation and analysis control the motor speed and direction, so as to realize automatic tracking function.the drive motor driven by L298N circuit implementation, speed was controlled by PWM output, according to the single chip microcomputer internal AD sampling to collected data so as to judge state of driving cars.In order to reaches interface friendly , the design of LCD and keyboard has been increased in, LCD12864 to display the state of detection by the black line, start and stop buttons to control the car run or not.After testing ,the tracking car can automatically identify the black line, the car can turn left, turn right by it , also may carry on the real-time display of measurement results. The system reaches expected require.Keywords:Intelligent car MSP430F149 L298N TCRT5000 sensor1.方案设计1.1总体方案设计根据题目要求,本系统设计的目标主要包括控制部分,循迹部分,驱动部分,显示部分等组成。
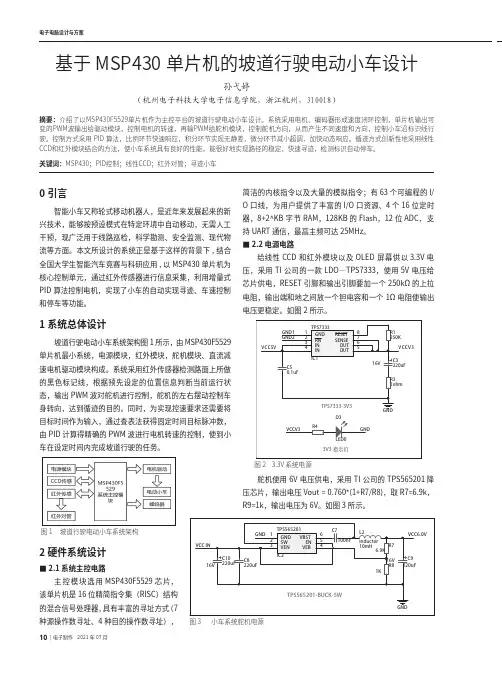
基于MSP430单片机的风动力寻迹小车设计作者:朱文明李辉来源:《河南科技》2018年第04期摘要:该实验设计制作的是基于MSP430F149单片机的智能循迹小车。
该设计由红外寻迹传感器、MSP430单片机和6612电机驱动电路等组成。
该控制技术目前已被用于智能停车场盘、无人仓库运货和服务型机器人等领域。
关键词:智能循迹;MSP430F149单片机;红外寻迹传感器中图分类号:TP242.6 文献标识码:A 文章编号:1003-5168(2018)04-0036-02Design of Wind Power Tracking Trolley Based on MSP430 MCUZHU Wenming LI hui(Department of Electrical Engineering, Shaoyang University,Shaoyang Hunan 422000)Abstract: The experimental design of intelligent tracking car based on MSP430F149 MCU. The design is composed of an infrared trace sensor, a single chip microcomputer MSP430 and a 6612 motor drive circuit. The control technology has been used in the field of intelligent parking lot,unmanned warehouse delivery, service robot and so on.Keywords: intelligent tracking;MSP430F149 MCU;photoelectric sensor智能汽车技术主要包含以下三重功能,即智能感知提前报警系统、车辆动力系统和全自动操作系统。
华中科技大学电子与信息工程系2013年TI杯电子设计大赛项目总结报告项目名称:基于MSP430F5529的智能小车设计团队成员:通信工程通信工程通信工程课题名称:智能小车自动控制系统【摘要】本次课程设计以MSP430超低功耗单片机系列MSP430F5529为主控制器,附加电机、电池、传感控制模块等,完成二驱小车自由运动、检测黑白线实现沿轨道自动运行、能够避开障碍物、无线控制等功能,F5529的I/O口丰富,使得各个功能模块之间信息交流快捷方便。
在机械结构上,我们选购用一个万用轮代替两个前轮的小车,大幅度提高了小车的灵敏度。
利用单片机产生PWM波,控制小车速度,选用L298N驱动芯片驱动电路,使用三路红外对接管检测黑白线,使用一个超声波实现测距壁障功能,使小车能够自动左转避开障碍物,使用无线控制模块,可实时控制小车运动。
基于可靠的硬件设计和更加优化的软件算法,在实现本课设基本要求的基础上,可实现部分扩展功能。
【关键词】:MSP430F5529 循迹无线控制超声波测距壁障Abstract This curriculum project uses MSP430F5529, in the series of MSP430 ultra low power single chip microcomputer, as its main controller. In addition, the realization of the controller’s function can not leave motor, battery, sensing control template and so on, for example, free movement of the two drive vehicle, and automatic operation along runway by testing black and white lines, avoiding obstacles, wireless operation and other functions. The quick and easy information exchanging among each functional template has to thank to the abundance of I/O of F5529. On mechanical structure, two front wheels of the mini car are replaced by a universal wheel, so as to improve its sensitivity by large margin. PWM is used to control motor and single chip microcomputer to make PWM wave, in order to control its speed. The car can stop and turn left to avoid obstacles because L298N driving chip drives circuit, three infrared ray on pipes is used to test black and white lines, and an ultrasonic template is chosen to realize ranging barrier function. With wireless operating template, movement of the mini car can reach real-time control. Besides finishing basic requirement of this curriculum project, some broadening functions can also be achieved based on reliable hardware design and better software algorithm.Key words: MSP430F5529 tracking wireless control ultrasonic wave ranging counterguard目录1 概述 (3)2 设计目标 (3)3 团队组成与任务分工 (4)4 方案论证 (4)4.1 电机驱动模块 (4)4.2 循迹模块 (5)4.3 无线模块 (5)4.4 测距壁障模块 (5)5 系统总体设计 (7)5.1 总体设计思路 (7)5.2 主要器件选择 (7)5.3 主要元器件清单 (8)7 系统各模块设计与实现 (15)7.1 电机驱动模块 (15)7.2 循迹模块 (16)7.3 无线模块 (16)7.4 超声波测距壁障模块 (17)9 心得与总结 (26)10 致谢 (27)11 参考文献 (27)12 附录 (27)1.概述随着控制技术及计算机技术的发展,智能车系统将在未来工业生产和日常生活中扮演重要的角色。
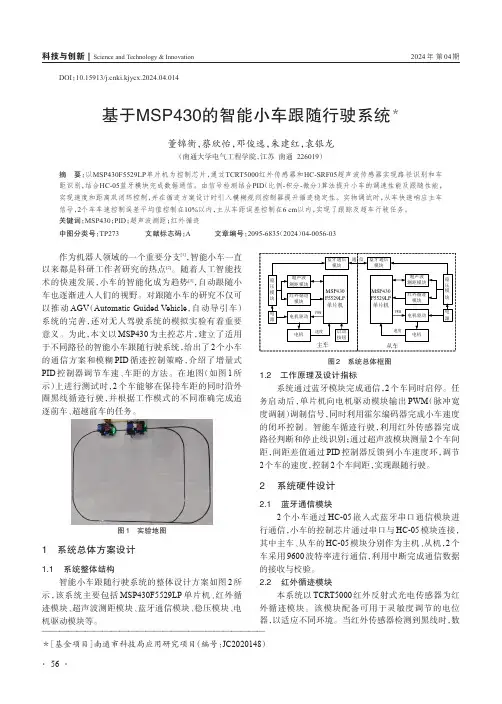
科技与创新|Science and Technology & Innovation2024年 第04期DOI :10.15913/ki.kjycx.2024.04.014基于MSP430的智能小车跟随行驶系统*董锦衡,蔡欣怡,邓俊逸,朱建红,袁银龙(南通大学电气工程学院,江苏 南通 226019)摘 要:以MSP430F5529LP 单片机为控制芯片,通过TCRT5000红外传感器和HC-SRF05超声波传感器实现路径识别和车距识别,结合HC-05蓝牙模块完成数据通信。
由信号检测结合PID (比例-积分-微分)算法提升小车的调速性能及跟随性能,实现速度和距离双闭环控制,并在循迹方案设计时引入模糊规则控制器提升循迹稳定性。
实物调试时,从车快速响应主车信号,2个车车速控制误差平均值控制在10%以内,主从车距误差控制在6 cm 以内,实现了跟踪及超车行驶任务。
关键词:MSP430;PID ;超声波测距;红外循迹中图分类号:TP273 文献标志码:A 文章编号:2095-6835(2024)04-0056-03——————————————————————————*[基金项目]南通市科技局应用研究项目(编号:JC2020148)作为机器人领域的一个重要分支[1],智能小车一直以来都是科研工作者研究的热点[2]。
随着人工智能技术的快速发展,小车的智能化成为趋势[3],自动跟随小车也逐渐进入人们的视野。
对跟随小车的研究不仅可以推动AGV (Automatic Guided Vehicle ,自动导引车)系统的完善,还对无人驾驶系统的模拟实验有着重要意义。
为此,本文以MSP430为主控芯片,建立了适用于不同路径的智能小车跟随行驶系统,给出了2个小车的通信方案和模糊PID 循迹控制策略,介绍了增量式PID 控制器调节车速、车距的方法。
在地图(如图1所示)上进行测试时,2个车能够在保持车距的同时沿外圈黑线循迹行驶,并根据工作模式的不同准确完成追逐前车、超越前车的任务。
摘要随着现代科技术的进步,公路交通呈现出行驶高速化、车流密集化的趋势。
同时,随着汽车工业的飞速发展,汽车的产量和保有量都在急剧增加。
但公路发展、交通管理相对落后,导致了交通事故与日俱增,城市交通拥堵成为城市管理的难题。
本设计在汽车前端放置超声波检测装置,通过对前方汽车车距的检测,送到中心控制器作出判断,进行车辆车速控制,从而达到车辆主动平安行驶,防止不需要的碰撞。
设计利用智能小车来模拟真实车辆行驶环境,采取红外对管检测黑线实现循迹,超声波传感器测距实现避障,采取MSP430G2553作为主控制芯片,电动车电机驱动采取L298N芯片,根据内置的程序分别控制小车四个直流电机运转,实现小车自动识别路线循迹行驶,能较有效的控制其在碰上障碍物时能及时停车。
本设计结构简单,较容易实现,具有一定的智能性。
这个系统装置在汽车上,能探测车辆前方的行人、车辆或周围障碍物,能向司机提前发出即将发生撞车危险的信号,促使司机采纳应急措施来应付特殊险情,防止损失,在日常交通环境中提高了车辆行驶平安性,具有一定的市场推广价值。
关键词:智能小车;msp430单片机;L298N;超声波传感器;红外传感器AbstractAlong with the progress of modern science and technology, the trend of highway transportation is the trend of high speed and traffic flow.. At the same time, with the rapid development of the automobile industry, the output and the quantity of the automobile are increasing sharply.. However, the development of highway, traffic management is relatively backward, resulting in the traffic accident growing, urban traffic congestion become the city management problems.The design at the front end of the car placedultrasonic detection device, through the distance to the front vehicle detection, sent to the central controller to judge, vehicle speed control, so as to achieve vehicle active safety driving, avoid unnecessary collision. Design using the smart car to simulate the real vehicle driving environment, using infrared to detect black line pipe to achieve the tracking, ultrasonic ranging sensor to achieve obstacle avoidance and the msp430g2553 as the main control chip, motor drive using L298N chip, built-in procedures according to respectively control car four DC motor running, achieve automatic car identification route tracking driving, can more effectively control the run into obstacles can stop in time. This design is simple and easy to achieve, with a certain intelligence.The system was installed in the car, can detect vehicles in front of the pedestrians, vehicles, or around obstacles., to the driver in advance from the impending collision danger signal, to urge the driver to take emergency measures to cope with the special danger, avoid losses, in daily traffic environment improves the vehicle driving safety, has a certain market popularization value.Keywords: Intelligent car; MSP430 microcontroller; L298N; ultrasonic sensor; infrared tube目录1 绪论1.1 课题布景随着汽车科学技术的进步,公路交通呈现出行驶高速化、车流密集化的趋势。

智能循迹小车报告摘要:本设计由寻迹信息采集电路,电机驱动电路以及MCU 控制模块四大部分构成。
MCU 控制模块是本设计的核心部分,该部分以一片TI 公司的MSP430F149 为控制中心,实现对各个模块的控制。
寻迹信息采集部分以反射式光电传感器和比较器组成,将采集到的数据处理后送至单片机。
电机由以L298N 为核心部件的电路驱动。
该小车具有自动寻迹起始点检测功能。
基于稳定的硬件电路设计以及精确可靠的软件算法,小车能够实现预期功能。
关键词:MSP430,L298N,寻迹。
一、循迹信息采集模块小车在前进时,要实现寻迹功能,可以采用高灵敏度的反射式光电传感器对地面进行扫描,再将采集到的数据经过比较器后输出高低电平,最后送入单片机处理。
经过对一只ST188 的测试,发现ST188 接收管输出端的低电平输出大致为0.78V,高电平的输出大致为2.85V,经过比较器后输出低电平为0.03V,高电平为3.26V,能够被单片机所识别。
小车在白色地面行驶时,红外发射管发出的红外信号被反射,接收管收到信号后,输出端为低电平。
而当红外信号遇到黑色导轨时,红外信号被吸收,接收管不能接收到信号,输出端为高电平。
单片机通过采集每个红外接收管的输出端电压,便可以检测出轨道的位置,从而控制小车的转向,使小车一直沿轨道前进。
ST188采用高发射功率红外光电二极管和高灵敏度光电晶体管组成。
检测距离为4-13mm。
本小车一共采用了5只ST188光电对管,一只位于黑线上方,两只位于黑线左右用于直走微调,最左最右端两只用于转弯。
我们在光电对管的发射端串联的一个电位器来调节发射管的电压,以便在不同的环境下进行调节。
循迹模块原理如图所示:注意:在实际制作中,光电对管应尽量靠近地面,以减少干扰。
二、电压比较模块电压比较模块我们采用了3块LM393芯片,一块LM393芯片上有两个电压比较模块,我们只用到了其中的5个电压比较。
我们在LM393的同向输入给定一个参考电压,与在端光电对管的接收端的电压进行比较,若接收端电压比参考电压大,则输出一个,反之输出一个。
第30卷第6期孝感学院学报V OL.30 NO.6 2010年11月JOURNAL OF XIAOGAN UNIVERSITY N O V.2010基于M SP430单片机的智能小车设计与实现陈晶晶(龙岩学院物理与机电工程学院,福建龙岩364012)摘 要:介绍了一种以M SP430单片机作为核心控制单元的智能小车的设计方法。
由安装在车头和轮胎上的传感器负责采集各种信号,并将采集到的电平信号传给单片机,单片机经过处理后控制电机,完成小车的前进,转向和路程显示功能。
给出了小车系统的硬件和软件设计方法,经过实际测试,能够完成所有功能。
该设计可用在自动停车系统和工厂的运料车上。
关键词:智能小车;传感器;单片机;路面检测中图分类号:T P24 文献标识码:A 文章编号:1671-2544(2010)06-0055-03随着计算机技术、信息技术和人工智能技术的飞速发展,智能车的使用越来越普及,相对于传统的汽车而言,智能小车有着更好的安全性、机动性和广泛的适用性[1]。
与此同时,科学技术和生产力的发展也使智能车在探险、排爆以及工厂运料等领域发挥的作用逐渐增大。
因此,智能车的研制问题也成为一个热门。
本文着重介绍了以msp430单片机作为核心控制单元,通过处理外部传感器传回的数据,自动实现巡线、避障等功能。
1 方案设计本智能车采用T I公司的msp430单片机作为唯一的核心控制单元,该系列单片机具有功耗低,功能强大,接口丰富等优点[2]。
通过此芯片设计出的智能小车具有省电和抗外部干扰强的优点,可以长时间在恶劣环境下工作。
小车系统一共由电源模块、电机驱动模块、路面探测模块和路程计算模块组成。
电源模块采用灵活方便的单电源供电模式,为所有模块供电。
路面探测模块使用反射式红外传感器负责采集各种路面信息,并将采集到的信号反馈给核心控制单元,核心控制单元对采集到的信号进行处理和判别,产生不同占空比的PWM波形分别控制转向电机、前进与后退电机。
总630期第二期2018年2月河南科技Henan Science and Technology 基于MSP430单片机的风动力寻迹小车设计朱文明李辉(邵阳学院电气工程学院,湖南邵阳422000)摘要:该实验设计制作的是基于MSP430F149单片机的智能循迹小车。
该设计由红外寻迹传感器、MSP430单片机和6612电机驱动电路等组成。
该控制技术目前已被用于智能停车场盘、无人仓库运货和服务型机器人等领域。
关键词:智能循迹;MSP430F149单片机;红外寻迹传感器中图分类号:TP242.6文献标识码:A 文章编号:1003-5168(2018)04-0036-02Design of Wind Power Tracking Trolley Based on MSP430MCUZHU Wenming LI hui(Department of Electrical Engineering,Shaoyang University ,Shaoyang Hunan 422000)Abstract:The experimental design of intelligent tracking car based on MSP430F149MCU.The design is composed of an infrared trace sensor,a single chip microcomputer MSP430and a 6612motor drive cir⁃cuit.The control technology has been used in the field of intelligent parking lot,unmanned warehouse de⁃livery,service robot and so on.Keywords:intelligent tracking ;MSP430F149MCU ;photoelectric sensor智能汽车技术主要包含以下三重功能,即智能感知提前报警系统、车辆动力系统和全自动操作系统。