基于CANopen协议多轴联动系统设计与研究
- 格式:doc
- 大小:323.50 KB
- 文档页数:4

工程机械控制技术专业毕业设计论文:基于CANopen协议的工程机械控制系统设计摘要本文基于CANopen协议,对工程机械控制系统进行了设计。
首先介绍了研究背景和意义,接着阐述了研究的目的和方法。
在方法部分,详细介绍了CANopen协议的特点和优点,以及系统的总体设计和详细设计。
然后在实验部分,对所设计的控制系统进行了仿真实验和分析。
最后,对研究的结果和结论进行了总结,并指出了研究的局限性和未来发展方向。
一、研究背景和意义工程机械在建筑、交通运输、矿山、农业等领域中具有重要作用。
随着科技的发展,现代工程机械逐渐向智能化、高效化、可靠化和安全化方向发展。
控制系统作为工程机械的核心部分,对于整个系统的性能和稳定性具有决定性作用。
CAN (Controller Area Network)是一种用于汽车、工业自动化等领域的高性能网络系统,具有传输速度快、可靠性高、灵活性好等优点。
CANopen协议是CAN总线的一种高层协议,能够提供较高的网络管理和诊断功能。
在工程机械控制系统中,基于CANopen协议的设计具有广泛的应用前景。
本文的研究旨在基于CANopen协议,设计一种高效、稳定、可靠的工程机械控制系统。
通过研究,可以提高工程机械的自动化水平、降低故障率、提高工作效率和安全性。
二、研究目的和方法本研究的主要目的是基于CANopen协议,设计一种适用于工程机械控制系统的网络架构和控制系统。
具体而言,研究内容包括:1. CANopen协议的特点和优点:深入研究CANopen协议的原理和应用,了解其特点和优点,为系统设计提供理论支持。
2. 控制系统总体设计:根据工程机械的实际情况,设计基于CANopen协议的控制系统总体结构,包括网络拓扑结构、设备节点、通信配置等。
3. 控制系统详细设计:根据总体设计,进行控制系统的详细设计,包括硬件设计、软件设计和系统调试等。
本研究采用的方法主要包括网络通信理论、控制理论和系统设计等。
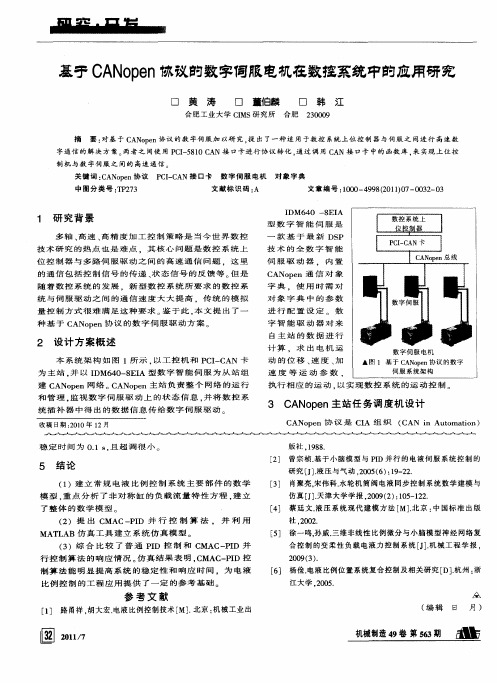
中图分类号:T M30112 文献标志码:A 文章编号:100126848(2009)0920053204基于C ANopen 协议实现多电机系统实时控制李 澄,赵 辉,聂保钱(哈尔滨工业大学控制与仿真中心,哈尔滨 150001)摘 要:以混合动力试验台的研制为背景,结合车辆控制中CAN 总线的普及应用,分析并采用CAN 总线的高层CANopen 协议,实现了试验台中多电机系统的实时控制。
提供的CANopen 主从站节点的构建与设置以及功能编程方法,在系统实际运行中得以充分验证。
相关实现方案适用于多数工业自动化应用场合。
关键词:CAN 总线;CANopen 协议;多电机系统控制;现场总线;电机控制I m ple m en t a ti on of Rea l 2ti m e Con trol of M ulti 2m otor Syste m sBa sed on CANopen Protocol L I Cheng,ZHAO Hui,N IE Bao 2qian(Contr ol and Si m ulati on Center,Harbin I nstitute of Technol ogy,Harbin 150001,China )Abstract:Taking the devel opment of a HEV (Hybrid Electric Vehicle )test bench as the backgr ound,taking the popular app licati on of CAN bus in the vehicle industry int o account,this paper p resented a sche me t o i m p le ment the real 2ti m e contr ol of multi 2mot or syste m s in the test bench .One of CAN high layer p r ot ocol,CANopen had been analyzed and adop ted t o realize the real 2ti m e communicati on .Thebuilding and setting of the CANopen master and slave nodes,and relevant p r ogra m fl ow charts were p res 2ented in detail .Verified by the teat and operati on of the real syste m ,the sche me that app lied in this pa 2per is app licable in most industrial aut omati on app licati ons .Key W ords:CAN bus;CANopen p r ot ocol;Multi 2mot or syste m s contr ol;Fieldbus;Mot or contr ol收稿日期:20082052310 引 言CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络[1]。

基于CANopen协议的多机通讯设计
武强;杨玉岗
【期刊名称】《微计算机信息》
【年(卷),期】2011(027)006
【摘要】针对煤矿中多机通讯系统要求远距离、抗干扰性强等特点,介绍了基于CANopen协议的多机通讯设计方法.基于TMS320F2812DSP的变频器平台,采用一主节点和两从节点组成CANopen网路的多机通讯方案.通过主节点与任一从节点的SDO报文和PDO报文的通信以及从节点一致性的实验表明,基于CANopen 协议的多机通讯数据传输快速、可靠性高、抗干扰性强.
【总页数】3页(P87-89)
【作者】武强;杨玉岗
【作者单位】125105,辽宁省,葫芦岛,辽宁工程技术大学,电气与控制工程学
院;125105,辽宁省,葫芦岛,辽宁工程技术大学,电气与控制工程学院
【正文语种】中文
【中图分类】TD655
【相关文献】
1.基于RS485总线技术的PC机与单片机多机通讯设计 [J], 田拥军;赵光强;曾健平
2.基于RS-422总线的单片机多机通讯接口的设计与实现 [J], 桑胜举;张华;沈丁;安琦
3.基于RS485总线的嵌入式多机通讯设计 [J], 孟昭莹
4.基于CANopen协议的主节点通讯实现 [J], 邓遵义;宁祎
5.基于ATMEGAl28双串口的多机通讯接口板设计 [J], 孔秀艳
因版权原因,仅展示原文概要,查看原文内容请购买。

基于CANopen协议的工程车辆网络系统的设计与实现的开题报告一、选题背景和意义随着工业自动化与信息化的快速发展,网络化的工程车辆系统逐渐成为现代工程施工领域的发展趋势和研究重点。
目前,工程车辆网络系统已广泛应用于煤矿、港口、城市道路施工、铁路维护等领域。
在工程车辆系统的设计中,车辆控制系统、通信系统、传感器系统等关键技术的应用,能够极大地提高工程施工效率和安全性,减少劳动力和物力的浪费。
CANopen协议作为一种常用的工业控制网络协议,已被广泛应用于工程车辆网络系统中。
因此,基于CANopen协议的工程车辆网络系统的设计与实现具有重要的实际意义和研究价值。
二、研究目的和内容本课题旨在研究和设计一种基于CANopen协议的工程车辆网络系统,通过实现车辆控制、通信和传感器等系统互联,提高工程施工的效率和安全性。
具体研究内容包括:1. CANopen协议的理论知识和通信机制等研究;2. 工程车辆控制系统设计,包括数据采集、传输和处理等功能实现;3. 工程车辆通信系统设计,基于CANopen协议实现车辆与车辆之间、车辆与控制站之间的数据交换;4. 工程车辆传感器系统设计,通过传感器采集数据,实现对车辆的状态监测和控制。
三、研究方法和技术路线首先,通过文献调研和理论学习,掌握CANopen协议的基础知识和通信机制等内容;其次,设计车辆控制系统,包括采集、传输和处理数据等功能实现;然后,设计车辆通信系统,通过CANopen协议实现车辆之间、车辆与控制站之间的数据交换;最后,设计车辆传感器系统,通过传感器采集数据实现对车辆的状态监测和控制。
具体技术路线如下:1. 确定研究内容和任务,进行文献调研和理论学习;2. 设计工程车辆控制系统,包括数据采集、传输和处理等功能;3. 设计工程车辆通信系统,实现车辆之间、车辆与控制站之间的数据交换;4. 设计工程车辆传感器系统,通过传感器采集数据实现对车辆的状态监测和控制;5. 进行系统集成和测试,验证系统的正确性和稳定性。

基于Canopen协议的运动控制系统设计刘玉倩张文靳卫国王慧(中国电子科技集团公司第四十五研究所,北京,101601)摘要:描述了一种最广泛应用的现场总线CAN和最为成功的CAN应用层协议Canopen,介绍了CAN +Canopen工业控制总线解决方案,重点阐述了这种解决方案在一种工业控制模型中的实现。
同时对软件设计、设备调试中的问题提出解决方案,对系统效率、可靠性进行测试优化。
关键词:CAN;Canopen;运动控制;软件编程中文分类号:文献标志码:文章编号:Motion Control System Design Based on Canopen protocolLiu Yuqian, Fu Chunhe, Zhang Wen, Jin Weiguo(The 45th Research Institute of CETC,Beijing 101601,Chia)Abstract:This paper describes a widely used fieldbus CAN and the successful Application layer protocol Canopen ,introduces the CAN and Canopen industry control fieldbus solutions, emphatically expounds the realization of the field bus resolution in the industry control model. At the same time, put forward resolvents of problems in software design and machine debugging, tests and optimizes the system’s stability and efficiency.KeyWord: CAN;Canopen;motion control;software programCAN总线系统解决方案是利用CAN总线的优点及其特长为机器自动化设备提供高效、可靠、性价比高的解决方案。
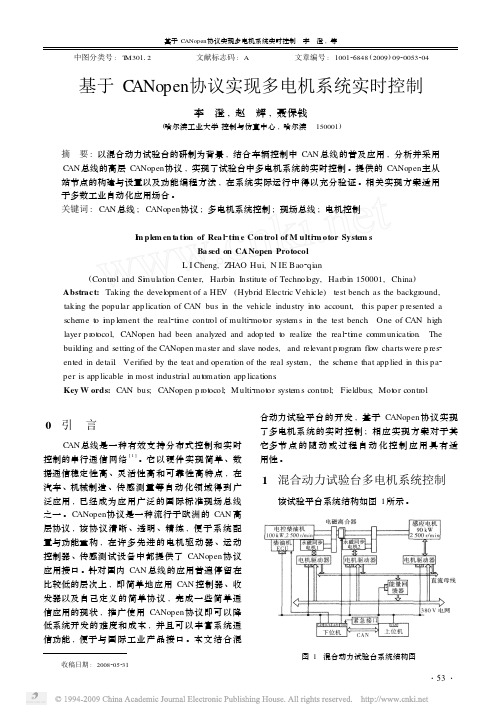
2019年12月第47卷第23期机床与液压MACHINETOOL&HYDRAULICSDec 2019Vol 47No 23DOI:10.3969/j issn 1001-3881 2019 23 033本文引用格式:孙松丽,朱文亮,黄晓华,等.基于CANopen总线的弯管机多轴运动控制系统设计与实现[J].机床与液压,2019,47(23):153-159.SUNSongli,ZHUWenliang,HUANGXiaohua,etal.DesignandImplementationofMulti⁃axisMotionControlSystemforTube⁃bendingMachineBasedonCANopenBus[J].MachineTool&Hydraulics,2019,47(23):153-159.收稿日期:2018-08-11作者简介:孙松丽(1975 ),女,硕士,副教授㊁高级工程师,研究方向为机电控制系统㊁工业机器人技术及应用㊂E-mail:sunsongli75@163 com㊂通信作者:黄晓华(1969 ),男,博士,副教授,研究方向为机械制造及自动化㊂E-mail:michhxh@163 com㊂基于CANopen总线的弯管机多轴运动控制系统设计与实现孙松丽1,朱文亮2,黄晓华3,瞿志俊1(1.南京理工大学泰州科技学院智能制造学院,江苏泰州225300;2.淮海工学院机械与海洋工程学院,江苏连云港222005;3.南京理工大学机械工程学院,江苏南京210094)摘要:以弯管机多运动轴机械系统为基础,采用ESTUN运动控制器+MCGS触摸屏的硬件配置,在VTB集成编程环境下,为实现基于CANopen总线的多轴交流伺服系统控制,对单轴定位运动控制实现路径进行了详细的设计㊂为实现弯管C轴与送料Y轴在弯管工序下的同步协调运动,提出了速度主从同步控制与伺服驱动器转矩限制相结合的控制方案,达到了弯管时Y轴主动送料与被动送料的自适应调整㊂工程应用结果表明:该系统工作可靠㊁性能良好,经济性佳㊂关键词:运动控制;可视化工具基础(VTB);CANopen;单轴定位;双轴同步中图分类号:TP273DesignandImplementationofMulti⁃axisMotionControlSystemforTube⁃bendingMachineBasedonCANopenBusSUNSongli1,ZHUWenliang2,HUANGXiaohua3,QUZhijun1(1.SchoolofIntelligentManufacturing,TaizhouInstituteofScience&Technology,NJUST,TaizhouJiangsu225300,China;2.SchoolofMechanicalandOceanEngineering,HuaihaiInstituteofTechnology,LianyungangJiangsu222005,China;3.SchoolofMechanicalEngineering,NanjingUniversityScience&Technology,NanjingJiangsu210094,China)Abstract:Basedonthemulti⁃motionaxismechanicalsystemofthetube⁃bendingmachine,hardwareconfigurationusingESTUNmotioncontroller+MCGStouchscreenisadoptedandintheintegratedprogrammingenvironmentofVisualTurboBasic(VTB),fromtheperspectiveofcontrolimplementationofmulti⁃axisACservosystembasedonControllerAreaNetwork(CANopen)bus,therealiza⁃tionpathofthesingle⁃axispositioningmotioncontrolisdesignedindetail.Inordertorealizethesynchronousandcoordinatedmove⁃mentofthecurvedC⁃axisandthefeedingY⁃axisinthebendingprocess,acontrolschemecombiningthespeedmaster⁃slavesynchro⁃nouscontrolandthetorquelimitoftheservodriverwasproposed,whichachievedtheadaptiveadjustmentoftheYaxisactivefeedingandpassivefeeding.Theresultofengineeringapplicationshowsthatthesystemworksreliably,andhasgoodperformanceandeconomy.Keywords:Motioncontrol;VTB;CANopen;Singleaxispositioning;Dualaxissynchronization0㊀前言中国制造2025 国家战略实施以来,快速推动了传统制造业转型升级的发展速度,提升了发展质量,高端制造㊁智能制造已成为现代制造业的典型特征㊂高精度㊁高速度㊁柔性化㊁网络化已成为现代数控技术的发展方向[1]㊂多轴运动控制系统在高端制造装备中被广泛采用[2]㊂为实现高精度多轴控制,有效协调各轴运动过程,高速实时数据交换是关键要素之一[3]㊂作为一种工业数据总线,现场总线主要解决工业现场设备之间的信息传递问题,具有抗干扰性好㊁传输速度快㊁双向同时通信等优点,近年来得到迅速发展和广泛应用[4]㊂将现场总线技术应用于伺服系统也已成为运动控制领域研究热点之一㊂CANopen协议是一种基于CAN总线的应用层协议,由CiA协会1994年推出㊂基于此协议的CANopen总线具有传输距离长㊁数据传输速度率大㊁总线成本低㊁总线利用率高等特点[5],广泛应用于运动控制㊁工程机械㊁船舶运输㊁电梯网络等行业㊂因此,本文作者基于弯管机多运动轴本体结构,提出以运动控制器为控制核心的弯管机控制系统设计方案,并将CANopen现场总线技术应用其中,以实现多轴伺服系统的协调控制㊂基于CANopen总线的多轴运动控制较脉冲控制的实时性好㊁传输快㊁节省硬件数量㊁抗干扰能力强㊁开放性好㊁便于网络管理[6-7],可以很好地满足弯管机高精度㊁高效率㊁柔性化的管件弯制加工新要求,具备良好的经济性和较优的市场推广价值㊂1㊀弯管机各运动轴控制要求图1所示为基于绕弯工艺的弯管机工作原理示意图㊂主要包含3个运动,①Y轴运动也称送料轴运动㊂是指管件由小车前端管夹夹持并跟随小车沿水平方向前移或后退的运动;②B轴运动也称转角轴运动㊂是指小车前端管夹夹持管件以Y轴为轴线进行的空间旋转运动;③C轴运动也称弯管轴运动㊂是指弯管机主模和弯曲模绕模中心进行的旋转运动㊂其中,弯曲模半径决定管件的弯曲半径㊂送料Y轴㊁转角B轴㊁弯管C轴,是弯管机3个主要运动轴,在该系统中均采用交流伺服系统进行半闭环控制㊂主模㊁随动模㊁导模等沿L1㊁L2方向的辅助弯管动作控制,由弯管机液压系统驱动控制㊂图1㊀弯管机工作原理图弯管前,Y轴前行送料至位,B轴转角至位,主模与弯曲模配合夹紧管件;弯管时,主模和弯曲模带动被夹紧的管件一起绕弯曲模中心进行C轴旋转;同时,Y轴同步前行,随动模㊁导模同步前推㊂通过控制C轴的旋转角度,可形成半径固定㊁角度不同的弯度㊂由此,系统对各运动轴的核心控制要求是:能实现对送料Y轴㊁转角B轴㊁弯管C轴3个运动轴快速㊁可靠㊁精确的位置控制,弯管时水平前行的送料Y轴与旋转的弯管C轴的同步协调控制,以及各运动轴的合理逻辑控制㊂2㊀控制系统硬件设计该控制系统包括上位机和下位机两大部分,其硬件设计框图如图2所示㊂图2㊀硬件设计框图㊀㊀上位机采用内嵌MCGS组态软件的触摸屏,主要实现系统人机交互和监控功能;下位机以埃斯顿ES⁃Motion⁃NGEV⁃211⁃B0型运动控制器为核心,与上位机通过MODBUS总线通信;多轴交流伺服系统由2台伺服驱动器+3台伺服电机组成,所有的伺服驱动器均通过CANopen总线与运动控制器进行通信㊂ETS⁃1010APC⁃CAN型伺服驱动器同时驱动两轴伺服电机,用于送料Y轴与转角B轴的驱动㊂这种一对二的双轴伺服驱动器较一对一的单轴伺服驱动器既明显节省了安装空间,又充分利用了处理芯片资源,性价比高㊂弯管C轴的运动则由ProNet⁃E⁃30D型伺服驱动器驱动㊂外部的数字量输入输出信号,分别通过J1㊁J2端子和HSF16P㊁HSF04P接口板直接与运动控制器㊁NGMIO模块相连㊂3㊀VTB程序设计简介该控制系统的控制核心是NGEV型运动控制器,该控制器具有一个主/从CANopen,支持DS301⁃DS401⁃DS402协议,程序设计支持VTB集成开发环境㊂3 1㊀VTB简介VTB(VisualToolBasic)是一种面向对象编程的集成开发环境,采用Windows的图形化交互界面,整合了一个大的对象和函数库,内含开发应用所需的所有工具,能通过编写更少的源代码实现快速开发应㊃451㊃机床与液压第47卷用,以及CANopen㊁EtherCAT㊁MODBUS等现场总线的便捷使用[8]㊂在VTB的Project工程管理器界面,可以快速选择和导航工程中所有页面㊂在Project相对应的树视图中,对应有两大部分,第一部分用于定义程序中使用的变量,另一部分作为任务管理,用于实现不同任务对应的程序设计㊂VTB提供了中断任务和合作任务两种任务类型㊂中断任务优先级高,可以以固定频率打断合作任务后执行㊂中断任务包括任务PLC(TaskPLC)与任务时间工作(TaskTime),任务PLC主要用于快速和精确的任务管理,优先级最高,不能被其他任何任务中断㊂因此,根据功能实现的需要,在本弯管机控制系统设计中,将I/O点扫描作为TaskPLC任务,具有最高中断优先级;运动控制器与上位机触摸屏的通信由MODBUS_RTU对象实现,作为TaskTime任务,具有次中断优先级㊂控制系统中其他工作列为合作任务,合作任务包含页面任务(Page)与主任务(Main),均为逐个顺序执行㊂3 2㊀VTB配置采用VTB编写程序前,首先需在VTB环境下完成几种配置的设置㊂(1)系统配置㊂根据硬件系统进行运动控制器㊁总线通信协议设置,如图3㊁4所示㊂图3㊀运动控制器VTB配置图4㊀总线协议VTB设置(2)Objects对象配置,设置对象的主要参数㊂该控制系统程序设计中,需配置的对象包括:驱动送料Y轴与转角B轴的ETS⁃1010APC⁃CAN伺服驱动器,类对象为Estun_ETS vco;驱动弯管C轴的ProNet⁃E⁃30D伺服驱动器,类对象为CiADS402;用于实现运动控制器与上位机触摸屏之间通信的MODBUS总线,类对象为ModbusRTU㊂在VTB中,通过浏览器的方式配置对象,会同时将包含对象参数名和参数值的参数表格自动地加载到系统内部的闪存[9]㊂(3)CANopen网络配置,用以明确从站节点数量和拟通过PDO交换的数据内容㊂VTB中内含一个CANopen配置软件,可以方便快捷地完成系统CANo⁃pen网络配置㊂需注意的是,从站设备所允许配置的PDO由设备硬件决定,即由设备EDS文件描述决定,与VTB中的CANopen配置软件无关㊂因此,CANo⁃pen网络配置前,必须保证用于描述或定义从站设备属性的标准EDS文件已被正确安装㊂该系统运动控制器为主站,用于配置从站节点㊁管理网络㊁控制从站节点状态转移以及监控从站节点心跳报文㊂从站节点有2个,ProNet伺服驱动器用于驱动弯管C轴,节点地址为1;ETS伺服驱动器用于驱动送料Y轴和转角B轴,节点地址为2㊂CANopen网络拓扑图如图5所示㊂图5㊀CANopen网络拓扑图CANopen网络配置内容包括:从站节点,每一节点下TIMEOUT参数㊁PDO(RPDO㊁TPDO)参数㊁Parameters参数等㊂其中,TIMEOUT参数用于规定主站进行从站初始化的次数和每次初始化的用时,主站通过多次规定时间内的初始化工作,可以避免从站设备未来得及被配置的情况发生;PDO配置是CAN⁃open网络配置的重要内容,影响整个网络的使用效果[10]㊂PDO所需设置的参数有Modo(PDO工作模式)㊁COB⁃ID(通信参数索引)以及映射对象㊂图6所示为TPDO配置界面,COB⁃ID值由CANopen配置软件自动设置㊂右侧区域显示的Z_statuswor(16)㊁Z_positionactualvalue(32)是当前PDO映射的对象名称和位数㊂若需查看映射对象的具体内容,双击对象名称即可㊂㊃551㊃第23期孙松丽等:基于CANopen总线的弯管机多轴运动控制系统设计与实现㊀㊀㊀图6㊀PDO配置主界面图7所示为CANopen网络配置主界面,表1为CiADS402节点CANopen配置的主要参数表㊂图7㊀CANopen网络配置主界面表1㊀CiADS402节点CANopen配置参数表(节点地址为1)参数名称参数内容设定内容1设定内容2备注2TIMEOUTrepeatnumber5repeattime500msPDO_TX1modefastbyte/Cob_id181hZ_statusword6041h,0h16bits弯管C轴状态字Z_positionactualvalue6064h,0h32bits弯管C轴实时位置PDO_RX1modefastbyte6COB_ID201hZ_controlword6040h,0h16bits弯管C轴控制字Z_target_position607Ah,0h32bits弯管C轴目标位置PDO_RX2modefastbyte4COB_ID301hZ_profilevelocity6081h,0h16bits弯管C轴目标速度parameterProfile_acceleration6083h,0h50000弯管C轴加速度Profile_deceleration6084h,0h50000弯管C轴减速度Homingmethod6098h,0h17弯管C轴回零模式Speedduringsearchforswitch6099h,1h1000弯管轴限位开关搜索速度4㊀单轴伺服定位运动控制实现通过CANopen总线实现伺服系统定位运动控制,一般控制流程是:首先改变伺服状态机状态,使其进入伺服使能,然后通过SDO设置伺服系统工作模式,再通过PDO发送目标位置和目标速度,最后通过PDO发送控制字启动电机㊂4 1㊀状态机状态机用于规定从站设备初始化时,如何按固定流程从一个状态转移到另一个状态㊂伺服驱动器作为该系统CANopen网络中具有单独节点地址的从站设备,不能自行进行状态转移,必须由主控设备控制进行㊂因此,该系统伺服驱动器的状态转移依靠运动控㊃651㊃机床与液压第47卷制器向其发送的控制字(Controlword)来实现㊂图8所示为DS402协议下状态机状态转移流程㊂状态机分成主电关闭(PowerDisabled)㊁主电打开(PowerEnabled)和Fault3个部分㊂所有状态在发生报警后均进入Fault[11]㊂上电后在进入(1)SwitchonDisable状态时,可以进行CAN通信,配置驱动器,但主电关闭,电机没有被励磁㊂经过(2)㊁(3)㊁(4)后,进入OperationEnable状态,伺服驱动器伺服使能㊂图8㊀DS402状态机图[12]4 2㊀控制字Controlword和状态字Statusword通过CANopen总线控制伺服系统运动,必须掌握配合使用控制字和状态字来控制和了解从站节点设备的状态机[13]㊂其中,控制字用于控制状态机进行状态转移,在对象字典中的索引为6040h,无子索引,通过向伺服驱动器6040h参数写入不同值的控制字,即可改变其工作状态㊂状态字用于显示状态机所处状态信息,在对象字典中的索引是6041h,无子索引,通过读取6041h的参数值,即可了解伺服驱动器状态机所处状态㊂4 3㊀伺服使能如前所述,通过发送控制字和确认状态字,改变伺服驱动器状态机状态,使其进入Operationenable伺服使能状态㊂下面以送料轴伺服使能为例,进行程序设计说明㊂functionaxisenable_x()asvoid/∗送料Y轴使能函数∗/selectenablestep_xcase0x_controlword=128if((x_statusword&0x4f)=0x40)enablestep_x=1endifcase1x_controlword=6if((x_statusword&0x6f)=0x21)enablestep_x=2endifcase2x_controlword=7if((x_statusword&0x6f)=0x23)enablestep_x=3endifcase3x_controlword=15if((x_statusword&0x6f)=0x27)enablestep_x=4endifendselectendfunction4 4㊀定位控制ProNet/EDS/ETS伺服驱动器目前支持CANopenDSP402中的位置㊁速度㊁转矩㊁回零㊁位置插补共5种运动控制模式,通过索引为6060h的modesofoperation参数变量可以进行具体工作模式的设置,并可通过索引为6061h的modesofoperationdisplay参数变量进行查询㊂该控制系统中的轴运动方式主要为位置模式㊁回零模式㊂确定伺服使能成功后,即可启动定位控制㊂先通过发送SDO,将伺服控制模式设置为位置模式,再发送位置和速度对应的PDO数据,再发送启动控制字即可控制伺服电机按目标速度㊁目标位置运行㊂(1)发送SDO,将工作模式设置为位置模式㊂在VTB环境下,调用VTB函数pxco_sdodl(2,0x6060,0,1,value()),则可完成轴控制模式的修改㊂函数参数中,2表示节点地址,0x6060为控制模式参数索引,0为子索引,数据1表示将AX1轴(送料轴)控制模式设置为位置模式㊂(2)通过PDO,发送位置和速度数据位置和速度参数值用提前定义好的变量表示,并确定好计算公式㊂例如,x_target_position是表示送料Y轴目标位置的变量,它等于Y轴的当前位置与人机交互界面输入的下一弯直线段长度之和㊂sendpos_coe变量表示位置单位换算因子㊂x_target_position=x_position_actual_value+Auto_SendLongth∗sendpos_coe㊃751㊃第23期孙松丽等:基于CANopen总线的弯管机多轴运动控制系统设计与实现㊀㊀㊀x_profile_velocity=Manu_SendSpeed∗sendspeed_coe(3)发送控制字x_controlword为0x1f时表示轴启动运行;x_con⁃trolword为0x10f表示轴停止运行㊂上面提及的单位换算因子是按照ESTUN伺服驱动器与VTB使用要求而设置㊂主要目的是为了在软件程序设计时建立好转速㊁位置等执行机构对应使用的单位(用户单位)与驱动器内部单位之间的单位换算系数,以实现两个不同单位之间的匹配,便于用户在操作使用弯管机时更快捷地完成相关参数设置㊂例如,本弯管机控制系统上位机人机交互界面参数设置时对应使用的直线位移单位是mm,而伺服驱动器内部规定的位移单位为increment(脉冲),两者之间即存在换算关系㊂因此,在进行程序设计时,应根据系统设计和配置提前计算好单位换算因子的值㊂5㊀双轴伺服同步协调控制由上述弯管机控制要求可知,弯管时,随着弯管C轴的旋转,Y轴送料小车需同步前行㊂即弯曲模旋转的线速度与Y轴前行的线速度须一致,保持同步性㊂解决Y轴与C轴同步性的一般方法是:弯管之前,撤消Y轴使能;弯管过程中,由被主模与弯曲模夹紧的管材拖动Y轴送料小车前行;弯管结束后,在主模与弯曲模夹紧解除后,再对Y轴上使能,Y轴主动前行完成下一弯的送料㊂在这种方式下,弯管时,管件承受一定的轴向拉力,对管件质量尤其是薄壁管件质量产生隐患㊂针对此问题,经实验验证后,对弯管时C轴与Y轴线速度同步采用了 双轴速度主从同步控制+驱动器转矩限制 相结合的控制实现方式,弯管C轴为主动轴,送料Y轴为从动轴㊂在这种方式下,Y轴电机速度给定值来自于C轴电机的速度反馈值,C轴电机受到负载扰动或出现速度突变时,Y轴电机可以随时跟踪变化,满足电机同步跟随需要,具有良好的跟随性,同步精度得以保证[14]㊂同时,通过设置驱动器参数Pn403=30,Pn404=30,将从动Y轴伺服电机正转和反转扭矩外部限制设定为额定转矩的30%㊂这样,当两轴同步情况良好时,Y轴送料小车以主动跟随方式送料;当C轴速度高于Y轴时,Y轴送料小车以主动跟随+被动拖动相结合的方式送料;当C轴速度低于Y轴速度时,Y轴由于有输出转矩限制,电机输出功率不会持续上升,从而避免系统频繁报警停机,使系统可以连续可靠运行㊂6㊀系统调试与验证对基于上述控制原理设计开发的弯管机控制系统,通过弯制加工一款家具座椅支架进行了验证㊂图9为座椅支架三维设计图㊂图9㊀座椅支架三维设计图基于CANopen总线的伺服控制系统,在进行系统调试时,首先应完成CANopen总线通信参数的设置,以确保系统正常通信㊂CANopen总线通信参数设置包含两部分:一是主站的运动控制器参数设置,已在VTB环境下通过系统配置完成;二是从站的伺服驱动器参数设置,主要通过驱动器面板操作设置完成㊂此处以ETS伺服驱动器为例,对需设置的参数及参数值进行说明,见表2㊂表2㊀ETS⁃1010APC⁃CAN伺服驱动器主要参数设置序号参数号名称及说明A轴(送料)B轴(转角)1Pn840 2电机功率等级选择332Pn005 3电机型号103Pn006 0总线类型选择334Pn703CAN通信速率445Pn704CAN通信节点226Pn403正转扭矩外部限制307Pn404反转扭矩外部限制308Pn510将输入信号分配至端口76549Pn513总线控制输入接点高位使能110010Pn100 0用户手动增益0011Pn102速度环增益40040012Pn104位置环增益8080㊀㊀系统通信正常后按照座椅骨架三维设计图,在人机交互界面下,按照管路Y(送料长度)㊁B(空间转角)㊁C(弯管角度)各参数进行参数值输入,同时应指定弯管时各弯对应弯曲模号(该系统为二层弯管模结构),参数编程输入界面如图10所示㊂最终弯制成品如图11所示,效果良好㊂㊃851㊃机床与液压第47卷图10㊀管件参数输入的人机交互界面图11㊀㊀弯制实物7㊀结论以弯管机多运动轴机械结构为基础,基于CANo⁃pen总线,按照VTB程序设计流程,介绍了VTB环境下的多种配置方法,对与运动控制实现高度相关的状态机状态转移控制进行了程序设计,明确了以ESmotion运动控制器为控制核心㊁基于CANopen总线协议的单轴运动控制实现路径㊂同时,针对弯管机送料Y轴与弯管C轴的同步协调控制要求,提出了双轴速度主从同步控制与驱动器转矩限制相结合的控制方法㊂整个系统经实例验证,证明其效果良好㊂参考文献:[1]HESC,HUANGDG,FENGDW,etal.DevelopmentofCAD/CAMSystemforPC⁃basedCNCPipeBenderMa⁃chine[C]//Proceedingof2008IEEEInternationalConfer⁃enceonMechatronicsandAutomation.Takamatsu,2008:455-460.[2]王玮.永磁交流伺服系统网络化多轴驱动的关键技术研究[D].杭州:浙江理工大学,2015.[3]周凯.基于实时以太网的高性能多轴数控系统[J].制造技术与机床,2011(3):157-161.ZHOUK.High⁃performanceMulti⁃axisNCSystemBasedonReal⁃timeEthernet[J].ManufacturingTechnology&MachineTool,2011(3):157-161.[4]曾武.CANopen协议在伺服控制系统中的应用研究[D].湘潭:湘潭大学,2014.[5][德]HOLGERZELTWANGER.现场总线CANopen设计与应用[M].周立功,黄晓清,严寒亮,译.北京:北京航空航天大学出版社,2011.[6]高豹江.基于FPGA的四轴伺服控制系统的设计[D].哈尔滨:哈尔滨理工大学,2015.[7]王伟,曾宪献,刘海燕.现场总线技术现代化工厂的应用[J].装备制造技术,2014(5):235-237.WANGW,ZENGXX,LIUHY.ApplicationofFieldbusTechnologyinModernChemicalPlant[J].EquipmentManufacturingTechnology,2014(5):235-237.[8]PROMAXSRL.NextGenerationSystemNGMEV0UserManual(Rev.1.00.01)[Z]http://www.promax.it.[9]PROMAXSRL.Italy,VTB⁃VisualToolBasicGuideObjects(Rev.1.0.0)[Z].2013,http://www.promax.it.[10]段建民,焦圣伟,徐喆.CANopen协议栈PDO的配置方法研究[C]//中国仪器仪表学会2008年学术年会暨第二届智能检测控制技术及仪表装置发展研讨会.北京,2008.[11]邓遵义,宁祎.CANopen协议剖析及其在伺服电机控制中的实现[J].机电工程,2008,24(8):39-41.DENGZY,NINGY.AnalysisofCANopenandImple⁃mentationintheControlofServomotor[J].Mechanical&ElectricalEngineeringMagazine,2008,24(8):39-41.[12]CIA.DSP402V2.0-CANopenDeviceProfileforDrivesandMotionControl[S].CANinAutomationeV,1998.[13]ESTUN伺服CANopen用户手册V1.01版[Z].南京埃斯顿自动控制技术有限公司.2015-12-28.[14]李岩明.铝管成型机的多伺服电机同步控制研究[D].沈阳:沈阳理工大学,2013.(责任编辑:卢文辉)㊃951㊃第23期孙松丽等:基于CANopen总线的弯管机多轴运动控制系统设计与实现㊀㊀㊀。
基于CANopen协议的分布式控制系统的研究的开题报告1.研究背景和意义CANopen作为一种现代化的分布式控制系统协议,已经成为了工业控制领域的重要组成部分。
该协议具有高速、高可靠性、简单灵活等特点,在各种工业自动化场合得到了广泛应用。
随着工业自动化技术的发展,分布式控制系统在模块化、智能化、网络化方面的应用需求越来越高,因此,在CANopen协议的基础上研究分布式控制系统的设计、开发和应用,具有非常重要的实际意义。
2.研究目标和内容研究目标:基于CANopen协议的分布式控制系统的设计、开发和应用,提高系统的稳定性和可靠性,为工业自动化提供高效的分布式控制系统解决方案。
研究内容:1)CANopen协议的分析和应用。
2)分布式控制系统的设计和开发。
3)系统软硬件设计,包括微处理器的选择、架构设计和相关软硬件接口设计等。
4)系统的实现和测试,包括系统的集成测试和性能测试等。
5)系统的应用和推广,为工业控制系统提供高效、稳定的控制方案。
3.研究方法和步骤研究方法:文献资料调研、理论分析、系统设计、硬件调试、实验测试等。
研究步骤:1)了解CANopen协议的基本原理和应用领域。
2)确定研究内容和项目要求。
3)进行系统软硬件架构设计和开发。
4)进行系统功能测试和性能测试。
5)根据测试结果对系统进行优化和改进,保证系统的稳定性和可靠性。
6)撰写论文和报告,对研究成果进行总结和归纳。
4.预期成果1)基于CANopen协议的分布式控制系统的设计和实现,可以用于工业自动化领域。
2)通过对系统的功能、性能、稳定性等方面的测试,分析系统的优缺点,进行改进和优化;并总结出一套可行的分布式控制系统设计方法。
3)为CANopen协议的应用和分布式控制系统的研究提供一定的参考。
5.研究难点和创新点研究难点:分布式控制系统的设计和实现。
创新点:通过CANopen协议的应用,可以大大提高系统的稳定性和可靠性。
同时,本研究还将探索适用于分布式控制系统的新型设计方法和优化方案。
基于CANOPEN的过程控制系统的设计的开题报告一、选题背景及意义随着工业自动化的不断发展,过程控制系统已经成为现代工厂正常运行的重要组成部分。
CANOPEN作为一种现代化的控制总线技术,具有较高的稳定性、可靠性和高效性,因此在过程控制系统设计中得到了广泛应用。
本次选题旨在基于CANOPEN技术对过程控制系统进行设计,构建一个高可靠性和高性能的过程控制系统,提高生产效率和质量,降低成本,有着重要的实际意义。
二、研究内容及技术路线本次研究的内容主要包括以下几个方面:1. CANOPEN总线技术的研究与应用:研究CANOPEN技术的结构和原理,尤其是在过程控制系统中的应用,掌握CANOPEN通讯协议和通讯方式;2. 过程控制系统软件平台的设计:研究过程控制系统软件平台的架构设计,包括数据采集、控制、操作界面等模块的设计和实现;3. 过程控制系统硬件设计:研究过程控制系统硬件平台的选型和设计,包括传感器、执行器、控制器等模块的选型和设计;4. 过程控制系统集成实现:将软件平台和硬件平台进行集成实现,进行整体测试和调试,验证系统的可靠性和稳定性。
技术路线如下:1. 研究CANOPEN技术的相关企业标准和技术规范,掌握通信协议和通信方式;2. 设计过程控制系统的软件平台,实现数据采集、控制、操作等模块,并进行相关测试和验证;3. 根据设计需求选取合适的硬件平台,进行传感器、执行器、控制器等模块的选型与设计并进行相关测试和验证;4. 将软件平台和硬件平台进行集成实现,进行整体测试和调试,验证系统的可靠性和稳定性。
三、预期成果本次研究预期实现一个基于CANOPEN技术的高可靠性和高性能的过程控制系统,具体成果包括:1. CANOPEN技术在过程控制系统中的应用,掌握CANOPEN通信协议和通信方式;2. 过程控制系统软件平台的架构设计和实现,包括数据采集、控制、操作界面等模块的设计和实现;3. 过程控制系统硬件平台的选型和设计,包括传感器、执行器、控制器等模块的选型和设计;4. 集成软、硬件平台实现的过程控制系统,验证系统的可靠性和稳定性。
基于CANopen协议的AGV多轮驱动控制系统摘要:针对AGV多轮驱动控制系统存在接线复杂、成本较高、可靠性差等方面的问题,提出了一种基于CAN open 协议的AGV多轮驱动控制系统的设计方案。
结合物流行业低压伺服系统CAN总线的普及应用,分析并采用CAN总线的高层CANopen协议,实现了AGV多轮驱动系统的控制,将其用于AGV四轮驱动系统实验平台。
结果表明,该系统结构简单、性能稳定、可靠、适应性强。
关键词:AGV;多轮驱动;控制系统;CANopen1 引言随着现代科学与技术的飞速发展,自动引导车(AGV)在机械加工、汽车制造、自动化立体仓库等许多行业中得到了广泛应用。
AGV(Automated Guided Vehicle)即自动导引车,是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶的运输小车,并且还具有安全保护报警功能和相应移载功能。
AGV的工作特点要求控制系统应具备电机多轴控制、多传感器数据实时采集与处理、与上位机数据交换等功能。
本文设计了一种新型的基于CANopen协议的AGV多轮驱动控制系统,采用CANopen协议实现AGV多轮驱动系统的控制,在AGV行业将会有广泛的应用前景。
2 CANopen 控制协议的实现CAL(CAN Application Layer)协议是目前基于CAN的高层通讯协议中的一种,CANopen是在CAL基础上开发的,使用了CAL通讯和服务协议子集,提供了分布式控制系统的一种实现方案。
这里选用的电机驱动器是标准支持该协议的上位机的CAN从站设备,严格遵循CANopen2.0A/B协议,任何支持该协议的上位机均可以与其进行通讯。
CANopen通讯定义了四种通讯报文,分别是:服务数据对象SDO(Service Data Objects)、进程数据对象PDO(Process Data Objects)、管理报文NMT和预定义报文。
2.1 对象字典(OD)CANopen的核心概念是设备对象字典,所有的对象有明确的功能定义。
基于CANopen协议多轴联动系统设计与研究
景军锋,赵永涛
(西安工程大学电子信息学院,710048)
摘要:以以色列Elmo公司伺服SIMPLIQ系列产品作为研究对象,利用独立型的运动控制器maestro,Elmo专用数字伺服驱动器Bassoon,配备的直流无刷电机,以及海泰克人机界面设计多轴联动伺服系统,最后详细的描述了速度运行模式并给予简单的例程,在实际应用中该技术具有广阔的推广应用前景。
关键词: CANopen 多轴伺服系统
Abstract: Multi-Axis linkage servo system will be designed ,with Israeli Elmo company servo SIMPLIQ series products as the research object, such as the independent model of motion controller MAESTRO, Elmo special digital servo driver Bassoon, equipped with DC brushless motor, and Hitech HMI. Finally, detailed describes the speed operation mode and give simple routines. In the actual application , this technology has broad application prospect.
Key words: CANopen Multi-Axis servo system
前言: CAN总线是一种标准的高性能
开放性高可靠性和低成本的现场总
线,通过CAN总线的方式控制伺服系
统,不仅能更好地满足现代自动化的
运动控制要求,而且在硬件连接方面
也更加灵活,可靠。
同时,数字信号
处理技术的发展,是的伺服驱动器愈
加智能化、便捷化,繁琐复杂的控制
任务均可在驱动器中处理。
综合利用
CAN总线,多轴管理器,数字伺服驱动
器,以及人机界面设计网络分布式控
制体系,可以在伺服性能上得到很大
程度的提高
1、多轴系统的搭建
多轴联动系统主要在基于CANopen 协议的基础上,由PC 机、海泰克人机界面HMI(型号PWS6A00-T),Elmo公司生产的以DSP为核心的maestro控制器,数字伺服驱动Bassoon以及无刷直流电机搭建而成。
如图1-1所示
控制器maestro为本系统的控制核心,它主要由以下5个模块构成,如图1-2所示:
图1-1 基于CANopen的多轴联动系统
(1)通信模块(HOST communication services):主要由RS232通信模块、局域网Ethernet模块、HOST API、远程控制Telnet模块、广域网WEB模块,转换网关Gateway模块等部分构成,负责与外部通信。
(2)行命令编译模块(command line interpreter ):负责编译通过maestro或者SIMPLIQ针对单轴所发出的立即执行的行命令。
(3)内核模块(kernel):负责执行用户程序。
(4)运动管理模块(motion manager):发送命令到各轴并接受他们反馈的信
息,以便于协调各州之间的运动。
(5)CAN总线模块(CAN Network communication server):主要包括CAN 总线通信模块、CANopen协议及CAN总线编程接口。
主要负责与CAN网络通信。
数字伺服驱动器Bassoon ,具有智能化设计,其内核为摩托罗拉生产的16位专用电机控制芯片,不仅具有支持直接连接PC机单轴独立编程功能,而且支持以CANopen连接网络为基础的多轴控制,智能性较高,环境适应能力较强。
在本系统中,Bassoon 通过电源线及主反馈编码线与无刷直流电机连接,并且通过CAN总线接入控制网络,基于CANopen协议,接受上位机maestro命令及向其反馈电机运转的各项参数。
人机界面选用海泰克生产的型号为PWS6A00的10.4寸彩色触摸屏,分辨率为 640x480 像素,按键包括 1 个清单键和 7 个使用者定义的功能键。
可使用Windows系统所有字体,各组件可定义不同字体。
多语言功能,在同一程序中同时支持5种语言,支持BMP JPG GIF格式的图片。
历史数据、配方、报警记录,程序可以即时保存到CF卡或U盘,方便保存。
USB
Master\Device 可进行USB上下载程序,连接USB打印机。
ADP软件人性化的编程环境,功能更强大,使用更简单,支持宏指令编程,可以大大简化用户编程。
2、软件的实现的优越性
Elmo公司为maestro配置有专用的开发工具,主要包括composer、Elmo studio、Multi-Axis recorder、Application Editor,其中composer 主要提供五种运行模式下的行命令界面,即转矩控制,速度控制、微步进、双反馈位置控制、单反馈位置控制。
并带有motion monitor监控器监控电机运转时的各项参数,scope显示界面以及提供进入其他三个软件的路径。
Elmo studio为用户提供编写、编译、执行程序的环境,程序语言类似于C 语言,容易理解,且功能强大。
Multi-Axis recorder 主要用于记录运行位置与速度在时间轴上的曲线,也可以设置成其他变量。
Application Editor主要用于编辑增益调试过后生成的应用文件。
触摸屏的编程,使用ADP6.0软件,采用“所见即所得’先进概念,使用者可以看到画面设计的实际效果。
软件界面人性化,功能强大,元件库丰富且支持用户编辑,支持离线模拟及在线模拟功能。
3、速度控制模式下简单例程
在配线正确及连接无误的情况下,先用RS232连接PC机与Basssoon驱动器,利用composer软件的行命令(PP[13])设置,各驱动器的CAN网络节点,避免节点重复,造成通信故障,然后将各个驱动器及MAESTRO控制器用CAN总线连接组成网络式分布。
利用以太网将MAESTRO与PC机相连,使用Elmo studio软件编写用户程序,并下载到控制器中。
使用RS232及海泰克专用下载线将PC机上编好的画面下载到人机界面,并用RS232接到控制器上,实现通信。
用户示例程序如下:
ADP的画面如图3-1所示
:
4、结束语
CANopen协议的优越性使得其应用愈加广泛,产品开发周期缩短。
在伺服系统中,CANopen的标准性、高性能、
高可靠性、低成本性使组建控制网络
更加便捷化,同时缩短了伺服电机的响应时间,提高了生产的成品的合格率,节约生产成本,减少了维修费用。
参考文献
[1] 邓遵义,宁祎. CANopen协议剖析及其在伺服电机控制中的实现[J].机电工程, 2007, 24(8): 39-41
[2]Command Reference Manual.天津罗升公司.2008
[3]Mastro software manual.天津罗升公司.2008
[4]邬宽明. CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社, 1996.
[5]H.Boterenbrood.CANopen high -level protocol forCAN-bus[C].
NIKHFF InternalDocumentation, 2000, (9).
. .。