并网逆变器的电流控制方法
- 格式:doc
- 大小:1.26 MB
- 文档页数:18

光伏电站并网逆变器功率控制光伏电站并网逆变器功率控制是光伏发电系统中一个重要的技术环节。
它的作用是将太阳能光伏板所产生的直流电转换为交流电,并输出到电网中供用户使用。
在光伏电站中,逆变器是一个核心设备,它具有功率控制的功能,能够根据光伏板的输出功率、电网的负荷情况以及系统的安全性要求等因素,动态地调整逆变器的功率输出,以保证系统的运行稳定和安全。
本文将对光伏电站并网逆变器功率控制的原理和方法进行探讨。
一、光伏电站的运行原理在光伏电站中,光伏板接收太阳能辐射,将太阳能转化为电能。
由于光伏板的输出是直流电,而电网需要的是交流电,因此需要使用逆变器将直流电转换为交流电,并将其输出到电网中。
光伏电站的运行非常依赖于光照强度和太阳的角度。
当太阳照射光伏板时,光子会与光伏板上的半导体材料发生光电效应,产生电子-空穴对。
通过将这些电子-空穴对引导到电池片中,就可以形成电流。
这就是光伏板产生电能的基本原理。
二、光伏电站并网逆变器功率控制的意义光伏电站并网逆变器功率控制在光伏发电系统中具有重要的意义。
它能够根据光伏板的输出功率和电网的负荷情况,动态地调整逆变器的功率输出。
这样可以确保光伏电站对电网的稳定供电,并能够将多余的电能注入到电网中。
另外,光伏电站并网逆变器功率控制还能够提高系统的安全性,避免超载和故障等问题的发生。
三、光伏电站并网逆变器功率控制的方法光伏电站并网逆变器功率控制的方法主要包括响应式功率控制和主动功率控制两种。
响应式功率控制是根据电网电压和频率的变化来调节逆变器的输出功率。
当电网电压或频率发生变化时,逆变器能够根据这些变化自动调整输出功率,以保证光伏电站对电网的稳定供电。
这种方法的优点是实现简单、成本低,但其响应速度相对较慢。
主动功率控制是通过控制逆变器的工作方式和输出功率,来实现对光伏电站的功率控制。
在这种方法中,逆变器可以通过监测光伏板的输出功率和电网的负荷情况,来动态地调整逆变器的功率输出。
光伏并⽹逆变器控制有哪⼏种⽅法
光伏并⽹逆变器控制主要分直接电流控制、间接电流控制、功率控制,逆变器的主电路均需要有控制电路来实现,⼀般有⽅波和正弦波两种控制⽅式,⽅波输出的逆变电源电路简单,成本低,但效率低,谐波成份⼤。
正弦波输出是逆变器的发展趋势,随着微电⼦技术的发展,有PWM功能的微处理器也已问世,因此正弦波输出的逆变技术已经成熟。
1.⽅波输出的逆变器:⽅波输出的逆变器⽬前多采⽤脉宽调制集成电路,如SG3525,TL494等。
实践证明,采⽤SG3525集成电路,并采⽤功率场效应管作为开关功率元件,能实现性能价格⽐较⾼的逆变器,由于SG3525具有直接驱动功率场效应管的能⼒并具有内部基准源和运算放⼤器和⽋压保护功能,因此其外围电路很简单。
2.正弦波输出的逆变器:正弦波输出的逆变器控制集成电路,正弦波输出的逆变器,其控制电路可采⽤微处理器控制,如INTEL公司⽣产的80C196MC、摩托罗拉公司⽣产的MP16以及MI- CROCHIP公司⽣产的PIC16C73等,这些单⽚机均具有多路PWM发⽣器,并可设定上、下桥臂之间的死区时间,采⽤INTEL公司 80C196MC实现正弦波输出的电路,80C196MC完成正弦波信号的发⽣,并检测交流输出电压,实现稳压。
电路输出端⼀般采⽤LC电路滤除⾼频波,得到纯净的正正弦波。
光伏并网逆变器电流控制策略的研究
光伏并网逆变器电流控制策略是为了实现光伏发电系统与电网之间的
高效能转换和稳定的电能注入而进行的研究。
光伏并网逆变器是将光伏发
电系统输出的直流电能转换为交流电能并注入电网的装置,其电流控制策
略的优化能够提高系统的性能和稳定性。
1.电流控制器的设计:光伏并网逆变器必须能够根据电网的要求控制
输出电流的大小和波形。
传统的电流控制器采用PI控制器或者模糊控制器,但这种控制器在应对光伏输出电流瞬时变化较大的情况下容易产生误差。
因此,当前的研究主要集中在模型预测控制、自适应控制等非线性控
制策略的设计和实现。
2.电流调节策略的研究:为了满足电网对电流波形和功率因数的要求,需要对光伏并网逆变器的电流进行调节。
常见的调节策略有包络控制策略、直接电流控制策略和模糊控制策略等。
这些策略主要通过改变逆变器的控
制参数来实现对电流波形和功率因数的调节。
3.技术经济性的研究:光伏并网逆变器电流控制策略的研究还需要考
虑其对系统的技术经济性的影响。
比如,是否能够降低系统的成本、提高
系统的效率等。
为了实现这些目标,可以利用先进的控制算法和器件设计
来降低系统的能耗,提高系统的效率。
光伏并网逆变器电流控制策略是目前光伏发电系统中一个重要的研究
领域。
通过采用先进的控制策略,可以有效提高光伏并网逆变器的电流控
制性能,实现稳定的电能注入。
同时,可以降低系统运行的成本,提高系
统的技术经济性。
因此,对光伏并网逆变器电流控制策略的研究具有重要
的理论和实际意义。
并网逆变器输出电流滞环跟踪控制技术研究1. 本文概述随着可再生能源在全球能源结构中占据越来越重要的位置,如何高效地将这些能源并入电网成为了一个亟待解决的问题。
并网逆变器作为连接可再生能源与电网的关键设备,其性能直接影响到整个系统的稳定性和效率。
在众多并网逆变器控制技术中,输出电流的精确控制尤为重要,它不仅关系到电能质量,还影响到电网的稳定运行。
本文旨在深入研究并网逆变器的输出电流滞环跟踪控制技术。
本文将介绍并网逆变器的基本原理及其在电力系统中的作用。
接着,将详细阐述滞环跟踪控制技术的理论基础和关键优势,包括其在抑制谐波、提高系统响应速度和稳定性方面的贡献。
本文还将探讨该技术在实际应用中可能遇到的挑战和解决方案,以及如何通过优化算法进一步提升控制性能。
通过对现有文献的综述和理论分析,结合仿真实验和实际案例研究,本文期望为并网逆变器的控制技术提供新的见解,并为相关领域的研究者和工程师提供实用的参考和指导。
2. 并网逆变器基本原理并网逆变器是一种电力电子设备,它的主要功能是将直流电(DC)转换为交流电(AC),以便与电网系统并联运行。
在太阳能光伏系统、风力发电系统以及其他可再生能源系统中,逆变器是不可或缺的核心组件。
逆变器不仅负责电能的转换,还需要确保输出电流与电网电压同步,以实现有效的能量交换。
并网逆变器的工作原理基于开关电源技术,通过高频开关器件的快速开关动作,将直流电源转换成具有一定频率和幅值的交流电。
这些开关器件通常由晶体管、IGBT(绝缘栅双极晶体管)或其他半导体器件构成。
逆变器内部的控制系统根据电网电压的实时信息,调节开关器件的工作状态,以实现对输出电流的精确控制。
为了确保逆变器的输出电流能够与电网电压保持同步,通常采用一种称为“滞环控制”的技术。
滞环控制是一种简单而有效的电流控制策略,它通过设定两个电流幅值的界限(滞环上下界),来控制开关器件的导通和关断。
当输出电流超过上限时,逆变器会调整开关状态以减小电流当电流低于下限时,逆变器则会增加电流。
并网逆变器动态特性分析与电流稳定控制研究并网逆变器动态特性分析与电流稳定控制研究摘要:用于太阳能光伏发电系统的并网逆变器在电网中起着重要的作用。
本文旨在研究并网逆变器的动态特性以及电流稳定控制方法。
首先,本文介绍了并网逆变器的工作原理和主要组成部分。
然后,采用数学模型对并网逆变器进行建模,并通过仿真与实验验证模型的准确性。
接着,对并网逆变器的动态响应进行分析,包括开关频率响应、输出电压响应和输出电流响应等。
最后,本文提出了一种电流稳定控制方法,该方法基于PI控制器和电流反馈回路,实现了并网逆变器输出电流的稳定控制。
关键词:并网逆变器,动态特性,电流稳定控制1. 引言随着可再生能源的快速发展和能源转型的需求,太阳能光伏发电系统得到了越来越广泛的应用。
太阳能光伏发电系统中的关键设备之一是并网逆变器,其主要功能是将直流电能转化为交流电能并注入电网中。
实际工程中,要求并网逆变器具备较好的动态特性和电流稳定控制能力,以确保系统的可靠运行。
2. 并网逆变器的工作原理和结构并网逆变器主要由直流侧和交流侧两个部分组成。
其工作原理是:通过PWM技术控制开关器件的导通和断开,利用电感和电容的滤波作用,将直流电能转化为交流电能。
直流侧主要包括MPPT控制器、滤波电容和电感等;交流侧主要包括IGBT功率开关和输出线圈等。
3. 并网逆变器的数学模型为了对并网逆变器进行分析和控制,需要建立其数学模型。
本文采用时域法对并网逆变器进行建模,并利用MATLAB/Simulink软件进行仿真验证。
实验结果表明,所建立的数学模型能够准确地描述并网逆变器的动态特性。
4. 并网逆变器的动态响应通过对数学模型进行仿真和实验,本文对并网逆变器的动态响应进行了分析。
首先,分析了并网逆变器在不同开关频率下的响应情况。
结果表明,开关频率越高,逆变器的动态响应越好。
其次,分析了并网逆变器在不同工作条件下的输出电压响应和输出电流响应。
实验结果表明,输出电压和输出电流均能在短时间内达到稳定状态,且稳定性较好。
基于PI控制的三相光伏并网逆变器电流控制器设计一、本文概述随着全球对可再生能源的需求不断增长,光伏技术作为清洁、可持续的能源形式之一,已在全球范围内得到广泛应用。
三相光伏并网逆变器作为光伏系统的核心设备,其性能直接影响到光伏系统的发电效率和电能质量。
电流控制器作为三相光伏并网逆变器的重要组成部分,对于实现光伏系统的高效、稳定运行具有关键作用。
因此,研究并设计高效的三相光伏并网逆变器电流控制器具有重要意义。
本文旨在探讨基于PI控制的三相光伏并网逆变器电流控制器的设计。
PI控制作为一种常用的线性控制方法,具有结构简单、稳定性好、调节速度快等优点,在电力电子领域得到了广泛应用。
本文将首先介绍三相光伏并网逆变器的基本原理和结构,然后详细阐述基于PI控制的电流控制器设计过程,包括控制策略的选择、控制器的参数设计以及稳定性分析等。
通过实验验证所设计的电流控制器的有效性,并对其性能进行评估。
通过本文的研究,旨在提供一种基于PI控制的三相光伏并网逆变器电流控制器的设计方法,为光伏系统的优化和升级提供理论支持和技术指导。
本文的研究成果也有助于推动光伏技术的进一步发展,为实现全球能源结构的绿色转型做出贡献。
二、光伏并网逆变器基本原理光伏并网逆变器是太阳能光伏发电系统中的关键设备,其作用是将光伏电池板产生的直流电能转换为交流电能,并与公共电网同步连接,实现电能的并网供电。
光伏并网逆变器的基本原理可以分为以下几个步骤。
光伏电池板的工作原理:光伏电池板利用光电效应,将太阳光能直接转换为直流电能。
当太阳光照射到光伏电池板表面时,光子与电池板中的半导体材料相互作用,导致电子从原子中逸出,形成光生电流。
直流-直流(DC-DC)变换器:由于光伏电池板输出的直流电压随着光照条件和温度的变化而变化,因此需要通过DC-DC变换器将其转换为稳定的直流电压。
常见的DC-DC变换器有升压型(Boost)、降压型(Buck)和升降压型(Buck-Boost)等。
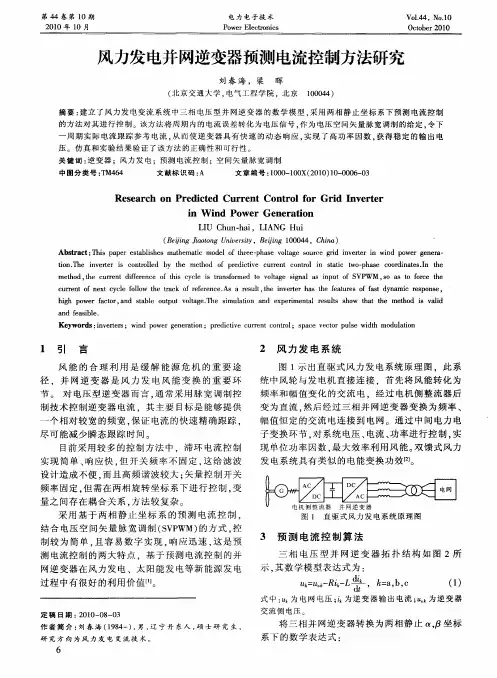
第27卷㊀第8期2023年8月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.8Aug.2023㊀㊀㊀㊀㊀㊀LLCL 滤波并网逆变器的改进型加权平均电流控制策略杨明1,㊀杨杰1,㊀赵铁英1,㊀郑晨2,㊀韦延方1(1.河南理工大学电气工程与自动化学院,河南焦作454003;2.河南省电力公司电力科学研究院,河南郑州450052)摘㊀要:加权平均电流(WAC )控制因其对并网逆变器固有的降阶特性而备受关注㊂然而,数字控制延时引起的系统反向谐振峰易导致传统WAC 控制失效,并网逆变器对弱电网下电网阻抗的适应范围减小㊂鉴于此,本文不从WAC 控制的降阶角度出发,而是通过逆变器与电网互联系统等效阻抗模型的网侧电流稳定性角度重新审视,提出一种采用LLCL 滤波并网逆变器的前馈复矢量滤波器改进型WAC 控制策略,用以提升并网逆变器等效输出阻抗在低频域的相位,可使其在奈奎斯特全频域内的相位均高于-90ʎ,进而增强系统的稳定性㊂最后,通过仿真分析验证了所提控制策略的有效性㊂关键词:加权平均电流控制;数字控制延时;反向谐振峰;等效阻抗模型;复矢量滤波器DOI :10.15938/j.emc.2023.08.012中图分类号:TM464文献标志码:A文章编号:1007-449X(2023)08-0109-13㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2021-04-24基金项目:国家自然科学基金(U1804143,61703144);河南理工大学青年骨干教师资助计划(2020XQG -18);河南省矿山电力电子装置与控制创新型科技团队基金(CXTD2017085)作者简介:杨㊀明(1982 ),男,博士,副教授,研究方向为新能源并网发电技术㊁电能质量控制等;杨㊀杰(1997 ),男,硕士研究生,研究方向为光伏并网逆变器控制技术;赵铁英(1977 ),女,博士,研究方向为电力系统状态监控及故障限流;郑㊀晨(1990 ),男,博士后,研究方向为光伏并网发电系统稳定性分析等;韦延方(1982 ),男,博士,副教授,研究方向为电力系统及其新型输配电的分析和控制㊂通信作者:杨㊀杰Improved weighted average current control strategy forLLCL connected invertersYANG Ming 1,㊀YANG Jie 1,㊀ZHAO Tieying 1,㊀ZHENG Chen 2,㊀WEI Yanfang 1(1.School of Electrical Engineering and Automation,Henan Polytechnic University,Jiaozuo 454003,China;2.State Grid Henan Electric Power Research Institute,Zhengzhou 450052,China)Abstract :The weighted average current (WAC)control strategy has attracted much attention because of its lower-order effect on grid-connected inverters.However,the system reverse resonant peak caused by digital control delay causes the traditional WAC control to fail,and the inverter s adaptation range to the grid impedance under the weak power grid is reduced.In view of this,this article does not proceed from the perspective of WAC control reduction,but re-examines it from the perspective of grid-side current sta-bility of the equivalent impedance model of the inverter and grid interconnection system.An improved WAC control strategy of feedforward complex vector filter using LLCL grid-connected inverter is proposed to improve the phase of the equivalent output impedance of the grid-connected inverter in the low-frequen-cy domain.It can make the phase in the full frequency domain of Nyquist higher than-90ʎ,thereby en-hancing the stability of the system.Finally,theoretical and simulation analysis verify the effectiveness ofthe proposed control strategy.Keywords:weighted average current control strategy;digital delay;reverse resonant peak;equivalent impedance model;complex vector filte0㊀引㊀言并网逆变器作为新能源分布式发电单元与电网之间的关键接口设备,其性能优劣对入网电能质量具有重要影响㊂由于逆变器机侧输出电压中含有大量的开关谐波,为满足并网要求,通常在逆变器输出端配置LCL滤波器[1-2]㊂然而,逆变器开关频率较低时,LCL滤波器对开关谐波的衰减效果较弱㊂相应地,LLCL滤波器近些年在并网逆变器的应用中备受关注㊂相较于LCL滤波器而言,LLCL滤波器多出了一条电容与电感的串联谐振支路,将该支路的谐振频率设置为开关频率,可对高频开关次谐波达到极强的衰减效果[3-4]㊂此外,在机侧电感相同的前提下,总电感量较LCL滤波器降低40%以上,串联谐振支路抗参数漂移能力强,适合于大规模生产[5]㊂通常,抑制LCL谐振尖峰的控制策略,同样适用于LLCL滤波器㊂对于并网逆变器的稳定性控制策略,已有诸多学者从不同角度进行分析,主要包括4个方面:1)电流控制器的改进:例如,文献[6-7]对传统比例积分电流控制器进行改进,提出光伏并网逆变器通用比例复数积分控制策略,该方法克服了电流控制器对系统低频增益与稳定裕度之间的矛盾,并且在较小的积分系数条件下即可达到足够高的基频增益,但在不同控制坐标系(如静止αβ坐标系和三相abc坐标系)下实现较为复杂;2)一次设计:例如,文献[8]从并网逆变器的一次设计出发,采用传统网侧电流反馈电容电流阻尼双环控制,考虑电网阻抗影响并设计 坚强的 光伏并网逆变器,然而该设计过程并未考虑数字控制延时对系统高频域的影响,当数字控制延时不可忽略时,该设计方法可能导致系统失稳;3)附加补偿装置:例如,文献[9-10]通过对逆变器与电网互联系统的等效阻抗模型推导,提出在公共耦合点处串联或并联附加整流装置的控制策略,该方法可有效抑制电网背景谐波并提高系统的稳定性,但附加装置不仅增大设备成本和体积,还需要额外配置滤波器,不利于广泛推广;4)相位补偿:例如,文献[11]通过在电网电压前馈通道串联相角补偿环节,实现并网逆变器的相角主动补偿控制,但补偿环节中的微分项难以在实际工程中直接实现;此外,文献[12]采用相位补偿与虚拟阻抗优化结合的控制策略,可实现阻尼特性的独立控制,但控制结构较为复杂㊂上述对并网逆变器的稳定性控制均为三阶系统,控制复杂度较大㊂近些年,关于并网逆变器的加权平均控制策略备受关注,主要包括两类:分裂滤波电容控制和加权平均电流控制㊂前一种控制策略对滤波器参数精度依赖性较大,当参数发生漂移时,该方法可能失效[13-14];加权平均电流控制策略是一种对机侧电流和网侧电流进行加权反馈的间接控制策略,因其特有的降阶特性而受到广泛应用[15-16]㊂文献[17]考虑电网电压前馈影响,对传统加权平均电流控制的加权系数计算方法进行改进,可将控制系统从三阶降为与电网阻抗无关的一阶系统,极大地增强了并网逆变器在弱电网条件下的鲁棒性,然而该控制策略并未考虑数字控制延时的影响㊂事实上,当并网逆变器采用数字控制时,数字控制延时的影响不可忽略㊂文献[18]参考了文献[17]中对加权系数的计算方法,分析表明,数字控制延时的存在会引起系统产生一个附加反向谐振峰,该谐振峰在弱电网下随着电网阻抗的变化而发生偏移,导致系统稳定裕度降低甚至失稳,鉴于此,提出在电网电压前馈串联超前补偿器用以提升系统稳定裕度,却无法保证电网阻抗宽范围变化时系统均具有足够的稳定裕度㊂同时,为了降低加权控制中无源阻尼产生的功率损耗,文献[19]采用电容电流有源阻尼进行加权平均电流控制,通过附加补偿环节来改善有源阻尼带来的额外自由度,但该方法需要在补偿环节中产生一拍延时,实现较为困难㊂综上所述,现有的加权平均电流控制策略对系统稳定性提升仍存在一定的局限性,并且都是从电流环控制角度出发㊂鉴于此,本文以LLCL滤波并网逆变器与电网互联系统的等效阻抗模型出发,不再以降阶角度进行分析,而是从网侧电流稳定性角度重新审视,提出一种基于前馈复矢量滤波器的改进型加权平均电流控制策略,并给出参数的详细设计过程,以此来提高并网逆变器的稳定性㊂理论和仿真验证表明,所提控制策略可保证并网逆变器在电网阻抗宽范围变化时具有良好的稳定性,并且提高了系统对电网阻抗的鲁棒性㊂011电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀1㊀LLCL 滤波并网逆变器的加权平均电流控制方法㊀㊀三相LLCL 滤波并网逆变器的主电路拓扑结构如图1所示㊂图1中:V dc 代表直流侧母线电压;Q 1~Q 6是三相逆变桥的功率开关管;V inv 代表逆变器桥臂侧输出电压;LLCL 滤波器由机侧电感L 1㊁网侧电网L 2㊁串联支路电容C 和电感L f 构成;R d 代表串联阻尼电阻;电网可等效为电压源与电网阻抗串联的等效模型,V g 代表电网电压,由于电网阻抗中的阻性分量有利于系统稳定,因此考虑最恶劣的情况,即电网阻抗为纯感性;L g 代表电网电感;i 1㊁i c 和i 2分别代表逆变器机侧电流㊁电容电流和网侧电流㊂图1㊀三相LLCL 滤波并网逆变器拓扑结构Fig.1㊀Topology of LLCL grid-connected inverter加权平均电流(weighted average current,WAC)控制方法通过对机侧电流i 1和网侧电流i 2进行加权控制,是一种间接的电流控制策略㊂LLCL 滤波并网逆变器加权平均电流控制方法的系统结构图如图2所示㊂图2中:i ref 代表指令参考电流;i WAC 代表加权平均电流;G c (s )代表电流控制器的传递函数,本文采用比例积分控制器,即G c (s )=k p +k i /s ,其中k p 和k i 分别为比例系数和积分系数;K pwm 代表三相逆变桥调制增益,当脉宽调制的三角载波幅值为1时,有K pwm =V dc /2;V pcc 代表公共耦合点(point of com-mon coupling,PCC)电压;G f (s )代表PCC 电压前馈增益;β代表电流加权系数㊂图2㊀加权平均电流控制系统结构图Fig.2㊀System structure diagram of weighted averagecurrent control根据图2,可以推导出参考电流i ref 到加权平均电流i WAC 的传递函数,即系统开环传递函数表达式为T (s )=G c(s )K pwms (L 1+L 2)s 2(L f C +βL T C )+sR d C +1s 2L f C +L 1L TCL 1+L 2()+sR d C +1+L g [1-K pwm G f (s )](s 2L f C +sR d C +1){}㊂(1)式中L T =L 2+L g ㊂由式(1)可知,在PCC 电压前馈增益和电流加权系数分别满足G f (s )=1/K pwm ,β=L 1/(L 1+L 2)条件时,式(1)可以简化为T (s )=G c (s )K pwms (L 1+L 2)㊂(2)比较式(1)和式(2)可知,WAC 控制是一种降阶控制策略,并网逆变器控制系统由原来的三阶系统降为一阶系统,并且降阶后的开环传递函数与时变电网电感无关,系统在弱电网下对L g 的鲁棒性增强㊂图3为系统开环传递函数的Bode 图,并网逆变器具体参数见表1[20-21]㊂从图3可以看出,降阶后系统具有足够的稳定裕度和较高的带宽范围,并网逆变器的控制复杂度降低㊂图3㊀传递函数T (s )的Bode 图Fig.3㊀Bode diagram of T (s )2㊀考虑数字控制延时对系统的影响分析㊀㊀并网逆变器一般采用数字控制,将不可避免地111第8期杨㊀明等:LLCL 滤波并网逆变器的改进型加权平均电流控制策略引入计算延时㊁采样延时和调制延时,为便于系统在连续域中分析,数字控制延时的传递函数表达式为G d (s )=1T s 1-exp -sT ss exp -sT s ʈexp -1.5sT s ㊂(3)式中T s 代表系统采样周期㊂式(3)所示的数字控制延时等效传递函数中含有指数环节,一般对其进行Pàde 近似处理,式(3)的三阶Pàde 近似延时表达式为G d (s )=120-60a 0s +12a 20s 2-a 30s 3120+60a 0s +12a 20s 2+a 30s 3㊂(4)式中a 0=1.5T s ㊂考虑数字控制延时后,系统结构图如图4所示㊂根据图4可以推导出系统开环传递函数表达式为T d (s )=G c (s )K pwm G d (s )s (L 1+L 2)11+G (s )㊂(5)式中传递函数G (s )的表达式为G (s )=L gL 1+L 2+L 1L T /L fˑ[s 2+(sR d C +1)/(L f C )][1-G d (s )]s 2+(L 1+L T )(sR d C +1)L 1L T C +(L 1+L T )L f C +L g L 1L T C /(L 1+L 2)㊂(6)图4㊀考虑数字控制延时的系统结构图Fig.4㊀System structure diagram considering digitalcontrol delay显然,由式(5)可知,数字控制延时的引入导致WAC 控制的降阶作用失效,因此有必要对数字控制延时带来的影响进行分析㊂图5给出了传递函数T d (s )在弱电网下的Bode 图㊂从图5可以看出,系统开环传递函数产生一个附加反向谐振尖峰,随着L g 增加,该反向谐振尖峰逐渐向低频域偏移,造成系统稳定裕度降低,直至并网逆变器失去稳定性㊂对于数字控制延时的引入,导致弱电网下附加反向谐振尖峰偏移而引起的并网逆变器失稳问题,文献[18]提出一种在PCC 电压前馈通道串联超前补偿器的并网逆变器稳定性提升控制策略,该控制策略可显著改善反向谐振尖峰补偿点处的稳定裕度㊂然而,该控制策略导致PCC 电压比例前馈对电网电压背景谐波的抑制效果减弱,且无法保证L g 在较宽范围变化时系统均具有足够的稳定裕度㊂图5㊀传递函数T d (s )的Bode 图Fig.5㊀Bode diagram of T d (s )3㊀基于等效阻抗模型的改进型加权平均电流控制策略㊀㊀事实上,并网逆变器的实际控制目标为网侧电流i 2㊂鉴于此,本文不从降阶的角度对系统稳定性进行分析,而是通过并网逆变器与电网互联系统的稳定性对控制系统进行重新审视㊂3.1㊀互联系统的等效阻抗模型并网逆变器的稳定性可通过其等效阻抗模型进行分析,图6给出了互联系统的等效阻抗模型㊂其中,并网逆变器等效为电流源I s (s )与逆变器输出阻抗Z out (s )并联的诺顿电路,电网可等效为电压源V g (s )与电网阻抗Z g (s )的串联电路㊂图6㊀等效阻抗模型Fig.6㊀Equivalent impedance model根据图6可得,网侧电流i 2(s )的表达式为i 2(s )=I s(s )-V g (s )Z out(s )[]11+Z g(s )/Zout (s )㊂(7)将图4所示系统结构图进行等效变换,变换后的系统等效结构图如图7所示㊂211电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图7㊀系统等效结构图Fig.7㊀Equivalent system structure diagram ㊀㊀其中传递函数G1(s)和G2(s)的表达式分别为: G1(s)=G d(s)K pwm(s2L f C+sR d C+1)s2(L f+L1)C+sR d C+1+G d(s)G c(s)sβK pwm C;(8)G2(s)=s2(L f+L1)C+sR d C+1+G d(s)G c(s)sβK pwm Cs3[(L f+L1)L2C+L1L f C]+s2(L2+L1)R d C+s(L2+L1)+G d(s)G c(s)βK pwm[s2(L f+L2)C+sR d C+1]㊂(9)㊀㊀根据图7可以推导出电流源I s(s)和输出阻抗Z out(s)的表达式分别为:I s(s)=G c(s)G1(s)G2(s)1+(1-β)G c(s)G1(s)G2(s)i ref(s);(10)Z out(s)=-V pcc(s)i2(s)=1+(1-β)G c(s)G1(s)G2(s)G2(s)[1-G f(s)G1(s)]㊂(11)根据线性控制理论可知,若阻抗比Z g(s)/ Z out(s)满足Nyquist稳定性判据,则互联系统稳定㊂基于阻抗的并网逆变器稳定性判据如下:1)并网逆变器在强电网下能够稳定工作;2)阻抗比Z g(s)/Z out(s)满足Nyquist稳定判据㊂由于并网逆变器一般在强电网下进行设计,因此基于阻抗的稳定性判据第1条容易满足㊂并网逆变器控制系统的相位裕度表达式可通过上述稳定判据的第2条得到,即㊀PM=180ʎ-[arg Z g(j2πf c)-arg Z out(j2πf c)]= 90ʎ+arg Z out(j2πf c)㊂(12)式中f c代表阻抗Z g(s)与Z out(s)的交截频率㊂根据式(12)可知,并网逆变器稳定的条件为相位裕度PM>0ʎ,即输出阻抗Z out(s)在频率f c处的相位高于-90ʎ㊂图8给出了Z out(s)的Bode图㊂显然,Z out(s)在低频域呈现出容抗特性,并且相位曲线低于-90ʎ,交截频率f c随着L g的增加而逐渐向低频域偏移,在L g=1mH时,系统相位裕度为-9.6ʎ,并网逆变器已然失去稳定性㊂图8㊀输出阻抗Z out(s)的Bode图Fig.8㊀Bode diagram of output impedance Z out(s)此外,电网中含有大量的背景谐波电压,当并网逆变器处于临界稳定状态时,即系统相位裕度为0,此时阻抗模型在交截频率f c处有Z g(j2πf c)+Z out(j2πf c)=0㊂由式(7)可知,电网中频率为f c的背景谐波电压将被放大,网侧电流含有较多的谐波分量,该现象称为并网逆变器的谐波谐振㊂事实上,即使PM>0ʎ,当系统相位裕度接近0时,频率f c附近的电网背景谐波电压仍会得到放大,造成网侧电流发生畸变㊂因此,为保证并网逆变器在弱电网下具有较高质量的输出网侧电流i2,同时避免谐波谐振现象的发生,控制系统应具有足够的相位裕度㊂3.2㊀基于前馈复矢量滤波器的改进型控制策略由3.1节分析可知,系统在低频域的相位裕度较低导致并网逆变器失稳,为了提高系统的稳定性,增大并网逆变器对电网阻抗的适应范围,应对311第8期杨㊀明等:LLCL滤波并网逆变器的改进型加权平均电流控制策略Z out (s )在低频域的相位进行补偿㊂分别记传递函数H 1(s )和H 2(s )的表达式如下:H 1(s )=1+(1-β)G c (s )G 1(s )G 2(s )G 2(s );(13)H 2(s )=11-G f (s )G 1(s )㊂(14)根据式(11)可得Z out (s )=H 1(s )H 2(s ),图9分别给出了H 1(s )和H 2(s )的Bode 图㊂从图9可以看出,H 2(s )含有一个反向谐振尖峰,用f r1代表该谐振尖峰处的频率,在低于f r1的频域内,H 2(s )具有负相位,不利于系统的稳定性;在高于f r1且低于f r2的频域内,H 2(s )的相位大于0,有利于提高系统的相位裕度;H 2(s )在高于f r2频域内具有较小的负相位,对系统影响很小㊂图9㊀传递函数H 1(s )和H 2(s )的Bode 图Fig.9㊀Bode diagram of H 1(s )and H 2(s )由于H 2(s )在频率f r1和f r2处的相位为0,将s =j ω代入式(14),并使用欧拉公式,令H 2(j ω)的虚部等于0,整理可得L 1R d C 2ω2cos(1.5T s ω)+sin(1.5T s ω)[(1-L f Cω2)2/ω+(R d C )2ω-L 1Cω(1-L f Cω2)]-βk p R d K pwm L f C 2ω2=βK pwm C (R d Ck i -k p )㊂(15)由此可知,谐振频率f r1和f r2均为式(15)的根㊂由于式(15)是一个超越方程,难以对其进行求解,此处采用图像法间接获得方程的根㊂图10给出了式(15)所对应的函数图像,根据表1所给并网逆变器参数可得谐振频率f r1ʈ2268Hz㊁f r2ʈ6913Hz㊂值得说明的是,不同并网逆变器参数,求解谐振频率f r1和f r2的值均可采用式(15)的图像法间接获得其近似解㊂图10㊀式(15)所对应的函数图像Fig.10㊀Function image corresponding to equation (15)通过上述分析可知,若要提高控制系统的相位裕度,增强并网逆变器的稳定性,需要增大H 2(s )在低于f r1频域内的相位,同时保证高于f r1频域内的相位大于0㊂令传递函数T 0(s )=-G f (s )G 1(s ),其Bode 图如图11所示㊂根据式(14)可知,T 0(s )位于H 2(s )的分母部分,为了提高系统的相位裕度,可通过增大T 0(s )在低于f r1频域内的相位,减小其在高于f r1频域内的相位,进而间接获得较高的相位裕度㊂图11㊀传递函数T 0(s )的Bode 图Fig.11㊀Bode diagram of T 0(s )根据前述提高系统相位裕度的补偿原则,本文提出一种在PCC 电压前馈通道中串联一阶低通复矢量滤波器的相位补偿控制策略,一阶低通复矢量滤波器的传递函数表达式为G fv (s )=k cξωLs -j ωL +ξωL㊂(16)411电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀式中:k c 为比例系数;ωL 代表转折角频率;ξ代表阻尼系数㊂图12给出了该滤波器的Bode 图,可以看出,该滤波器在转折频率f L 处的幅值增益为20lg k c ,相移为0ʎ㊂低于f L 的频域内相位变化范围为0ʎ~arctan(1/ξ),高于f L 的频域内相位变化范围为-90ʎ~0ʎ㊂因此,根据前述相位补偿原则,可令谐振频率f r1=ωL /(2π)=f L㊂图12㊀一阶低通复矢量滤波器的Bode 图Fig.12㊀Bode diagram of first-order low-pass complexvector filter暂时考虑比例系数k c =1,相位补偿后的传递函数H 2(s )和T 0(s )变为:H ᶄ2(s )=11-G f (s )G fv (s )G 1(s );(17)T ᶄ0(s )=-G f (s )G fv (s )G 1(s )㊂(18)传递函数T ᶄ0(s )的Bode 图如图13所示,从图13可以看出,随着阻尼系数ξ的减小,T ᶄ(s )在低于f r1频域内的相位曲线逐渐抬升,高于f r1频域内的相位曲线逐渐下降,意味着逆变器输出阻抗在低频域的相位得到补偿,系统相位裕度逐渐增大㊂然而,在ξ减小的同时,T ᶄ0(s )的幅值增益在奈奎斯特全频域(f s /2)内逐渐下降,这将导致逆变器输出阻抗的幅值增益降低,减弱对电网背景谐波的抑制效果㊂为了兼顾系统稳定性和电网背景谐波抑制效果,以及避免输出阻抗含有右半平面极点,可选取阻尼系数ξ=1/31/2,此时复矢量滤波器在低频域对传递函数T ᶄ0(s )可提供最大60ʎ的相位补偿㊂补偿后传递函数H ᶄ2(s )的Bode 图如图14所示㊂从图14可以看出,H ᶄ2(s )在低频域的相位得到极大提升,此时系统在弱电网下具有足够的相位裕度㊂然而,在低于f r1附近的频域内,H ᶄ2(s )的相位小于-90ʎ,产生了相位衰减,不利于并网逆变器在强电网下的稳定性㊂此外,可以明显看出H ᶄ2(s )的低频增益降低,并网逆变器对电网背景谐波抑制效果减弱㊂图13㊀传递函数T ᶄ0(s )的Bode 图Fig.13㊀Bode diagram of T ᶄ0(s)图14㊀传递函数H ᶄ2(s )的Bode 图Fig.14㊀Bode diagram of H ᶄ2(s )为了保证传递函数H ᶄ2(s )在奈奎斯特全频域内的相位高于-90ʎ,根据式(17)可以推导出其相频特性表达式为arg H ᶄ2(j ω)=artan k c ξωL(ξωL )2+(ω-ωL )2I m (ω)1-k c ξωL(ξωL )2+(ω-ωL )2R e (ω)ȡ-90ʎ㊂(19)式中R e (ω)和I m (ω)的表达式分别为:511第8期杨㊀明等:LLCL 滤波并网逆变器的改进型加权平均电流控制策略R e (ω)=R e2(ω)[ξωL R e1(ω)+(ω-ωL )I m1(ω)]+I m2(ω)[ξωL I m1(ω)-(ω-ωL )R e1(ω)][R e2(ω)]2+[I m2(ω)]2;I m (ω)=R e2(ω)[ξωL I m1(ω)-(ω-ωL )R e1(ω)]-I m2(ω)[ξωL R e1(ω)+(ω-ωL )I m1(ω)][R e2(ω)]2+[I m2(ω)]2;R e1(ω)=cos(1.5T s ω)(1-L f Cω2)+sin(1.5T s ω)R d Cω;I m1(ω)=cos(1.5T s ω)R d Cω-sin(1.5T s ω)(1-L f Cω2);R e2(ω)=1-(L f +L 1)Cω2+βK pwm Cω[k p sin(1.5T s ω)+k i /ωcos(1.5T s ω)];I m2(ω)=R d Cω+βK pwm Cω[k p cos(1.5T s ω)-k i /ωsin(1.5T s ω)]㊂üþýïïïïïïïïïïïï(20)㊀㊀由式(19)可得0<k c ɤ(ξωL )2+(ω-ωL )2R e (ω)ξωL=Z (ω)㊂(21)为了保证补偿后的H ᶄ2(s )不产生相位衰减,比例系数k c 应小于等于Z (ω)在低于f r1频域内的最小值㊂图15给出了Z (ω)关于频率的函数图像㊂从图15可以看出,Z (ω)在低于f r1频域内具有一个极小值,同时亦为Z (ω)的最小值,由此可得k c 的取值范围为0<k c ɤ0.62㊂(22)图16给出了在不同k c 取值下H ᶄ2(s )的Bode图㊂从图16可以看出,当k c ɤ0.62时,H ᶄ2(s )在奈奎斯特全频域内的相位均高于-90ʎ,并且随着k c 的减小,在低频域内的相位和幅值增益均降低㊂此外,当k c 减小的同时,谐振频率f r1处的幅值增益逐渐增大,有利于对该频率附近的电网背景谐波抑制㊂因此,综合考虑系统的相位裕度和谐波抑制效果,折中选取比例系数k c =0.2㊂图15㊀Z (ω)的函数图像Fig.15㊀Function image of Z (ω)将参数ξ=1/31/2㊁k c =0.2代入式(16),用Z ᶄout (s )代表进行相位补偿后的逆变器等效输出阻抗,根据式(17)可知Z ᶄout (s )=H 1(s )H ᶄ2(s )㊂根据分布式并网发电标准,弱电网可通过系统短路容量比(short circuit ratio,SCR)进行评价,当SCRȡ3时称为强电网,2ɤSCR <3时称为弱电网,SCR <2时称为极弱电网[22]㊂本文考虑并网逆变器在系统短路容量比大于2.5的范围内进行稳定性分析,即L g 从0mH 变化到12.8mH(对应SCR =2.5)㊂图16㊀传递函数H ᶄ2(s )的Bode 图(ξ=1/31/2)Fig.16㊀Bode diagram of H ᶄ2(s )Z ᶄout (s )的Bode 图如图17所示,比较图8可知,补偿后的输出阻抗在低频域的相位明显增大,当L g =12.8mH 时系统仍具有10.5ʎ的相位裕度,并网逆变器在SCRȡ2.5范围内均具有足够的相位裕度㊂此外,Z ᶄout (s )在低频域的幅值增益低于Z out (s ),并网逆变器对电网电压背景谐波的抑制效果减弱,但在基频(f 0=50Hz)处Z ᶄout (s )的幅值增益为42dB,仍可对电网电压进行较高的抑制,使得并网逆变器输出质量优良的网侧电流i 2㊂611电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图17㊀输出阻抗Z ᶄout (s )的Bode 图Fig.17㊀Bode diagram of output impedance Z ᶄout (s )3.3㊀网侧电流稳定性分析由于加权平均电流控制是一种对网侧电流的间接控制策略,因此有必要对并网逆变器网侧电流的稳定性进行分析㊂根据图7可以推导出弱电网下参考电流i ref 到网侧电流i 2的闭环传递函数表达式为ψ(s )=i 2(s )i ref (s )=G c (s )G 1(s )G 2(s )1+G 1(s )G 2(s )[((1-β)G c (s ))-G f (s )]+Z g (s )G 2(s )㊂(23)进行相位补偿后的闭环传递函数表达式为ψᶄ(s )=i ᶄ2(s )i ref (s )=G c (s )G 1(s )G 2(s )1+G 1(s )G 2(s )[((1-β)G c (s ))-G fv (s )G f (s )]+Z g (s )G 2(s )㊂(24)根据式(23)和式(24)可以画出补偿前后闭环传递函数在SCRȡ2.5范围内,电网电感变化时的主导闭环极点根轨迹,分别如图18(a)和图18(b)所示㊂从图18(a)可以看出,随着L g 的增加,ψ(s )系统闭环极点逐渐向虚轴靠拢,直至产生右半平面极点,导致并网逆变器控制系统失稳;比较图18(b)可知,进行相位补偿后的系统闭环传递函数ψᶄ(s ),在L g ɤ12.8mH 范围内变化时其闭环极点均在左半平面,并网逆变器始终具有较好的稳定性㊂从图18(b)亦可看出,比例系数k c 对闭环系统的稳定性有着重要的影响㊂随着k c 的增加,闭环传递函数ψᶄ(s )的根轨迹逐渐向虚轴偏移,系统将出现不稳定闭环极点,导致并网逆变器在弱电网下失稳㊂因此,在保证对输出阻抗进行相位补偿的同时,要保证闭环传递函数无右半平面的闭环极点㊂图18㊀闭环传递函数ψ(s )和ψᶄ(s )的根轨迹Fig.18㊀Root locus of closed-loop transfer function ψ(s )and ψᶄ(s )3.4㊀LLCL 滤波器参数漂移对系统稳定性影响实际工程中,滤波器普遍采用铁心电感,并网逆变器在不同环境工作下,由于器件老化等其他因素可能会造成LLCL 滤波器参数的实际值偏离设定值,因此,分析LLCL 滤波器参数漂移对所提控制策略的稳定性影响是非常有必要的㊂其中,设置滤波器参数L 1㊁L 2㊁L f 和C 的实际值均偏离设定值的范围为ʃ5%,设定值如表1所示㊂根据前述所提控制策略的参数设计,分别给出了滤波器参数发生漂移后的并网逆变器输出阻抗Z ᶄout (s )的Bode 图,如图19所示㊂从图19可以看出,当滤波器参数发生轻微偏移时,仅对Z ᶄout (s )在高频域的幅相特性产生较小的影响,而对于中低频域几乎无影响㊂因此,所提控制策略对LLCL 滤波器参数漂移具有极强的鲁棒性㊂值得说明的是,LLCL 滤波器中L f 和C 串联支路的目711第8期杨㊀明等:LLCL 滤波并网逆变器的改进型加权平均电流控制策略的是为了衰减开关频率次谐波,而参数L f和C发生漂移将会影响滤波器对高频次开关谐波的衰减效果,但会对开关频率附近的谐波产生较强的衰减作用㊂图19㊀LLCL滤波器参数漂移时输出阻抗Zᶄout(s)的Bode图Fig.19㊀Bode diagram of output impedance Zᶄout(s)when LLCL filter parameters drift 811电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀4㊀仿真结果与分析为验证所提基于PCC电压前馈通道中串联一阶低通复矢量滤波器的鲁棒性并网逆变器加权平均电流控制策略,在MATLAB/Simulink中搭建如图1所示的三相LLCL滤波器并网逆变器仿真模型,并网逆变器参数见表1㊂其中,一阶低通复矢量滤波器的实现形式如图20所示㊂表1㊀并网逆变器参数Table1㊀Parameters of grid-connected inverters图20㊀一阶低通复矢量滤波器的实现形式Fig.20㊀Realization form of first-order low-pass complex vector filter图21分别给出了在传统加权平均电流控制下,并网逆变器输出网侧电流i2和公共耦合点电压V pcc的仿真波形㊂为便于显示,已将公共耦合点电压缩小3倍㊂从图21可以看出,在电网电感L g= 0.5mH时,网侧电流i2和A相公共耦合点电压V pcca 波形质量良好,对i2进行快速傅里叶分析可得其总谐波失真数为2.20%;在电网电感L g=1mH时,并网逆变器已然失去稳定,侧电流i2发生严重振荡,总谐波失真数为28.03%,已经远远超出了并网条件的限定值5%㊂并网逆变器在所提鲁棒性控制策略下运行时的网侧电流i2和公共耦合点电压V pcc的仿真波形,如图22所示㊂显然,采用所提控制策略运行时,并网逆变器网侧电流质量得到明显改善,在电网电感为2㊁7㊁12.8mH条件下,i2的总谐波失真数分别为1.22%㊁1.12%㊁3.60%,均满足并网要求的限定值㊂图21㊀传统控制策略下的i2和V pcc仿真波形Fig.21㊀Simulation waveforms of i2and V pcc under tra-ditional control strategy图22㊀所提控制策略下的i2和V pcc仿真波形Fig.22㊀Simulation waveforms of i2and V pcc under the proposed control strategy911第8期杨㊀明等:LLCL滤波并网逆变器的改进型加权平均电流控制策略。
并网逆变器的电流控制方法陈敬德,1140319060;杨凯,1140319070;指导老师:王志新(上海交通大学电气工程系,上海,200240)摘要:并网逆变器是光伏发电系统的一个核心部件,其控制技术一直是研究的热点。
其使用的功率器件属于电力电子设备,它们固有特性会对系统产生不利的影响,为了防止逆变器中的功率开关器件处于直通状态,通常要在控制开关管的驱动信号中加入死区,这给逆变器输出电压带来了谐波,对电网的电能产生污染。
本文对传统的控制方法重复控制、传统的PI控制、dq轴旋转坐标控制、比例谐振控制进行了总结分析,并比较了它们的优缺点。
关键词:并网逆变器,重复控制,传统的PI控制,dq轴旋转坐标控制,比例谐振控制0引言随着现代工业的迅速发展,近年来全球范围内包括煤、石油、天然气等能源日益紧缺,全球将再一次面临能源危机,同时,这些燃料能源的应用对我们所生活的周围环境产生了严重的影响。
环境问题受到了人们的广泛关注,为了解决能源紧缺以及环境污染问题,寻找可再生能源是解决这一问题的有效方式。
太阳能因其清洁,无污染的优势受到了人们的青睐,太阳能光伏发电是目前充分利用太阳能资源的主要方式之一。
太阳能发电主要有单独运行和并网运行两种模式,其中并网运行发展速度越来越快,应用的规模也愈来愈大[1]。
逆变器是光伏发电系统中的关键部件,逆变器的工作原理是通过IGBT、GTO、GTR等功率开关管的导通和关断,把直流蓄电池电能、太阳能电池能量等变换为电能质量较高的交流电能,可以把它看成是一种电能转换设备。
功率开关管的开关频率一般都比较高,因此利用它们进行电能转换的效率也比较高,但有一个很大的缺点是由它们组成的逆变系统的输出电能却不理想,其输出的波形中包含了很多对电能质量产生不利的方波,而很多场合都要求其输出的是一定幅值和频率的正弦波,所以要寻找更好的控制策略来提高逆变器的电能质量,让其输出各项性能指标都满足要求的波形。
目前所用的逆变器可以分为以下两类:一类是恒压恒频逆变器,这类逆变器在各种电源持续供电的领域应用广泛,它能够输出电压幅值和频率都是特定值的交流正弦波,简称CVCF 逆变器。
太阳能光伏并网控制逆变器工作原理及控制方法
1.光伏电池板:太阳能光伏电池板将太阳能转化为直流电能。
2.光伏逆变器:光伏逆变器用于将直流电能转换为交流电能。
其基本工作原理是将直流电能通过电子元件(如晶体管、MOSFET等)的开关控制,改变电流和电压的形式,最终得到适合电网输入的交流电。
3.控制方法:太阳能光伏并网逆变器的控制方法主要有以下几种:
-简单的开关控制:通过控制开关电路的通断,将直流电能转换为交流电能。
这种方法比较简单,但效率较低。
-最大功率点追踪(MPPT)控制:通过检测光伏电池板输出电压和电流的变化,调整逆变器的工作参数,使得光伏电池板能够在不同光照条件下工作在最佳工作点,提高光伏发电系统的效率。
-滞环控制:为了保护电网和逆变器,滞环控制方法用于对逆变器工作点进行精确控制,并确保逆变器不会输出超过一定限制的电压和电流。
-网络同步控制:光伏逆变器必须与电网同步运行,确保输出的交流电与电网电压相位和频率一致。
这需要逆变器具备精准的频率和相位检测功能,并通过控制电路将输出电压和频率调整到与电网同步。
综上所述,太阳能光伏并网逆变器将直流电能转换为交流电能,并通过不同的控制方法保证逆变器的稳定工作和输出交流电的质量。
随着太阳能光伏技术的不断发展,逆变器的效率和控制精度也在不断提高,使得光伏发电系统在实际应用中更加可靠和高效。
并网逆变器的电流控制方法敬德,1140319060;凯,1140319070;指导老师:王志新(交通大学电气工程系,,200240)摘要:并网逆变器是光伏发电系统的一个核心部件,其控制技术一直是研究的热点。
其使用的功率器件属于电力电子设备,它们固有特性会对系统产生不利的影响,为了防止逆变器中的功率开关器件处于直通状态,通常要在控制开关管的驱动信号中加入死区,这给逆变器输出电压带来了谐波,对电网的电能产生污染。
本文对传统的控制方法重复控制、传统的PI控制、dq轴旋转坐标控制、比例谐振控制进行了总结分析,并比较了它们的优缺点。
关键词:并网逆变器,重复控制,传统的PI控制,dq轴旋转坐标控制,比例谐振控制0引言随着现代工业的迅速发展,近年来全球围包括煤、石油、天然气等能源日益紧缺,全球将再一次面临能源危机,同时,这些燃料能源的应用对我们所生活的周围环境产生了严重的影响。
环境问题受到了人们的广泛关注,为了解决能源紧缺以及环境污染问题,寻找可再生能源是解决这一问题的有效方式。
太阳能因其清洁,无污染的优势受到了人们的青睐,太阳能光伏发电是目前充分利用太阳能资源的主要方式之一。
太阳能发电主要有单独运行和并网运行两种模式,其中并网运行发展速度越来越快,应用的规模也愈来愈大[1]。
逆变器是光伏发电系统中的关键部件,逆变器的工作原理是通过IGBT、GTO、GTR等功率开关管的导通和关断,把直流蓄电池电能、太阳能电池能量等变换为电能质量较高的交流电能,可以把它看成是一种电能转换设备。
功率开关管的开关频率一般都比较高,因此利用它们进行电能转换的效率也比较高,但有一个很大的缺点是由它们组成的逆变系统的输出电能却不理想,其输出的波形中包含了很多对电能质量产生不利的方波,而很多场合都要求其输出的是一定幅值和频率的正弦波,所以要寻找更好的控制策略来提高逆变器的电能质量,让其输出各项性能指标都满足要求的波形。
目前所用的逆变器可以分为以下两类:一类是恒压恒频逆变器,这类逆变器在各种电源持续供电的领域应用广泛,它能够输出电压幅值和频率都是特定值的交流正弦波,简称CVCF 逆变器。
第二类是变压变频逆变器,这种逆变器主要用在电动机的调速系统中,它能够输出特定的幅值电压和频率,简称VVVF 逆变器[2]。
本文将对并网逆变器的几种常见控制方法进行总结,如传统的PI控制、基于dq 旋转坐标系的控制、重复控制及比例谐振控制。
给出了框图和数学模型,并指出了它们各自的优缺点。
1重复控制1.1重复控制思想重复控制是基于模原理的一种控制方法。
所谓模原理,即在一个闭环调节系统中,在其反馈回路中设置一个部模型,使该部模型能够很好的描述系统的外部特性,通过该模型的作用可使系统获得理想的指令跟踪特性,具有很强的抗干扰能力[3-4]。
基于重复控制的算法在逆变器中得到了广泛的应用[5-7]。
其基本思想是假设前一个基波周期中出现的波形畸变将会在下一个基波周期的同一时间重复出现,在此假设条件下,控制器根据每个开关周期给定信号与反馈信号的误差来确定所需的校正信号,然后在下一个基波周期的同一时间将此信号叠加到原控制信号上,以消除以后各基波周期中出现的重复畸变[8]。
模所起的作用就相当于是一个任意信号发生器,即使是给定的指令信号趋于0时,其依然能够持续不断地输出控制信号,以维持合适的控制作用。
重复控制能够很好的抑制波形中出现的周期扰动,但是对于系统中的非周期性扰动作用不大[9]。
然而,由功率器件的死区以及非线性负载给逆变器系统带来的影响都具有周期性,因此利用重复控制的这个特性能够很好的解决这些问题,提高逆变系统的性能。
根据我们所学的经典控制理论,若系统中含有积分环节,那么它就能够无误差的跟踪阶跃输入,而且对积分环节之前的阶跃干扰也有很好的抑制作用。
事实上积分环节可以看成是系统的模,因闭环系统中的积分环节包含了阶跃输入的模型,从而可以实现精确无误差地跟踪阶跃输入信号。
如果控制系统模的数学模型所描述的是周期性的信号,那么闭环系统对周期性的扰动具有很好的抑制作用,若给定指令或扰动信号只是单一频率的正弦信号,系统的膜中只要包含有正弦的数学模型:22(S)G S ωω=+(1-1) 就能够实现精确跟踪指令信号。
如果指令信号或扰动信号中还包含其它频率的信号,这种情况下,若要实现精确无误差跟踪,只能通过在膜中加入多个描述特定频率信号的数学模型,若信号所包含的频率成分较多,所需要的模数量就很多,这给系统的控制带来了一定的困难。
为此就要寻找一种能够描述频率成分较复杂的信号的模,分析可知,虽然扰动信号的频率成分复杂,但都具有重复性的特点,而且在每个基波周期都以完全相同的波形出现。
针对这种复杂的信号,可选择式(1-2)作为系统的模:(S)1TsTs e G e --=- (1-2) T 为给定信号的周期,式(1-2)所描述的是一个周期延迟正反馈环节,无论给定信号的形式如何,只要重复的出现,而且频率与基波频率的倍数,那么该模就会逐周期累加输入信号。
即使在给定信号衰减为0时,系统依然能够输出跟前一个周期相同的信号,模所起的作用和积分环节相似,区别仅在于模是以基波周期为单位对给定信号进行累加的,所以这种形式的模能够实现对多种频率信号的跟踪。
采用这种特殊形式的模的闭环控制系统被称为重复控制系统[10]。
由于上式中的延时环节采用模拟器件实现起来比较困难,因而在实际应用中都是使用它的离散形式来实现的,如下式(1-3)所示:(S)1NN z G z --=- (1-3) 1.2重复控制器结构模控制是重复控制系统的关键部分,它的特点是:能够输出稳定持续的控制信号,当系统中的模是理想模时,即使外部给定指令为0,模也能够重复输出前一周期的信号。
但是理想模存在单位圆上的极点,这使得系统处于临界稳定状态,在实际中这种临界状态不可取,当被控对象的参数发生变化时就有可能导致系统不稳定,图1所示的为重复信号发生器基本框图:++U iU 0图1 重复信号发生器 因为图1所给出的重复信号发生器存在临界稳定状态,不利于系统的控制,所以在应用中常对模进行改进,如图2所示:++U iU 0图2 改进型重复信号发生器图2中,Q(z)为一阶低通滤波器或者略小于1的常数。
由图4-2输入和输出之间的关系为:(z)1(z)1(z)z O Ni U U Q -=-(1-4)若取Q(z)=0.95,则由上式可得:(z)1(z)10.95z O Ni U U -=-(1-5)将1-5式展开得()0.95()(k)o o i U k U k N U =-+(1-6) 在图2改进后的膜上面,加入周期延时环节Nz-和补偿器C(z)就构成重复控制系统,其基本结构如下图3所示。
C(z)P(z)R-+++Y图3 重复控制系统框图图3中:R为参考输入信号Y 为输出信号E 为偏差信号N 为每个基波周期的采样次数Nz-为周期延迟环节Q(z) 为常数或一阶低通滤波器C(z)为补偿器P(z)为被控对象上面图3 中,系统检测到参考输入指令信号R和输出信号Y 之间的偏差信号,然后模对检测到的偏差信号逐周期进行积分,把以前的偏差储存起来,即使检测到的误差为0时,系统仍然能够不断输出控制信号,控制信号经过补偿器的校正后,得到幅值和相位正确的控制信号,然后在下一个周期把控制信号加到控制对象上,以消除扰动的影响。
2重复PI 控制2.1重复PI控制的思想逆变器作为发电系统中实现直流到交流变换的关键元件,因其输出电压直接并入电网供负载使用,希望它输出的电能质量越高越好。
光伏发电系统不仅要具有高精度的稳态响应,同时还希望它具有快速的动态响应速度。
对系统的动态要求主要是希望系统能够快速的跟踪给定的电压指令,在其所供的负载发生变化时能够快速的达到新的稳定状态。
前面已经介绍,重复控制能够抑制输出波形的畸变,提高系统的稳态精度。
重复控制抑制畸变的原理是先把前一个周期检测的误差储存起来,然后在下一个基波周期开始时刻把前一周期的信号累加后输出控制信号对误差产生校正作用。
但是从重复控制系统的结构图中我们可以看到在重复控制系统的前向通道中包含有一个Nz-环节,这个周期延迟环节使得控制信号延迟一个周期输出,导致重复控制在得到误差信号后并不能立即发挥作用,而是延迟到下一个周期的某个时刻才产生作用,这样的话,若控制系统中有扰动存在,在扰动的第一个基波周期时间,系统对扰动并不产生调节作用,系统处于一种开环状态,而且重复控制对误差的积分是逐周期进行的,所以重复控制系统存在动态性能不佳的缺陷[11-12]。
为了使并网逆变系统具有良好的动态性能和稳态性能,本文采用重复PI控制策略,在该控制策略中一种控制的主要作用是致力于提高逆变器的动态特性,另一种控制的主要作用则是提高系统的稳态性能,抑制重复性扰动,两者各司其职,且互为补充,全面提升系统的性能。
因为PI控制在对误差进行调节时是以开关周期为单位进行的,而重复控制则是以基波周期为单位进行调节的,这两个控制的调节速度不同步,重复控制和PI控制这两个控制在时间上是相互独立的。
当系统运行达到稳定时,输出与给定指令之间的误差相对比较小,PI控制基本不对系统产生调节作用,系统的控制主要由重复控制来完成。
当系统中所出现的扰动作用比较大时,输出与给定之间的误差突增,重复控制器由于存在一个基波周期的延迟,其输出不会发生突变,这就使系统无法快速的跟踪给定,此时由PI控制器检测到输出与给定的误差突变并立即输出控制信号对误差进行控制。
2.2 PI电流控制器的设计PI 调节在工程上应用非常广泛,也是我们所熟悉的控制中最成熟的一种调节,其简单直观,容易数字化实现,对于逆变器,选择PI调节器对信号误差进行比例和积分控制是一种简单有效的方式。
可以用一个惯性环节来表示逆变器的传递函数如式4-21表示。
1pwmpwmpwmKGT S=+(2-1)其中:pwmK表示逆变器的放大系数pwmT表示延迟时间常数S 表示复频域因子其在d 、q旋转坐标系下的控制框图如下所示:图4 旋转坐标下的控制框图图中*d I ,*q I 为d 轴,q 轴的电流指令dE 、qE 为三相电网电压矢量的d 、q分量可以看成系统的扰动输入d I 、q I 为变换到d 轴、q 轴并网电流 pi G 为电流环的PI 控制器 fG 为滤波器由上图可以得到的d I 、q I 的表达式*...111pi pwm f f fd d q dpi pwm f pi pwm fpi pwm fG G G G L G I I I E G G G G G G G G G ω=--+++ (2-2)*...111pi pwm f f fq q d dpi pwm fpi pwm fpi pwm fG G G G L G I I I E G G G G G G G G G ω=--+++ (2-3)式(2-2)和(2-3)可以看出不仅电网电压的d 、q 分量dE 、qE 的对系统的输出产生作用,同时还有来自d 、q 轴之间的耦合.qL I ω和.dL I ω扰动对系统产生影响。