多轴无人机装配与调试初级修订稿
- 格式:docx
- 大小:164.38 KB
- 文档页数:4
《无人机组装与调试》
教学教案
授课学时安排
《无人机组装与调试》教案首页
《无人机组装与调试》教案首页
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页
《无人机组装与调试》教案纸
《无人机组装与调试》教案首页。
教案主要内容一、导入控制系统对于植保无人机的飞行至关重要。
二、课程内容(一)水泵植保无人机的水泵应保持设备清洁、干燥、无油污、不泄漏。
每天检查水泵的运行声音是否正常,发现问题及时处理严禁水泵在药桶中的液体被抽空的状态下工作。
水泵内严禁进入金属物体以及胶皮、棉纱、塑料布之类柔性物质,以免破坏水泵的过流部件及堵塞叶轮流道,使水泵不能正常工作。
经常检查水泵进、出水管路系统(管件、阀门)支撑机构是否有松动,要确保支撑机构牢靠,泵体不承受支撑力。
水泵长时间不用时,应将水泵拆开,做防锈处理,重新装好,妥善保存,以备下次再用。
水管路必须保证高度的密封,检查水泵及水管路的连接处是否有松动的现象。
尽量控制水泵的流量和扬程在注明的范围内,以保证水泵在最高效率点运转,才能获得最大的节能效果。
如果水泵长期停用,需将水泵全内部水分全部处理干净,可用吹风机、干抹布等工具。
一定要注意防止水泵锈蚀:当水泵不用时,应擦拭干净,放在通风干燥处。
如水泵的表面受损脱漆,应及时清除锈迹,涂抹防锈漆,加以保护。
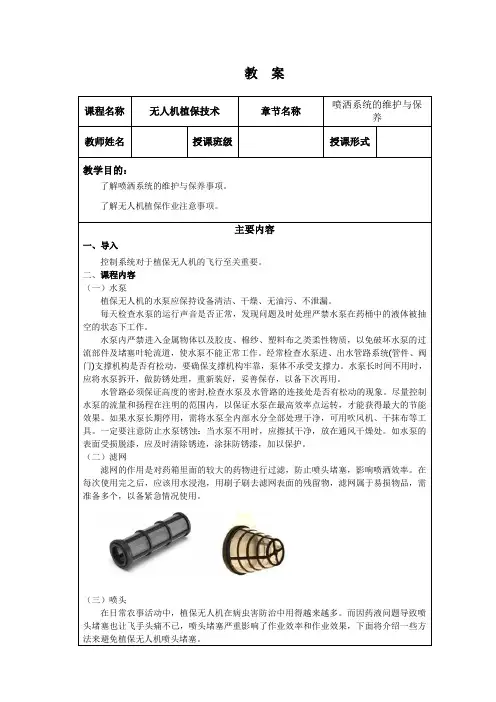
(二)滤网滤网的作用是对药箱里面的较大的药物进行过滤,防止喷头堵塞,影响喷洒效率。
在每次使用完之后,应该用水浸泡,用刷子刷去滤网表面的残留物,滤网属于易损物品,需准备多个,以备紧急情况使用。
(三)喷头在日常农事活动中,植保无人机在病虫害防治中用得越来越多。
而因药液问题导致喷头堵塞也让飞手头痛不已,喷头堵塞严重影响了作业效率和作业效果,下面将介绍一些方法来避免植保无人机喷头堵塞。
长时间的作业会使滤网外层形成一圈粘粘的药膜(尤其是粉剂)阻挡药液的喷洒,勤清洗,有必要。
解压阀部位也会有药剂沉淀,药箱每次作业完都要第一时间反复清洗,首先不会影响下次喷药质量,其次也把药箱的沉淀物清洗掉,避免堵塞!喷头的插口不能用手摸,防止氧化。
安装时,喷头插口须对准,不能硬插,如果接触不好,喷头就不能正常工作。
喷头前面的喷嘴由特殊物质制成,在喷头保存、装卸、清洗、浸泡时要小心。

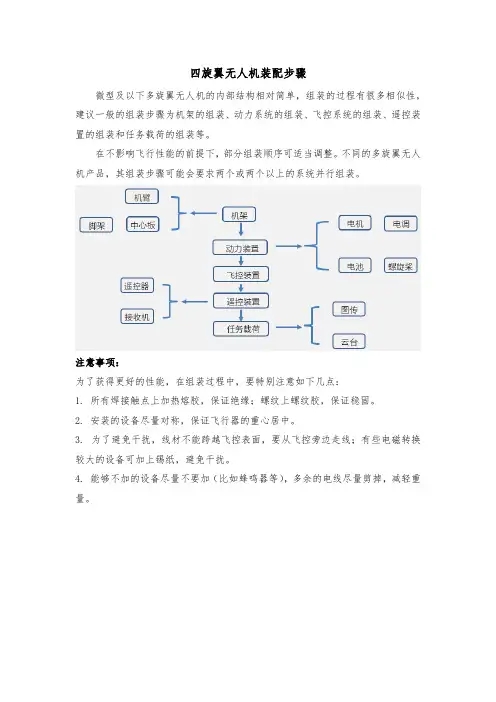
四旋翼无人机装配步骤
微型及以下多旋翼无人机的内部结构相对简单,组装的过程有很多相似性,建议一般的组装步骤为机架的组装、动力系统的组装、飞控系统的组装、遥控装置的组装和任务载荷的组装等。
在不影响飞行性能的前提下,部分组装顺序可适当调整。
不同的多旋翼无人机产品,其组装步骤可能会要求两个或两个以上的系统并行组装。
注意事项:
为了获得更好的性能,在组装过程中,要特别注意如下几点:
1. 所有焊接触点上加热熔胶,保证绝缘;螺纹上螺纹胶,保证稳固。
2. 安装的设备尽量对称,保证飞行器的重心居中。
3. 为了避免干扰,线材不能跨越飞控表面,要从飞控旁边走线;有些电磁转换较大的设备可加上锡纸,避免干扰。
4. 能够不加的设备尽量不要加(比如蜂鸣器等),多余的电线尽量剪掉,减轻重量。

多轴无人机装配与调试
初级
Document number【AA80KGB-AA98YT-AAT8CB-2A6UT-A18GG】
多轴飞行器(m u l t i-r o t o r s)
制作无人机
详细资料:多旋翼模型入门—理论知识篇
电池 Lithium Polymer battery
串联:电压增加,电量不相加
满电电压:4.2V(单节)
安全电压:3.6V
安全电量:20%
电池容量:2200mAh(电池标注)/每片
串联数:3S(可见)=12.6V
充电倍率:5C(电池标注)
最高充电电流: 5*2200*10-3=11A 这是最高充电电流,一般采用0.8-1.5C充电电流=1.5A
放电倍率:22C(电池标注)同充电电流
储存电压:3.8V
Smart battery meter
插入时候注意正负极,可以测总电压、电量和分电压、电量。
同时还可以给电机产生模拟信号:
插入后长按cell键进入其他模式,F1 balance 平衡电池电量,短按cell进入模式中;
按mode切换到F2 dis放电模式,同理F2测内阻模式,F4产生一定的信号。
F4产生的信号可以通过输出给电调,用以测试轴的旋转方向。
在每一个模式中,短按cell可返回模式选择界面,长按返回最初界面。
充电器
主要需要的选项:电池类型Li-Po,并行度3S,充电类型平衡(充电时选)、放电、存储等,充电电流。
详见说明书。
无刷电机与电调 motors and electronic speed
controllers(ESCs)
可参考:
四旋翼飞行器结构和原理+四轴飞行diy全套入门教程
无刷电机
电机为飞行器提供动力。
由电调输出的三相交流电驱动。
三条线中互换两条会将电机的转向反向。
电机不直接接电池。
四六八轴飞行器转向:
安装螺旋桨时,注意螺旋桨转向必须保证推力向上,风向下推
进。
凸面为迎风面,对于四轴来说,就是凸面朝上。
电子调速器(ESC)
因为电池输入的是直流电,电流需要电子调速器将其变成三相交
流电,还需要从遥控器接收机那里接收控制信号,控制电机的转
速
输入信号:红黑(粗)电源线、黑白(细)信号线,自飞控
输出信号:三相信号,电机
飞控(Flight controller)
最重要的用途就是通过软件算法,解析飞行器姿态,修正由于飞
行器安装、外界干扰、零件之间的不一致等原因形成的姿态异
常。
通过PID (the primary correction error (P), the error over time (I), and the instantaneous error (D)) 控制调节
飞行器。
1、P产生响应速度,过小响应慢,过大会产生振荡,是I和D的基础
2、I消除偏差、提高精度(在有系统误差和外力作用时),同时
增加了响应速度
3、D抑制过冲和振荡,同时减慢了响应速度
飞控是飞行器的核心,连接各设备。
飞控上连接有:
ESC
电源
解锁开关
PPM(或其他)编码线,编码线连接遥控器接收
GPS
数传
pixhawk飞控
快速使用指南
官网:
APM飞控
CC3D飞控
接线:
遥控器与接收机
上下:油门throttle,左右:倾侧roll,前后:俯仰pitch,旋转:航向yew
Yaw <> Rudder----- Rotates aricraft around vertical axis, spins it around
Pitch <> Elevator ------- The nose of the aircraft goes up and down
Roll <> Aileron -------- The left or right sides of the aircraft go up and down
其他设置详见说明书。
总接线图
地面站
地面站在飞行器组装完成后,用于调试飞行器与遥控器。
见
CC3D飞控软件设置
与飞行器进行数据传输,向飞行器发送位置、高度等各类信息,飞行器向地面站反馈相关信息。
pixhawk地面站
设置与使用详见pixhawk用户手册v1.0
CC3D地面站
获取网址:
指导帖:
视频教程:
模拟工具
模拟工具用来练习飞行。
PhoenixRC v4.0.m
软件位置:E:\飞行器模拟软件\A盘\A\PhoenixRC。