第4章存储器3
- 格式:ppt
- 大小:310.00 KB
- 文档页数:47
第四章存储器管理第一部分教材习题(P159)15、在具有快表的段页式存储管理方式中,如何实现地址变换?答:在段页式系统中,为了便于实现地址变换,须配置一个段表寄存器,其中存放段表始址和段长TL。
进行地址变换时,首先利用段号S,将它与段长TL进行比较。
若S<TL,表示未越界,利用段表始址和段号来求出该段所对应的段表项在段表中的位置,从中得到该段的页表始址,并利用逻辑地址中的段内页号P来获得对应页的页表项位置,从中读出该页所在的物理块号b,再利用块号b和页内地址来构成物理地址。
在段页式系统中,为了获得一条指令或数据,须三次访问内存。
第一次访问内存中的段表,从中取得页表始址;第二次访问内存中的页表,从中取出该页所在的物理块号,并将该块号与页内地址一起形成指令或数据的物理地址;第三次访问才是真正从第二次访问所得的地址中,取出指令或数据。
显然,这使访问内存的次数增加了近两倍。
为了提高执行速度,在地址变换机构中增设一个高速缓冲寄存器。
每次访问它时,都须同时利用段号和页号去检索高速缓存,若找到匹配的表项,便可从中得到相应页的物理块号,用来与页内地址一起形成物理地址;若未找到匹配表项,则仍须再三次访问内存。
19、虚拟存储器有哪些特征?其中最本质的特征是什么?答:虚拟存储器有以下特征:多次性:一个作业被分成多次调入内存运行,亦即在作业运行时没有必要将其全部装入,只需将当前要运行的那部分程序和数据装入内存即可;以后每当要运行到尚未调入的那部分程序时,再将它调入。
多次性是虚拟存储器最重要的特征,任何其他的存储器管理方式都不具有这一特征。
因此,认为虚拟存储器是具有多次性特征的存储器系统。
对换性:允许在作业的运行过程中进行换进、换出,也即,在进程运行期间,允许将那些暂不使用的程序和数据,从内存调至外存的对换区(换出),待以后需要时再将它们从外存调至内存(换进);甚至还允许将暂不运行的进程调至外存,待它们重又具备运行条件时再调入内存。
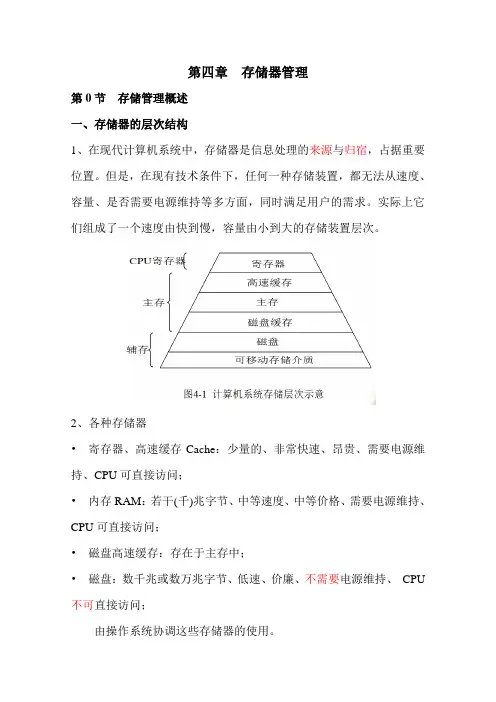
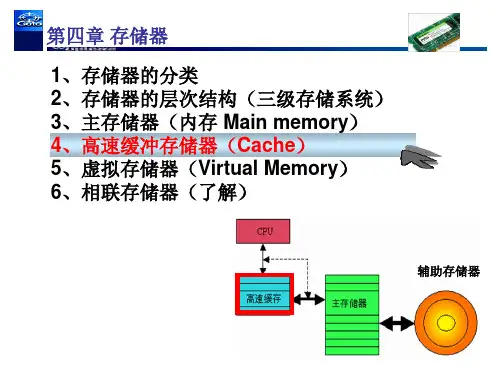
第四章存储器管理第0节存储管理概述一、存储器的层次结构1、在现代计算机系统中,存储器是信息处理的来源与归宿,占据重要位置。
但是,在现有技术条件下,任何一种存储装置,都无法从速度、容量、是否需要电源维持等多方面,同时满足用户的需求。
实际上它们组成了一个速度由快到慢,容量由小到大的存储装置层次。
2、各种存储器•寄存器、高速缓存Cache:少量的、非常快速、昂贵、需要电源维持、CPU可直接访问;•内存RAM:若干(千)兆字节、中等速度、中等价格、需要电源维持、CPU可直接访问;•磁盘高速缓存:存在于主存中;•磁盘:数千兆或数万兆字节、低速、价廉、不需要电源维持、CPU 不可直接访问;由操作系统协调这些存储器的使用。
二、存储管理的目的1、尽可能地方便用户;提高主存储器的使用效率,使主存储器在成本、速度和规模之间获得较好的权衡。
(注意cpu和主存储器,这两类资源管理的区别)2、存储管理的主要功能:•地址重定位•主存空间的分配与回收•主存空间的保护和共享•主存空间的扩充三、逻辑地址与物理地址1、逻辑地址(相对地址,虚地址):用户源程序经过编译/汇编、链接后,程序内每条指令、每个数据等信息,都会生成自己的地址。
●一个用户程序的所有逻辑地址组成这个程序的逻辑地址空间(也称地址空间)。
这个空间是以0为基址、线性或多维编址的。
2、物理地址(绝对地址,实地址):是一个实际内存单元(字节)的地址。
●计算机内所有内存单元的物理地址组成系统的物理地址空间,它是从0开始的、是一维的;●将用户程序被装进内存,一个程序所占有的所有内存单元的物理地址组成该程序的物理地址空间(也称存储空间)。
四、地址映射(变换、重定位)当程序被装进内存时,通常每个信息的逻辑地址和它的物理地址是不一致的,需要把逻辑地址转换为对应的物理地址----地址映射;地址映射分静态和动态两种方式。
1、静态地址重定位是程序装入时集中一次进行的地址变换计算。
物理地址= 重定位的首地址+ 逻辑地址•优点:简单,不需要硬件支持;•缺点:一个作业必须占据连续的存储空间;装入内存的作业一般不再移动;不能实现虚拟存储。

第四章存储系统4.1概述4.1.1技术指标4.1.2层次结构4.1.3存储器分类存储器是计算机系统中的记忆设备,用来存放程序和数据。
构成存储器的存储介质,目前主要采用半导体器件和磁性材料。
一个双稳态半导体电路或一个CMOS晶体管或磁性材料的存储元,均可以存储一位二进制代码。
这个二进制代码位是存储器中最小的存储单位,称为一个存储位或存储元。
由若干个存储元组成一个存储单元,然后再由许多存储单元组成一个存储器。
根据存储材料的性能及使用方法不同,存储器有各种不同的分类方法。
(1)按存储介质分作为存储介质的基本要求,必须有两个明显区别的物理状态,分别用来表示二进制的代码0和1。
另一方面,存储器的存取速度又取决于这种物理状态的改变速度。
目前使用的存储介质主要是半导体器件和磁性材料。
用半导体器件组成的存储器称为半导体存储器。
用磁性材料做成的存储器称为磁表面存储器,如磁盘存储器和磁带存储器。
(2)按存取方式分如果存储器中任何存储单元的内容都能被随机存取,且存取时间和存储单元的物理位置无关,这种存储器称为随机存储器。
半导体存储器是随机存储器。
如果存储器只能按某种顺序来存取,也就是说存取时间和存储单元的物理位置有关,这种存储器称为顺序存储器。
如磁带存储器就是顺序存储器,它的存取周期较长。
磁盘存储器是半顺序存储器。
(3)按存储器的读写功能分有些半导体存储器存储的内容是固定不变的,即只能读出而不能写入,因此这种半导体存储器称为只读存储器(ROM)。
既能读出又能写人的半导体存储器,称为随机读写存储器(RAM)。
(4)按信息的可保存性分断电后信息即消失的存储器,称为非永久记忆的存储器。
断电后仍能保存信息的存储器,称为永久性记忆的存储器。
磁性材料做成的存储器是永久性存储器,半导体读写4.2 半导体随机读写存储器主存储器由半导体存储芯片构成,容量较小时可采用SRAM芯片,容量较大时一般采用DRAM芯片。
主存中的固化区采用ROM芯片,包括PROM、EPROM、EEPROM、等。
操作系统第四章课后答案第四章存储器管理1. 为什么要配置层次式存储器?这是因为:a.设置多个存储器可以使存储器两端的硬件能并行工作。
b.采用多级存储系统,特别是Cache技术,这是一种减轻存储器带宽对系统性能影响的最佳结构方案。
c.在微处理机内部设置各种缓冲存储器,以减轻对存储器存取的压力。
增加CPU中寄存器的数量,也可大大缓解对存储器的压力。
2. 可采用哪几种方式将程序装入内存?它们分别适用于何种场合?将程序装入内存可采用的方式有:绝对装入方式、重定位装入方式、动态运行时装入方式;绝对装入方式适用于单道程序环境中,重定位装入方式和动态运行时装入方式适用于多道程序环境中。
3. 何为静态链接?何谓装入时动态链接和运行时动态链接?a.静态链接是指在程序运行之前,先将各自目标模块及它们所需的库函数,链接成一个完整的装配模块,以后不再拆开的链接方式。
b.装入时动态链接是指将用户源程序编译后所得到的一组目标模块,在装入内存时,采用边装入边链接的一种链接方式,即在装入一个目标模块时,若发生一个外部模块调用事件,将引起装入程序去找相应的外部目标模块,把它装入内存中,并修改目标模块中的相对地址。
c.运行时动态链接是将对某些模块的链接推迟到程序执行时才进行链接,也就是,在执行过程中,当发现一个被调用模块尚未装入内存时,立即由OS去找到该模块并将之装入内存,把它链接到调用者模块上。
4. 在进行程序链接时,应完成哪些工作?a.对相对地址进行修改b.变换外部调用符号6. 为什么要引入动态重定位?如何实现?a.程序在运行过程中经常要在内存中移动位置,为了保证这些被移动了的程序还能正常执行,必须对程序和数据的地址加以修改,即重定位。
引入重定位的目的就是为了满足程序的这种需要。
b.要在不影响指令执行速度的同时实现地址变换,必须有硬件地址变换机构的支持,即须在系统中增设一个重定位寄存器,用它来存放程序在内存中的起始地址。
程序在执行时,真正访问的内存地址是相对地址与重定位寄存器中的地址相加而形成的。
第四章 存储器一、 填空题1. 计算机中的存储器是用来存放 的,随机访问存储器的访问速度与 无关。
√2. 主存储器的性能指标主要是 、 存储周期和存储器带宽。
√3. 存储器中用 来区分不同的存储单元,1GB= KB 。
√4. 半导体存储器分为 、 、只读存储器(ROM )和相联存储器等。
√5. 地址译码分为 方式和 方式。
√6. 双译码方式采用 个地址译码器,分别产生 和 信号。
√7. 若RAM 芯片内有1024个单元,用单译码方式,地址译码器将有 条输出线;用双译码方式,地址译码器有 条输出线。
√8. 静态存储单元是由晶体管构成的 ,保证记忆单元始终处于稳定状态,存储的信息不需要 。
√9. 存储器芯片并联的目的是为了 ,串联的目的是为了 。
10. 计算机的主存容量与 有关,其容量为 。
11. 要组成容量为4M×8位的存储器,需要 片4M×1位的存储器芯片并联,或者需要 片1M×8位的存储器芯片串联。
12. 内存储器容量为6K 时,若首地址为00000H ,那么末地址的十六进制表示是。
13 主存储器一般采用 存储器件,它与外存比较存取速度 、成本 。
14 三级存储器系统是指 这三级 、 、 。
15 表示存储器容量时KB= ,MB= ;表示硬盘容量时,KB= ,MB=。
16一个512KB 的存储器,其地址线和数据线的总和是 。
17 只读存储器ROM 可分为 、 、 和 四种。
18 SRAM 是 ;DRAM 是 ;ROM 是 ;EPROM 是 。
19半导体SRAM 靠 存储信息,半导体DRAM 则是靠 存储信息。
20半导体动态RAM 和静态RAM 的主要区别是 。
21MOS 半导体存储器可分为 、 两种类型,其中 需要刷新。
22 广泛使用的 和 都是半导体 ③ 存储器。
前者的速度比后者快,但不如后者高,它们的共同缺点是断电后 保存信息。
23 EPROM 属于 的可编程ROM ,擦除时一般使用 ,写入时使用高压脉冲。