交流永磁同步电动机伺服系统的研究
- 格式:doc
- 大小:27.00 KB
- 文档页数:3
《永磁同步电机伺服控制系统的研究》篇一一、引言随着工业自动化和智能制造的快速发展,永磁同步电机(PMSM)因其高效、节能、稳定等优点,在伺服控制系统中得到了广泛应用。
永磁同步电机伺服控制系统作为现代机电一体化技术的重要组成部分,其性能的优劣直接影响到整个系统的运行效率和稳定性。
因此,对永磁同步电机伺服控制系统的研究具有重要的理论意义和实际应用价值。
二、永磁同步电机的基本原理永磁同步电机是一种基于永磁体产生磁场的电机,其工作原理是利用磁场与电流的相互作用,实现电机的转动。
与传统的电机相比,永磁同步电机具有更高的能效比和更稳定的运行性能。
其伺服控制系统主要通过控制器对电机进行精确的控制,实现电机的快速响应和准确位置控制。
三、伺服控制系统的构成及工作原理永磁同步电机伺服控制系统主要由电机本体、驱动器、控制器和传感器等部分组成。
其中,控制器是整个系统的核心,负责接收指令、处理信息并输出控制信号。
驱动器则负责将控制信号转换为电机所需的电能。
传感器则用于实时监测电机的运行状态,将信息反馈给控制器,实现闭环控制。
四、伺服控制系统的关键技术1. 矢量控制技术:通过坐标变换,将三相电流分解为励磁分量和转矩分量,分别进行控制,实现电机的精确控制。
2. 数字控制技术:采用数字信号处理器(DSP)等数字控制器,实现对电机的快速响应和精确控制。
3. 鲁棒控制技术:针对系统的不确定性因素和外界干扰,采用鲁棒控制算法,提高系统的稳定性和抗干扰能力。
4. 智能控制技术:利用人工智能算法,实现对电机的高效、智能控制。
五、伺服控制系统的研究现状及发展趋势目前,永磁同步电机伺服控制系统已广泛应用于机器人、数控机床、航空航天等领域。
随着科技的不断进步,伺服控制系统的研究也在不断深入。
未来,伺服控制系统将更加注重智能化、高效化和绿色化的发展方向。
智能控制算法的应用将进一步提高系统的自适应性、学习能力和决策能力。
同时,高效化和绿色化也将成为伺服控制系统的重要发展方向,通过优化控制算法和改进电机设计,降低系统能耗,提高系统效率。
永磁同步伺服电机(PMSM)的基本结构和控制单元驱动器原理导语:永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。
全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。
随着现代电机技术、现代电力电子技术、微电子技术、永磁材料技术、交流可调速技术及控制技术等支撑技术的快速发展,使得永磁交流伺服技术有着长足的发展。
永磁交流伺服系统的性能日渐提高,价格趋于合理,使得永磁交流伺服系统取代直流伺服系统尤其是在高精度、高性能要求的伺服驱动领域成了现代电伺服驱动系统的一个发展趋势。
永磁交流伺服系统具有以下等优点:电动机无电刷和换向器,工作可靠,维护和保养简单;定子绕组散热快;惯量小,易提高系统的快速性;适应于高速大力矩工作状态;相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。
永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。
全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。
现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。
伺服驱动器有两部分组成:驱动器硬件和控制算法。
控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。
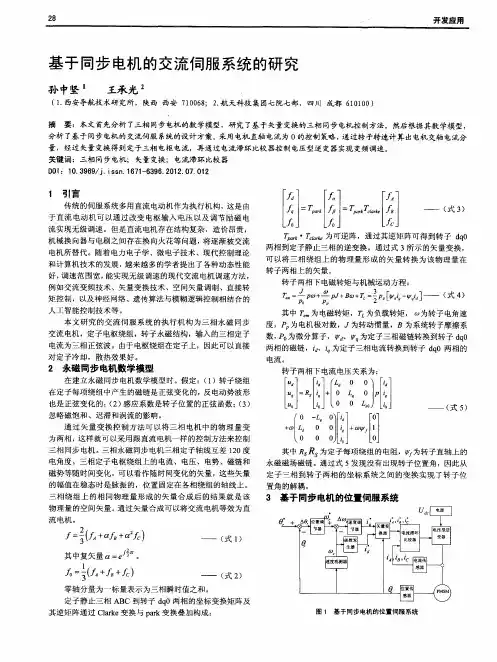
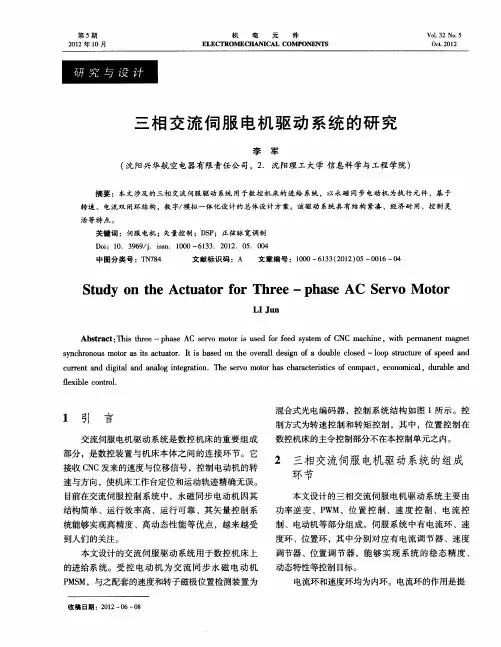
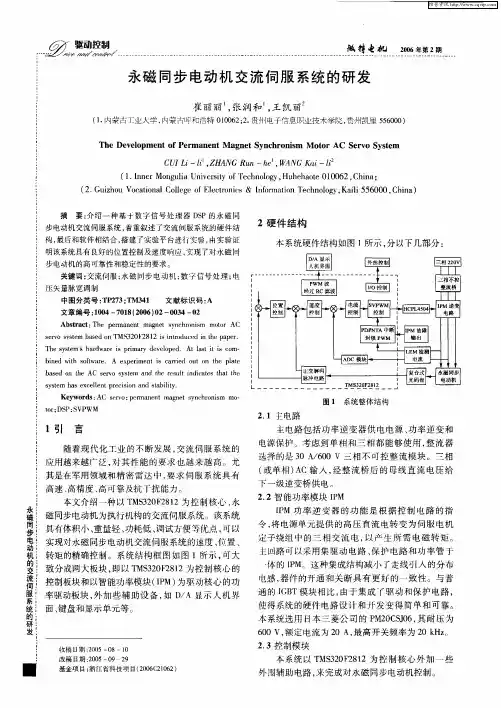
交流永磁伺服系统的基本结构交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。
其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。
摘 要直线电机在各行各业中发挥着越来越重要的作用,特别是在机床进给驱动系统中。
本文以平板式交流永磁同步直线电机为研究对象,从电机机体到伺服驱动系统的软、硬件设计作了深入研究。
本文首先介绍了交流永磁同步直线电机机体设计过程中电枢绕组、铝芯和定子磁钢的设计和改进方法,较大程度上减小了推力波动,并且结合大推力直线电机的特点设计了方便有效的装配过程。
建立交流永磁同步直线电机的数学模型,在此基础上分析了当今最通用的伺服控制策略,选择了矢量控制方法。
确定0 d i 的矢量控制实现形式。
通过SVPWM 方法进行脉宽调制,合成三相正弦波。
选用TI 公司2000系列最新DSP TMS320F2812,深入研究了以上算法在DSP 中的实现形式。
采用了C 语言和汇编语言混合编程的实现方法。
在功率放大装置中,以智能功率模块IPM 为核心,设计了功率伺服驱动系统。
还包括电流采样、光电隔离、过压欠压保护和电源模块等。
由于知识和能力的限制,本次课题只对直线电机做一些理论研究。
关键词:永磁同步直线电机 DSP SVPWM 矢量控制AbstractLine motors are playing a more and more important role in all kinds of trade ,especially in machine tool feed system. We carry out our study in motor , softwareand hardware servo system based on flat AC permanent magnet synchronous linearmotor(PMSLM).First introduce the design method of armature ,core of al and magnet whichcan minish the thrust ripples, then introduce the means of assembly base on highthrust permanent magnet synchronous motors.To ensure the accuracy to a high requirements and get a wide speed range, wechoose the dsp of Texas Instruments named TMS320F2812 which is the core of theservo system .In the paper we set up mathematical model of PMSLM, then analysethe current control strategies and choose the vector control method which is realizedby the method of 0 d i .The three phase sine wave is compounded by spacevoltage pulse width modulation(SVPWM).The arithmetic realized by C language andassembly language in DSP. Intelligent Power Model (IPM) is the core of the poweramplification circuit system which also contains current sampling circuit,photoelectric-isolation circuits, over-voltage protection circuits, under-voltageprotection circuits and power supply.As a result of the knowledge and ability limit, this topic only does a fundamentalresearch to the linear motor.Key words: permanent magnet synchronous linear motor(PMSLM), DSP,SVPWM, vector control目录摘要中文 (I)英文 (II)第一章绪论 (I)1.1 研究背景和意义 (1)1.2 直线电机的运行原理及特点 (2)1.2.1 直线电机的基本运行原理 (2)1.2.2 直线电机进给系统优缺点分析 (3)1.3 直线电机发展历史及其伺服控制系统的研究综述 (4)1.3.1 国内外直线电机历史、现状及发展 (4)1.3.2 直线电机伺服控制系统的研究综述 (7)1.3.3 试验研究 (10)1.4 本文主要研究内容 (10)第二章永磁永磁直线同步电机基本结构 (11)2.1 实验用交流永磁同步电机基本结构........................................................ 错误!未定义书签。
交流伺服电机的控制研究摘要:随着科学技术的不断发展和计算机技术的不断进步,以及现代控制理论的不断创新,交流伺服系统作为现代主力驱动设备,在机器人、数控机床和航空航天等领域发挥着越来越重要的作用,是现代化工业生产不可或缺的一部分。
因此对于电机控制的要求也越来越严格和多样。
本文以交流伺服电机的控制为题,简单介绍几种电机控制的方法。
关键词:交流伺服电机;矢量控制;永磁同步电机;直接转矩控制0 前言交流伺服电机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf 上;另一个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机又称两个伺服电动机[1]。
20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。
交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。
90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。
交流伺服驱动装置在传动领域的发展日新月异。
1 交流伺服系统的现状与发展方向1.1 交流伺服控制系统的现状伺服控制系统虽然应用已久,大量应用于结构简单的直流电机,在结构复杂的交流电机应用中还无法达到人们理想的效果,使得应用受到限制。
由于直流电机控制简单,长期应用于各种领域。
直到年,德国西门子工程师提出了矢量控制方法,将交流电机解耦后再控制,使交流电机能够和直流电机的控制性能有极高的相似之处,解决了长期阻碍交流电机发展的控制问题。
交流电机冰开始广泛在伺服控制领域应用起来,未来必将取代直流电机,在伺服控制领域中占主导地位。
由于各项相关技术理论的进一步完善,应用不断深入,验证了交流伺服系统的稳定性。
发达国家的电器公司在伺服控制领域,直流电机已经由交流电机完全代替。
《永磁同步电机伺服控制系统的研究》篇一一、引言随着现代工业的快速发展,对于精确、快速和可靠的驱动控制系统需求日益增加。
其中,永磁同步电机(PMSM)伺服控制系统因其高效率、高精度和高动态响应等优点,在机器人、数控机床、航空航天等领域得到了广泛应用。
本文旨在研究永磁同步电机伺服控制系统的相关技术及其应用。
二、永磁同步电机基本原理永磁同步电机(PMSM)是一种利用永磁体产生磁场并由电机电流进行励磁控制的电机。
其工作原理是:当电机通电时,定子中的电流产生磁场,与转子上的永磁体相互作用,产生力矩,驱动电机转动。
PMSM具有高效率、高功率密度和良好的控制性能等特点。
三、伺服控制系统设计伺服控制系统是PMSM的核心部分,主要包括电流环、速度环和位置环三部分。
在伺服控制系统中,需要采用先进的控制策略和算法,以实现对电机的高精度控制。
(一)电流环设计电流环是伺服控制系统的内环,负责控制电机的电流。
为了实现高精度的电流控制,需要采用数字PID控制器等先进控制策略。
此外,还需要考虑电机的参数变化和外部干扰等因素对电流环的影响。
(二)速度环设计速度环是伺服控制系统的中环,负责控制电机的速度。
为了实现快速、平稳的速度控制,需要采用矢量控制等先进的控制策略。
此外,还需要考虑电机的负载变化和机械系统的动态特性等因素对速度环的影响。
(三)位置环设计位置环是伺服控制系统的外环,负责控制电机的位置。
为了实现高精度的位置控制,需要采用先进的算法和传感器技术。
同时,还需要考虑机械系统的非线性因素和外部干扰等因素对位置环的影响。
四、先进控制策略研究为了进一步提高伺服控制系统的性能,需要研究先进的控制策略和算法。
其中包括:无差拍控制、滑模变结构控制、神经网络控制和模糊控制等。
这些先进的控制策略可以有效地提高系统的动态性能、鲁棒性和适应性。
五、应用研究永磁同步电机伺服控制系统在机器人、数控机床、航空航天等领域有着广泛的应用。
其中,在机器人领域,PMSM伺服控制系统可以实现高精度的位置控制和速度控制,提高机器人的工作效率和精度;在数控机床领域,PMSM伺服控制系统可以实现高精度的加工和定位,提高产品的加工精度和质量;在航空航天领域,PMSM伺服控制系统可以实现高精度的姿态控制和轨迹跟踪等任务。
永磁交流伺服系统研究背景意义及现状1研究背景及意义伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标或给定值任意变化的自动控制系统,是控制理论、电力电子技术、电机技术、微电子技术、检测技术等学科相互发展融合的产物,是自动化学科及工业生产领域重要的分支。
在机械制造行业、冶金工业,交通运输以及军事上都得到了广泛的应用。
伺服系统强调对控制命令的快速跟踪和响应,所以伺服控制系统可以认为是随动控制系统,既可以是转速的随动控制,也可以是位置的随动控制。
在广义的角度上看,电动机的调速系统也可以认为是伺服控制的一种,只不过在调速系统中,强调的被调量是电动机的转速,更加有效的实现功率变换。
而伺服系统则强调忠实跟踪给定信号,即按控制器发出的控制命令而动作,并产生足够的力或力矩,使被驱动的机械获得期望的运动速度和位姿。
伺服系统的发展经历了由液压伺服到电气伺服的过程。
在电气伺服系统中,按驱动装置的执行元件电动机类型来分,通常分为直流伺服系统和交流伺服系统两大类。
六十年代以后,特别是七十年代以来,随着电力电子学、微电子学、传感技术、永磁技术和控制理论的惊人发展,尤其是先进控制策略的成功应用,交流伺服系统的研究和应用取得了举世瞩目的发展,己具备良好的技术性能,其动、静态特性已完全可与直流伺服系统相媲美,交流伺服系统取代直流伺服系统己成定局。
其中交流永磁同步电机 (PMSM)又以其结构简单、气隙磁密高、功率密度大、转动惯量小的优点,成为研究的热点。
和直流电机相比,交流永磁同步电机没有直流电机的换向器和电刷等缺点,和其他类型交流电动机相比,它由于没有励磁电流,因而功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好。
现已广泛用于数控机床、工业机器人、超大规模集成电路制造、柔性制造系统、载人宇宙飞船、电动工具以及家用电器等高科技领域。
另一方面,高速数字信号处理芯片(DSP) 的快速发展也对伺服系统的发展起到了推动作用。
《永磁同步电机伺服控制系统的研究》篇一一、引言随着工业自动化和智能制造的快速发展,永磁同步电机(PMSM)因其高效率、高精度和高稳定性等优点,在工业控制系统中得到了广泛应用。
而伺服控制系统作为永磁同步电机的重要组成部分,其性能直接影响到整个系统的稳定性和运行效果。
因此,对永磁同步电机伺服控制系统进行深入研究具有重要意义。
本文将探讨永磁同步电机伺服控制系统的原理、方法及其在实践中的应用。
二、永磁同步电机的基本原理永磁同步电机是一种基于磁场耦合原理的电机,其基本原理是利用定子中的电流产生磁场与转子上的永磁体相互作用,从而实现电机的转动。
PMSM具有结构简单、运行可靠、维护方便等优点,因此在许多领域得到了广泛应用。
三、伺服控制系统的基本原理伺服控制系统是一种基于反馈控制的自动控制系统,其基本原理是通过传感器实时检测电机的位置、速度和力矩等信息,并将这些信息与设定值进行比较,然后根据比较结果调整电机的运行状态,以达到精确控制的目的。
伺服控制系统具有高精度、高速度和高稳定性等特点,是永磁同步电机的重要支撑。
四、永磁同步电机伺服控制系统的研究方法针对永磁同步电机伺服控制系统的研究,主要包括以下几个方面:1. 控制系统设计:包括控制策略的选择、控制器的设计以及参数的调整等。
常见的控制策略包括PID控制、模糊控制、神经网络控制等。
2. 传感器技术:传感器是伺服控制系统的重要组成部分,其精度和响应速度直接影响整个系统的性能。
因此,研究高精度的传感器技术和传感器优化方法具有重要意义。
3. 驱动技术:驱动技术是影响永磁同步电机性能的关键因素之一。
研究新型的驱动技术和优化方法,可以提高电机的运行效率和稳定性。
4. 故障诊断与保护:针对永磁同步电机在运行过程中可能出现的故障,研究有效的诊断方法和保护措施,以确保系统的安全性和可靠性。
五、实践应用永磁同步电机伺服控制系统在许多领域得到了广泛应用,如机床加工、航空航天、新能源等领域。
交流永磁同步电动机伺服系统的研究
[摘要] 目前交流伺服系统取代传统电液伺服系统和直流伺服系统已经成为必然趋势,而永磁同步电动机在交流伺服系统应用过程中发挥着非常重要的作用。
分析了永磁同步电动机的定子结构和转子结构,同时分析了永磁同步电动机的工作原理。
分别简介了永磁同步电动机目前常用的两种控制策略:矢量控制和直接转矩控制,并对两种控制策略进行了分析对比,为永磁同步电动机进一步的深入研究提供了一些理论支持。
[关键词] 伺服系统永磁同步电动机矢量控制直接转矩控制
1、前言
随着现代科学技术特别是电力电子技术、微型计算机技术和控制理论的快速发展,伺服系统作为自动控制系统中的一种重要支柱技术,在许多高科技领域得到了非常广泛的应用[1]。
伴随着、稀土永磁材料与电机控制技术的发展,交流伺服控制技术有了长足的进步,交流伺服系统逐步取代直流伺服系统已成定局。
借助于科学技术的发展,人们有可能并已经初步构成了高精度、快速响应的交流伺服驱动系统。
因此,近年来,世界各国在高精度速度和位置控制场合,都已经由交流电力传动取代电液传动和直流传动。
在交流伺服传动领域中,伺服系统有三种构成形式,其执行元件分别是:感应电动机、无刷直流电动机和三相永磁同步电动机,所构成的伺服系统除以上执行元件外还有:变频装置(整流器和逆变器)、控制系统。
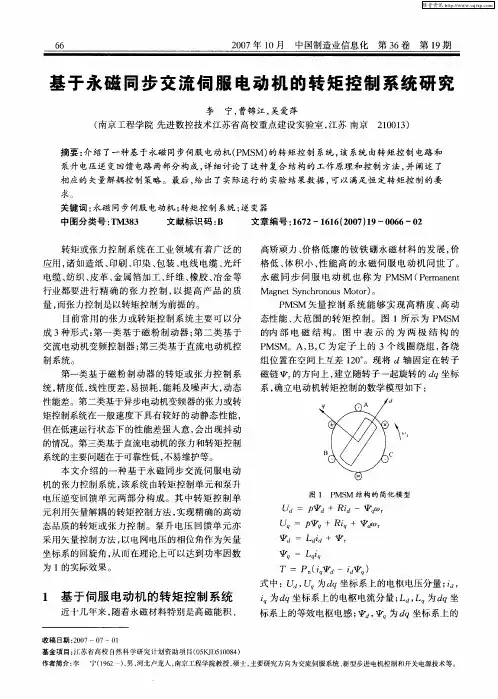
永磁同步电动机具有结构简单、体积小、效率高、功率因数高、转矩电流比高、转动惯量低、易于散热及维护保养等优点,特别是随着永磁材料价格的下降、材料磁性能的提高,以及新型永磁材料的出现,在中小功率、高精度、高可靠性、宽调速范围的伺服系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空、航天、数控机床、加工中心、机器人等场合已获得广泛的应用[2]。
2、永磁同步电动机的工作原理
由于永磁同步电动机转子磁钢的几何形状不同,转子磁场在空间的分布可分为正弦波和梯形波两种,转子旋转在定子上产生的反电动势波形也分为正弦波,梯形波两种,所以永磁同步电机分为正弦波驱动电流的永磁同步电机和方波驱动电流永磁同步电机。
以三相正弦波驱动的永磁同步电动机为例,永磁同步电动机的结构主要包括定子铁心、定子绕组和转子铁心。
定子铁心由冲有槽孔的硅钢片压叠而成,这种结构可以减小电动机运行时的铁耗。
定子绕组是在定子铁心槽中嵌放电枢绕组,常采用分布短距绕组,而且通常接成星形接法以减小电动机杂散损耗。
气隙长度是一个非常关键的尺寸,尽管它对永磁同步电动机的无功电流的影响不如对感应电动机那么敏感,但是它对永
磁同步电动机的交、直轴电抗影响很大,而且气隙长度的大小还对永磁同步电动机的装配工艺和电动机的杂散损耗有着较大的影响。
相比较于定子铁心,转子铁心可以做成实心的,也可以用叠片叠压而成,并且用永磁体取代普通同步电动机的励磁绕组,目前使用较多的永磁材料是采NdFeB(钕铁硼合金)。
永磁同步电动机的三相正弦波电压在定子三相绕组中产生对称的三相电流,在气隙中产生旋转磁场,磁场的角速度为,旋转磁场一边切割定子绕组并在定子绕组中产生感应反电动势,一边与永磁磁极相作用,带动转子与旋转磁场同步旋转。
定子电枢电流还会产生仅与定子绕组相交链的定子绕组漏磁通,并在定子绕组中产生感应漏电动势。
此外转子永磁体产生的磁场以同步转速切割定子绕组,从而产生空载电动势。
当外加负载转矩以后,转子磁场轴线落后定子磁场轴线一个功率角,负载越大,功率角越大,负载太大时就造成失步。
永磁同步电动机在运行中,转速与电枢电流频率严格成正比,否则就失步停转。
因为它的失步问题,所以它不适合重载运行,所以永磁同步电动机广泛用来做为交流伺服系统的主要执行部件[1]。
3、永磁同步电动机伺服系统的控制策略
在伺服传动系统中,实际系统对伺服传动装置的要求一般较高:要求伺服系统定位及跟随误差小;响应速度快;系统响应无超调;负载突变时,伺服系统恢复时间短且无振荡;伺服系统电机调速范围宽;低速时可输出额定转矩甚至超过额定转矩,动态过程中能承受额定转矩几倍冲击负荷及加减速力矩等。
为构成高性能伺服传动系统,首先要选择合适的控制策略,永磁同步电动机的控制策略主要有两种:矢量控制和直接转矩控制[2]。
矢量控制策略是模拟直流电动机的控制,它是基于永磁同步电动机的数学模型,通过解藕,分别控制永磁同步电动机的转矩电流和励磁电流。
它不仅控制电流的大小,而且控制电流的相位。
但该方式应用的前提是需要对电机参数进行正确估算,如何提高参数的准确性一直是研究的课题。
直接转矩控制策略是用空间矢量的分析方法直接在定子坐标系下分析永磁同步电动机的数学模型、控制其磁链和转矩,并把转矩直接作为控制量,借助于两点式调节器产生PWM信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
它在很大程度上解决了矢量控制中计算复杂,特性易受永磁同步电动机参数影响等问题,但由于直接进行两点式调节,不可避免地产生转矩脉动,降低了调速性能【3】。
从理论上讲,矢量控制是建立在被控对象准确的数学模型上,通过控制永磁同步电动机电枢电流实现电磁力矩控制。
电流环的存在,使永磁同步电动机电枢电流动态跟随系统给定,满足实际对象对永磁同步电动机电磁力矩的要求。
电动机实际电流受到其转子位置的实时控制,保证永磁同步电动机电流形成的电枢磁场与转子 d 轴垂直,实际交轴电流和系统控制所需交轴给定电流相等,系统保
证实际负载对象的力矩要求,永磁同步电动机所产生的电磁力矩平稳,电动机可以运行的转速较低,调速范围较宽。
永磁同步电动机启动、制动时,所有电流均用来产生电磁力矩,可以充分利用永磁同步电动机过载能力,提高电机启、制动速度,保证其具有优良的启、制动性能。
直接转矩控制只保证实际力矩与给定力矩的吻合程度,并根据力矩误差、磁链误差及磁链所在扇区,选择主电路器件开关状态,使电机磁链按照所定轨迹运行。
电磁转矩及磁链滞环控制时,电机转矩不可避免地存在脉动,直接影响永磁同步电动机低速运行平稳性和调速范围。
另外,通过永磁同步电动机反电势积分求得定子磁链,这种磁链电压模型在低速时准确性很差,受逆变器死区时间、电机电阻及电压检测误差的影响,影响电机低速运行性能,影响电动机转速运行范围,且电动机静止需要启动时,因其定子初始磁链位置未知,系统无法发出正确的控制信号,电动机启动困难,通常是将电动机转子拉到固定位置再进行启动[2]。
4、结语
本文作者在参考了相关资料的基础上,分析了伺服系统的发展过程和趋势,目前交流伺服系统取代传统电液伺服系统和直流伺服系统已经成为必然趋势,而永磁同步电动机在交流伺服系统应用过程中发挥着非常重要的作用。
分析了永磁同步电动机的定子结构和转子结构,同时分析了永磁同步电动机的工作原理。
最后,分别简介了永磁同步电动机目前常用的两种控制策略:矢量控制和直接转矩控制,并对两种控制策略进行了分析对比,为永磁同步电动机进一步的深入研究提供了一些理论支持。
参考文献:
[1] 刘永飘,基于DSP的永磁交流伺服控制系统开发【D】,西安理工大学硕士学位论文,2006.
[2] 陈荣,永磁同步电机伺服系统研究【D】,南京航空航天大学博士学位论文,2004.
[3] 窦玉东,基于TMS320F240的矢量控制交流调速系统的研究【D】,西安理工大学硕士学位论文,2003.
[4]谷善茂何凤有谭国俊等,永磁同步电动机无传感器控制技术现状与发展【J】,电工技术学报,2009,第24 卷,第11 期:14-20.
[5] 徐艳平,曾光,孙向东,永磁同步电机的直接转矩控制的研究【J】,电力电子技术,2003,第37卷,第3期:15-17.。