第三章刚体平衡
- 格式:ppt
- 大小:2.61 MB
- 文档页数:44
《刚体的平衡》讲义一、什么是刚体在开始探讨刚体的平衡之前,咱们得先明白啥是刚体。
简单来说,刚体就是在受力作用下形状和大小都不会改变的物体。
想象一下一块坚硬的钢板,不管你怎么推它、拉它,它的尺寸和形状都不会发生变化,这就是刚体。
但要注意,刚体只是一个理想化的模型。
在现实世界中,完全不变形的物体是不存在的。
不过,在很多情况下,当物体的变形非常小,可以忽略不计时,我们就可以把它近似地看作刚体,这样能让我们的研究和计算变得简单很多。
二、刚体平衡的条件要让一个刚体处于平衡状态,需要满足两个条件:合力为零和合力矩为零。
先来说说合力为零。
这就好比一个人在水平方向上同时受到向左和向右的两个大小相等的力,这两个力就相互抵消了,合力为零。
在刚体上,如果作用在它上面的所有力在各个方向上的合力都为零,那么刚体就不会在力的作用下发生平动,也就是不会沿着直线加速移动。
再讲讲合力矩为零。
矩呢,简单理解就是力乘以力臂。
如果一个刚体受到的所有力产生的力矩之和为零,那么刚体就不会发生转动。
比如说,一个跷跷板两端坐的人的重量乘以他们到支点的距离相等,跷跷板就不会转动,处于平衡状态。
只有同时满足合力为零和合力矩为零这两个条件,刚体才能真正地处于平衡状态。
三、刚体平衡的例子生活中有很多刚体平衡的例子。
比如说,一个静止在水平地面上的桌子。
桌子受到重力,方向竖直向下,地面给它的支持力,方向竖直向上,这两个力大小相等、方向相反,合力为零。
同时,关于桌子的任意一点,重力产生的力矩和支持力产生的力矩也相互抵消,合力矩为零,所以桌子能稳稳地静止在那里。
再比如,一个悬挂着的吊灯。
吊灯受到重力,绳子对它的拉力,这两个力大小相等、方向相反,合力为零。
而且,以悬挂点为参考点,重力产生的力矩和拉力产生的力矩也相等,合力矩为零,吊灯就不会晃动,保持平衡。
四、刚体平衡在工程中的应用在工程领域,刚体平衡的知识可是非常重要的。
比如说建筑结构的设计。
一座大楼要稳稳地矗立在那里,就得保证它的各个部分所受到的力满足刚体平衡的条件。
![刚体力学[感悟]](https://uimg.taocdn.com/34c827ff988fcc22bcd126fff705cc1755275fae.webp)
第三章刚体力学本章介绍刚体运动状态的描述(§3.1-§3.2)以及刚体受力与运动状态的关系(§3.3-§3.10)。
其内容包括:刚体运动学、刚体静力学和刚体动力学,重点掌握刚体运动学和刚体动力学。
刚体是指在任何情况下形状、大小都不发生变化的力学体系,它是一种理想物理模型,只要一个物体中任意两点的距离不因受力而改变,它就可以称为刚体。
§3.1 刚体运动的分析一、描述刚体位臵的独立变量刚体的特性是任意两点距离不因受力而变。
这种特性决定了确定刚体的位臵并不需要许多变量,而只要少数变量就行。
能完全确定刚体位臵的,彼此独立的变量个数叫刚体的自由度。
二、刚体运动的分类及其自由度1、平动:自由度3,可用其中任一点的坐标x、y、z描述;2、定轴转动:自由度1,用对轴的转角φ描述;3、平面平行运动:自由度3,用基点的坐标(x o,y o)及其对垂直平面过基点的轴的转角φ描述。
4、定点转动:自由度3,用描述轴的方向的θ,ψ角和轴线的转角ψ描述。
5、一般运动:自由度6,用描述质心位臵的坐标(x c,y c,z c)和通过的定点的轴的三个角(θ,φ,ψ)描述。
§3.2 角速度矢量、角速度矢量及其与刚体中任本节重点是:掌握角位移矢量一点的线位移、线速度的相互关系。
理解有限转动时角位移不是矢量,只有无限小角位移才是矢量。
一、有限转动与无限小转动1、有限转动不是矢量,不满足对易律2、无限小转动是矢量,它满足矢量对易律。
①线位移△r与无限小角位移△n的关系设转轴OM,有矢量△n,其大小等于很小的转角Δθ,方向沿转轴方向,转轴的方向与刚体转动方向成右手螺旋,则△n称为角位移矢量。
由图3.2.1很容易求得即线位移△r=角位移△n与位矢r的矢量积。
②角位移和△n满足矢量对易律利用两次位移的可交换性,可证得该式表明:微小转动的合成遵循平行四边形加法的对易律,从而无限小角位移△n是一个矢量。
刚体的平衡条件刚体是指物体内部各点之间相对位置保持不变的物体。
在物理学中,平衡是指物体处于静止状态或匀速直线运动状态,没有受到任何净外力或净外力矩的作用。
刚体的平衡条件是判断刚体是否处于平衡状态的基本依据。
一、1. 力的平衡条件当一个刚体处于力的平衡状态时,即刚体上所有力的合力等于零。
根据牛顿第二定律,力的合力等于物体质量乘以加速度,而刚体处于平衡状态时,加速度为零,则合力也必须为零。
2. 转矩的平衡条件除了要求刚体上所有力的合力为零外,还要求刚体上所有力对一个点的转矩(力矩)的合为零,即刚体在绕该点转动时,总的转动效果为零。
转矩是由作用在刚体上的力产生的,在计算转矩时,需要考虑力的大小和施力点到转动中心的距离,转矩的方向可以通过右手定则来确定。
二、刚体平衡条件的应用1. 平衡力分析在实际问题中,可以通过平衡力分析来判断刚体是否处于平衡状态。
平衡力分析是指将所有作用在刚体上的力进行分解和合成,然后判断分解后的力的合力是否为零。
如果合力为零,则刚体处于力的平衡状态。
2. 平衡力矩分析除了分析力的平衡外,还需要分析刚体受力点产生的转矩是否平衡。
对于一个绕平衡点旋转的刚体,可以通过平衡力矩分析来判断刚体是否处于平衡状态。
平衡力矩分析是指将所有作用在刚体上的力分别计算其对平衡点的转矩,然后判断所有转矩的和是否为零。
如果转矩的和为零,则刚体处于平衡状态。
三、刚体平衡条件的应用实例1. 杠杆平衡杠杆是一种应用刚体平衡条件的典型例子。
在杠杆中,一个物体可以通过在不同位置施加力来达到平衡状态。
根据刚体平衡条件,可以根据物体的质量、距离和施力的大小来计算平衡条件。
2. 悬挂物体平衡悬挂物体平衡是指将物体悬挂于绳子或悬挂物上,使其处于平衡状态。
在此过程中,要求物体的重力和拉力达到平衡。
根据刚体平衡条件,可以通过调整悬挂物体的位置或增加绳子的张力来实现平衡。
3. 斜面平衡斜面平衡是指物体静止或匀速滑动于斜面上时的平衡状态。

刚体平衡的条件与原理刚体平衡是物理学中一个重要的概念,它在我们日常生活中起着重要的作用。
本文将探讨刚体平衡的条件与原理。
一. 刚体平衡的条件在静力学中,刚体平衡有三个基本条件,分别是:力的平衡、力矩的平衡和物体自身的刚体平衡。
1. 力的平衡:刚体平衡的第一个条件是力的平衡。
力的平衡指的是合力等于零,即F=0。
合力是指作用在物体上的所有力的矢量和,当合力等于零时,物体所受的合力为零,即物体不会发生线性运动。
2. 力矩的平衡:刚体平衡的第二个条件是力矩的平衡。
力矩是力对绕某一轴旋转的作用效果,它是力乘以力臂的乘积。
力矩的平衡指的是物体对某一轴的力矩之和等于零,即ΣM=0。
力矩的平衡条件保证了物体不会发生旋转。
3. 物体自身的刚体平衡:刚体平衡的第三个条件是物体自身的刚体平衡。
物体自身的刚体平衡指的是物体内部各个点的重力矩之和等于零,即ΣMg=0。
这个条件使得整个物体能够保持平衡状态,不会发生倾斜或倒塌。
二. 刚体平衡的原理刚体平衡的原理可以通过牛顿第一定律来解释。
牛顿第一定律也被称为惯性定律,它说明了一个物体如果不受外力作用,将保持静止或匀速直线运动的状态。
根据牛顿第一定律,当物体处于平衡状态时,合外力和合外力矩均为零,即物体没有受到外界的推动或扭矩作用。
刚体平衡的原理还可以通过刚体的受力分析来解释。
在刚体平衡的情况下,作用在刚体上的所有力矢量的矢量和等于零,即ΣF=0。
根据受力分析,可以确定刚体平衡的条件,并通过力的平衡和力矩的平衡来解决相关问题。
总结:刚体平衡的条件与原理是物理学中的重要概念,它们帮助我们理解物体在平衡状态下的行为。
力的平衡、力矩的平衡和物体自身的刚体平衡是刚体平衡的基本条件。
这些条件保证了物体不会发生线性运动、旋转以及倾斜倒塌等现象。
牛顿第一定律和刚体的受力分析是解释刚体平衡原理的重要工具。
通过理解刚体平衡的条件与原理,我们能够更好地理解和应用力学原理,解决相关问题。
刚体平衡刚体在平衡状态下的力学条件刚体平衡及其力学条件刚体平衡是力学中的重要概念,指的是刚体处于不发生任何平动或转动的静止状态。
在刚体平衡的情况下,存在一系列力学条件。
本文将详细介绍刚体平衡的力学条件。
一、平衡定义在力学中,平衡指物体处于静止状态或匀速直线运动状态下,若外力对物体的合力等于零,则称物体处于平衡状态。
二、刚体平衡条件在刚体平衡的情况下,需要满足以下条件:1. 力矩平衡条件刚体平衡的一个重要条件是力矩平衡,即刚体所受外力的合力矩等于零。
力矩是力作用在刚体上产生的转动效果,用向量表示为M=rxF,其中r为力到转轴的距离,F为力的大小。
在刚体平衡的情况下,力矩的代数和为零。
2. 力平衡条件力平衡指刚体所受外力的合力等于零。
在刚体平衡的状态下,所有作用在刚体上的外力矢量的代数和为零,即ΣF=0。
3. 质心条件刚体平衡的另一个条件是质心条件。
刚体的质心是指刚体所有质点质量乘以各自位置矢量的代数和除以总质量。
在刚体平衡的情况下,质心在不受力的作用下保持静止或匀速直线运动。
三、刚体平衡实例以下是几个常见的刚体平衡实例,用于帮助理解力学条件:1. 杆的平衡考虑一个平衡在水平地面上的杆,支点在一个端点。
要使杆保持平衡,支点需要施加一个反作用力,使得另一端的力矩和受力的合力为零。
2. 平板的平衡当一个平板平衡在平面上时,平衡条件要求所受合力和合力矩都为零。
其中合力矩的计算需要考虑平板上各个点的力矩大小和方向。
3. 悬挂物体的平衡考虑一个静止的悬挂物体,例如一个吊钩。
要使其保持平衡,需要使得悬挂点所受合力和合力矩为零。
四、刚体平衡的应用刚体平衡的概念和力学条件在生活和工程中有广泛的应用。
例如:1. 建筑物的稳定性分析在建筑物的设计和构建过程中,需要考虑其结构的稳定性。
通过分析各个部分的受力和力矩平衡情况,可以确保建筑物在负载和地震等外力作用下保持平衡和稳定。
2. 机械结构的设计机械系统中的各个部件也需要满足力学条件,以保证整个系统的平衡和运行。
刚体平衡实验的操作指南引言:刚体平衡实验是物理学中的经典实验之一,通过该实验可以研究物体的平衡条件和力的作用规律。
下面将为大家介绍刚体平衡实验的操作指南,希望对大家掌握实验技巧和科学原理有所帮助。
一、实验准备在进行刚体平衡实验之前,需要做好一些准备工作。
首先,选择一个稳定平整的实验台面,确保实验台面无扰动;同时,清洁实验仪器,确保其表面平整无污垢,以免对实验结果产生干扰。
二、测量刚体的质量在进行刚体平衡实验之前,首先要测量刚体的质量。
使用天平将刚体放置在平衡盘上,注意天平的准确度,保持天平平稳,避免外界干扰。
记录下刚体的质量,作为后续实验计算所需的数据。
三、悬挂刚体接下来,需要将刚体悬挂起来。
选择一个合适的位置,在实验台的某一边缘固定住一根细绳子,然后将刚体绑在绳子的另一端。
注意绳子的长度应该足够长,以确保刚体完全悬挂且不与实验台面接触。
四、调整刚体位置调整刚体的位置是实验中非常重要的一步,它直接影响到后续实验的精确度和准确度。
通过移动实验台或者调整悬挂绳子的位置,使得刚体处于平衡状态,即不受任何额外力的作用。
在调整刚体位置的同时,观察刚体是否在平衡状态下保持静止,以此来判断刚体是否完全平衡。
五、测量刚体的长度和角度测量刚体的长度和角度是刚体平衡实验中的重点。
使用合适的测量工具(如卡尺、量角器等),测量刚体的长度和相对于实验台面的角度。
记录下这些测量值,以备后续实验数据的分析和计算。
六、应用力学原理分析数据通过上述的实验操作,我们已经获得了刚体平衡实验所需的数据。
现在,我们可以将这些数据应用到力学原理中,进一步分析实验结果。
根据刚体平衡的条件,我们可以得出平衡时刚体所受力的平衡方程式,从而求解未知量,检验实验结果的准确性。
七、误差分析与讨论在进行刚体平衡实验时,由于实际操作中的各种因素,如测量误差、悬挂绳的不完全理想性等,都可能对实验结果产生一定的影响。
因此,在实验结束后,进行误差分析与讨论是非常重要的。
高中物理刚体平衡教案主题:刚体的平衡目标:1. 了解刚体的定义和性质;2. 掌握刚体的平衡条件;3. 能够应用刚体平衡条件解决相关问题。
一、引入1. 引导学生回想一下什么是刚体,并让他们说出刚体的性质。
2. 提出一个问题:在日常生活中有哪些例子符合刚体的定义?二、概念讲解1. 介绍刚体的定义:不发生形变的物体。
2. 解释刚体的平衡条件:外界合力为零,外界合力矩为零。
3. 引导学生通过实例理解刚体平衡条件的实际应用。
三、练习与讨论1. 给学生提供几个简单的刚体平衡问题,并让他们分组解答。
2. 鼓励学生展示解题思路,并进行讨论。
四、实例分析1. 给学生讲解一个实际应用场景中刚体平衡问题的解决过程。
2. 引导学生独立分析解决类似问题的方法。
五、综合练习1. 提供一些综合性的刚体平衡问题,让学生独立解答。
2. 鼓励学生将所学知识运用到解决实际问题中。
六、总结与拓展1. 回顾本节课所学内容,总结刚体平衡的关键要点。
2. 引导学生思考如何将刚体平衡理论应用到更复杂的情景中。
七、作业布置1. 布置相关练习题目,巩固所学知识。
2. 提出探究问题,引导学生进一步思考。
八、课堂反馈1. 通过课堂随堂测验或口头提问的形式,检验学生对刚体平衡的掌握程度。
2. 对学生的表现进行评价和反馈。
【教学反思】本节课主要通过讲解、练习和分析等多种教学活动,帮助学生全面理解刚体平衡的概念和关键条件,并培养学生解决实际问题的能力。
通过课堂反馈,及时发现学生存在的问题,帮助他们进一步提高。
第3章 静力学平衡问题 §3.1 平衡与平衡条件一、平衡的概念物体的平衡,在工程上是指物体相对于地面保持静止或作匀速直线运动的状态。
平衡是相对于确定的参考系而言的。
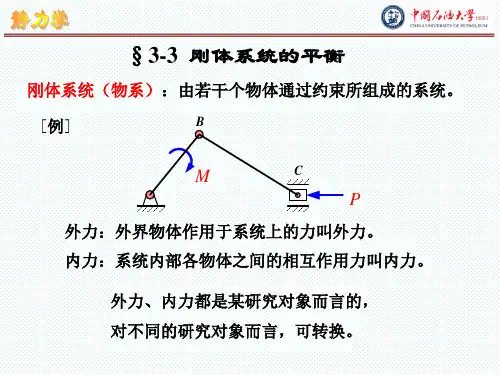
静力学所讨论的平衡问题可以是单个刚体,也可以是由若干个刚体组成的刚体系统。
刚体或刚体系统是否平衡取决于作用在其上的力系。
二、平衡条件要使物体保持平衡状态,作用在其上的力必须满足一定的条件,这种条件我们称为力的平衡条件。
从效应上看,物体保持平衡应是既不移动,又不转动。
因此,力系的平衡条件是,力系的主矢和力系对任一点的主矩等于零。
其解析表达式称为平衡方程。
§3.2 平面力系的平衡方程一、平面力系的平衡方程1)基本形式⎪⎩⎪⎨⎧=∑=∑=∑0)(000F M Y X2)二矩式⎪⎩⎪⎨⎧=∑=∑=∑0)(0)(0F F B A M M X 附加条件为:A 、B 两点连线不垂直于x 轴3)三矩式⎪⎩⎪⎨⎧=∑=∑=∑0)(0)(0)(F F F C B A M M M 附加条件为:A 、B 、C 三点不共线特殊力系的平衡方程 1)共线力系:=∑i F2)平面汇交力系:⎩⎨⎧=∑=∑00Y X3)平面力偶系: 0i m =∑4)平面平行力系: )//( 0)(0轴y M Y i o F F ⎩⎨⎧=∑=∑§3.3 空间力系的平衡方程一、空间力系的平衡方程其基本形式的平衡方程为:ΣX=0 ΣM x(F)=0ΣY=0 ΣM y(F)=0ΣZ=0 ΣM z(F)=0必须指出,空间一般力系有六个独立的平衡方程可以求解六个未知量。
具体应用时,不一定使3个投影轴或矩轴互相垂直,也没有必要使矩轴和投影轴重合,而可以选取适宜轴线为投影轴或矩轴,使每一个平衡方程中所含未知量最少,以简化计算。
此外,还可以将投影方程用适当的力矩方程取代,得到四矩式、五矩式以至六矩式的平衡方程。
使计算更为简便。
几种特殊力系的平衡方程1)空间汇交力系ΣX=0ΣY=0ΣZ=02)空间力偶系ΣM x(F)=0ΣM y(F)=0ΣM z(F)=03)空间平行力系(若各力//z轴)ΣZ=0ΣM x(F)=0ΣM y(F)=04)平面任意力系(若力系在Oxy平面内)∑X==∑YM(=∑F)z§3.4 平衡方程的应用一、一般应用举例例3-1,例3-3,例3-4,例3-5(改求起重机不翻平衡块的重量就应是多少?),例3-6,例3-7 补充:已知:带轮D :D1=400 mm ,FT=2000 N ,Ft=1000 N ;齿轮C :D2=200 mm ,a=20° 求:齿轮C 的啮合力Fn ,轴承A 、B 的约束力FA 、FB轴承A 、B 的约束力FA 、FB 就是圆轴受支座中圆孔的约束力,圆孔销钉就是固定铰链两个分力 为说明两分力方向,建立空间直角坐标系Oxyz ?y 轮轴线,z 轴铅直,Oxy 是水平面,三轴垂直 轴承支座表示方法(下图),其约束两分力为xz 方向,用F Ax 、F Az 和F Bx 、F Bz ,或X A 、Z A 和X B 、Z B 侧视图(将轮轴及其受力投影到Oxz 平面上)受力图,没有画轴承A 、B 的约束力,因为没有解除这两个轴承约束=B M ∑02cos 2221t 1T =⨯⨯⨯D F D F D F n a --2000×200-1000×200-Fncos20°×100=0 Fn=2130 N主视图(将轮轴及其受力投影到Oyz 平面上)受力图,其中Fnz=Fncos20°=2130×0.9396=2000 N因主动力Fnz=2000 N 作用点到A 、B 两个支座距离相同,方向向上显然,与之平衡的两支座约束力大小相等,实际方向向下,和受力图所画的方向相反,所以N10002N 20002-====--nzB A F Z Z俯视图(将轮轴及其受力投影到Oxy 平面上) 受力图,其中Fnx=Fnsin20°=2130×0.3420=729 NΣMA=0 -(FT+Ft)×0.15+Fnx ×0.25-XB ×0.5=0 -(2000+1000)×0.15+729×0.25-XB ×0.5=0 XB=-536 NΣFx=0 -FT-Ft+XA-Fnx+XB=0 -2000-1000+XA-729+(-536)=0 XA=4265 N 结论:Fn=2130 NXA=4265 N ; XB=-536 N ZA=-1000 N ; ZB=-1000 N 小结:①轮轴类部件平面解法:1.侧视图求未知主动力 2.主视图求铅直向约束力 3.俯视图求水平向约束力在每一视图上,使用平面力系力的投影方程和力矩平衡方程求解未知力 ②皮带拉力,无论倾斜与否,总是和轮缘相切,对轮轴的力矩等于拉力乘以半径齿轮啮合力一定和其分度圆不相切,对轮轴的力矩=啮合力×cosa ×半径(啮合力×cosa=圆周方向分力)③侧视图上没有画轴承A 、B 的约束力,因为没有解除两个轴承约束(若画有XA 、ZA 和XB 、ZB 四力) 不能用ΣFx=0,-FT-Ft-Fnsina=0求Fn ,因为在x 方向,实际上还有XA 、XB 两力的投影 二、重心1、物体的重心物体的重量(力):物体每一微小部分地球引力的合力。