UG运动分析教程(中文版)
- 格式:pdf
- 大小:985.96 KB
- 文档页数:41
运动仿真本章主要内容:运动仿真的工作界面运动模型管理连杆特性和运动副机构载荷运动分析9.1 运动仿真的工作界面本章主要介绍UG/CAE 模块中运动仿真的功能。
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG/Modeling 的功能建立一个三维实体模型,利用UG/Motion 的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion 的功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为:1.建立一个运动分析场景;2.进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;3.进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制;4.运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
9.1.1 打开运动仿真主界面在进行运动仿真之前,先要打开UG/Motion(运动仿真)的主界面。
在UG 的主界面中选择菜单命令【Application】→【Motion】,如图9-1 所示。
图9-1 打开UG/Motion 操作界面选择该菜单命令后,系统将会自动打开UG/Motion 的主界面,同时弹出运动仿真的工具栏。
9.1.2 运动仿真工作界面介绍点击Application/Motion 后UG 界面将作一定的变化,系统将会自动的打开UG/Motion的主界面。
该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图9-2 所示。
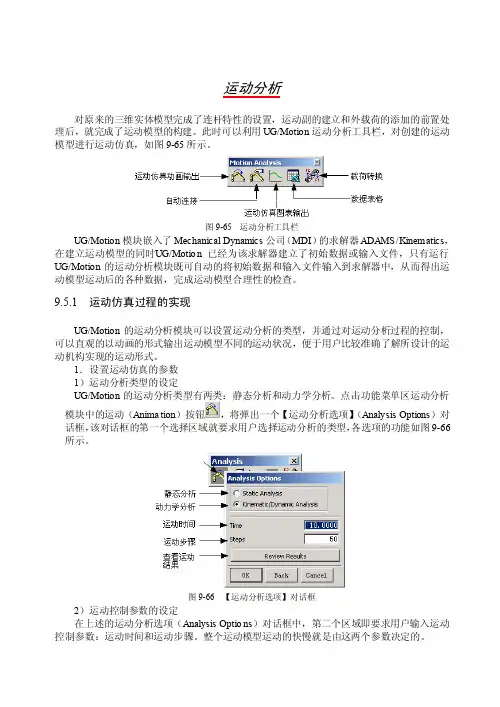
运动分析对原来的三维实体模型完成了连杆特性的设置,运动副的建立和外载荷的添加的前置处理后,就完成了运动模型的构建。
此时可以利用UG/Motion运动分析工具栏,对创建的运动模型进行运动仿真,如图9-65所示。
图9-65 运动分析工具栏UG/Motion模块嵌入了Mecha nical Dynami cs公司(MDI)的求解器AD AMS/Kinema tics,在建立运动模型的同时U G/Motion已经为该求解器建立了初始数据或输入文件,只有运行UG/Motion的运动分析模块既可自动的将初始数据和输入文件输入到求解器中,从而得出运动模型运动后的各种数据,完成运动模型合理性的检查。
9.5.1 运动仿真过程的实现UG/Motion的运动分析模块可以设置运动分析的类型,并通过对运动分析过程的控制,可以直观的以动画的形式输出运动模型不同的运动状况,便于用户比较准确了解所设计的运动机构实现的运动形式。
1.设置运动仿真的参数1)运动分析类型的设定UG/Motion的运动分析类型有两类:静态分析和动力学分析。
点击功能菜单区运动分析模块中的运动(Animat ion)按钮,将弹出一个【运动分析选项】(Analys is Option s)对话框,该对话框的第一个选择区域就要求用户选择运动分析的类型,各选项的功能如图9-66所示。
图9-66 【运动分析选项】对话框2)运动控制参数的设定在上述的运动分析选项(Analys is Option s)对话框中,第二个区域即要求用户输入运动控制参数:运动时间和运动步骤。
整个运动模型运动的快慢就是由这两个参数决定的。
2.运动仿真过程的动画输出及控制1)运动仿真过程的控制设置完了运动分析的参数后,若选择的运动分析类型为静态分析点击OK键,将弹出一个【静态平衡】(Static Equili brium)对话框,如图9-67所示。
「UG运动仿真」完整教程:学习如何进行运动仿真分析,提升设计效率与产品品质UG Motion Simulation Complete Tutorial: Learning How to Conduct Motion Simulation Analysis to Improve Design Efficiency and Product QualityIntroduction:UG Motion Simulation is a powerful tool that can help engineers and designers to analyze and optimize the movement of mechanical systems, such as machines, vehicles, and robots. By simulating the motion of these systems, engineers can identify potential problems and make improvements before the physical prototype is built. This can greatly reduce the cost and time of product development, while improving the quality and reliability of the final product.In this tutorial, we will provide a step-by-step guide to using UG Motion Simulation. We will cover the following topics:1. Setting up the simulation environment2. Creating the motion model3. Defining the motion analysis parameters4. Running the simulation5. Analyzing the results6. Making improvements and optimizationsBy following this tutorial, you will learn how to use UG Motion Simulation to improve your design efficiency and product quality.1. Setting up the simulation environmentBefore we can begin the motion simulation, we need to set up the simulation environment. This involves creating a new simulation file and importing the necessary parts and assemblies.To create a new simulation file, go to the "File" menu and select "New". Then, select "Simulation" from the list of available templates. This will open a new simulation file.Next, we need to import the parts and assemblies that we want to simulate. To do this, go to the "File" menu and select "Import". Then, select the file format of the parts or assemblies that you want to import (such as STEP, IGES, or Parasolid). Once you have selected the file, follow the prompts to import it into the simulation file.2. Creating the motion modelOnce we have set up the simulation environment, we can begin creating the motion model. This involves defining the constraints and connections between the parts and assemblies, and specifying how they will move.To create the motion model, we need to use the "Assembly Constraints" toolbar. This toolbar contains a variety of tools for defining constraints, such as pins, hinges, and sliders.To define a constraint, select the appropriate tool from the toolbar and then select the parts or assemblies that you want to constrain. Follow the prompts to specify the type of constraint and its parameters.Once you have defined all of the necessary constraints, you can begin specifying the motion of the parts and assemblies. To do this, use the "Motion" toolbar. This toolbar contains tools for specifying the motion of parts and assemblies, such as rotating, translating, and oscillating.To specify the motion, select the appropriate tool from the toolbar and then select the parts or assemblies that you want to move. Follow the prompts to specify the type of motion and its parameters.3. Defining the motion analysis parametersOnce we have created the motion model, we need to define the motion analysis parameters. This involves specifying the duration of the simulation, the time step size, and the type of analysis that we want to perform.To define the motion analysis parameters, go to the "Motion Analysis" toolbar. This toolbar contains tools for specifying the analysis parameters, such as the simulation duration, thetime step size, and the type of analysis.To specify the analysis parameters, select the appropriate tool from the toolbar and follow the prompts to specify the parameters.4. Running the simulationOnce we have defined the motion analysis parameters, we can run the simulation. To do this, go to the "Motion Analysis" toolbar and select the "Run" tool. This will begin the simulation.During the simulation, you can monitor the progress of the simulation and view the motion of the parts and assemblies in real-time.5. Analyzing the resultsOnce the simulation is complete, we can analyze the results. This involves reviewing the motion data and identifying potential problems or areas for improvement.To analyze the results, go to the "Results"。

ug 装配动画--ug装配运动分析简介:您可以通过创建序列并插入运动步骤来创建运动分析。
每个运动步骤由一个或多个帧组成。
一个帧代表时间内的一个单位,它是序列中时间的最小单位。
当您正在创建(或者回放)运动,将对您在图形窗口中所看到的每个...您可以通过创建序列并插入运动步骤来创建运动分析。
每个运动步骤由一个或多个帧组成。
一个帧代表时间内的一个单位,它是序列中时间的最小单位。
当您正在创建(或者回放)运动,将对您在图形窗口中所看到的每个运动都生成一个帧。
当组件发生移动时您可以检查碰撞。
如果使用动态间隙检查,您可以选择在碰撞前是否停止运动,如果允许运动继续,则高亮显示碰撞的组件。
运动图标选项选择对象可选择要移动的一个或多个对象(例如,组件或子装配)。
移动对象准备移动所选定的对象时,单击此图标。
出现拖动手柄。
可以用此手柄拖动选定的对象,或者可以使用其它图标选项定义对象将如何运动。
只移动手柄仅移动拖动手柄,例如要移动拖动手柄到一个更便利的位置。
矢量工具可以使用这些选项定义运动的矢量。
选择拖动手柄时,此选项可用。
定义矢量时,选定的对象将重定位,以便选定的拖动手柄与矢量对齐。
有关矢量构造器及其选项的信息,请参见Gateway 帮助。
(所有这些图标均在矢量构造器中显示或打开。
)捕捉手柄至WCS将拖动手柄移到WCS 位置。
此选项只影响手柄,而不移动任何对象。
运动记录首选项打开运动的首选项对话框,可在其中设置影响运动步骤和帧的首选项。
拆卸可以不退出运动记录而拆卸当前组件选择对象。
摄像机创建摄像步骤。
在回放过程中如果您想要重新定位序列视图,则使用此选项(例如,要仔细查看非常大的装配中被拆装的小组件)。
使用操控工具(例如缩放)获取所需的方位,然后选择此选项。
回放摄像顺序步骤时,方位更改为您选择摄像时所处的方位。
确定在适当的时候选择此选项,例如已选择了要移动的对象后。
取消取消运动记录。
首选项对话框选项步长大小计算可以使用此对话框上的选项指定步长大小,或者由系统自动定义步长大小。
第1章 UG NX 9.0基础知识UG NX是一款集CAD/CAM/CAE于一体的3D参数化软件,是当今世界最先进的计算机辅助设计、分析和制造软件。
新版本的UG NX 9.0软件提供了多种新功能和更加强大的工具,便于设计、仿真和制造。
本章将主要介绍UG NX 9.0软件的特点和功能,以及如何设置UG的基本环境,另外详细讲解了各种基本操作内容。
本章学习目的:¾了解UG软件主要技术特点¾了解UG软件各模块的特点¾熟悉UG NX 9.0软件的工作界面¾掌握对象操作和视图操作¾掌握文件操作管理方法¾熟悉UG基本环境的设置方法1.1 UG NX概述与国内使用最多的AutoCAD等通用绘图软件比较,UG NX 软件直接采用了统一数据库、矢量化和关联性处理,以及三维建模同二维工程图相关联等技术,大大节省了用户的实际时间,提高了工作效率。
该软件不仅是一套集成的CAX程序,而且已远远超越了个人和部门生产力的范畴,完全能够改善整体流程以及该流程中每个步骤的效率,因而广泛地应用于航空、航天、汽车、通用机械和造船等工业领域。
1.1.1 UG技术特点UG NX软件系统提供了一个基于过程的产品设计环境,使作时,具有自动推理功能。
同时,在每个操作步骤的过程中,绘图区上方的信息栏和提示栏中将提示操作信息,便于用户做出正确的选择。
2.建模的灵活性UG NX以基于特征(如孔、凸台、槽沟和倒角等)的建模和编辑方法作为实体造型的基础,类似于工程师传统的设计方法,可以用参数驱动。
且该软件具有统一的数据库,真正实现了CAD/CAE/CAM等各个模块之间的无数据交换的自由切换,可以实施并行工程。
此外,该软件采用复合建模技术,可以将实体建模、曲面建模、线框建模、显示几何建模与参数化建模融为一体。
3.集成的工程设计功能UG NX出图功能强,可以十分方便地将三维实体模型生成二维工程图,且可以按照ISO 标准和国标标注尺寸、形位公差和汉字说明等进行操作。
UG运动仿真分析精品课件(一)
近年来,随着计算机科技的快速发展,计算机辅助工程技术在工程领域得到了广泛的应用。
其中,UG运动仿真分析是一种重要的计算机辅助工程技术,它可以模拟现实中的运动和力学行为,为工程师提供重要的设计和优化方案。
而UG运动仿真分析精品课件则是一种快速有效的学习工具,可以帮助工程师掌握这一技术。
UG运动仿真分析精品课件主要包括以下几个部分:
1. UG基础知识介绍。
这一部分主要介绍UG软件的基本结构和功能,并详细介绍UG中的运动仿真分析功能。
2. 运动仿真分析的建模过程。
这一部分主要介绍UG中运动仿真分析的建模流程,包括建立装配体、建模运动和约束关系等。
3. 运动仿真分析的参数设置。
这一部分主要介绍如何设置运动仿真分析的各种参数,包括动力学模拟参数、接触参数、碰撞参数等。
4. 运动仿真分析的结果分析。
这一部分主要介绍如何分析运动仿真分析的结果,包括动画模拟、运动状态曲线、接触压力曲线等。
5. 实例分析。
这一部分主要通过实例分析的方式,展示如何运用UG 运动仿真分析解决实际工程问题。
通过UG运动仿真分析精品课件的学习,工程师可以掌握运动仿真分析的基本知识和技能,并能够在实际工程中应用运动仿真分析技术,优化设计方案、提高产品质量、降低生产成本。
总之,UG运动仿真分析精品课件是一种非常有价值的学习工具,它可
以帮助工程师快速掌握运动仿真分析技术,提高工作效率和工作质量,因此被广泛应用于工程领域。
ug 装配动画--ug装配运动分析简介:您可以通过创建序列并插入运动步骤来创建运动分析。
每个运动步骤由一个或多个帧组成。
一个帧代表时间内的一个单位,它是序列中时间的最小单位。
当您正在创建(或者回放)运动,将对您在图形窗口中所看到的每个...您可以通过创建序列并插入运动步骤来创建运动分析。
每个运动步骤由一个或多个帧组成。
一个帧代表时间内的一个单位,它是序列中时间的最小单位。
当您正在创建(或者回放)运动,将对您在图形窗口中所看到的每个运动都生成一个帧。
当组件发生移动时您可以检查碰撞。
如果使用动态间隙检查,您可以选择在碰撞前是否停止运动,如果允许运动继续,则高亮显示碰撞的组件。
运动图标选项选择对象可选择要移动的一个或多个对象(例如,组件或子装配)。
移动对象准备移动所选定的对象时,单击此图标。
出现拖动手柄。
可以用此手柄拖动选定的对象,或者可以使用其它图标选项定义对象将如何运动。
只移动手柄仅移动拖动手柄,例如要移动拖动手柄到一个更便利的位置。
矢量工具可以使用这些选项定义运动的矢量。
选择拖动手柄时,此选项可用。
定义矢量时,选定的对象将重定位,以便选定的拖动手柄与矢量对齐。
有关矢量构造器及其选项的信息,请参见Gateway 帮助。
(所有这些图标均在矢量构造器中显示或打开。
)捕捉手柄至WCS将拖动手柄移到WCS 位置。
此选项只影响手柄,而不移动任何对象。
运动记录首选项打开运动的首选项对话框,可在其中设置影响运动步骤和帧的首选项。
拆卸可以不退出运动记录而拆卸当前组件选择对象。
摄像机创建摄像步骤。
在回放过程中如果您想要重新定位序列视图,则使用此选项(例如,要仔细查看非常大的装配中被拆装的小组件)。
使用操控工具(例如缩放)获取所需的方位,然后选择此选项。
回放摄像顺序步骤时,方位更改为您选择摄像时所处的方位。
确定在适当的时候选择此选项,例如已选择了要移动的对象后。
取消取消运动记录。
首选项对话框选项步长大小计算可以使用此对话框上的选项指定步长大小,或者由系统自动定义步长大小。
运动仿真本章主要内容:z运动仿真的工作界面z运动模型管理z连杆特性和运动副z机构载荷z运动分析9.1 运动仿真的工作界面本章主要介绍UG/CAE模块中运动仿真的功能。
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion的功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为:1.建立一个运动分析场景;2.进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;3.进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制;4.运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
9.1.1 打开运动仿真主界面在进行运动仿真之前,先要打开UG/Motion(运动仿真)的主界面。
在UG的主界面中选择菜单命令【Application】→【Motion】,如图9-1所示。
图9-1 打开UG/Motion操作界面选择该菜单命令后,系统将会自动打开UG/Motion的主界面,同时弹出运动仿真的工具栏。
9.1.2 运动仿真工作界面介绍点击Application/Motion后UG界面将作一定的变化,系统将会自动的打开UG/Motion 的主界面。
该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图9-2所示。
图9-2 UG/Motion 主界面运动仿真工具栏部分主要是UG/Motion各项功能的快捷按钮,运动场景导航窗口部分主要是显示当前操作下处于工作状态的各个运动场景的信息。
运动仿真工具栏区又分为四个模块:连杆特性和运动副模块、载荷模块、运动分析模块以及运动模型管理模块,如图9-3所示。
图9-3 四个运动仿真工具栏区运动场景导航窗口显示了文件名称,运动场景的名称、类型、状态、环境参数的设置以及运动模型参数的设置,如图9-4所示。
运动场景是UG运动仿真的框架和入口,它是整个运动模型的载体,储存了运动模型的所有信息。
同一个三维实体模型通过设置不同的运动场景可以建立不同的运动模型,从而实现不同的运动过程,得到不同的运动参数。
图9-4 运动场景导航窗口9.2 运动模型管理打开UG/Motion的主界面之后,将会弹出运动模型管理工具栏,如图9-5所示。
图9-5 运动模型管理工具栏本节将对工具栏中的各个选项进行说明。
9.2.1 场景导航窗口1.运动场景的建立在进行运动仿真之前必需建立一个运动模型,而运动模型的数据都存贮在运动场景之中,所以运动场景的建立是整个运动仿真过程的入口。
利用UG/Modeling的功能建立了一个三维实体模型时必需将该模型设为一个运动可控模型(Master Model),完成几何模型的创建之后,选择【Application】→【Motion】菜单项,弹出运动场景导航窗口,该模型将自动的显示于运动场景导航窗口中,选种该模型按右键将弹出一快捷菜单,如图9-6所示。
图9-6 弹出快捷菜单如果在进入运动仿真界面后,运动场景导航窗口没有相应的打开,用户可以在运动模型工具栏中单击按钮 Scenario Navigator(场景导航),系统将会自动打开运动场景导航窗口。
在模型的右键快捷菜单中选择New Scenario菜单项,将建立一个新的运动场景,默认名称为Scenario_1,类型为Motion,运动仿真环境为静态动力学仿真(Statics & Dynamics),该信息将显示在运动场景导航窗口中,并且运动仿真各运动仿真工具栏项将变为可操作的状态,如图9-7所示。
图9-7 建立一个新场景运动场景建立后便可以对三维实体模型设置各种运动参数了,在该场景中设立的所有的运动参数都将存储在该运动场景之中,由这些运动参数所构建的运动模型也将以该运动场景为载体进行运动仿真。
重复该操作可以在同一个Master Model 下设立各种不同的运动场景,包含不同的运动参数,实现不同的运动。
2.运动场景的编辑运动场景建立后可以对它进行一定的编辑,包括运动场景的重命名(Rename)、删除(Delete)和复制(Clone)。
1)运动场景的重命名选种某一运动场景,单击鼠标右键将弹出一快捷菜单,如图9-8所示。
图9-8 弹出运动场景快捷菜单选择快捷菜单中的Rename 菜单项后,运动场景导航窗口中的场景名称将自动变为可编辑的状态,如图9-9所示。
在该对话框中键入新的运动场景名称应用后既可实现运动场景的重命名。
图9-9 运动场景的重命名2)运动场景的删除选择快捷菜单中的Delete菜单项既可实现运动场景的删除。
3)运动场景的复制选择快捷菜单中的Clone菜单项既可实现运动场景的复制,复制后的运动场景与原来的运动场景的各个参数都相同,如图9-10所示,通过分别选择【scenario_1】→【Clone,scenario_2】→【Clone,scenario_3】→【Clone】菜单项新建了三个与scenario_1各项参数都相同的运动场景,分别默认为scenario_2、scenario_3、scenario_4。
图9-10 运动场景的复制3.运动场景参数的设置和信息的输出1)运动场景环境参数的设置选种某一运动场景,单击鼠标右键将弹出一快捷菜单,选择Environment菜单项将弹出【运动仿真环境类型设置】对话框,如图9-11所示。
图9-11 运动仿真环境类型设置该对话框中的各个选项说明如下:z Kinematics:z Statics Dynamics:通过不同的选择可以将运动仿真环境设置为运动学仿真或者是静态动力学仿真。
2)运动场景信息的输出选种某一运动场景,单击鼠标右键将弹出一快捷菜单,选择【Information】→【Motion Connections】菜单项将弹出显示运动模型各项参数的设置的图文框,它记载了运动模型所有的参数,如图9-12所示。
图9-12 选择【Information】→【Motion Connections】菜单项弹出的运动模型参数设置图文框如图9-13所示。
图9-13 弹出运动模型参数设置图文框9.2.2 编辑模型几何尺寸在建立了一个运动场景之后,用户仍然可以对运动场景中几何体的尺寸进行修改。
在UG/Motion运动模型管理工具栏中选择图标,系统将会自动打开一个【几何模型尺寸编辑】对话框,如图9-14所示。
图9-14 【几何模型尺寸编辑】对话框在该对话框几何模型特征列表中选中某一特征后,其各种特征参数表达式将在特征参数列表中相应的显示,而在特征参数列表中选中该特征的某一参数时,其表达式和值将会相应的在下部显示,此时用户可以对该表达式的值进行编辑。
在特征参数数值文本输入框中输入新的特征参数后,按回车键,同时该对话框中的Apply按钮被激活,单击Apply既可完成该操作,从而改变模型的几何外形。
9.3 连杆特性和运动副利用UG/Modeling的功能建立了一个三维实体模型后,并不能直接将各个部件按一定的连接关系连接起来,必需给各个部件赋予一定的运动学特性,即让其成为一个可以与别的有着相同的特性的部件之间相连接的连杆构件(Link)。
同时,为了组成一个能运动的机构,必需把两个相邻构件(包括机架、原动件、从动件)以一定方式联接起来,这种联接必需是可动连接,而不能是无相对运动的固接(如焊接或铆接),凡是使两个构件接触而又保持某些相对运动的可动连接即称为运动副。
在UG/Motion 中两个部件被赋予了连杆特性后,就可以用运动副(Joint)相联接,组成运动机构。
9.3.1 连杆特性的建立点击运动仿真工具栏区的连杆特性和运动副模块中的图标 (Link),系统将会打开【连杆特性创建】对话框,如图9-15所示。
图9-15 连杆特性的建立该对话框中的各个选项说明如下:1.Selection Steps(选择步骤)该选项给用户提供了建立一个连杆特性的操作步骤。
共包含五个步骤,其中可根据用户的要求省去几项。
各个步骤说明如下:1) Link Geometry该选项用于选择连杆特性的几何模型。
激活该图标后,在图形窗口中选择将要赋予该连杆特性的几何模型。
2) Mass该选项用于设置连杆的质量特性。
选择该图标后,【连杆创建】对话框的界面将会发生变化,变化后对话框的选项说明如图9-16所示。
图9-16 【连杆创建】对话框3) Inertia该选项用于设置连杆的惯性力。
选择该图标后,连杆创建对话框的界面将会发生变化,变化后对话框的选项说明如图9-17所示。
图9-17 【连杆创建】对话框4)Initial Translation V elocity该选项用于设置连杆的初始平移速度。
选择该图标后,连杆创建对话框的界面将会发生变化,变化后对话框的选项说明如图9-18所示。
图9-18 【连杆创建】对话框5) Initial Rotation V elocity该选项用于设置连杆的初始旋转速度。
选择该图标后,连杆创建对话框的界面将会发生变化,变化后对话框的选项说明如图9-19所示。
图9-19 【连杆创建】对话框2.Mass Properties(质量特性)该选项用于设置连杆的质量特性创建的方式,包含三个选项:1)Automatic:由系统自动生成连杆的质量特性。
2)User Define:由用户定义质量特性,选择该选项后,选择步骤中的图标 Mass和Inertia将被自动激活。
3.Name(连杆名称)该选项用于设置连杆的名称。
设置完了这些连杆特性参数后,该部件就具有了一定的运动学特性,可以与别的连杆以一定的连接方式相连接了,构成运动机构。
同时也可以对运动模型进行简化,将连杆的质量特性设置为默认值0,按OK键后该部件也将成为连杆。
9.3.2 连杆特性参数的编辑当连杆特性参数设置有误时,就必需对各项参数进行修改,UG/Motion该项功能的实现是通过运动仿真工具栏区运动模型管理模块中的运动模型部件编辑的功能来实现的。
点击运动模型管理模块中的图标(Edit Motion Object)将弹出一个【类选择】对话框,要求选择将要进行编辑的部件,这与UG/Modeling中的类选择方法类似。