工程力学-位移法计算超静定结构
- 格式:pptx
- 大小:1.00 MB
- 文档页数:32
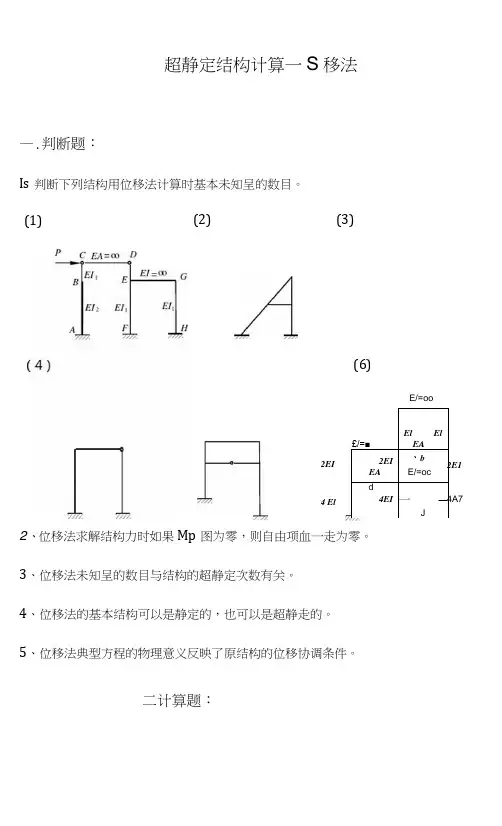
超静定结构计算一S移法—.判断题:Is判断下列结构用位移法计算时基本未知呈的数目。
2、位移法求解结构力时如果Mp图为零,则自由项血一走为零。
3、位移法未知呈的数目与结构的超静定次数有关。
4、位移法的基本结构可以是静定的,也可以是超静走的。
5、位移法典型方程的物理意义反映了原结构的位移协调条件。
二计算题:(2) (3)(1)(6)£/=■El ElEA2EI、bEA E/=ocd4EI一—JE/=oo2E14A72EI4 El12.用位移法计算图示结构并作〃图,横梁刚度EA -8 ,两柱线刚度/相同。
13、用位移法计算图示结构并作〃图。
F/二常数。
14、求对应的荷载集度g。
图示结构横梁刚度无限大。
已知柱顶的水平位移为512/(3 曰)(T)。
15、用位移法计算图示结构州乍M图。
曰=常数。
16、用位移法计算图示结构r求出未知呈,各杆曰相同。
4m4m19、用位移法计算图示结构并作〃图。
-2/ 2fq 二i i20、用位移法计算图示结构并作〃图。
各杆日=営数r q = 20kN/m o6m4 ------- B6m 6mR --- k ----- 123、用位移法计算图示结构州乍M图。
曰=常数。
7T7F24、用位移法计算图示结构州乍M图。
曰=常数。
°^=ZJ週AV 酔辭圍闕¥觀⑨由、充。
回申Z7阴甘县欲 遍如士星與莎竺园蔑44辛觀⑨由、6乙IcnnM M I Z M fc/i in38、用位移法计算图示结构并作〃图。
曰=常数。
42、用位移法计算图示结构州乍〃图。
43、用位移法计算图示结构州乍〃图。
曰=常数。
48、已知0点的位移0,求几51.用位移法计算图示结构并作M 图。
qP M H 1 1 1El---------JIIk —— ------ H超静定结构计算一^移法(参考答案)(617.14、q = 3kN/m1. (11 4 ; (21 4; (31 9; ⑷ 5;(51 7;2、( X )3、( X )< (0)5. (X)12、x qh 2/40 )("/)M图20、24、3236M图(Xql2 n )(X2(//2/33)42912 El----25 I34&。
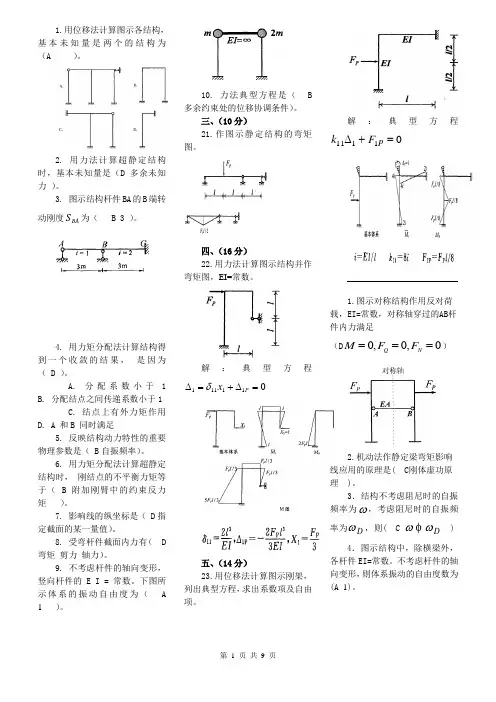
1.用位移法计算图示各结构,基本未知量是两个的结构为(A )。
2. 用力法计算超静定结构时,基本未知量是(D 多余未知力 )。
3. 图示结构杆件BA 的B 端转动刚度BA S 为( B 3 )。
4. 用力矩分配法计算结构得到一个收敛的结果, 是因为( D )。
A. 分配系数小于 1B. 分配结点之间传递系数小于1C. 结点上有外力矩作用D. A 和B 同时满足5. 反映结构动力特性的重要物理参数是( B 自振频率)。
6. 用力矩分配法计算超静定结构时, 刚结点的不平衡力矩等于( B 附加刚臂中的约束反力矩 )。
7. 影响线的纵坐标是( D 指定截面的某一量值)。
8. 受弯杆件截面内力有( D 弯矩 剪力 轴力)。
9. 不考虑杆件的轴向变形,竖向杆件的 E I = 常数。
下图所示体系的振动自由度为( A1 )。
10. 力法典型方程是( B 多余约束处的位移协调条件)。
三、(10分)21.作图示静定结构的弯矩图。
四、(16分)22.用力法计算图示结构并作弯矩图,EI=常数。
解:典型方程011111=∆+=∆P x δ五、(14分)23.用位移法计算图示刚架,列出典型方程,求出系数项及自由项。
解:典型方程01111=+∆P F k1.图示对称结构作用反对荷载,EI=常数,对称轴穿过的AB 杆件内力满足(D 0,0,0===N Q F F M)2.机动法作静定梁弯矩影响线应用的原理是( C 刚体虚功原理 )。
3.结构不考虑阻尼时的自振频率为ω,考虑阻尼时的自振频率为D ω,则( C D ωω ) 4.图示结构中,除横梁外,各杆件EI=常数。
不考虑杆件的轴向变形,则体系振动的自由度数为(A 1)。
5.位移法典型方程是根据( D 附加约束的平衡条件 )列出的。
6.图示a 、b 两体系的自振频率aω与bω的关系为( Bb a ωω )。
7.图示对称结构作用反对称荷载,杆件EI 为常量,利用对称性简化后的一半结构为( A )。
土木工程力学作业04任务一、单项选择题(共10 道试题,共30 分。
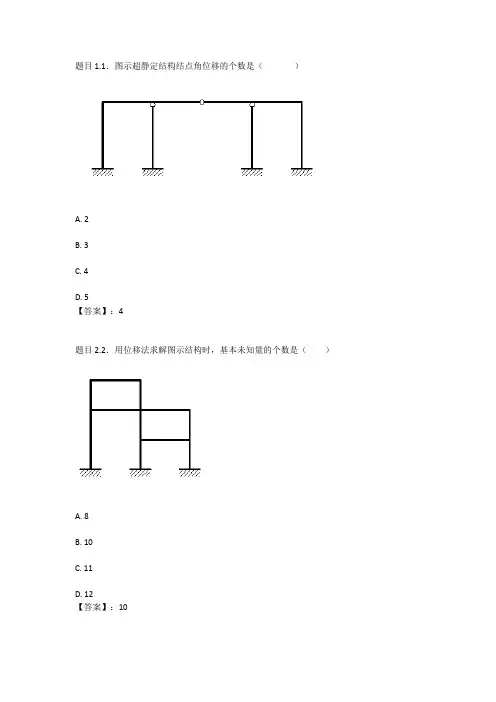
)1. 位移法典型方程实质上是(A )A. 平衡方程B. 位移条件C. 物理关系D. 位移互等定理2 用位移法计算超静定结构时,独立的结点角位移数等于( B )A. 铰结点数B. 刚结点数C. 多余约束数D. 不确定3. 用位移法解超静定结构其基本未知量的数目( A )A. 与结构的形式有关B. 与多余约束的数目有关C. 与结点数有关D. 与杆件数有关4. 用位移法计算超静定结构时,其基本未知量为(D )A. 多余未知力B. 杆端内力C. 杆端弯矩D. 结点位移5. 在位移法计算中规定正的杆端弯矩是(A)A. 绕杆端顺时针转动B. 绕结点顺时针转动C. 绕杆端逆时针转动D. 使梁的下侧受拉6位移法典型方程中的系数代表在基本体系上产生的(C)A. B. C. 第i个附加约束中的约束反力 D. 第j个附加约束中的约束反力7 位移法基本方程中的自由项,代表荷载在基本体系作用下产生的(C)A. B. C. 第i个附加约束中的约束反力 D. 第j个附加约束中的约束反力8 图示超静定结构结点角位移的个数是( C )A. 2B. 3C. 4D. 59. 图示超静定结构结点角位移的个数是( B )A. 2B. 3C. 4D. 510. 图示超静定结构,结点线位移(独立)的个数是(B )A. 0B. 1C. 2D. 311. 图示超静定结构独立结点角位移的个数是(B)A. 2B. 3C. 4D. 512. 用位移法求解图示结构时,基本未知量的个数是(B)A. 8B. 10C. 11D. 1213. 用位移法求解图示结构时,基本未知量个数是(B)A. 1B. 2C. 3D. 414. 图示结构位移法方程中的系数=(D )A. 11B. 5C. 9D. 815 图示结构位移法方程中的系数=(C)A. 3B. 8C. 15D. 1316. 图示结构位移法方程中的自由项=( B )A. 2B. -2C. 12D. -26217. 图示刚架在节点集中力偶作用下,弯矩图分布是(D)A 各杆都不产生弯矩B各杆都产生弯矩C 仅AB杆产生弯矩D仅AB、BE杆产生弯矩18 图示单跨超静定梁的固端弯矩=( A )A. B. C. D.19 下图所示三根梁的EI、杆长相同,它们的固定端的弯矩之间的关系是( C )A. 三者的固定端弯矩不同B. (1)、(2)的固定端弯矩相同C. (2)、(3)的固定端弯矩相同D. 三者的固定端弯矩相同20. 下图所示连续梁,欲使A端发生单位转动,需在A端施加的力矩(D)A. B. C. D.21. 图示结构杆件BC的B端转动刚度为( D )。
位移法求解超静定结构一、引言超静定结构是指在静力学条件下,其内力和位移无法通过平衡方程和变形方程求解的结构。
由于超静定结构的内力和位移无法直接求解,因此需要采用特殊的方法进行计算。
其中,位移法是一种经典的求解超静定结构的方法。
二、位移法基本原理位移法是一种基于能量原理的方法,其基本思想是将结构中各个部分的变形看作独立自由度,然后通过能量平衡原理得到各个自由度之间的关系,最终求解出整个结构的内力和位移。
具体来说,位移法包括以下几个步骤:1. 将超静定结构中每一个部分看作一个独立自由度,并为每个自由度引入一个未知位移;2. 根据平衡条件列出各部分之间相互制约的方程组;3. 根据能量平衡原理列出总势能和总应变能之间的关系式,并将其转化为未知位移之间的关系式;4. 将各个方程组联立起来,得到未知位移之间的关系式;5. 利用已知边界条件解出未知位移,并进而求解出整个结构的内力和位移。
三、位移法的应用范围位移法适用于各种类型的超静定结构,包括梁、柱、框架等。
此外,位移法还可以用于求解复杂的结构体系,如悬索桥、拱桥等。
四、位移法的优点和缺点1. 优点:(1)能够求解各种类型的超静定结构;(2)计算精度高,适用于复杂结构;(3)计算过程简单明了,易于理解和掌握。
2. 缺点:(1)只能求解超静定结构,不能求解不静定和半静定结构;(2)需要将每个部分看作独立自由度,因此对于复杂结构需要引入大量自由度,计算量较大;(3)需要具备一定的数学基础和结构力学知识。
五、位移法的实例以一根简支梁为例进行说明。
假设梁长为L,截面为矩形截面,宽度为b,高度为h。
在中间加一集中荷载F,则该梁为超静定结构。
采用位移法进行求解:1. 将梁分成两段,并引入两个未知位移u1和u2;2. 根据平衡条件,得到以下方程组:(1)在x=0处:F = R1 + R2(2)在x=L处:R1u1 + R2u2 = FL/43. 根据能量平衡原理,得到以下关系式:(1)总势能:V = (R1u1 + R2u2)hL/2(2)总应变能:T = F^2L^3/48EI4. 将以上方程组和关系式联立起来,得到:(1)F = (3EI/h^3L^3)(u1 - u2)(2)R1 = F/2 - EI/h^3L^3(u1 + u2)(3)R2 = F/2 + EI/h^3L^3(u1 + u2)5. 利用已知边界条件,即梁两端的位移为0,解出未知位移:(1)u1 = FL^3/(48EIh);(2)u2 = -FL^3/(48EIh);6. 最终求解出内力和位移:(1)R1 = F/4;(2)R2 = F/4;(3)Mmax = FL/8;(4)umax = FL^3/(48EIh)。
题目:1.用位移法解超静定结构时,附加刚臂上的反力矩是利用结点平衡求得的。
()选项A:对
选项B:错
答案:对
题目:2.位移法的基本结构不是唯一的。
()
选项A:对
选项B:错
答案:错
题目:3.位移法的基本结构是超静定结构。
()
选项A:对
选项B:错
答案:对
题目:4.图a为一对称结构作用对称荷载,利用对称性简化的半边结构如图b所示。
()(b)
选项A:对
选项B:错
答案:错
题目:5.位移法典型方程中的自由项是外因作用下附加约束上的反力。
()
选项A:对
选项B:错
答案:对
题目:图示结构用位移法计算的基本未知量是3。
)
)。
选项A:)
选项A:附加约束上的位移条件
选项B:外力与内力的关系
选项C:反力互等定理
选项D:附加约束上的平衡方程
答案:附加约束上的平衡方程
题目:5.力法典型方程是根据以下哪个条件得到的()。
选项A:多余约束处的位移协调条件
选项B:结构的平衡条件
选项C:结构的物理条件
选项D:同时满足A、B两个条件
答案:多余约束处的位移协调条件
题目:6.用位移法求解图示结构时,基本未知量的个数是()。
)
)
)
)
选项A:)
选项A:多余约束数
选项B:铰结点数
选项C:不确定
选项D:刚结点数。
位移法定义:以结点位移(角位移和线位移)为未知量以求解静不定结构反力和内力的基本方法。
所属学科:水利科技(一级学科);工程力学、工程结构、建筑材料(二级学科);工程力学(水利)(三级学科)简介位移法 displacement method位移法是计算超静定结构的另一种基本的、也是有效的方法,不仅如此,对于静定结构,位移法也是一种计算方法。
力法从未知力/缀余力入手,力法的基本原理,是对于超静定结构中任意两点的相对变形都是0,也就说所有的力在该位置上产生的变形之和为0,因此力法可以称之为位移协调法。
位移法与之相对应,即对于处于平衡状态下的结构体系来讲,结构中的任意一点获任意组成部分也是处于平衡状态的,因此该点或部分必然存在内力的平衡,以内力平衡为基础所构建的线性方程组来求解结构内力,也是一种极佳的方法。
因为结构的内力与变形之间存在着必然的、确定的联系,因此结构的内力平衡一般从位移为未知量来入手,最终求得结构内力。
这种以位移为初始未知数求解结构内力的方法称为位移法。
位移法的基本计算假定位移法的计算要以以下基本假定为前提:忽略轴力产生的轴向变形的影响,杆件变形前的直线长度与变形后的曲线长度相等。
弯曲变形是微小,并忽略剪切变形的影响,杆件变形后的曲线长度与弦线长度相等。
因此可以得到:推论1:尽管杆件产生弯曲变形,但直杆件两端点之间的沿杆的轴线方向的距离变形前后仍保持不变。
推论2:直杆的一端不变动而杆发生弯曲变形时,杆的另一端的线位移与杆原轴线相垂直。
(与杆原轴线夹角)便是该点横截面的转角。
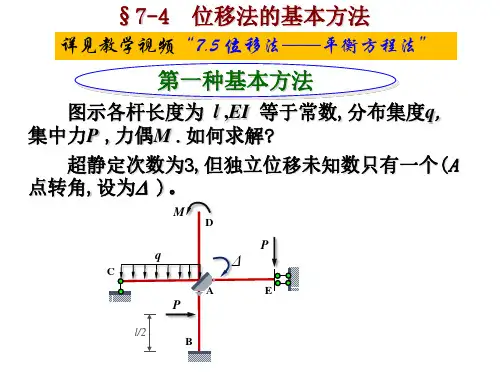
推论3:杆件轴挠曲线上某点之切线的倾角位移法计算法种类典型方程法位移法可按两种思路求解结点位移和杆端弯矩:典型方程法和平衡方程法。
下面给出典型方程法的解题思路和解题步骤。
1、位移法典型方程的建立:欲用位移法求解图a所示结构,先选图b为基本体系。
然后,使基本体系发生与原结构相同的结点位移,受相同的荷载,又因原结构中无附加约束,故基本体系的附加约束中的约束反力(矩)必须为零,即:R1=0,R2=0。
力法、位移法求解超静定结构讲解超静定结构是指在静力学计算中具有过多约束的结构体系,其问题在于不能通过传统的静力学方法直接计算出结构体系的内力以及位移的分布情况,需要利用力法或者位移法来求解超静定结构。
力法是指将结构体系的内力分配给各个构件,然后根据各个构件的受力情况和变形情况,逐步推导出结构体系的内力和位移分布情况的一种方法。
其基本思想是通过外部荷载作用下的内力分配,将超静定结构分解成多个静定结构分析,同时通过协调各个分析时的界面条件,进行内力和位移的匹配,最终得到了超静定结构的内力和位移分布情况。
具体实现步骤如下:1. 选定一个自由图,并对该自由图进行划分,将超静定结构分成多个静定结构,其中每个静定结构的节点数均满足有一个自由度。
分割完毕后,确定每个静定结构的支座反力,然后由每个静定结构自己采用传统的静力学原理分析,并得到各自的内力和位移。
2. 对于静定结构之间的相互配合,需要根据结构体系的受力变形情况建立相互之间的协调关系。
最常用的协调方法是确定静定结构之间的界面条件,如节点位移和节点荷载的相等,以及弹簧刚度之和等于零。
3. 在确定了静定结构之间的界面条件后,就可以获得超静定结构的结构内力分布,接下来需要计算出结构的位移分布。
这一步可以通过位移影响系数法进行求解,具体来说,先在静定结构中确定一个位移分量,然后根据约束条件求得其余节点的位移分量,最终获得超静定结构的位移分布。
相比于力法,位移法的思路更加简洁明了,具体步骤如下:1. 建立超静定结构的初始刚度方程,包括构件中的整体刚度和节点位移自由度的边界条件等。
2. 将超静定结构受到的外载按照一定的规律进行分配,使得该结构从受力变形的点出发经过一系列刚度修正后,其总体刚度等于原结构的刚度。
这个修正过程是迭代的,一般采用迭代矩阵求逆的方式进行求解。
3. 当总体刚度修正后,结构的总位移就变为了一个已知量。
根据节点位移自由度的边界条件,可以直接解出各节点的位移分量。
《工程力学》作业3部分参考答案A 平衡方程B 位移条件C 物理关系D 位移互等定理 5.位移法典型方程中的系数ij k 代表1=∆j 在基本体系上产生的( C )A i ∆B j ∆C 第i 个附加约束中的约束反力D 第j 个附加约束中的约束反力 6.图6所示结构的位移法基本未知量数目为( D )A 2B 3C 4D 6C绕杆端逆时针转动D使梁的下侧受拉12.力矩分配法的直接对象是(A)A杆端弯矩B结点位移C多余未知力D未知反力13.汇交于一刚结点的各杆端弯矩分配系数之和等于(A)A 1 B0 C1/2 D-114.一般情况下结点的不平衡力矩总等于(A)A汇交于该结点的固定端弯矩之和B传递弯矩之和C结点集中力偶荷载D附加约束中的约束力矩15.下图所示连续梁结点B的不平衡力矩为(A)A-10kN·m B46 kN·mC18 kN·m D-28 kN·m三、填空题(每空2分,共20分)1.位移法基本体系是一组单跨超静定梁。
2.单跨超静定梁的形常数是指由杆端位移引起的杆端力。
条件;该方法可解超静定结构与静定结构。
利用叠加法F B M M M +⋅=θ1作最后M 图。
L602ql11p 1 设EI =1,则BA i =4i =4,AB i =2i =2 BD i =4i =4,DB i =2i =2BC i 作1M 图及p M 图11k =4BA i +4BD i +3BC =4+4+6=14……②F BAM =1212qL P F 1=1212qL …………………………③由①、②、③得1∆=1682qL5、作M 图AB M =2·1682qL -1212qL =-142qL1M 图p M 图M 图33.17 4.74kN⋅)9.47 M图(m。