单片机驱动LED数码管原理
- 格式:pdf
- 大小:1.36 MB
- 文档页数:10
主题:51单片机数码管显示数字原理内容:1. 介绍51单片机在现代的电子产品中,单片机被广泛应用于各个领域,它是一种集成了微处理器、存储器和输入/输出端口的集成电路芯片。
其中,51单片机即指的是基于Intel 8051架构的单片机,它具有低功耗、高性能和丰富的外设接口,因此被广泛应用于嵌入式系统设计中。
2. 数码管的基本原理数码管是一种能够显示数字和部分字母的显示器件,它由多个发光二极管组成,可以显示0-9的数字。
数码管按照结构可以分为共阳数码管和共阳数码管两种类型。
共阳数码管的显示原理是通过控制各个发光二极管的通断状态来显示不同的数字,而共阴数码管则是通过控制对应的极性来实现数字的显示。
3. 51单片机连接数码管的原理通过51单片机控制数码管显示数字,需要用到引脚的输出功能。
在连接共阳数码管时,需要通过51单片机的输出引脚控制各个发光二极管的状态;而在连接共阴数码管时,则是通过控制对应的极性来实现数字的显示。
4. 51单片机连接数码管的实现步骤由于51单片机有多个通用IO口,因此可以连接多个数码管。
连接数码管的步骤如下:1)确定数码管的类型,共阴还是共阳2)连接数码管的正极和负极到单片机的对应IO口3)编写程序控制51单片机的IO口输出状态,以显示所需的数字5. 51单片机连接数码管的程序设计下面是一个简单的示例程序,演示了如何使用51单片机连接数码管,并控制其显示数字的过程:```C#include <reg51.h>sbit DIG1 = P0^0; // 数码管第一位sbit DIG2 = P0^1; // 数码管第二位sbit DIG3 = P0^2; // 数码管第三位sbit DIG4 = P0^3; // 数码管第四位void m本人n(){unsigned char DisplayData[] ={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; // 0-9的显示码unsigned char i;while(1){for(i=0; i<10; i++){DIG1=0; // 打开第一位数码管P2=DisplayData[i]; // 发送段码delay(100); // 延时DIG1=1; // 关闭第一位数码管// 同样的方法依次打开其他位数码管并发送段码// 这里省略其他三个数码管的控制}}}通过以上程序设计,我们可以实现用51单片机控制数码管显示0-9的数字。
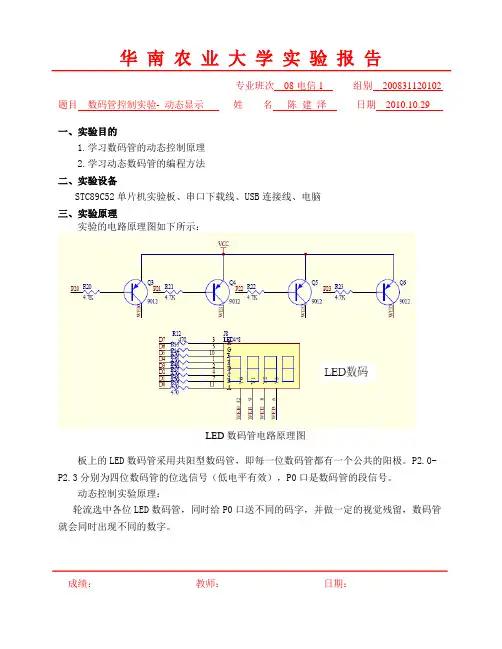
单⽚机实验报告——LED数码管显⽰实验(此⽂档为word格式,下载后您可任意编辑修改!)《微机实验》报告LED数码管显⽰实验指导教师:专业班级:姓名:学号:联系⽅式:⼀、任务要求实验⽬的:理解LED七段数码管的显⽰控制原理,掌握数码管与MCU的接⼝技术,能够编写数码管显⽰驱动程序;熟悉接⼝程序调试⽅法。
实验内容:利⽤C8051F310单⽚机控制数码管显⽰器基本要求:利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
提⾼要求:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:yyyy (年份)mm.dd(⽉份.⽇).asm;Description: 利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
;Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000H ;复位⼊⼝AJMP MAINORG 000BH ;定时器0中断⼊⼝AJMP TIME0MAIN: ACALL Init_Device ;初始化配置MOV P0,#00H ;位选中第⼀个数码管MOV R0,#00H ;偏移指针初值CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#06HMOV TL0,#0C6H ;赋初值,定时1sLOOP: MOV A,R0ADD A,#0BH ;加偏移量MOVC +PC ;查表取,段码MOV P1,A ;段码给P1显⽰SETB TR0 ;开定时LOOP1: JNB PSW.1,LOOP1 ;等待中断CLR PSW.1INC R0 ;偏移指针加⼀CJNE R0,#0AH,LOOP3MOV R0,#00H ;偏移指针满10清零AJMP LOOP ;返回DB 0FCH,60H,0DAH,0F2H,66H ;段码数据表:0、1、2、3、4 DB 0B6H,0BEH,0E0H,0FEH,0F6H; 5、6、7、8、9 ;***************************************************************** ; 定时器0中断;***************************************************************** TIME0: SETB PSW.1 ;标志位置⼀MOV TH0,#06H ;定时器重新赋值MOV TL0,#0C6HLOOP3: CLR TR0 ;关定时RETI;***************************************************************** ;初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital ; P0.1 - Unassigned, Open-Drain, Digital ; P0.2 - Unassigned, Open-Drain, Digital ; P0.3 - Unassigned, Open-Drain, Digital ; P0.4 -Unassigned, Open-Drain, Digital ; P0.5 - Unassigned, Open-Drain, Digital ; P0.6 - Unassigned, Open-Drain, Digital ; P0.7 - Unassigned, Open-Drain, Digital ; P1.0 - Unassigned, Open-Drain, Digital ; P1.1 - Unassigned, Open-Drain, Digital ; P1.2 - Unassigned, Open-Drain, Digital ; P1.3 - Unassigned, Open-Drain, Digital ; P1.4 - Unassigned, Open-Drain, Digital ; P1.5 - Unassigned, Open-Drain, Digital ; P1.6 - Unassigned, Open-Drain, Digital ; P1.7 - Unassigned, Open-Drain, Digital ; P2.0 - Unassigned, Open-Drain, Digital ; P2.1 -Unassigned, Open-Drain, Digital ; P2.2 - Unassigned, Open-Drain, Digital ; P2.3 - Unassigned, Open-Drain, Digital mov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend提⾼部分:;*********************************************************;Filename: shumaguan2.asm;Description:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:; 2012 (年份); 12.07(⽉份.⽇); 12.34(⼩时.分钟);Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000HAJMP MAINORG 000BHAJMP TIME0MAIN: ACALL Init_DeviceMOV R0,#00H ;⽤于位选MOV R1,#00H ;⽤于段选MOV R2,#22H ;置偏移量,⽤于控制模式MOV R4,#8MOV R5,#250CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#0FFHMOV TL0,#0C0H ;定时器赋初值1msBACK: MOV P0,R0 ;位选MOV A,R0ADD A,#40H ;选下⼀位MOV R0,AMOV A,R1ADD A,R2 ;加偏移量MOVC +PC ;查表取段码MOV P1,A ;段码给P1显⽰LOOP: SETB TR0 ;开定时HERE: JNB PSW.1,HERE ;等待中断CLR PSW.1DJNZ R5,BACKMOV R5,#250DJNZ R4,BACKMOV R4,#8 ;循环2000次(2s)MOV A,R2ADD A,#04H ;偏移量加04H,到下⼀模式段码初值地址 MOV R2,ACJNE R2,#2EH,LOOP2MOV R2,#22H ;加三次后偏移量回到初值LOOP2: AJMP BACK ;返回进⼊下⼀模式;段码数据表:DB 0DAH,60H,0FCH,0DAH ; 2102DB 0E0H,0FCH,61H,60H ; 701. 1DB 66H,0F2H,0DBH,60H ; 432. 1;*****************************************************************; 定时器0中断;***************************************************************** TIME0: MOV TH0,#0FFH MOV TL0,#0C0HCLR TR0SETB PSW.1INC R1 ;偏移指针加⼀CJNE R1,#04H,LOOPMOV R1,#00H ;偏移指针满04H清零RETI;***************************************************************** ; 初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital; P0.1 - Unassigned, Open-Drain, Digital; P0.2 - Unassigned, Open-Drain, Digital; P0.3 - Unassigned, Open-Drain, Digital; P0.4 - Unassigned, Open-Drain, Digital; P0.5 - Unassigned, Open-Drain, Digital; P0.6 - Unassigned, Open-Drain, Digital; P0.7 - Unassigned, Open-Drain, Digital; P1.0 - Unassigned, Open-Drain, Digital; P1.1 - Unassigned, Open-Drain, Digital; P1.2 - Unassigned, Open-Drain, Digital; P1.3 - Unassigned, Open-Drain, Digital; P1.4 - Unassigned, Open-Drain, Digital; P1.5 - Unassigned, Open-Drain, Digital; P1.6 - Unassigned, Open-Drain, Digital; P1.7 - Unassigned, Open-Drain, Digital; P2.0 - Unassigned, Open-Drain, Digital; P2.1 - Unassigned, Open-Drain, Digital; P2.2 - Unassigned, Open-Drain, Digital; P2.3 - Unassigned, Open-Drain, Digitalmov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend六、程序测试⽅法与结果、软件性能分析软件调试总体截图:基础部分:软件运⾏时,我们发现P0端⼝为00H,P1端⼝以依次为FCH、60H、DAH、F2H、66H、B6H、BEH、E0H、FEH、F6H。
51单⽚机第四节数码管本笔记默认学习者已拥有:1.Keil5和stc 烧写⼯具 等各种软件、驱动、环境;2.有⼀个属于⾃⼰的 51单⽚机开发板及相关零件 ;3.认识C 语⾔的语法;本⼈使⽤的51开发板为 郭天祥C51 TX-1C 增强版开发板 ;本笔记根据B 站up 主:江科⼤⾃化协的教学视频 整理得到ヾ(•ω•)4-1 静态数码管显⽰上图为TX-1C 的 数码管及LED 模块 原理图138译码器和74HC245 都是⽤来控制 数码管显⽰ 的;单数码管1.上图为 ⼀位数码管,数码管有两种连接⽅式(对应 右边上下两幅图);2.右上图的原理图,8个LED的阴极都连在⼀个引脚上,称为共阴极连接;3.右下图的原理图,8个LED的阳极都连在⼀个引脚上,称为共阳极连接;TX-1C 开发板的连接⽅式是 共阴极连接;4.左下⾓的 左边图⽚ ,定义了8个LED的名称;5.左下⾓的 右边图⽚ ,定义了引脚的名称,与右图的引脚名称⼀⼀对应假设数码管连接⽅式为 共阳极连接,观察可以发现,数码管中的 LED 的引脚引出,使⽤的是就近原则;假设数码管连接⽅式为 共阴极连接,如果上数码管显⽰ 数字6 ?1.要让数码管显⽰ 数字6,让要 LED-A、C、D、E、F、G亮起;2.共阴极的公共端 要接地(给数据‘0’,或者是低电平);3.阳极(称为位选端)根据LED的亮灭需求给 数据0或1(1亮、0灭) ,称为 段码(阳码) (1011 1110 即为段码);如果 共阳极连接,共阳极端 要接到 VCC (⾼电平),阴极给 数据0或1 (1灭,0亮),称为 段码(阴码),和共阴极正好是相反关系;共阳极连接→共阳极端接VCC 并选中→阴极(位选端)传递(阴码)段码(1亮、0灭)→数码管显⽰共阴极连接→共阴极端接GND 并选中→阳极(位选端)传递(阳码)段码(1灭、0亮)→数码管显⽰四位⼀体数码管开发板上即为 四位⼀体的数码管,且有两个,正好组成了 ⼋位数码管;⽽TX-1C 上 包含的是六位数码管,⽽⾮⼋位;1.四位数码管 也有 两种连接⽅式,即 共阴极连接 和 共阳极连接 ;{Processing math: 100%2.四位数码管,(每位的公共端 单独引出来,位选端全部连在⼀起(所有A段连在⼀起、所有B段连在⼀起……),总共有12个引脚;假设数码管连接⽅式为共阴极连接,如何在第三位显⽰数字1 ?1.给第三位的公共端 赋值 0(低电平),给其他位的公共端 赋值 1(⾼电平);这样等同于 其他位的公共端(负极)接到了正极上,⽆论如何都亮不了;只有第三位能亮;2.这样给 LED-B、C 的位选端 赋值 1,其他 位选端 赋值0共阳极连接即为公共端赋值 1(⾼电平)亮,其他以此类推;3.发现这样⼀个现象,数码管⽆法在同⼀时间显⽰多个数字,其在同⼀时刻下只能有⼀个显⽰,只有⼀个数码管能被点亮,即使有多个被选中的数码管,显⽰的数字也是相同的;这种共⽤引脚的现象,是为了减少控制数码管IO⼝;(四位数码管有32个LED,如果都采⽤共阴极连接的⽅式,也要32+1(公共端)=33个引脚;)(采⽤这种链接,就只需要12个引脚即可控制四位数码管;)如何让数码管多位显⽰不同数字(动态数码管显⽰)?1.利⽤ ⼈眼视觉的暂留 和 数码管显⽰的余辉 的原理先让第⼀位数码管显⽰1,然后很快地让第⼆位数码管显⽰2,再很快地让第三位数码管显⽰3,让它不断地扫描,重复显⽰1、2、3的过程,这样三个数字就“同时”显⽰了;原理分析138译码器1.观察到 原理图右图 与数码管有关的,有138译码器(74LS138)和74HC245两枚芯⽚;TX-1C的原理图为左图,也有两个74HC573芯⽚与数码管有关;芯⽚名称与功耗、电压、说明符号有关,具体内容不做分析;2.如图,数码管连接⽅式为 共阴极连接,这样传输数据,就能让第三位显⽰ 数字1 了;3.⽽上⾯的 LED1 ~ 8,其实接在了138译码器的输出端,138译码器正好可以实现让LED1 ~ 8输出 0或1;LED1 ~ 8 对应了 TX-1C 六位数码管的SEG DS 1 ~ 6;4.138译码器可将LED 1 ~ 8的⼋个端⼝ 转化为 由 3个端⼝ (P22、P23、P24)控制,⽽G1、G2A、G2B端⼝ 被 称为 使能端;使能端相当于⼀种开关,如果电平有效,它就可以⼯作;如果电平⽆效,它就不⼯作;观察原理图发现,使能端是已经接好 VCC 和 GND 的,也就是说,其上电其实就会⼯作TX-1C的74HC573也是同理,但其并未压缩控制端⼝的数量;5.138译码器也叫“38线译码器”,是由3个线到8个线,其中C是⾼位、A是低位,CBA组成的数符合8进制,控制着Y0 ~ Y7 这8个端⼝;6.所以,138译码器的作⽤就是⽤来选中某⼀位数码管的74HC2451.74HC245是⼀种 双向数据缓冲器,VDD、GND都可视为电源,OE为使能(其 接地 就⼯作);2.DIR(direction),是⽅向的意思,它接到了VCC(⾼电平)上,将数据从左边输出到右边,从右边将数据读取回左边;DIR若接到低电平上,会将数据从右边输出到左边,从左边将数据读取回右边;3.单⽚机的⾼电平 驱动能⼒有限,其输出的最⼤电流不能太⼤;其低电平 驱动能⼒强;因此,LED模块才采⽤了低电平点亮的模式;4.如果⽤⾼电平 直接点亮 数码管,电流会很⼩,灯会很暗;所以其加⼀个缓冲器,缓冲器可以提⾼ 其驱动能⼒,如果直接将 数据 输出 给 数码管,数据就会被视为 驱动数据;现在增加了缓冲器,数据 就变成了 控制信号,控制信号 只需要很微弱,缓冲器 就可以接收到,缓冲器再通过⾃⼰接到的电源,输出 数据 到引脚上,这样控制的电流只需要⾮常⼩,就能驱动数码管 以⽐较亮的形式显⽰;2电容 是⽤来 稳定电源的,叫电源滤波;6.图右有 ⼀ 排阻,阻值为100R(即为100Ω),作⽤为 限流电阻 ,防⽌数码管的电流过⼤;TX-1C既没有电容,也没有排阻;原理总结1.⽤ 138译码器 使 数码管 的某⼀位 被选中;2.再给P0⼝⼀个 段码数据;TX-1C虽然⽤P0⼝控制段码输⼊,但也⽤P0⼝控制位选;需要先⽤ P2.6⼝和P2.7⼝控制输⼊数据是段码还是位选;P2.6⼝控制段码的输⼊;P2.7⼝控制位选的输⼊;例,给P2.6 数据1 (⾼电压)、给P2.7 数据 0 (低电压),就可以确定现在给数据是段码;1.由TX-1C的原理图可知,数码管内 LED灯 与 P0端⼝ 的顺序关系:(1)LED的名称定义是通⽤⽆疑的;(2)数码管本⾝的引脚名称不重要,重要的是 LED与哪个 P0 的 引脚 相连;2.由TX-1C的原理图可知, P0.0引脚 控制 数码管的最左位,P0.5引脚控制 数码管的最右位,剩余引脚是没有控制 数码管 位选 的作⽤的,哪个P0 的 引脚 控制 六位数码管的 哪位 很重要;代码实现静态数码管显⽰(让数码管第三位显⽰3).c#include<reg51.h>sbit D=P2^6; //段码⼝sbit W=P2^7; //位选⼝void main(){D=0;W=1;P0=0xFB;//1111 1011W=0;D=1;P0=0x4F;//0100 1111while(1);}下⾯写出了⼀个通⽤函数,可以让数码管在 第⼏个位置 显⽰ 哪个数#include<reg51.h>#define uchar unsigned charsbit D=P2^6;sbit W=P2^7;void NixieTube(uchar wei,uchar duan){ //NixieTube是数码管的英⽂uchar WEI,DUAN; //(Nixie是⼥⽔妖的意思)D=0;W=1;switch(wei){ //位选部分case 1:WEI=0xFE; break;case 2:WEI=0xFD; break;case 3:WEI=0xFB; break;case 4:WEI=0xF7; break;case 5:WEI=0xEF; break;case 6:WEI=0xDF; break;}P0=WEI;W=0;D=1;switch(duan){ //段码部分case 0:DUAN=0x3F; break;case 1:DUAN=0x06; break;case 2:DUAN=0x5B; break;case 3:DUAN=0x4F; break;case 4:DUAN=0x66; break;case 5:DUAN=0x6D; break;case 6:DUAN=0x7D; break;case 7:DUAN=0x07; break;case 8:DUAN=0x7F; break;case 9:DUAN=0x6F; break;case 10:DUAN=0x77; break; //Acase 11:DUAN=0x7F; break; //Bcase 12:DUAN=0x39; break; //Ccase 13:DUAN=0x3F; break; //Dcase 14:DUAN=0x79; break; //Ecase 15:DUAN=0x71; break; //Fcase 16:DUAN=0x80; break; //.}P0=DUAN;}void main(){NixieTube(3,3);while(1);}运⾏结果如下:4-2 动态数码管显⽰1.如果只是单纯让其显⽰完⼀个再显⽰⼀个,代码如下:#include<reg51.h>#define uchar unsigned charsbit D=P2^6;sbit W=P2^7;uchar Nixiewei[]={0,0xFE,0xFD,0xFB,0xF7,0xEF,0xDF};uchar Nixiecode[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7F,0x39,0x3F,0x79,0x71,0x80};//将两个switch改进为数组void NixieTube(uchar wei,uchar duan){D=0;W=1;P0=Nixiewei[wei];W=0;D=1;P0=Nixiecode[duan];}void main(){while(1){NixieTube(1,1);NixieTube(2,2);NixieTube(3,3);}}运⾏结果如下:2.这是⼀个数码管的常见问题,称为 数码管的消影 ;位选-->段选-->位选-->段选-->位选-->......在这⼀位的段选(输⼊段码)结束,进⾏下⼀位的位选时,很短的时间内,上⼀位的数据会串到下⼀位数据⾥⾯去;所以我们在段选和位选之间,增加⼀个 P0 清零的操作;动态数码管显⽰(数码管同时显⽰123).c#include<reg51.h>#define uchar unsigned charsbit D=P2^6;sbit W=P2^7;uchar Nixiewei[]={0,0xFE,0xFD,0xFB,0xF7,0xEF,0xDF};uchar Nixiecode[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7F,0x39,0x3F,0x79,0x71,0x80};void Delayms(unsigned int x){unsigned int j;for(;x>0;x--) for(j=110;j>0;j--);}void NixieTube(uchar wei,uchar duan){D=0;W=1;P0=Nixiewei[wei];W=0;D=1;P0=Nixiecode[duan];Delayms(1); //让数码管稳定显⽰,⽴刻清零会让数码管显⽰较暗P0=0; //清零操作}void main(){while(1){NixieTube(1,1);NixieTube(2,2);NixieTube(3,3);}}运⾏结果如下:相关知识1.在运⾏某些代码时,TX-1C的LED点阵模块会乱闪2.将左下⾓ DOT-OE旁的跳线帽 拔下来即可 断开LED点阵模块,3.拔下来的跳线帽不要乱丢,可以 只插⼀个脚放在原处,也可以妥善保管在其他地⽅上图即为拔下来的跳线帽1.此元件为电容;2.104的数量规则与 第⼆节 所讲的电容是相同的,其单位是pF1000pF=1nF, 1000nF=1uF, 1000uF=1000mF, 1000mF=1FF 是⼀个很⼤的单位,正常电容都是uF、nF级别的;超级电容能达到1 ~ 2 F,其⼀般作为备⽤电池;3.TX-1C的原理图上,电容的量都是直接⽤单位标记好的。
单片机串口连接两个74L S164驱动两个L E D数码管单片机应用设计课题:串口连接两个74LS164驱动2个LED数码管显示班级学号: 14110501xx 姓名: xx1设计要求1.1 设计内容设晶体为12MHz,将拨码开关数据串行输入到74LS164,并行输出到2个LED数码管进行相应的数码显示。
设计包括:系统设计分析、系统原理图设计、程序流程图设计、源程序设计、系统调试与仿真及调试结果分析、对本课程学习的感想与收获、对老师的意见与建议、期望成绩等。
1.2 学习目的该作业具有较强的实用性,许多同学已经认识到自己完全有能力设计一个实用的单片机应用系统,对单片机设计由感兴趣已经变为爱好了,为后面的实际应用系统设计奠定了较好的基础。
2 系统设计分析2.1 单片机最小系统+串口+74LS164+LED数码管单片机的最小系统是单片机能够工作的最小硬件组合,对于8051系列单片机,其电路的最小系统大致相同,主要包括电源、晶体振荡电路、复位电路等。
2.1.1 串口数据通信方式包括并行通信和串行通信两种。
并行通信就是多条数据线上同时传送,其优点:速度快,只适于近距离通信。
串行通信就是数据以为以为的顺序传送,其优点:线路简单,成本低,适合远距离通信。
串行通信方式包括:异步串行通信和同步串行通信。
异步方式,数据传送不连续,时间间隔任意。
同步方式,发送与接收同步。
数据传送方式:单工、半双工、全双工、多工。
常见的串行通讯有:RS-232、RS-485、CAN总线等。
串行口控制寄存器包括:串行口控制寄存器SCON(控制工作方式)、电源控制寄存器PCON(控制波特率)。
SM0、SM1选择工作方式,SM2用于多机通信,REN允许接收控制位,TB8/RB8发送/接收数据D8位,TI/RI为发送/接收中断标志位。
2.1.2 74LS164串行口工作于方式0,发送数据时,是把串行端口设置成“串入并出的”输出口。
将它设置为“串入并出”输出口时,需外接1片“串入并出”同步移位芯片74LS164或CD4094,本次设计,用74LS164。
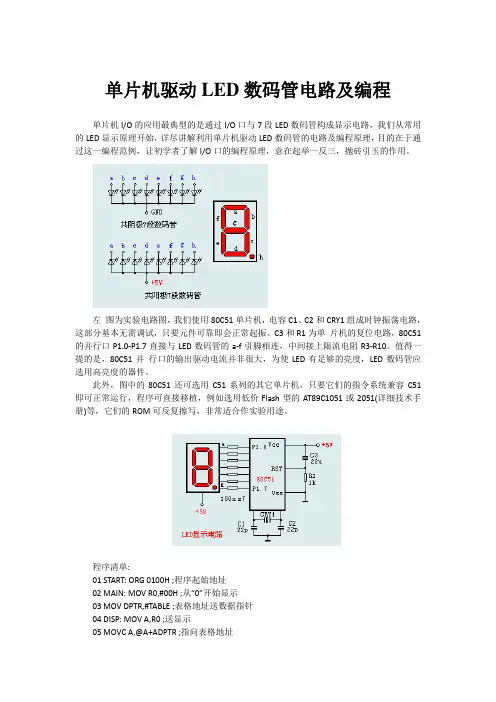
单片机驱动LED数码管电路及编程单片机I/O的应用最典型的是通过I/O口与7段LED数码管构成显示电路,我们从常用的LED显示原理开始,详尽讲解利用单片机驱动LED数码管的电路及编程原理,目的在于通过这一编程范例,让初学者了解I/O口的编程原理,意在起举一反三,抛砖引玉的作用。
左图为实验电路图,我们使用80C51单片机,电容C1、C2和CRY1组成时钟振荡电路,这部分基本无需调试,只要元件可靠即会正常起振。
C3和R1为单片机的复位电路,80C51的并行口P1.0-P1.7直接与LED数码管的a-f引脚相连,中间接上限流电阻R3-R10。
值得一提的是,80C51并行口的输出驱动电流并非很大,为使LED有足够的亮度,LED数码管应选用高亮度的器件。
此外,图中的80C51还可选用C51系列的其它单片机,只要它们的指令系统兼容C51即可正常运行,程序可直接移植,例如选用低价Flash型的AT89C1051或2051(详细技术手册)等,它们的ROM可反复擦写,非常适合作实验用途。
程序清单:01 START: ORG 0100H ;程序起始地址02 MAIN: MOV R0,#00H ;从“0”开始显示03 MOV DPTR,#TABLE ;表格地址送数据指针04 DISP: MOV A,R0 ;送显示05 MOVC A,@A+ADPTR ;指向表格地址06 MOV P1,A ;数据送LED07 ACALL DELAY ;延时08 INC R0 ;指向下一个字符09 CJNE R0,#0AH,DISP ;未显示完,继续10 AJMP MAIN ;下一个循环11 DELAY: MOV R1,#0FFH ;延时子程序,延时时间赋值12 LOOP0: MOV R2,#0FFH13 LOOP1: DJNZ R2,LOOP114 DJNZ R1,LOOP015 RET ;子程序返回16 TABLE: DB 0C0H ;字型码表17 DB 0F9H18 DB 0A4H19 DB 0B0H20 DB 99H21 DB 92H22 DB 82H23 DB 0F8H24 DB 80H25 DB 90H26 END ;程序结束。
用单片机驱动LED数码管有很多方法,按显示方式分,有静态显示和动态(扫描)显示,按译码方式可分硬件译码和软件译码之分。
静态显示就是显示驱动电路具有输出锁存功能,单片机将所要显示的数据,显示数据稳定,占用很少的CPU时间。
动态显示需要CPU时刻对显示器件进行数据刷新,显示数据有闪烁感,占用的CPU时间多。
这两种显示方式各有利弊;静态显示虽然数据稳定,占用很少的CPU时间,但每个显示单元都需要单独的显示驱动电路,使用的硬件较多;动态显示虽然有闪烁感,占用的CPU时间多,但使用的硬件少,能节省线路板空间。
硬件译码就是显示的段码完全由硬件完成,CPU只要送出标准的BCD码即可,硬件接线有一定标准。
软件译码是用软件来完成硬件的功能,硬件简单,接线灵活,显示段码完全由软件来处理,是目前常用的显示驱动方式。
比较常用的显示驱动芯片有:74LS164 , CD4094+ULN2003(2803) ,74HC595+ULN2003(2803) , TPIC6B595,AMT9095B, AMT9595等许多。
另外,市场上还有一些专用的LED扫描驱动显示模块如MAX7219等,功能很强,价格稍高一些。
下面是一个用74LS164驱动显示的例子和一个用4094扫描驱动显示的例子:上例图中加了一个PNP型的三极管来控制数码管的电源,是因为164没有数据锁存端,数据在传送过程中,对输出端来说是透明的,这样,数据在传送过程中,数码管上有闪动现象,驱动的位数越多,闪动现象越明显。
为了消除这种现象,在数据传送过程中,关闭三极管使数码管没电不显示,数据传送完后立刻使三极管导通,这样就实现锁存功能。
这种办法可驱动十几个164显示而没有闪动现象。
这个例子是用4094做位选,用89C2051的P1口线做段驱动来扫描驱动9位数码管的显示。
由于4094只有8个输出口线,其中第九位是用CPU口线直接进行位选的。
9个LED的所有相同位置的段口线都接到一起,然后接到单片机的一个口线上,供八段,使用8条CPU 口线。
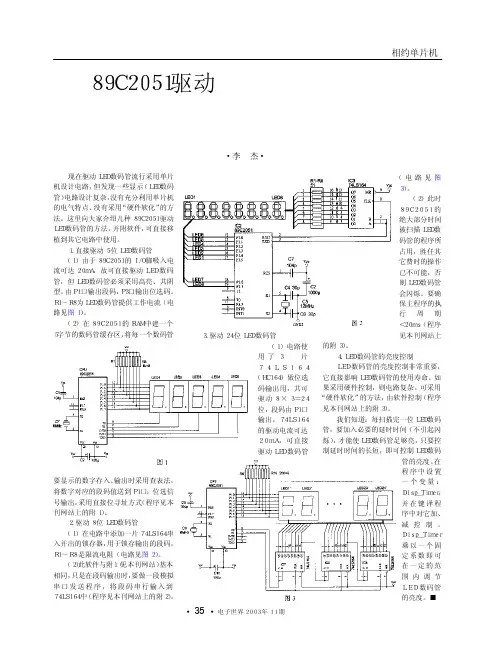
电子世界2003年11期35・・相约单片机图1图2现在驱动LED数码管流行采用单片机设计电路,但发现一些显示(LED数码管)电路设计复杂,没有充分利用单片机的电气特点、没有采用“硬件软化”的方法。
这里向大家介绍几种89C2051驱动LED数码管的方法,并附软件,可直接移植到其它电路中使用。
1.直接驱动5位LED数码管(1)由于89C2051的I/O脚吸入电流可达20mA,故可直接驱动LED数码管,但LED数码管必须采用高亮、共阴型。
由P1口输出段码,P3口输出位选码。
R1~R8为LED数码管提供工作电流(电路见图1)。
(2)在89C2051的RAM中建一个5字节的数码管缓存区,将每一个数码管要显示的数字存入。
输出时采用查表法,将数字对应的段码值送到P1口;位选信号输出,采用直接位寻址方式(程序见本刊网站上的附1)。
2.驱动8位LED数码管(1)在电路中添加一片74LS164串入并出的锁存器,用于锁存输出的段码,R1~R8是限流电阻(电路见图2)。
(2)此软件与附1(见本刊网站)基本相同,只是在段码输出时,要做一段模拟串口发送程序,将段码串行输入到74LS164中(程序见本刊网站上的附2)。
89C2051驱动LED数码管的方法・李 杰・3.驱动24位LED数码管(1)电路使用了3片74LS164(HC164)做位选码输出用,共可驱动8×3=24位,段码由P1口输出。
74LS164的驱动电流可达20mA,可直接驱动LED数码管(电路见图3)。
(2)此时89C2051的绝大部分时间被扫描LED数码管的程序所占用,胜任其它费时的操作已不可能,否则LED数码管会闪烁。
要确保主程序的执行周期<20ms(程序见本刊网站上的附3)。
4.LED数码管的亮度控制LED数码管的亮度控制非常重要,它直接影响LED数码管的使用寿命。
如果采用硬件控制,则电路复杂。
可采用“硬件软化”的方法,由软件控制(程序见本刊网站上的附3)。
单片机数码管显示实验心得
一、实验介绍
本次实验是单片机数码管显示实验,通过单片机控制数码管的显示,
学习单片机的基本操作和编程技巧。
二、实验器材
1. 单片机开发板
2. 数码管模块
3. 杜邦线
三、实验原理
数码管是一种数字显示器件,由多个发光二极管组成。
常见的数码管
有共阳极和共阴极两种类型。
共阳极数码管的所有阳极都连接在一起,而共阴极数码管的所有阴极都连接在一起。
在控制数码管时,需要根
据具体情况选择合适的驱动方式。
四、实验步骤
1. 连接硬件:将数码管模块与单片机开发板通过杜邦线连接。
2. 编写程序:使用Keil C51软件编写程序,实现对数码管的控制。
3. 下载程序:将程序下载到单片机开发板中。
4. 调试程序:通过调试工具观察程序运行情况,并进行调试修改。
五、编程要点
1. 数字转换:将需要显示的数字转换为对应的七段码。
2. 位选控制:根据具体情况选择共阳极或共阴极驱动方式,并实现位选控制。
3. 时序控制:通过延时函数或定时器实现数码管的动态显示效果。
六、实验心得
本次实验让我深入了解了单片机的基本操作和编程技巧,对数码管的控制有了更深入的了解。
在编写程序过程中,我遇到了一些问题,如数字转换不正确、位选控制不准确等,通过查阅资料和调试程序最终得以解决。
同时,在进行实验前需要认真检查硬件连接是否正确,避免出现连接错误导致无法正常工作的情况。
总之,本次实验让我收获颇丰,对单片机编程有了更深入的理解和掌握。
单片机驱动数码管电路数码管是一种常见的电子显示器件,它可以显示数字、字母和其他特殊字符。
而单片机作为一种集成电路,能够通过编程来控制外部设备的工作,因此可以很方便地用来驱动数码管。
本文将介绍单片机驱动数码管电路的原理和实现方法。
一、数码管的工作原理数码管由若干个发光二极管(LED)组成,每个发光二极管都有两个引脚:一个是正极,用于接收电流;另一个是负极,用于接收控制信号。
数码管通常分为共阳极和共阴极两种类型。
共阳极数码管的正极连接在Vcc(正电源)上,负极通过控制信号接地。
当控制信号接地时,相应的发光二极管会亮起;当控制信号断开连接时,相应的发光二极管会熄灭。
通过控制不同的发光二极管,可以显示不同的数字或字符。
共阴极数码管与共阳极数码管相反,正极通过控制信号接地,负极连接在Vcc上。
二、单片机驱动数码管的原理单片机可以通过IO口输出高低电平来控制数码管的工作。
以共阳极数码管为例,当IO口输出高电平时,相应的数码管发光二极管亮起;当IO口输出低电平时,相应的数码管发光二极管熄灭。
为了实现多位数码管的显示,通常需要使用译码器。
译码器可以将单片机输出的数字信号转换为对应的控制信号,从而实现对数码管的驱动。
常用的译码器有BCD译码器和数码管驱动IC等。
三、单片机驱动数码管的实现方法1. 硬件连接将单片机的IO口与数码管的控制引脚连接。
通过接线将单片机的IO口与译码器的输入引脚相连,然后将译码器的输出引脚与数码管的控制引脚相连。
同时,将数码管的电源引脚与电源连接,确保正极连接在Vcc上,负极连接在GND上。
2. 编程控制在编程时,首先需要定义数码管显示的内容。
可以使用数组或变量来存储需要显示的数字或字符。
然后,将需要显示的内容转换为对应的译码器输入信号,通过单片机的IO口输出给译码器。
最后,通过循环控制,不断更新数码管的显示内容,实现动态显示效果。
四、总结通过单片机驱动数码管电路,可以实现对数码管的灵活控制。